1.
Pojęcie ruchu i wielkości opisujące ruch; układy odniesienia
Ruch jest
to zmiana położenia ciała względem wybranego układu odniesienia w czasie.
Położenie punktu materialnego względem układu odniesienia opisywane jest za pomocą
podania, co najmniej 3 w
spółrzędnych. Torem ruchu jest krzywa lub prosta utworzona przez
punkty
określające kolejne położenia ciała w przestrzeni natomiast długość toru nazywamy
drogą.
Wielkościami opisującymi ruch jest prędkość i przyspieszenie. Mamy prędkość chwilową v=
;
średnią v
śr1
q=
, podobnie jest z przyspieszeniem a=
; a
śr
=
Układ odniesienia zależy tylko od nas, jaki wybierzemy, jest to układ współrzędnych związany
z ciałem względem, którego opisujemy ruch.
2.Wielkości skalarne, wektorowe i działania na tych wielkościach. Podać
przykłady wielkości fizycznych o charakterze skalarnym i wektorowym.
Skalar
– wielkość niezależąca od kierunku: np. temp. Praca, czas, ładunek
Wielkość wektorowa: wielkość, która zależy od kierunku. Posiadają oprócz wartości kierunek
zwrot i punkt
przyłożenia np. prędkość, przyspieszenie, siła, natężenie pola elektrycznego
Działania na wektorach: dodawanie, mnożenie przez skalar, mnożenie przez wektor
a◦b=|a||b| cosα
mnożenie skalarne
a×b=|a||b| sinα
mnożenie wektorowe
3. Pojęcia prędkości liniowej i kątowej, przyspieszenia - liniowego i
kątowego, składowe prędkości i przyspieszenia w układach kartezjańskim
i biegunowym.
Liniowe:
zależność:
kątowe:
V=
v=ω×v
ω=
[rad/s]
a=
a=
ε×v
ε=
[rad/s
2
]
Przyspieszenie dośrodkowe : a
d
=
=
ω
2
r normalne, prostopadle do ruchu
Przyspieszenie styczne: a
s
=
- nie zmienia kierunku ruchu
4.
Klasyfikacja ruchów punktu materialnego i bryły sztywnej
Punkt materialny- to pun
kt obdarzony masą, którego rozmiary i kształt możemy pominąć. Bryła
sztywna to zbiór punktów materialnych, które nie zmieniają odległości miedzy sobą.
Ruchy bryły sztywnej:
a)
Ruch postępowy – jest to taki ruch, w którym każdy z punktów bryły porusza się po
takim samym torze w tym samym czasie. Tor ten może mieć dowolny kształt (nie musi
być prostoliniowy).
b) Ruch obrotowy- to
ruch, w którym punkty materialne poruszają się po okręgach,
których środki leżą na jednej prostej zwanej osią obrotu, a ta oś jest prostopadła do
płaszczyzny okręgów. Podstawowym prawem opisującym ruch bryły sztywnej jest
druga zasada dynamiki ruchu obrotowego:
gdzie
gdzie M jest momentem siły względem obranego punktu odniesienia, a L - krętem (momentem
pędu) względem tego samego punktu odniesienia.
5. Pojęcie środka masy i jego rola w opisie ruchu bryły sztywnej
Środek masy – może być uważany, jako punkt materialny, który porusza się tak jakby
skupiona była w nim cala masa bryły
Cechy środka masy:
-gdy na
bryłę nie działają siły zewnętrzne wtedy środek pozostaje w spoczynku
lub porusza się ruchem jednostajnie prostoliniowym
-
gdy bryła jest jednorodna to środek jest w środku symetrii wektor położenia
Rola w opisie
– całą masę bryły możemy skupić w jeden punkt, co znacznie ułatwi
nam pracę w zadaniach z bryłami
W środku ciężkości przyłożona jest wypadkowa siła ciężkości danego ciała.
6. Podać przykłady składania ruchów punktu materialnego i bryły
sztywnej
-
dwa pociągi poruszają się, wybieramy układ odniesienia, którym jest ziemia
- Ziemia. Rotacja kuli
wokół własnej osi i ruch punktu materialnego dookoła słońca.
-
łódź płynie po rzece z prądem, układem jest brzeg
-
człowiek porusza się po ziemi
- z
acznijmy od ruchu koła w samochodzie - bryła sztywna to koła, ruch punktu materialnego to
ruch środka koła względem ziemi a ruch obrotowy to obrót koła.
7. Transformacje Galileusza między różnymi układami odniesienia.
Transformacje Galileusza
– to transformacje współrzędnych przestrzennych i czasu z jednego
układu odniesienia do innego poruszającego się ruchem jednostajnym prostoliniowym
względem pierwszego. W transformacjach tych czas i odległości pozostają równe i nie ulegają
zmianie.
Gdy wektory poruszają się w przeciwne strony to je dodajemy
Gdy wektory przemieszczenia poruszają się w te same strony to je odejmujemy od siebie.
8. Trzy prawa dynamiki Newtona dla punktu materialnego i bryły sztywnej.
Rola siły i momentu siły, masy i momentu bezwładności.
1) ciało, na które nie działa żadna siła lub wypadkowa jest równa 0 pozostaje w spoczynku lub
porusza się ruchem jednostajnym prostoliniowym
2) jeśli siły działające na ciało nie równoważą się to ciało porusza się z przyspieszeniem
wprost proporcjonalnym do siły wypadkowej a odwrotnie proporcjonalnym do masy ciała
3)
Oddziaływania ciał są zawsze wzajemne. Siły wzajemnego oddziaływania dwóch ciał mają
takie same wartości, taki sam kierunek, przeciwne zwroty i różne punkty przyłożenia (każda
działa na inne ciało).
Wielkości dynamiczne ruchu obrotowego:
a) M-
moment siły, to ona nadaje ruch ciału, kierunek, za pomocą śruby prawoskrętnej
M=vxF
b) I-
moment bezwładności wpływa na przyspieszenie kątowe
I=∫r
2
ds
c) L-
moment pędu
L= rxp = mrxv L=p
Zasady dynamiki dla ruchu obrotowego:
1) Bryła nie obraca się lub obraca się ruchem jednostajnym, gdy nie działają na nią żadne
momenty sił lub gdy się równoważą
2)
Mówi ona, że jeśli na pewne ciało, które posiada pewien swój moment bezwładności I
zadziałają zewnętrzne siły, które wywrą na to ciało pewien wypadkowy moment siły M, to w
wyniku tego działania ciało będzie obracać się z przyspieszeniem kątowym takim, że
3) taka sama jak III zasada dynamiki Newtona
9. Pojęcie pędu i prawo zachowania pędu dla punktu materialnego i
układów punktów materialnych. Rola środka masy w ruchu układu.
Wektor pędu to iloczyn masy i wektorów prędkości ciała p= m x V. Wektor p i V mają zawsze
taki sam kierunek.
Pęd układu cząstek jest równy iloczynowi całkowitej masy układu i
prędkości, jego środka masy.
Układ ciał nazywamy odosobnionym, jeżeli dla każdego ciała tego układu wszystkie siły
działające na niepochodzących od ciał zewnętrznych równoważną się dF/dt=0
Zasada zachowania
pędu: wektor pędu zamkniętego układu ciał nie zmienia się z upływem
czasu:
F=
Smrodek masy
porusza się jak punkt materialny, w którym skupiana jest cała masa układu i
na
który działa siła równa wypadkowej sil zewnętrznych przyłożonych to układu.
10.
Pojęcie momentu pędu i prawo zachowania momentu pędu dla punktu
materialnego i bryły sztywnej.
Bryła M
e
=
*Pęd – wielkość wektorowa definiowana, jako iloczyn masy i prędkości [kg*m/s].
*Moment pędu – wielkość fizyczna opisująca ruch ciała.
Jeżeli wypadkowy moment sił zewnętrznych względem ustalonej osi obrotu jest równy 0, to
moment pędu bryły tej osi obrotu nie zmienia się podczas ruchu. M
z
=0, to
, to l
z
=const.
W przypadku punktów materialnych:
Jeżeli wypadkowy moment sił zewnętrznych działających na układ jest równy 0, to całkowity
moment pędu układu pozostaje stały. Oznacza to, że momenty pędu poszczególnych punktów
mogą się zmieniać, gdy M
z
=0.
11.
Druga zasada dynamiki, jako równanie ruchu. Podać przykłady.
Druga zasada dynamiki jest pods
tawowym prawem dynamiki ruchu postępowego. Na jego
podstawie
można, bowiem wyznaczyć przyspieszenia ciała, jako skutek sił działających na
ciało. Znając przyspieszenia można obliczyć zarówno wartości początkowe prędkości jak i
wektor położenia ciała w dowolnej chwili. Przykładem może być zestaw bloczków - ? a=
12.
Opisać ruch drgający harmoniczny. Podać przykłady.
Ruch harmoniczny to ruch niejednostajnie zmienny, który jest drgający, okresowy i określony
jest przez funkcję sinusoidalną:
x=A*sin
(Ωt+φ)
A - Amplituda, maksymalne wychylenie
Ωt+φ – faza ruchu harmonicznego, określa położenie w danej chwili
φ – faza początkowa
Ω - częstość (?) kołowa – określa prędkość zmiany fazy w czasie.
F=-kx
E
p
=
kx
2
Ω=
√
E
k
=
mV
2
Siła tłumiąca: md
2
x/dt
2
+ Adx/dt +kx=0
dx/dt -
siła tłumiąca
kx
– siła sprężysta
13.
Definicja pracy, związek między pracą i energią.
Praca
jest wielkością skalarną, jej jednostką jest [J]=[N*m]=[(kg*m
2
)/s
2
]
W=F*l=|F|*|l|*cos α gdzie l- to długość np. drogi lub wysokość
W=
∫
- praca wynosi
pole powierzchni pod krzywą
Moc
– wielkość skalarna, jednostką jest wat [W] = [J/s]=[N*m/s]
P=
Energia
– wielkość skalarna będąca miarą zdolności ciała do wykonania (pracy?). Praca
wykonana przez siłę wypadkową działającą na jakieś ciała jest równe przyrostowi energii
kinetycznej.
Praca w rzeczywistości odbywa się kosztem jakiejś energii, albo dodając czemuś energie.
Dlatego są one od siebie uwarunkowane. Na przykład woda poprzez swoją pracę (spadek z
wysokości) daje energię w elektrowni wodnej poprzez napędzanie turbin

14.
Pojęcie energii kinetycznej i potencjalnej, prawo zachowania masy
energii mechanicznej dla punktu materialnego i bryły sztywnej.
Energia kinetyczna
– różnica między energią całkowitą i energią spoczynkową
E
k
= E-E
0
(m-m
0
)c
2
E
k
= mV
2
/2
Energia potencjalna
– o tej energii możemy mówić tylko wtedy, gdy na układ działają siły
zachowawcze. Siły zachowawcze to siły, których praca wykonana przy przemieszczaniu po
torze zamkniętym jest równa 0, a więc praca zależy od odległości między dwoma punktami, a
nie od
drogi, która zostanie pokonana oraz prędkości, z jaką zostanie pokonana.
Energia potencjalna to energia oddziaływań układu ciał, gdyż oddziaływania te wiążą się, z co
najmniej dwoma siłami. ΔE
p
= -W= -
∫
Zasada zachowania energii
Energia układu zamkniętego, w którym działają siły zachowawcze równa jest sumie jego
energii potencjalnej i kinetycznej, ma tę samą wartość na początku i na końcu jakiegoś
procesu mechanicznego.
E = E
p
+E
k
=const
15.
Zderzenia sprężyste i niesprężyste
Przy zderzeniach kul siły zderzeń są znacznie większe niż pozostałe siły i dlatego można
uznać to za układ zamknięty i stosować zachowanie pędu.
Zderzenia
sprężyste
zarówno pęd jak i energia kinetyczna układu
kul
pozostają stałe
niesprężyste
energia kinetyczna zostaje zmieniona (jest
mniejsza niż wcześniej); pęd pozostaje bez
zmian
centralne
niecentralne
16.
Różne rodzaje sił – siły fizyczne i pozorne, zachowawcze i
niezachowawcze. Podać przykłady.
Siły:
Zachowawcze
– wykonana praca przy przemieszczeniu ciała po torze zamkniętym jest równa
zero (np. oddziaływania elektrostatyczne, grawitacja, siły centralne);
Niezachowawcze
– praca wykonana przez tę siłę nad punktem materialnym po drodze
zamkniętej nie jest równa zero (siła, tarcie);
Fizyczne
– (oddziaływania fizyczne)
grawitacyjne
elektromagnetyczne
silne oddziaływanie – odpowiada za łączenie się kwantów oraz nukleonów, posiada
ograniczony zasięg
słabe oddziaływanie – występuje pomiędzy wszystkimi podstawowymi fermionami, ma
ograniczony zasięg
Pozorne
– (siły, których efekty obserwujemy w układach nieinercjalnych) – inaczej
bezwładności
-
siła bezwładności w hamowaniu lub przyspieszaniu
-
siła odśrodkowa
-
siła Coriolisa
Cechy siły bezwładności:
a)
siła nie jest wywoływana przez oddziaływania między ciałami lecz od przyspieszenia;
b)
działają tylko w układach nieinercjalnych
c)
zależą od masy
d)
siły bezwładności są siłami zewnętrznymi
17.
Pojęcie pola sił i wielkości opisujące to pole, porównać pole
grawitacyjne z polem ele
ktrostatycznym. Porównać pole magnetyczne z
elektrycznym.
Pole sił to rodzaj pola wektorowego, w każdym jego punkcie na próbne ciało działa siłą F.
Jeśli F tylko zależy od czasu (t) to pole jest niestacjonarne, a gdy nie zależy to pole nazywamy
stacjonarne.
Wielkości opisujące pole grawitacyjne:
a)
natężenie pola sił – jest równy liczbowo sile, jaką pole działa na punkt materialny o
masie jednostkowej
E = - GMr/r
3
b)
potencjał pola – jest to stosunek pracy, jaką wykonuje siła grawitacji przenosząc ciało z
punk
tu A do C do wartości masy m
V = -GM/r
c) grawitacyjna energia potencjalna
– to praca potrzebna do rozsunięcia dwóch ciał
U=W
Porównać pole magnetyczne z elektrycznym w zad 19.
18. Prawo Gaussa dla pól: grawitacyjnego, elektrycznego i
magnetycznego.
Dla p
ól elektrycznych:
Prawo Gaussa dla elektryczności w fizyce, zwane również twierdzeniem Gaussa, to
prawo wiążące pole elektryczne z jego źródłem, czyli ładunkiem elektrycznym. Natężenie pola
elektrycznego jest polem wektorowym i spełnia twierdzenie Gaussa-Ostrogradskiego.:
Strumień natężenia pola elektrycznego, przenikający przez dowolna powierzchnie
zamkniętą w jednorodnym środowisku o bezwzględnej przenikalności dielektrycznej ε, jest
równy stosunkowi całkowitego ładunku znajdującego się wewnątrz tej powierzchni do wartości
tejże przenikalności.
Strumień Φ natężenia pola elektrycznego E, przenikający przez zamkniętą
powierzchnię S, ograniczającą obszar o objętości V, jest proporcjonalny do ładunku
elektrycznego Q zawartego w tym obszarze (objętości).
Gdzie:
wektor ds jest wektorem powierzchni,
współczynnikiem proporcjonalności jest przenikalność elektryczna próżni ε
0
Dla pól magnetycznych:
Całkowity strumień indukcji magnetycznej przechodzący przez powierzchnie zamkniętą
równa się zeru. Fakt ten wynika stąd, iż pole magnetyczne jest bezźródłowe – nie istnieją
ładunki magnetyczne, dywergencja pola jest wszędzie równa zero.
Dla pól grawitacyjnych:
Gdzie:
wektor g
– natężenie pola grawitacyjnego
G
– stała grawitacji
Strumień natężenia pola przez powierzchnię zamkniętą S równy jest całkowitej masie M
zamkniętej przez tę powierzchnię pomnożonej przez − 4πG.

19
. Porównać pole magnetyczne z polem elektrycznym.
Wielkości opisujące pola:
a)
Natężenie – to stosunek siły, jaka działa na dodatni (próbny) ładunek umieszczony w
pun
kcie do wartości ładunku
E=
b)
Potencjał – to stosunek energii potencjalnej ładunku próbnego umieszczonego w tym
pun
kcie do wartości tego ładunku
Pole grawitacyjne:
Siła: F=-G
r
Źródło: obiekty mające masę
Rodzaj: pole ce
ntralne(linie pola przecinają się w jednym punkcie) lub jednorodne (linie są
równoległe)
Ruch: występuje ruch niejednostajnie przyspieszony
Skutki: powoduje ruch planet, przyciąga wszystko, co ma masę
Pole elektrostatyczne:
Siła: F=k
prawo Kulomba
Źródło: ładunki elektryczne
Oddziaływanie: przyciąganie lub odpychanie
Rodzaj: tak samo jak w grawitacyjnym
Ruch: występują ruchy jednostajnie lub niejednostajnie przyspieszone, ładunek porusza się
równolegle do linii pola
Skutki: powoduje przepływ prądu indukcyjnego, zmienne pole elektryczne powoduje
powstanie zmiennego pola magnetycznego, silne pole wpływa na układ nerwowy powodując
opóźnienie czasu reakcji
Pole magnetyczne:
Siła: F=qv×B v-prędkość ładunku B-indukcja magnetyczna
Źródło: stałe pole magnetyczne wytwarzane jest przez ładunki elektryczne znajdujące się w
ruchu jednostajnym
-wytwarzane przez zmienne pole elektryczne
-magnes
Pole jest
bezźródłowe, czyli linie pola są zamknięte
Ruch: Siła nie ma wpływu na wartość ruchu, lecz tylko na kierunek ruchu, bo prędkość i
indukcja magnetyczna jest zawsze prostopadła do siły. Cząsteczka porusza się po spirali.
Skutki: działa na przewodniki z siła równa F=Il×B (I-natężenie, l-długość B-indukcja
magnetyczna) Linie indukcji B są zawsze liniami zamkniętymi, co jest główna różnica miedzy
pole elektrycznym, bo tam linie
zaczynają się i kończą w ładunkach
Wielkości opisujące to pole:
a) Indukcja magnetyczna B
– nie określa się jej, wprost lecz na podstawie siły Lorenza
(
F=qv×B), to siła działająca na poruszający ładunek
b)
Natężenie pola H – wielkość wektorowa charakteryzująca pole magnetyczne, w
ogólnym przypadku określana z użyciem prawa Ampera
I
–prąd przepływający
Zależność:
B=μH μ-przenikalność magnetyczna H=[amper/metr] B=[tesla]=[N/A*m]
2
0. Kondensator, pojemność kondensatora, pole kondensatora płaskiego
z dielektrykiem i bez dielektryka.
Kondensator to układ dwóch przewodników, który może gromadzić ładunek
elektryczny przy
dużej różnicy potencjałów. Okładki mogą być dowolnych kształtów i
rozmiarów, a ładuje się je równymi ładunkami o przeciwnych znakach. Pojemnością
elektryczną nazywamy stosunek ładunku do różnicy potencjałów (napięcia) między
okładkami.
C=
C=[farad]
O pojemności nie decyduje ładunek lub napięcie, lecz kształt i wymiar okładek.
Dielektryki są ciałami, które nie przenoszą ładunków elektrycznych. Umieszczenie
dielektryka w polu elektrycznym kondensatora powoduje oddziaływanie pola z
ładunkami dielektryka, zmiany natężenia tego pola, różnicy potencjałów i pojemności
kondensatora. Do opisu zjawisk nie wystarczy jeden wektor, lecz
trzeba użyć:
natężenie pola E, indukcję elektrostatyczną D i polaryzacje P.
D=ε
0
E+P
Jeżeli dielektryk umieszczony jest w polu elektrycznym to pojawią się ładunki
indukowane powierzchniowe, kt
óre osłabią pole wewnątrz dielektryka, spowoduje to
zmniejszenie różnicy potencjałów.
Łączenie kondensatorów: Szeregowo
U=const.
Q=ΣQi
Równolegle
C=
U=ΣUi
Q=const.
21. Pojęcie prądu elektrycznego i wielkości opisujące prąd elektryczny,
prawa Ohma i Kirchhoffa.
Prąd to uporządkowany i ustalony ruch ładunków. Nośnikami ładunków w przewodnikach
mogą być ładunki dodatnie i ujemne. Wielkości opisujące prąd:
a)
Natężenie prądu: I=dq/dt –zmienny I=q/t – stały I=[A]=[C/s]
b)
Gęstość prądu: j=I/A A-powierzchnia prostopadła do ruchu ładunków j=Di/Da
c)
Napięcie U
d)
Prędkość unoszenia: V
u
– przy zderzeniach elektronów tracona jest cześć energii
kinetycznej, lecz potem pole
znów rozpędzi elektrony powodując ze średnią prędkość
jest taka sama. Jest ona
równoległa do natężeń pola i ma zwrot przeciwny do
natężenia
Prawo Ohma: stosunek
napięcia do przyłożonego do przewodnika do natężenia prądu
przewodnika jest stały.
R=U/I R=pl/s l-
długość s-przekrój p-opor właściwy
Prawo Kirchhoffa:
1) suma
natężeń wpływających do węzła jest równa sumie natężeń wypływających z węzła
2) suma
spadków i wzrostów napiec oraz SEM w oczku wynosi 0.
SEM- jest to
różnica potencjałów (napięcia) na biegunach źródła prądu, kiedy przez ogniwo
nie płynie prąd
SEM=
SEM=I(R
w
+R
z
)
Łączenie oporników:
szeregowo: R=
ΣRi
r
ównolegle:
22. Przepływ prądu przez elektrolity - prawa Faradaya, przepływ prądu
przez gazy.
Przepływ prądu przez elektrolity jest możliwy dzięki istnieniu jonów obu znaków, które
powstają w wyniku dysocjacji. Jony przenosza ładunki.
Elektroliza-
to wytwarzanie się substancji na elektrodach podczas przepływu prądu,
warunkiem elektrolizy. Jest to, że elektrody nie rozpuszczają się w elektrolicie.
Dodatnia-anoda, ujemna-katoda.
I Prawo Faradaya- Masa wydzielonej substancji jest proporcjonalna do
ładunku, jaki przepływa
przez elektrolity.
M=k*q, k-
równoważnik elektrochemiczny q - ładunek [C]
II Prawo Faradaya-
równoważniki elektrochemiczne pierwiastków są proporcjonalne do ich
równoważników chemicznych.
=
=
, gdzie równoważnik chemiczny jest stosunkiem masy atomowej A danego
pierwiastka do jego wartości.
k=
-
to można podstawić do I Prawa Faradaya i wyjdzie położenie
Przepływ prądu przez gazy: Gazy są przeważnie dielektrykami i nie przewodzą prądu,
stają się one przewodnikami dopiero, gdy działa czynnik powodujący jonizacje gazu. Są to np.;
promieniowanie nadfioletowe, rentgenowskie, promieniowanie kosmiczne- Przewodnictwo
gazów spowodowane jest, więc działaniem jonizatora, a nie pola elektrycznego, nazywa się to
przewodzeniem niesamowitym. Łączenie się jonów w gazach nazywa się …………….
Występuje, gdy liczba jonów wytwarzanych jest większa niż liczba jonów rekombinujących ze
sobą.
Plazma-
gazy silnie zjonizowane, w których koncentracja jonów i elektronów jest bardzo silna.

23.Pole magnesu stałego przewodnika z prądem, cewki.
Magnes stały (trwały) -jest najbardziej znanym urządzeniem wytwarzającym pole
magnetyczne. Magnes ten posiada dwa bieguny N i S. W polu magnetycznym wytworzonym
przez magnesy stałe istnieją punkty maksymalnego zagęszczenia. Linie pola mają kierunek od
N do S. Magnes ten zbudowany jest z materiału ferromagnetycznego. Gdy podzielimy go na 2
części powstaną dwa nowe magnesy, co oznacza, że nie da się rozdzielić biegunów.
Przewodnik
prostoliniowy, przez który płynie prąd wytwarza pole magnetyczne, jego linie
tworzą okręgi, które są prostopadłe do przewodnika i środkach leżących na przewodniku.
Zwr
ot wyznacza się przy pomocy reguły prawej dłoni: jeśli kciuk prawej dłoni ustawimy w ten
sposób, by pokazywał kierunek płynącego prądu, to pozostałe palce pokażą zwrot linii pola
magnetycznego.
Wartość natężenia magnetycznego wytworzonego przez nieskończenie długi przewodnik jest
proporcjonalne do natężenia prądu i odwrotnie proporcjonalne do długości od przewodnika.
Cewka
– składa się z pewnej liczby zwojów.
ɸ=li
C =
SEM-
siła elektromotoryczna
ɸ - strumień indukcji pola
i
– natężenie prądu
C
– stała cewki
H
– natężenie pola magnetycznego
J
– natężenie prądu
Solenoid
– cewka indukcyjna, w środku pole wytworzone jest stosunkowo duże a na zewnątrz
maleje.
24. Oddziaływanie wzajemne pola magnetycznego i prądu. Siła
elektrodynamiczna, indukcja pola magnetycznego B, prawo Ampera,
oddziaływanie dwóch przewodników z prądem.
Siła działająca na przewodnik z prądem
⃗ =I x ⃗ =qv x B
I
– natężanie
B-indukcja
Prawo Ampera
– prawo wiążące indukcję magnetyczną wokół przewodnika z prądem z
natężeniem prądu elektrycznego przepływającego w tym przewodniku. W fizyce jest to
magnetyczny odpowiednik prawa Gaussa i należy do praw fizycznych wynikających z
matematycznego twierdzenia Stokesa.
∮
I
- przenikalność magnetyczna próżni (w henrach na metr),
I-
natężenie prądu objętego krzywą C,

25. Działanie silników elektrycznych i akceleratorów
Silnik elektryczny
prądu stałego zawiera wirnik, w którym znajduje się uzwojenie i komutator.
Wirnik obraca się w polu magnesu stałego. Na każdy ze zwojów wirnika działa moment siły
wprow
adzający ją w ruch. W silnikach prądu stałego istnieje potrzeba zmiany kierunku prądu
w uzwojeniu po obrocie o pewien kąt (np. 180st.) bo kierunek momentu siły zmienił się na
przeciwny, do tego właśnie służy komutator. Prąd płynący w uzwojeniu wykonuje pracę, która
odbierana jest w postaci energii kinetycznej ruchu obrotowego
Bilans energetyczny:
UI=I
2
R+P
– moc mechaniczna
W wyniku pracy tego silnika powstaje SEM
W silniku elektrycznym
prądu stałego wektor indukcji B zmienia się wraz ze zmianami wartości
na
tężenia prądu w uzwojeniu.
Akcelerator
– to urządzenie służące do przyspieszania cząstek elementarnych lub jonów.
Najprostszymi urządzeniami są dzieła elektronowe, które stosuje się w kineskopach
telewizorów i monitorów. Cząstki przyspieszone są polem elektrycznym, pole magnetyczne
stosuje się do nadania cząstkom odpowiedniego toru. Pole elektryczne tworzone jest przez
układy generatorów o bardzo wysokim napięciu, następnie przekazywane na elektrody. Pole
magnetyczne jest tworzone przy pomocy elektromagnesów.
26. Zmienne pola elektryczne i magnetyczne - prawo indukcji Faradaya,
uogólnione prawo Ampera. Prądnica
Prawo indukcji Faradaya: SEM indukowana w obwodzie jest
równa szybkości ubytku
strumienia magnetycznego przenikającego obwód
SEM= -
[V]=
minus ma znaczenie formalne i ma znaczenie dopiero przy
dodatkowych umowach (reguła Lenza)
SEM=
ɸEdl
ɸ=∫ -strumień magnetyczny
Uogólnione prawo Ampera :∮
H
– natężenie pola
I
– natężenie prądu
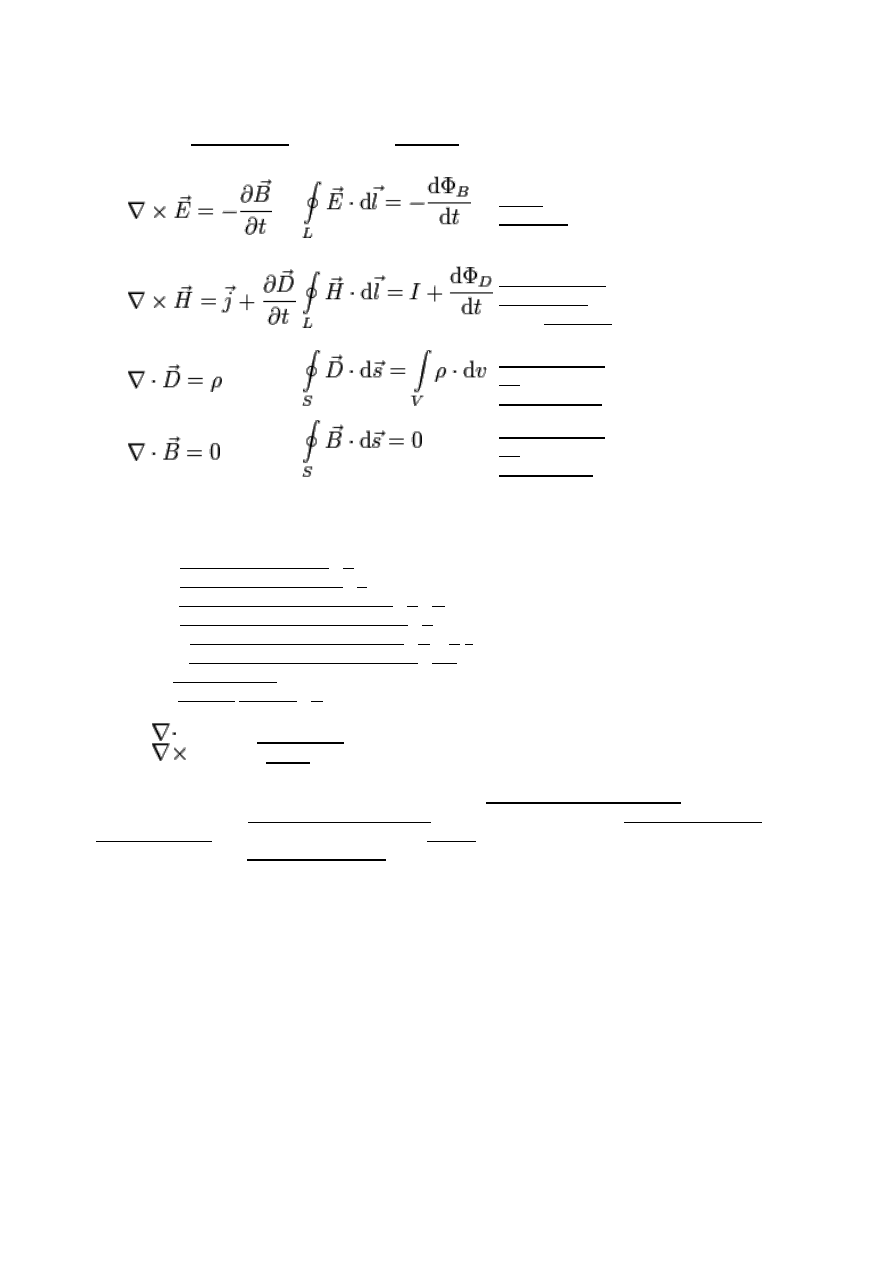
27. Równanie Maxwella i jego zastosowanie
Lp.
Postać różniczkowa
Postać całkowa
Nazwa
Zjawisko fizyczne
opisywane przez
równanie
1.
Zmienne w czasie
pole magnetyczne
wytwarza wirowe pole
elektryczne.
2.
prawo Ampera
rozszerzone
przez Maxwella
Przepływający prąd
oraz zmienne pole
elektryczne
wytwarzają wirowe
pole magnetyczne.
3.
prawo Gaussa
dla
elektryczności
Źródłem pola
elektrycznego są
ładunki.
4.
Pole magnetyczne jest
bezźródłowe, linie pola
magnetycznego są
zamknięte.
gdzie:
D
– indukcja elektryczna [ C / m²]
B
E
– natężenie pola elektrycznego [ V / m ]
H
– natężenie pola magnetycznego [ A / m ]
Φ
D
– strumień indukcji elektrycznej [ C = A·s]
Φ
B
– strumień indukcji magnetycznej [ Wb ]
j
– gęstość prądu [A/m²]
3
]
– operator dywergencji [1/m],
– operator rotacji [1/m].
Równania Maxwella – cztery podstawowe równania elektrodynamiki klasycznej
sformułowane przez Jamesa Clerka Maxwella. Opisują one właściwości pola elektrycznego i
magnetycznego
oraz zależności między tymi polami. Równań Maxwella nie należy mylić z
termodynamicznymi relacjami Maxwella.

28.
Pojęcie fali i parametry charakteryzujące falę. Fale mechaniczne i fale
elektromagnetyczne.
Fala to zaburzenie rozprzestrzeniaj
ące się w ośrodku lub przestrzeni. Fale przenoszą energię
z jednego miejsca do drugiego bez transportu materii,
charakterystycznymi własnościami są:
odbicie, załamanie, dyfrakcja, interferencja, dudnienie
Parametrami charakteryzującymi fale są:
a) Okres (T)
– czas pełnego jednego drgania
b)
Częstotliwość – f. Drgań w czasie [Hz]
c) Amplituda
– maksymalne wychylenie od położenia równowagi
d)
Długość – odległość miedzy dwoma grzbietami
e)
Prędkość rozchodzenia się fali
f)
Promień fali – kierunek rozchodzenia się fali
Fale mechaniczne
– fale rozchodzące się w ośrodkach sprężystych poprzez
rozprzestrzenianie się drgań tego ośrodka. Przykładami fal mechanicznych są: fale morskie,
fale dźwiękowe, fale sejsmiczne. Fale mechaniczne mogą być falami podłużnymi (np. fala
dźwiękowa) lub poprzecznymi (np. fala powstała na linie). W procesie rozchodzenia się fali
zasadnicze znaczenie ma proces odwracalnych przemian potencjalnej energii mechanicznej
(energii ciśnienia bądź naprężenia) w energię kinetyczną.
Fale elektromagnetyczne
– można traktować ją, jako przenoszenie drgań pole
elektromagnetycznego od jednego punkt
do drugiego. Nie wymagają obecności ośrodka i
dlatego mogą rozchodzić się w próżni. Zaburzenia falowe mają charakter fali poprzecznej np.
fale radiowe, mikrofale, podcze
rwień, ultrafiolet, promieniowanie gamma
29. Dyfrakcja, interferencja i polaryzacja fal. Zastosowania
Dyfrakcja (
ugięcie fali) to zjawisko fizyczne zmiany kierunku rozchodzenia się fali na
krawędziach przeszkód oraz w ich pobliżu. Najlepiej widać to zjawisko, gdy rozmiary
niejednorodności ośrodka są porównywalne z długością fali. Zgodnie z zasadą Huygensa fala
rozchodzi się w ten sposób, że każdy punkt fali staje się nowym źródłem fali kulistej. Po
minięciu przeszkody fale zaczynają się na siebie nakładać.
Interferencja
– zjawisko powstawania nowego, przestrzennego układu fali w wyniku
nakładania się (superpozycji) dwóch lub więcej fal.
Interferencja zachodzi dla wszystkich ośrodkach i dla wszystkich rodzajów fal. Aby
zaobserwować maksima i minima interferencyjne konieczne jest, aby źródła fal były konkretne,
czyli miałby taką samą fazę, częstotliwość i długość.
Polaryzacja
– to własność fali poprzecznej. Fala spolaryzowana oscyluje tylko w pewnym
wybranym kierunku. Natomiast fala niespolaryzowana oscyluje we wszystkich kierunkach
jednakowo. Polaryzacje można otrzymać np. przez odbicie od ośrodka przezroczystego,
podwójnie załamanego.
Zastosowanie:
a) dyfrakcji
– badanie fal oraz obiektów o niewielkich rozmiarach w tym i kształtów,
rentgenowskie zdjęcia
b) interferencja -
Interferencja pozwala na bardzo precyzyjny pomiar długości drogi od źródła
do detektora fali. Długość fali może stać się wzorcem odległości, np. metra, co wykorzystuje
interferometr laserowy.
c) polaryzacja
– filtry polaryzujące (np. w dziurach słonecznych), wyświetlacz LCD, projektory
obrazu trójwymiarowego, radary, anteny nadawcze i odbiorcze
30. Fale stojące, dudnienia (akustyka, różne instrumenty muzyczne i ich
strojenie)
Fala stojąca charakteryzuje się tym, że wzdłuż prostej określającej kierunek rozchodzenia się
fali nakładających się na siebie występują punkty całkowitego wygaszenia drgań ( węzły) i
punkt
, w których drgania odbywają się z maksymalna amplituda równa 2A. Odległości
poszczególnych węzłów fali stojącej od źródła określone są zależnością: Z
w
=(Z
n
+1)
n=0,1,2… Odległości strzałek od źródła fali: Z
w
=n
Fala stojąca nie przenosi przez ośrodek żadnej energii, energia każdej cząstki jest stała
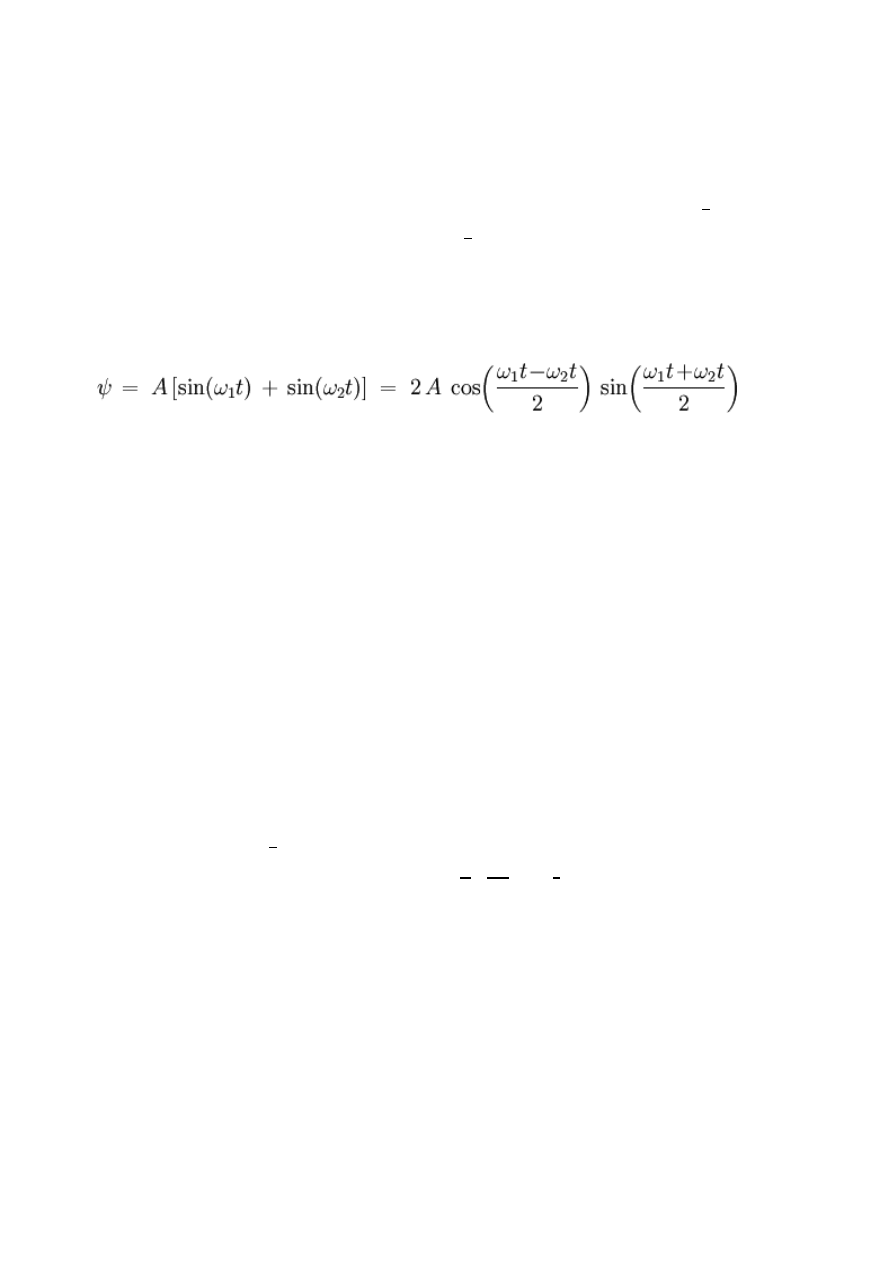
Dudnienia- to okresowe zmiany amplitudy
dźwięku wypadkowej wywołujące specyficzne
wrażenia dźwiękowe polegające na słyszeniu tego dźwięku raz głośnie a raz ciszej. Dudnienie
obserwuje się dla wszystkich rodzajów drgań w tym i wywołanych falami. Równanie dudnień:
Zastosowanie dudnień:
a) strojenie
instrumentów muzycznych, ponieważ im dwie częstotliwości są sobie bliższe tym
dudnienie jest wyraźniejsze a znika przy idealnym dobraniu częstotliwości
b) zmiana
odbieranych częstotliwości w odbiornikach fal radiowych
c)
określanie częstotliwości drgań lub fal poprzez sumowanie fali odebranej i wzorcowe (radia
dopplerowski)
zjawiska związane z efektami akustycznymi i efekt Dopplera
31. Efekt Dopplera.
Polega na względnej zmianie częstotliwości fali odbieranej np. przez ucho w stosunku do
częstotliwości fali wysyłanej ze źródła, gdy źródło i przyrząd odbierający poruszają się
względem siebie
Przypadki:
a)
Źródło jest nieruchome a przyrząd zbliża się z przedmościa v, źródło wysyła fale o
częstotliwości f=
Częstotliwość fali odbieranej jest równa f’=
=(
)f=(1+
)f
–wynika z tego ze, gdy
przyrząd zbliża się do ciała to otrzymana częstotliwość jest większa niż rzeczywista
natomiast, gdy
się oddala to częstotliwość jest mniejsza
b)
Zbliża się do źródła z prędkością v, a przyrząd stoi
Gdy źródło zbliża się częstotliwość jest większą niż w rzeczywistości jest tak, bo zanim
przyjdzie 1
odległość się zmniejszy i drgania są częstsze. Gdy źródło się oddala to
częstotliwość jest mniejsza
c)
Źródło i przyrząd poruszają się – łączy dwa powyższe przypadki
32.
Światło, jako fala elektromagnetyczna.
Drgające ładunki elektryczne wytwarzają w przestrzeni zmienne pole elektryczne, które
zgodnie z prawem Maxwella indukuje zmienne pole magnetyczne, a to z kolei indukuje
zmienne pole elektryczne itd.
Tak, więc drgania pola elektrycznego wzbudzają drgania pola
magnetycznego i odwrotnie.
Drgające pola, które wzajemnie się wzbudzają, nazywamy
promieniowaniem elektromagnetycznym.
Światło, jako fala elektromagnetyczna to
rozchodzące się zaburzenia natężenia pola elektrycznego i magnetycznego. Światło to fala
widzialna dla człowieka o zakresie 390-780nm. Światło o jednakowej długości nazywamy
monochromatycznym.
Światło podlega tym samym prawom, jakim podlegają fale
elektromagnetyczne. W danym
ośrodku wszystkie fale elektromagnetyczne rozchodzą się z
taka sama
prędkością, która wynosi w próżni 300tys. Km/s. Do tych praw należą: interferencja,
dyfrakcja, polaryzacja i efekty kwantowe. Dyfrakcja jest tutaj trudna do
zauważenia, bo światło
często nie jest monochromatyczne, co powoduje zacieranie się obrazu. Polaryzacja pokazuje
ze światło jest fala poprzeczna, najlepiej jednak można je zaobserwować na przykładzie
lasera
33.
Światło, jako strumień fotonów, efekt fotoelektryczny i dwoista natura
światła
Zgodnie z dualizmem korpuskularno-falow
ym światło postrzegane jest, jako fala
elektromagnetyczna oraz jako
strumień fotonów.
Foton-
to cząsteczka elementarna nieposiadająca ładunku elementarnego ani moment
magnetycznego o masie spoczynkowej
równej 0. Fotony są nośnikami oddziaływań
elektromagnetycznych. W fizyce foton jest kwantem pola elektromagnetycznego.
Zjawisko fotoelektryczne polega na:
a)
Emisji elektronów z powierzchni przedmiotu
b)
Przeniesieniu nośników ładunku elektrycznego pomiędzy pasmami energetycznymi
Trzy cechy zjawiska fotoelektrycznego
na dadzą się wyjaśnić za pomocą teorii falowej, z której
wynik:
a)
Energia kinetyczna fotoelektronów powinna wzrastać z natężeniem a tak nie jest
b)
Efekt ten powinien występować dla dowolnej częstotliwości czy odpowiednio dużym
natężeniu, co nie zachodzi
c)
Gdy światło jest dostatecznie słabe elektrony wybijane z katody powinny wykazywać
charakterystyczne
opóźnienie w czasie, czego się nie obserwuje
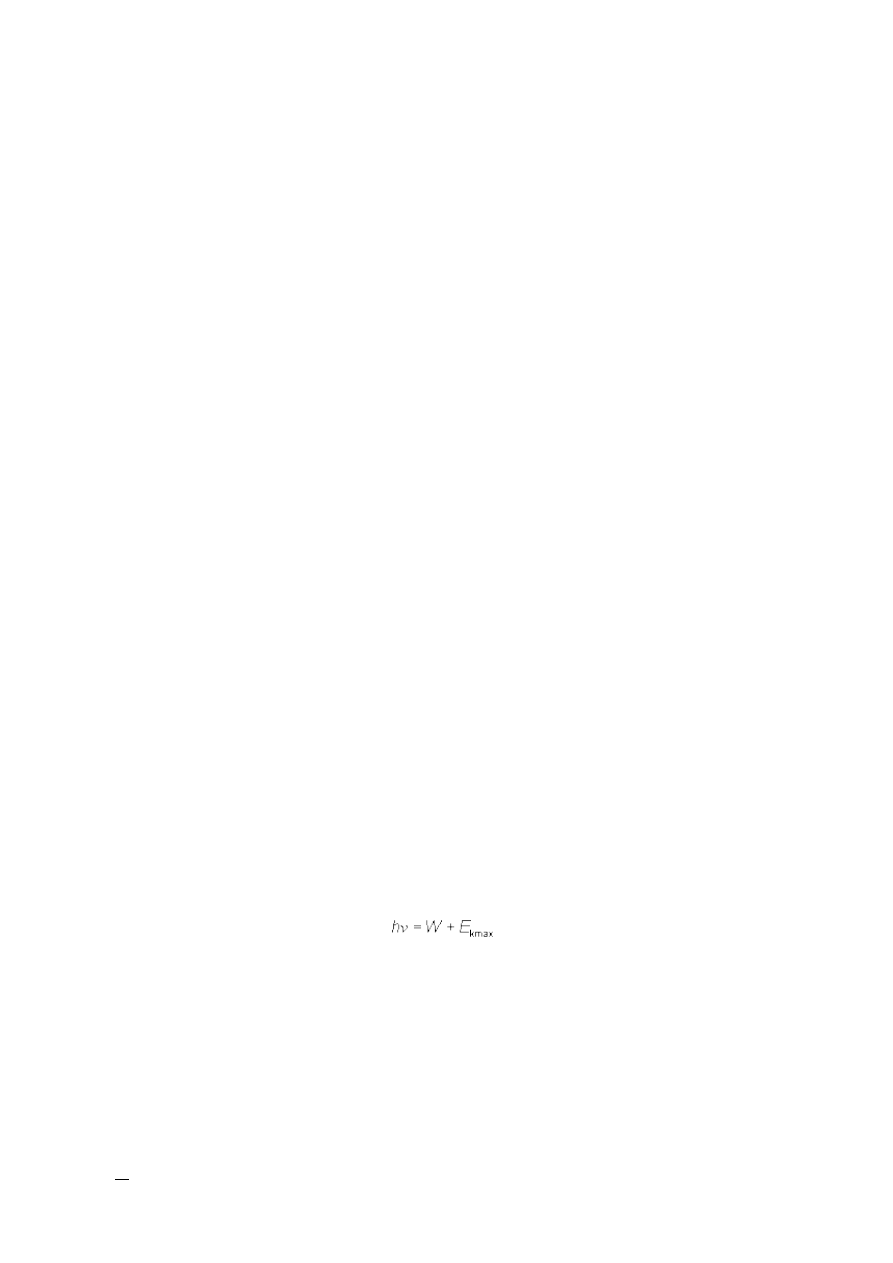
Równanie Einsteina:
Jeżeli do wyrwania elektronu z metalu potrzebna jest energia W to wówczas
E- energia W-praca h-sta
ła Plancka v-częstotliwość padania fotonów
Innym efektem wskazującym na korpuskularną naturę światła jest zjawisko Comptona.
Jest to zjawisko rozproszenia promieniowania X i promieniowania gamma. W wyniku, czego
następuję zwiększenie długości fali promieniowania. Ze wzoru Comptona wynika ze zmiana
długości fali nie zależy od energii fotonu padającego, lecz od kąta rozproszenia.
D
ualizm falowo korpuskularny: nie da się opisać zachowania światła za pomocą jednej
teorii. W pewnych przypadkach promi
eniowanie elektromagnetyczne zachowuje się jak fala o
określonej częstotliwość v lub długości λ a w innych, jako zbiór fotonów o energii E=hv, pędzie
p=
i masie spoczynkowej rowniej 0.Im promieniowanie ma wieksza częstotliwość tym efekty
korpuskula
rne są silniejsze.
34. Dwoista natura materii, fale de’Broglie’a, dyfrakcja elektronów i
neutronów na kryształach
De’Broglie wysunął hipotezę, że cząstki materialne podobnie jak fale elektromagnetyczne
powinny wykazywać cechy falowe i cechy korpuskularne. Według de’Broglie’a cząstka
poruszająca się z pędem p i energią E odpowiada fala płaska o częstotliwości drgań v=
i
długości λ=
. Trzeba pamiętać ze masa spoczynkowa fotonu jest równa zero, a masa
spoczynkowa cząstki jest skończona i równa m
0cz
. Założeniem de’Broglie’a było, że cząstce
można przypisać falę płaską, lecz takie fale w rzeczywistości nie istnieją i raczej do opisu
wykorzystuje
grupę fal o różnych częstotliwościach, lecz określonej prędkości grupowej. Aby
zaobserwować interferencje dla fali de’Broglie’a należy użyć siatki dyfrakcyjnej o stałej
nieróżniącej się dużo od długości padającego promieniowania. Dyfrakcja fali na krysztale
polega na selektywnym wzmocnieniu fal odbitych w niektórych tylko kierunkach.
Każdy atom kryształu, na który pada fala sam staje się źródłem nowej fali o tej samej długości
(zasada Huygensa). Fale wtórne emitowane przez poszczególne atomy będą interferować ze
sobą. Warunkiem wzmocnienia fal jest to, aby różnica dróg optycznych była równa
wielokrotności długości fali.
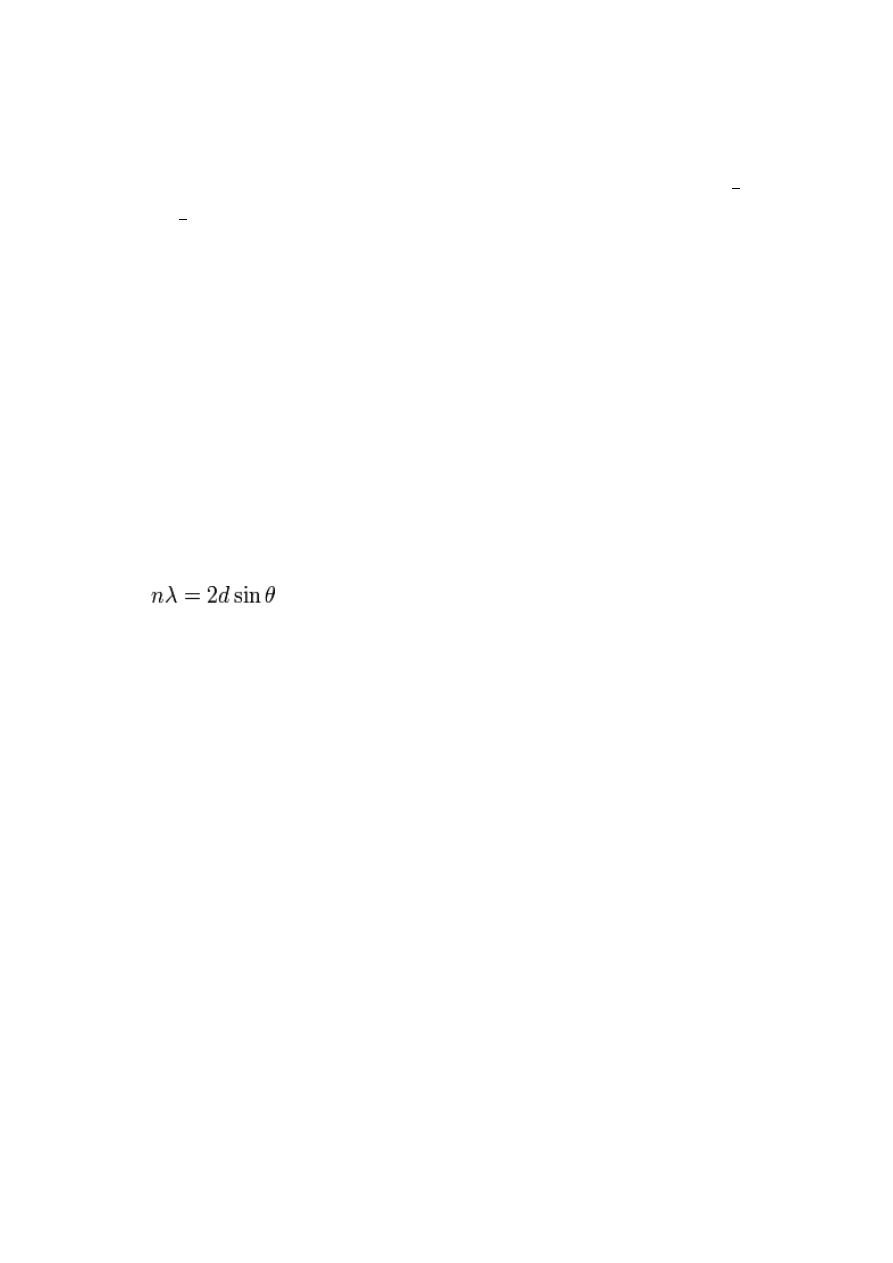
Prawo Bragga Prawo to dotyczy tzw. dyfrakcji Bragga. Kiedy promieniowanie rentgenowskie
pada na kryształ, na każdym jego atomie dochodzi do dyfrakcji. Warunek Bragga zakłada
odbicie od
płaszczyzn, na których układają się atomy kryształu.
Zjawi
sko to można zaobserwować dla fal o długości porównywalnych z odległością miedzy
płaszczyznami międzyatomowymi, czyli d<0,1nm. Np. dla promieniowania rentgenowskiego
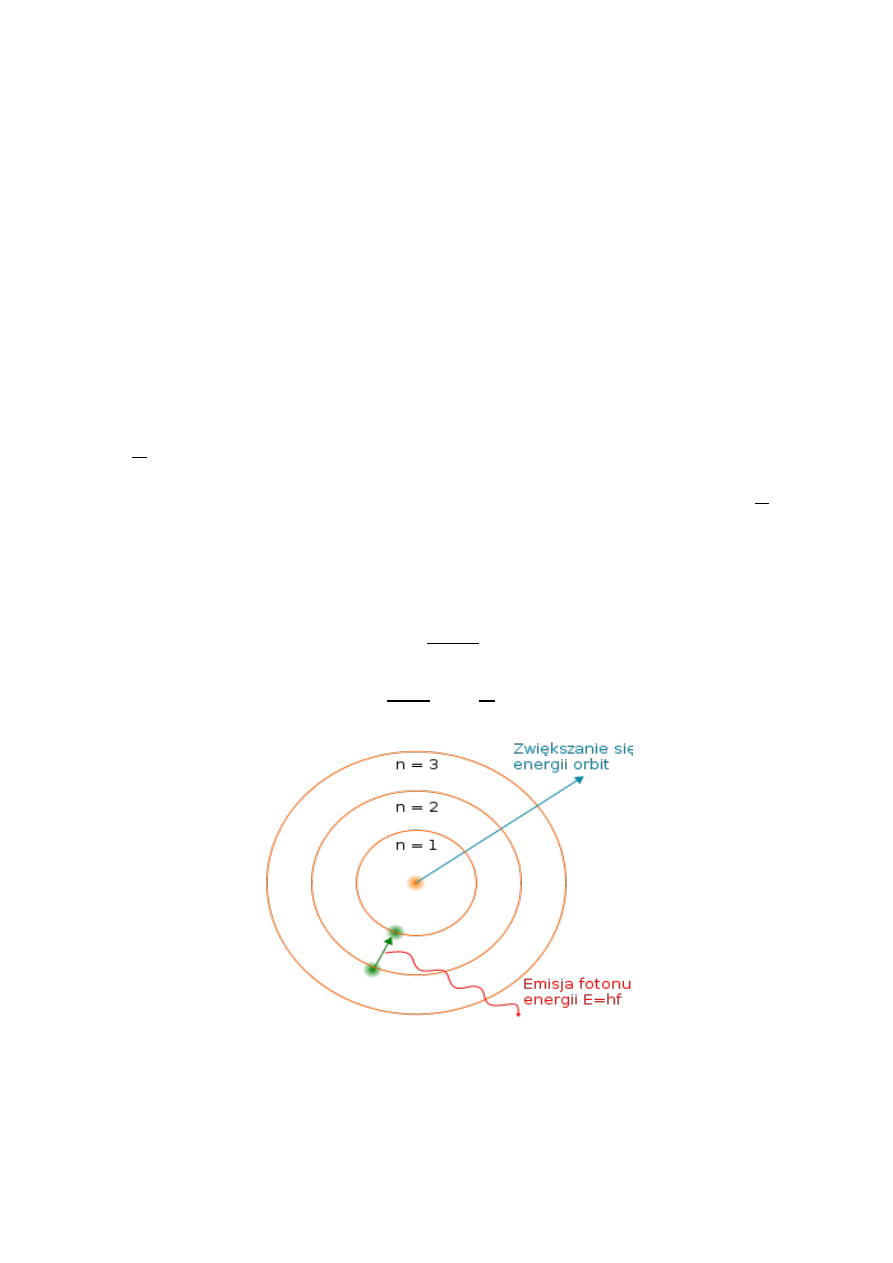
35. Model atomu Bohra:
Założenia Bohra:
a)
atom wodoru może znajdować się jedynie w ściśle określonych stanach, w których nie
promieniuje energii;
b)
warunkiem wyprowadzenia energii jest przejście atomu ze stanu o energii wyższej do
energii niższej, co opisuje równanie:
hv=E
k
-E
i
gdzie: h -
stała Plancka, E
n
i E
l
energie układu w obu stanach stacjonarnych.
Atomy wodoru Bohra:
Wokół jądra, które zajmuje niezwykle małą jego część, po orbitach kołowych porusza się
elektron, który jest przyciągany przez jądro siłami elektrostatycznymi. Bohr przyjął regułę, że
moment pędu może przyjmować wartości skwantowane:
l = n
, n = 1, 2, 3, …
Promień orbity rośnie jak n
2
, a energia całkowita maleje, co do wartości bezwzględnej jak
;
promień atomu Bohra i energię można obliczyć przyrównując siły elektrostatyczne do siły
dośrodkowej. Elektron krąży po orbitach stabilnych, nieemitując promieniowania.
Promieniowanie pojawia się dopiero przy zmianie orbity. Częstotliwość emitowanego
promieniowania jest równa
:
v=
siła elektrostatyczna
siła dośrodkowa

36. S
tan elektronu w atomie określony przez 4 liczby kwantowe i zakaz
Pauliego. Budowa
atomów wieloelektronowych
a) powłoka elektronowa (wokół danego atomu) – zbiór orbitali atomowych mających tę samą
główną liczbę kwantową n. Liczba stanów kwantowych określa wzór: 2n
2
b)
pod powłoka elektronowa – zbiór stanów kwantowych o tych samych wartościach n i l
liczba stanów kwantowych dla l: k+2
l
decyduje o kształcie orbitalu
c) poziom orbitalny
– zbiór stanów kwantowych o tych samych liczbach n, l i m
Mag
netyczna liczba kwantowa określa ułożenie w przestrzeni, a liczba (2l+1) wartości
całkowitych (od -l do +l)
d) spin-
czyli własny moment pędu cząstek elementarnych, także jąder atomowych
e) rzut spinu
– to kierunek wymuszony przez pole elektryczne lub magnetyczne, może
przybierać 2 różne orientacje przestrzenne bez względu na pozostałe wartości liczb
kwantowych. Magnetyczna spinowa liczba kwantowa przybiera wartości +/-
Zakaz Pauliego: w atomie stan określony przez 4 liczby kwantowe może być zajęty tylko przez
jeden elektron. W atomie nie mogą istnieć elektrony o takich samych liczbach kwantowych.
Zasada nieokreśloności Heisenberga: nie da się jednoznacznie określić położenia i pędu
elektronu, zawsze obliczymy go z błędem.
Reguła Hunda: liczba niesparowanych elektronów musi być jak największa.
Na elektron wieloelektrodowy działa siła elektrostatycznego przyciągania przez jądro o
ładunku +2e i (2-1) e sił elektrostatycznego odpychania przez inne elektrony. Każdy
pierwiastek ma charakterystyczną konfigurację w stanie podstawowym, w stanie wzbudzonym
nie działają wszystkie reguły zapełniania powłok, lecz musi być zakaz Pauliego i reguła
Hunda.
37.Własności magnetyczne materiałów: diamagnetyki, paramagnetyki
(prawo Curie), ferromagnetyki (temperatura Curie, domeny magnetyczne,
pętla histerezy).
W każdym materiale nośnikami magnetycznymi są elektrony i jądra atomów. Większość
substancji występujących w ilościach makroskopijnych nie wskazuje własności
magnetycznych, dopiero pod
wpływem zewnętrznego pola magnetycznego ujawniają się w
nich te
własności ciała silnie przyciągane przez magnez nazywamy FERROMAGNETYKAMI,
ciało słabo przyciągane przez magnez nazywamy PARAMAGNETYKAMI np. aluminium i
szereg soli. Reszta metali i wszystkie niemetale są DIAMAGNETYKAMI, czyli ciałami słabo
odpychanymi przez
magnez. Związek między magnetyzacją I, a zewnętrznym polem
magnetycznym H; I=XH,
X
–podatność magnetyczna,
Diamagnetyzm
– zjawisko polegające na indukcji w ciele znajdującym się w zewnętrznym
pola przeciwnego, osłabiającego działanie zewnętrznego pola. Zjawisko
odwrotne do diamagnetyzmu to paramagnetyzm.
Należy jednak zaznaczyć, że
paramagnetyzm jest zjawiskiem "odwrotnym" tylko w sensie makroskopowej obserwacji
zachowania się substancji w polu magnetycznym (diamagnetyk jest wypychany z pola
magnetycznego, a paramagnetyk
– wciągany). Stoją za tymi zachowaniami jednak całkowicie
inne zjawiska fizyczne: o di
amagnetyku czytaj niżej, a w paramagnetyku porządkują się
momenty magnetyczne elektronów.
Przyczyną diamagnetyzmu jest fakt, że zewnętrzne pole magnetyczne zmienia tor elektronów
na orbitach (jakby indukuje w układzie prąd elektryczny), który powoduje powstanie pola
magnetycznego skierowanego p
rzeciwnie do pola zewnętrznego.
Diamagnetyzm występuje we wszystkich substancjach, ale zwykle jest maskowany przez
silniejszy pa
ramagnetyzm. Wyjątkiem są przeważnie związki chemiczne posiadające wiązania
Diamagnetyki samorzutnie nie wykazują właściwości magnetycznych - nie są przyciągane
przez magnes. Umieszczenie dimagnetyka
w zewnętrznym polu magnetycznym powoduje
powstanie w tym materiale pola magnetycznego skierowanego przeciwnie. Dla tych ciał
względna przenikalność magnetyczna μ ośrodka jest nieco mniejsza od jedności
(diamagnetyki nieznacznie osłabiają pole magnetyczne). Do diamagnetyków zalicza się: gazy
szlachetne, prawie wszystkie metale i metaloidy
niewykazujące własności para- lub
ferromagnetycznych (np: bizmut, krzem, cynk, magnez,
złoto, miedź) a także fosfor, grafit,
oraz wiele związków chemicznych. Diamagnetyczne są też DNA i wiele białek.
Paramagnetyzm -
zjawisko magnesowania się makroskopowego ciała w zewnętrznym polu
magnetyczn
ym w kierunku zgodnym z kierunkiem pola zewnętrznego. Substancja wykazująca
takie własności to paramagnetyk, jest on przyciągany przez magnes, jednak znacznie słabiej
niż ferromagnetyk. W niezbyt niskich temperaturach oraz dla niezbyt silnych pól
magnetycznych paramagnetyki wykazują liniową zależność namagnesowania od pola
zewnętrznego, co wyraża wzór:
gdzie:
M - namagnesowanie (moment magnetyczny
jednostki objętości substancji)
χ - objętościowa podatność magnetyczna
W niskich temperaturach lub dla bardzo silny
ch pól magnetycznych namagnesowanie traci
liniową zależność od pola zewnętrznego i wykazuje nasycenie.
Podatność magnetyczna zależy od temperatury, zjawisko to ujmuje prawo Curie. Niektóre
paramagnetyki w temperaturach niższych od pewnej charakterystycznej dla każdej substancji
wartości, nazywanej punktem Curie, stają się ferromagnetykami.
Przyczyną paramagnetyzmu jest porządkowanie się spinów elektronów ciała zgodnie z liniami
zewnętrznego pola magnetycznego, uporządkowaniu przeciwdziałają drgania cieplne
cząsteczek. W niskich temperaturach lub w silnych polach magnetycznych dochodzi do
uporządkowania niemal wszystkich dipoli magnetycznych elektronów w wyniku, czego
dochodzi do nasycenia. Właściwości paramagnetyczne posiadają substancje o
niesparowanych elektronach.
Paramagnetyki mają przenikalność magnetyczną μ niewiele większą od jedności. Dla
ferromagnetyków μ jest wielokrotnie większe od 1.
Przykłady paramagnetyków:
- tlen O
2
- aluminium
- S
ód
- hemoglobina krwi
- platyna Pt
- tlenek azotu (II) NO
Ferromagnetyzm
– zjawisko, w którym materia wykazuje własne, spontaniczne
. Jest jedną z najsilniejszych postaci magnetyzmu i jest odpowiedzialny za
większość magnetycznych zachowań spotykanych w życiu codziennym. Razem z
ferrimagnetyzmem
jest podstawą istnienia wszystkich magnesów trwałych (jak i zauważalnego
przyciągania innych ferromagnetycznych metali przez magnesy trwałe).
Temperatura Curie (oznaczana T
C
) - temperatura
, powyżej której ferromagnetyk gwałtownie
traci swoje właściwości magnetyczne i staje się paramagnetykiem, zjawisko to wynika ze
zmiany fazy
ciała stałego. Nazwa pochodzi od nazwiska francuskiego fizyka Piotra Curie,
męża Marii Skłodowskiej-Curie.
W temperaturze niższej od temperatury Curie dipole magnetyczne atomów lub cząsteczek
ustawiane są przez wiązania chemiczne w jednym kierunku tworząc domeny
ferromagnetyczne. W temperaturze powyżej temperatury Curie drgania cieplne sieci
krystalicznej niszczą ustawienia dipoli magnetycznych, dipole wykonują drgania.
Poprzez analogię do ferromagnetyków, w ferroplastykach temperatura zaniku własności
ferroplastycznych też jest nazywana temperaturą Curie.
Temperatury Curie wybranych substancji w kelwinach
Substancja Temperatura (K)
Fe
1043
Co
1388
Ni
627
Gd
292
Dy
88
MnAs
318
MnBi
670
Substancja Temperatura (K)
MnOFe
2
O
3
573
FeOFe
2
O
3
858
NiOFe
2
O
3
858
CuOFe
2
O
3
728
MgOFe
2
O
3
713
Y
3
Fe
5
O
12
560
CrO
2
386
Substancja Temperatura (K)
EuS
16.5
CrBr
3
37
Au
2
MnAl
200
Cu
2
MnAl
630
Cu
2
MnIn
500
GdCl
3
2,2
Fe
2
B
1015
38. Budowa jądra atomowego i izotopy, promieniotwórczość naturalna i
rodzaje promi
eniowania jądrowego.
J
ądro atomowe składa się z dodatnio naładowanych protonów i cząstek obojętnych. Obydwa
te rodzaje cząsteczek nazywamy nukleonami. Każda z tych cząstek jest wielokrotnie większa
od masy elektronu. Powoduje
to, że prawie cala masa okupione jest w jądrze. Kształt jądra
jest nieznany, ale
najczęściej przyjmuje się ze jest on kulisty. Protony i neutrony składają się z
kwantów. Kwanty wewnątrz tych cząstek oddziałują ze sobą. Oprócz tego kwanty mogą
sklejać się z kwantami innego protonu lub neutronu, co utrzymuje jądro w całości. Liczbę
nukleonów oznaczamy A i nazywamy liczbą masową. Liczbę protonów, elektronów
oznaczamy Z
i nazywamy liczbą atomową.
Izotopy
– mają identyczną liczbę porządkową Z, a różnią masą molową. Większość
pierwiastków składa się mieszaniny izotopów wodór
H deuter 0=
H tryt T=
H
Izobary-
mają identyczne liczby masowe A, a rożne liczby atomowe Z.
Promieniotwórczość naturalna pochodzi wyłącznie ze źródeł naturalnych, czyli z pierwiastków
radioaktywny
ch obecnych w glebie, skałach, powietrzu i wodzie. Niektóre pierwiastki o dużej
liczbie Z samorzutnie wysyłają niewidzialne promienie. Ich promieniowanie składa się z trzech
rodzaji promieni:
-promieniowanie alfa-
są strumieniami jąder
He
-promieniowanie beta-
są elektronami poruszającymi się z prędkościami bliskimi to prędkości
światła
-promieniowanie gamma-
są przenikliwym promieniowaniem elektromagnetycznym, którego
długość fal w próżni leżą w zakresie 0,4* 10
-10
- 0,0005* 10
-10.
. Energią promieni alfa i beta
wyznaczamy z odchylenia toru tych cząstek polu elektrycznym i magnetycznym o znanym
natężeniu. Promieniowanie ciał radio aktywnych nie zależy od jakichkolwiek zewnętrznych
czynników fizycznych lub chemicznych. Nie da się tego ani przyspieszyć ani spowolnić.
Rozpad α: jądro traci dwa protony i dwa neutrony
X=
Y +
He
Rozpad β: a) βminus :
X =
Y +
e b) βplus :
X =
Y +
e
Rozpad gamma: jądro w stanie wzbudzonym może powrócić do stanu o niższej energii
X =
X + hr

39. Prawo rozpadu, czas połowicznego zaniku i średni czas życia jądra.
Szeregi promieniotwórcze.
Głosi, że prawdopodobieństwo rozpadu cząstek tworzące substancje jest dla każdej z nich
jednakowe i niezależne oraz nie zmienia się w czasie trwania procesu rozpadu, to ubytek
masy substancji w niewielkim odcinku czasu można wyrazić wzorem:
dm = -
ʎmdt
m
– masa substancji ulegającej rozpadowi
ʎ - stała rozpadu charakterystyczna dla danego izotopu, minus oznacza ubytek jąder, które
jeszcze nie rozpadły się
Średni czas życia jąder określa się ze wzoru t, = 1 / czyli jest to odwrotność stałej rozpadu.
Zarówno stała jak i średni czas życia zależą jedynie od indywidualnych właściwości jądra a
przede wszystkim od liczby masowej i atomowej.
Średni czas życia to okres, w którym ilość pierwiastka zmaleje do N
0
/e
N
0
– początkowa liczba jąder e - stała matematyczna
Zamiast stałej rozpadu częściej używa się okresu połowicznego rozpadu jest to czas w ciągu,
którego rozpadnie się połowa początkowej ilości jąder.
Szeregi promieniotwórcze – to pierwiastki powstające w procesie rozpadu
promieniotwórczego.
Naturalne pierwiastki promieniotwórcze tworzą 4 szeregi, które rozpoczynają się od uranu,
to
ru, aktynu i neptunu. Do naszych czasów dotrwały tylko te szeregi promieniotwórcze, których
okres połowicznego zaniku jest porównywalny z wiekiem ziemi.
Każdy szereg kończy się nie promieniotwórczym izotopem ołowiu.
Równanie równowagi promieniotwórczej N
1
ʎ = N
2
ʎ
40. Reakcje jądrowe, energia jądrowa, reaktory jądrowe.
Reakcje jądrowe – niektóre z nich są wynikiem działań laboratoryjnych, inne dokonały się
podczas powstawania
części wszechświata.( dostarczają wiele informacji: budowa jądra
atomu, pochodzenie
wszechświata, stanach energetycznych). Jądra nietrwałe nazywamy
promieniotwórczymi a rozpady są
promieniowaniem alfa-
Promieniowaniem beta
– elektrony
Promieniowaniem gama
– Fotony
Energia jądrowa – wydziela się podczas przemian jądrowych, uwalnianie się jej jest związane
z różnicami energii wiązania poszczególnych jąder atomowych.
Reakcja syntezy
jądrowej jest głównym źródłem energii emitowanej przez ciało niebieskie.
Jest źródłem promieniowania Słońca.
Reaktor jądrowy- urządzenie, w którym przeprowadza się z kontrolowaną szybkością reakcje
rozszczepiania jąder atomowych. Reakcja rozszczepiania jader atomowych ma przebieg
lawinowy. W celu kontrolowania
szybkości reakcji tak by przebiegała z jednakowa prędkością
wprowadza
się do reaktora substancje pochłaniające wektory (np. bar), umieszczamy je w
prętach regulacyjnych.
Podział według reakcji jądrowych:
Rozszczepianie jądra atomu
Synteza termojądrowa
Rozpad promieniotwórczy
Podział ze wg przeznaczania
Energetyczne
Badawcze
Napędowe
Militarne
Podział ze wg chłodzenia:
Wodne
Gazowe
Solne
Ciężkowodne
Prędkie
Podział ze wg na generacje:
Pierwszej
– prototypowe
Drugiej
Trzeciej
Czwartej
– najnowsze (jeszcze w fazie badań)
Budowa reaktora:
Rdzeń
Reflektor neutronów
Osłony biologiczne
Rdzeń zawiera pręty paliwowe, regulacyjne, bezpieczeństwa, moderator, kanały chłodzenia i
badawcze
Wyszukiwarka
Podobne podstrony:
15 przykladowy egzamin z fizyki
opracowanie egzamin fizyki v1 0
EGZAMIN Z FIZYKI
Opracowanie na egzamin z fizyki, semestr I(1)
Egzamin z fizyki Elektrotechnika sem I 2013 2014
test egzaminacyjny z fizyki 2
Egzamin z fizyki semestr 2
Egzamin z fizyki
Egzamin z fizyki 1 2A
Pytania do egzaminu z fizyki sem.1 teoria
Opracowanie zagadnień egzaminacyjnych z fizyki
Egzamin z fizyki teoretycznej 2005
TEST EGZAMINACYJNY Z FIZYKI, aaa, studia 22.10.2014, całe sttudia, cruzer
01-02-2004 Egzamin z fizyki, Mechanika i Budowa Maszyn PG, semestr1, Fizyka
Zagadnienia na egzamin z fizyki Elektrotechnika sem I - 2012-2013, Politechnika Poznańska, Elektrote
Egzamin z fizyki 0
Tematy egzaminacyjne z fizyki I, materiały, Fizyka
PYTANIA Z EGZAMINU Z FIZYKI
więcej podobnych podstron