Prof. Edmund Wittbrodt
Ruch kulisty bryły. Kinematyka
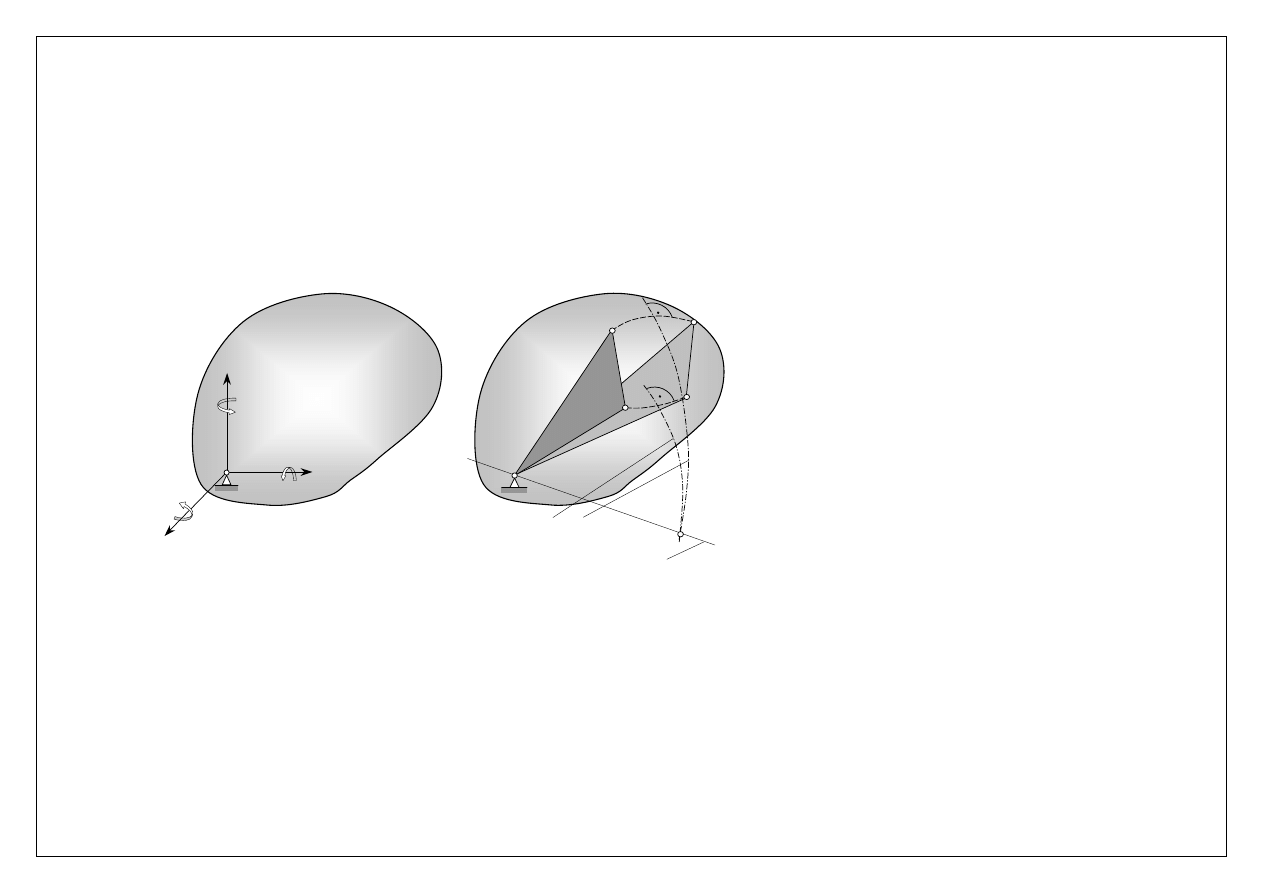
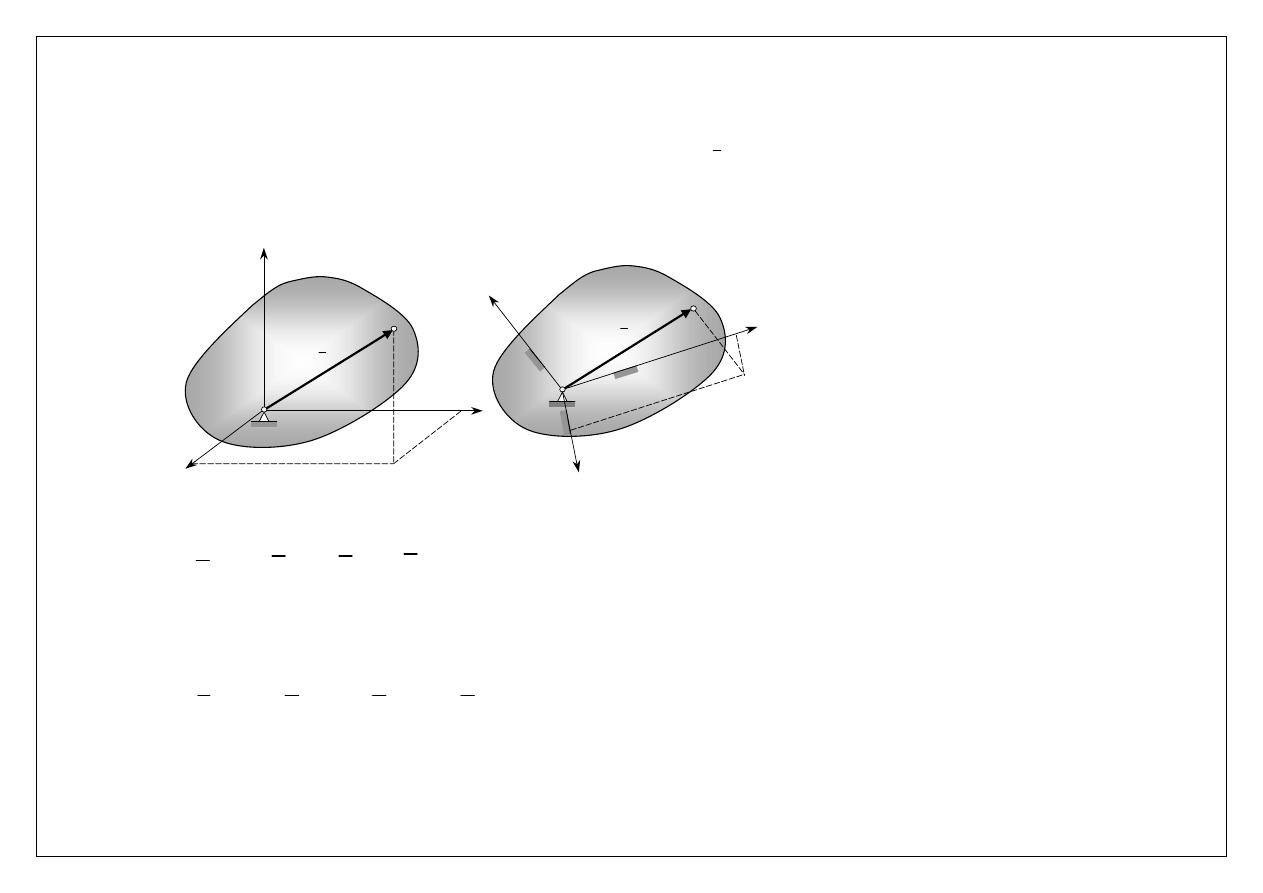
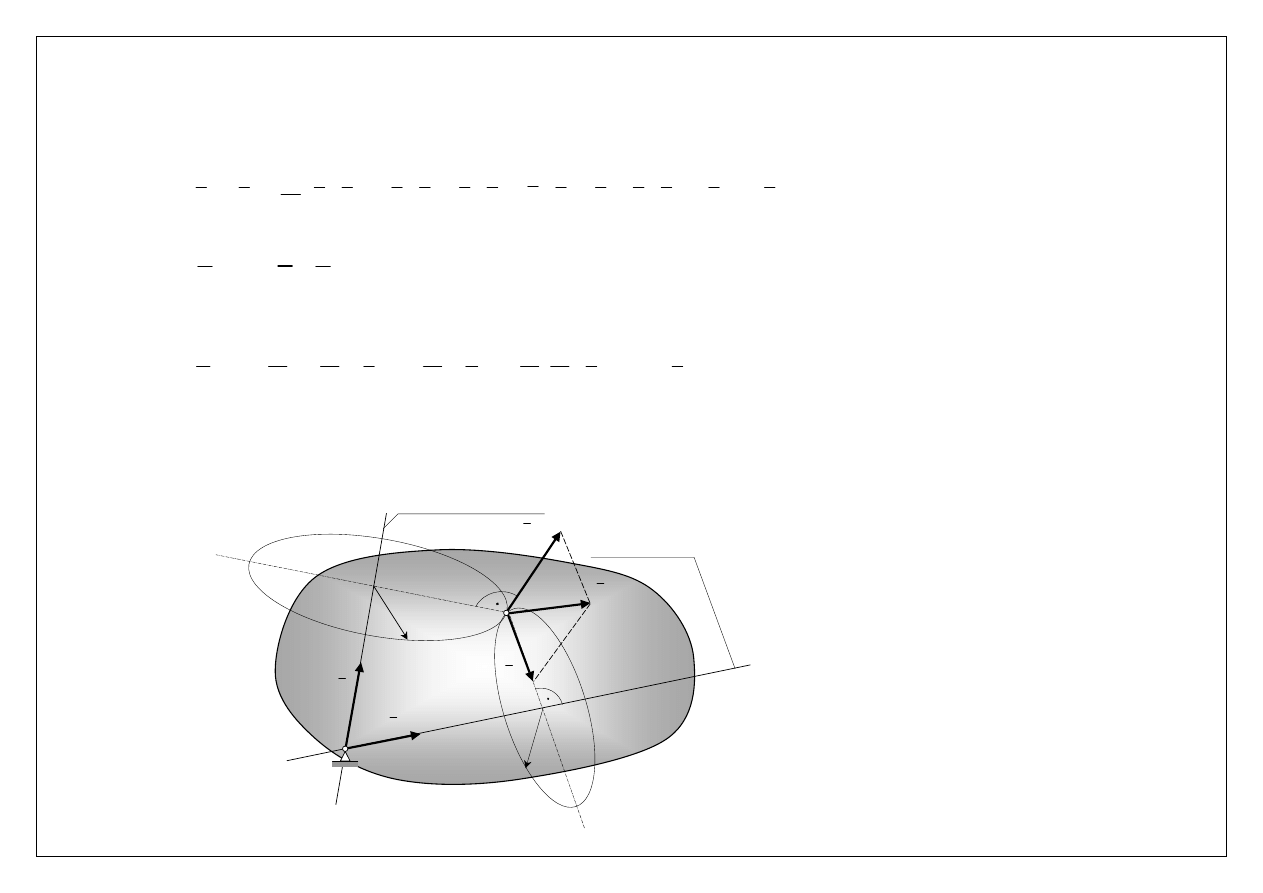
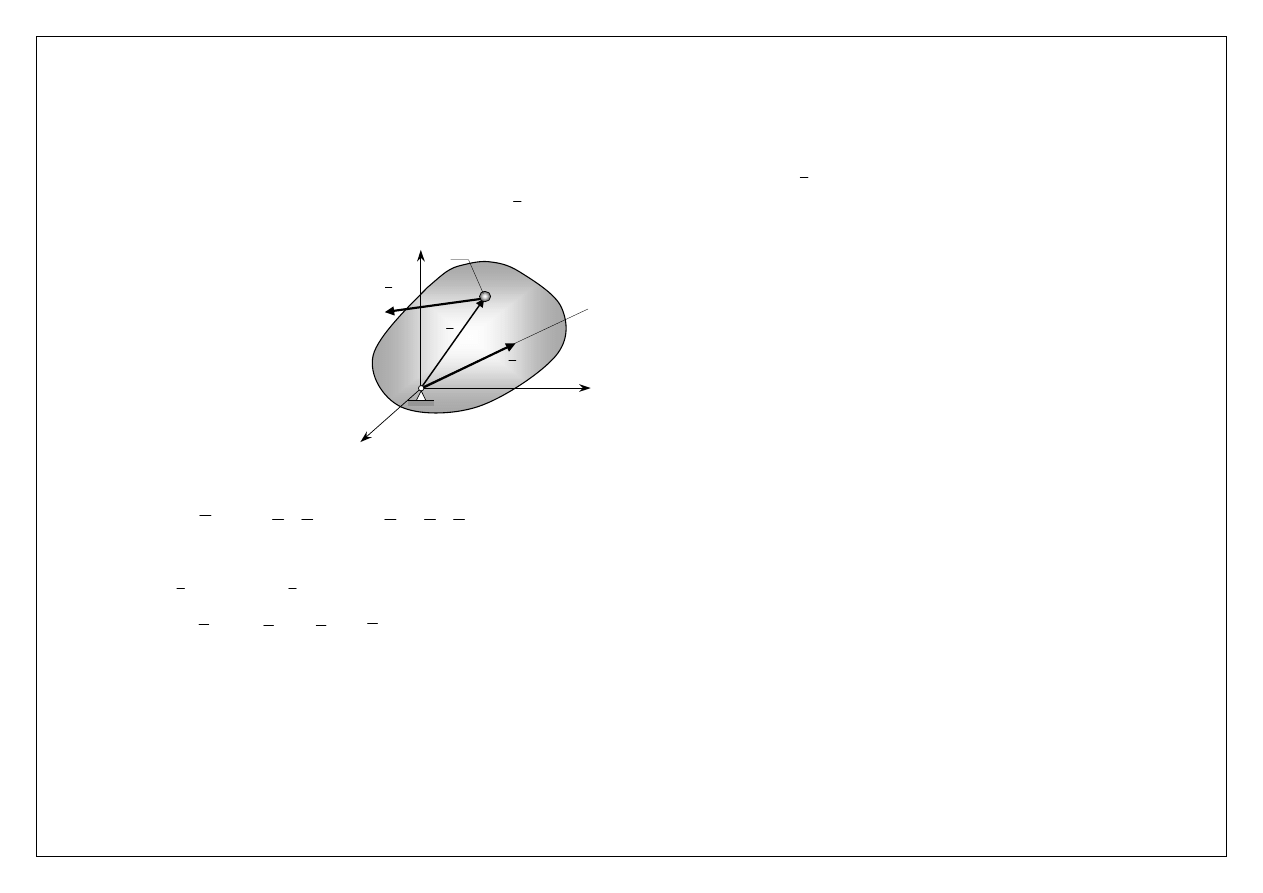
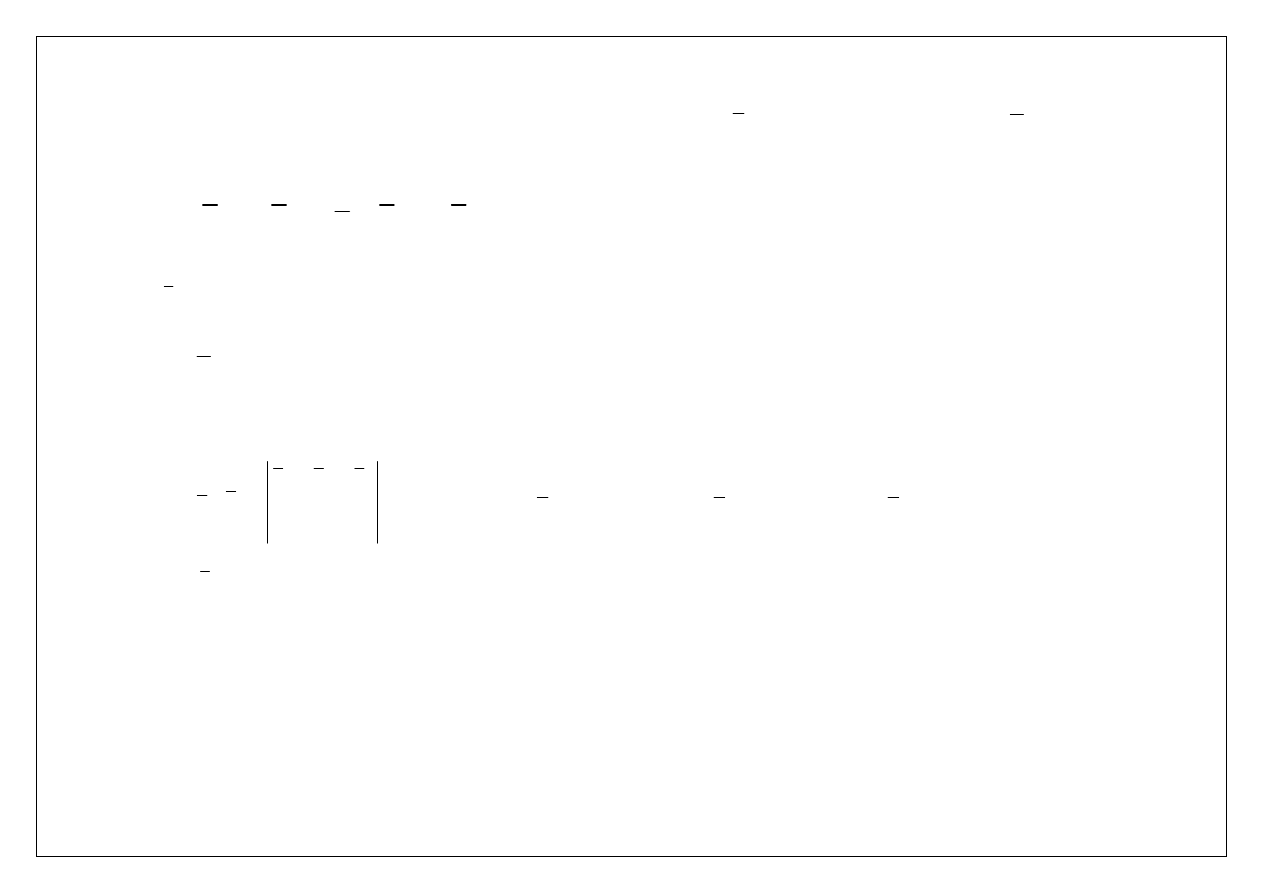
Ruchem kulistym nazywamy ruch, w czasie którego jeden z punktów bryły jest stale nieruchomy. Ruch kulisty jest obrotem
dookoła chwilowej osi obrotu (oś ta zmienia swoje położenie w czasie).
Ruch kulisty bryły: a) obrót wokół punktu, b) obrót dookoła chwilowej osi obrotu
Symetralne, le
żą
ce
na kołach du
ż
ych
A’
∆
OAB=
∆
OA’B’
O
1
Chwilowa
o
ś
obrotu
B’
A
B
O
b)
O
a)
y
x
z
ϕ
x
ϕ
y
ϕ
z
Prof. Edmund Wittbrodt
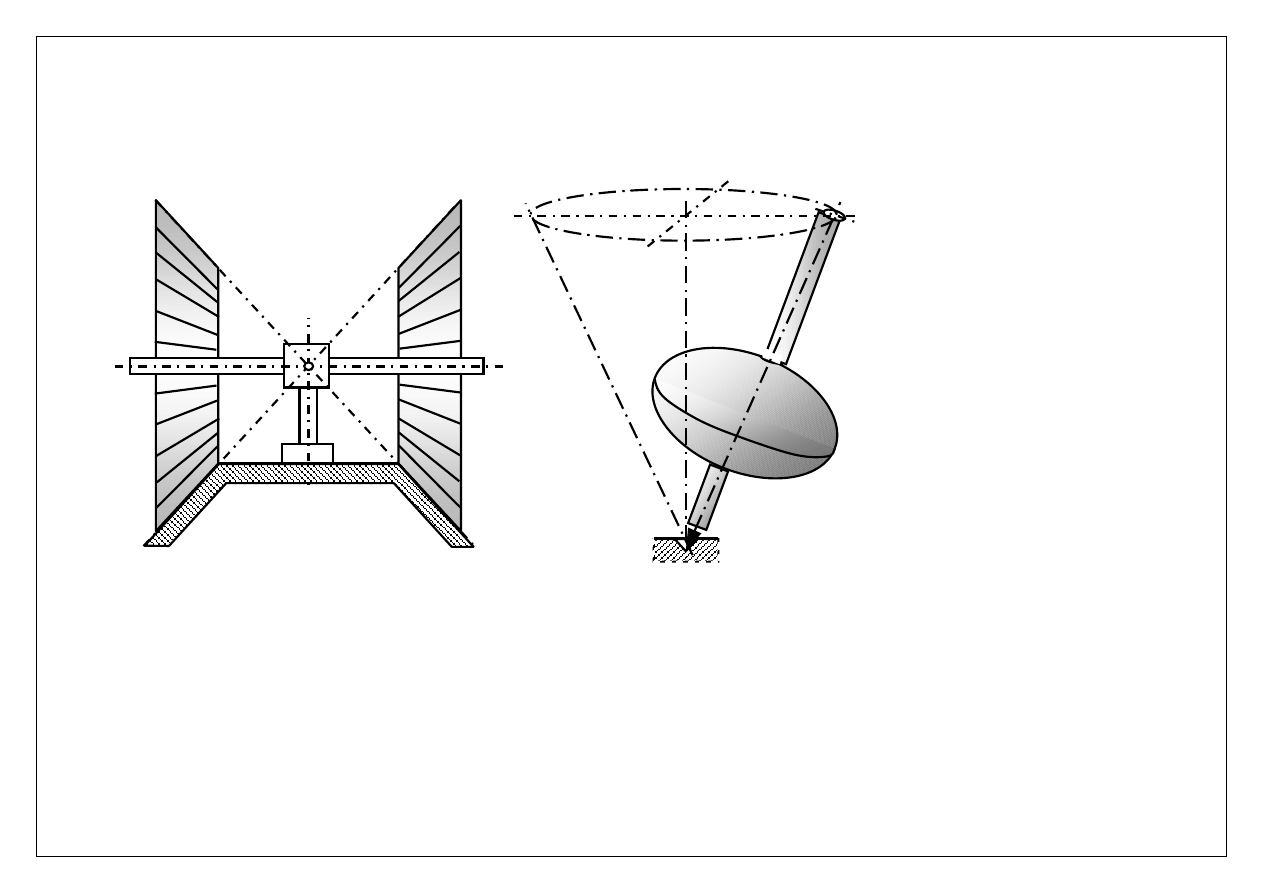
Przykłady brył w ruchu kulistym
Prof. Edmund Wittbrodt
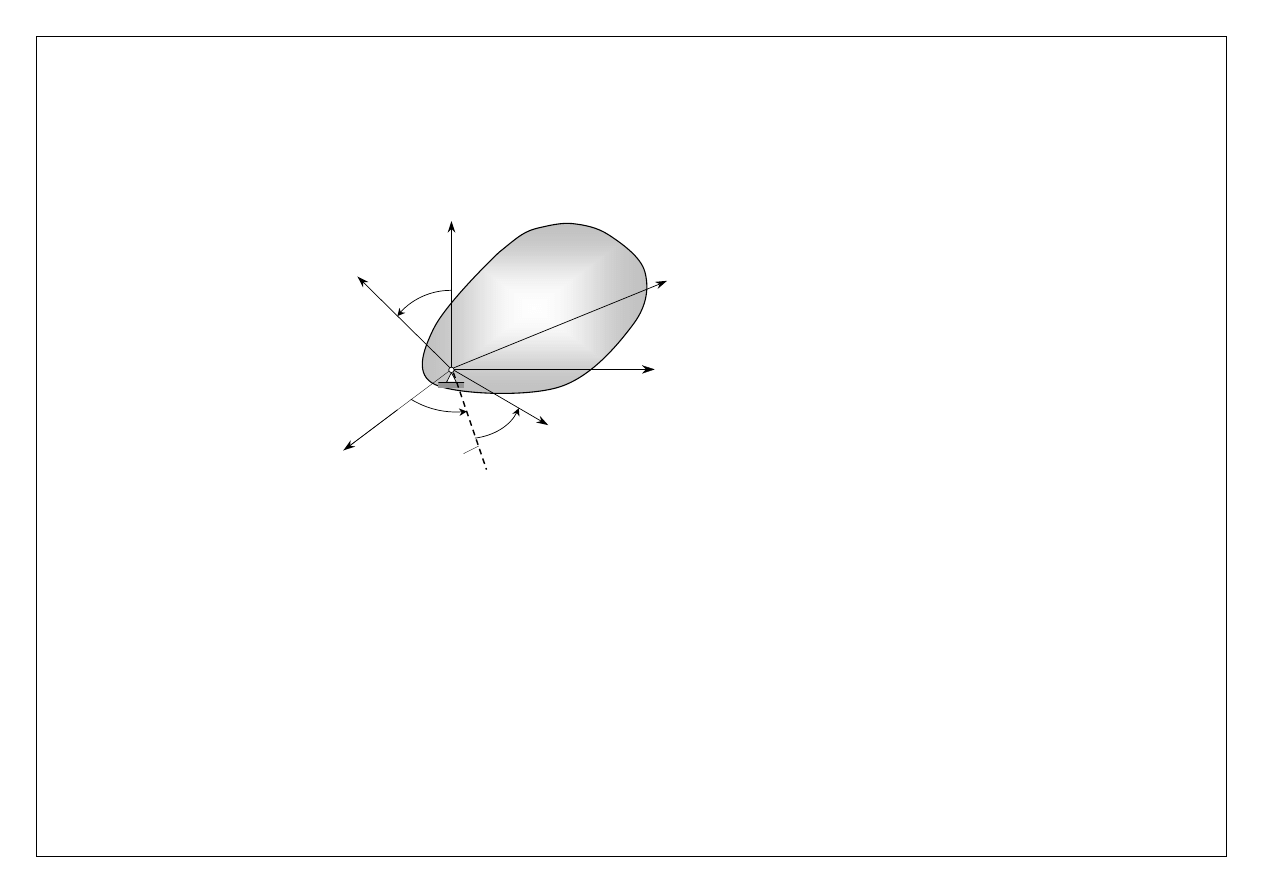
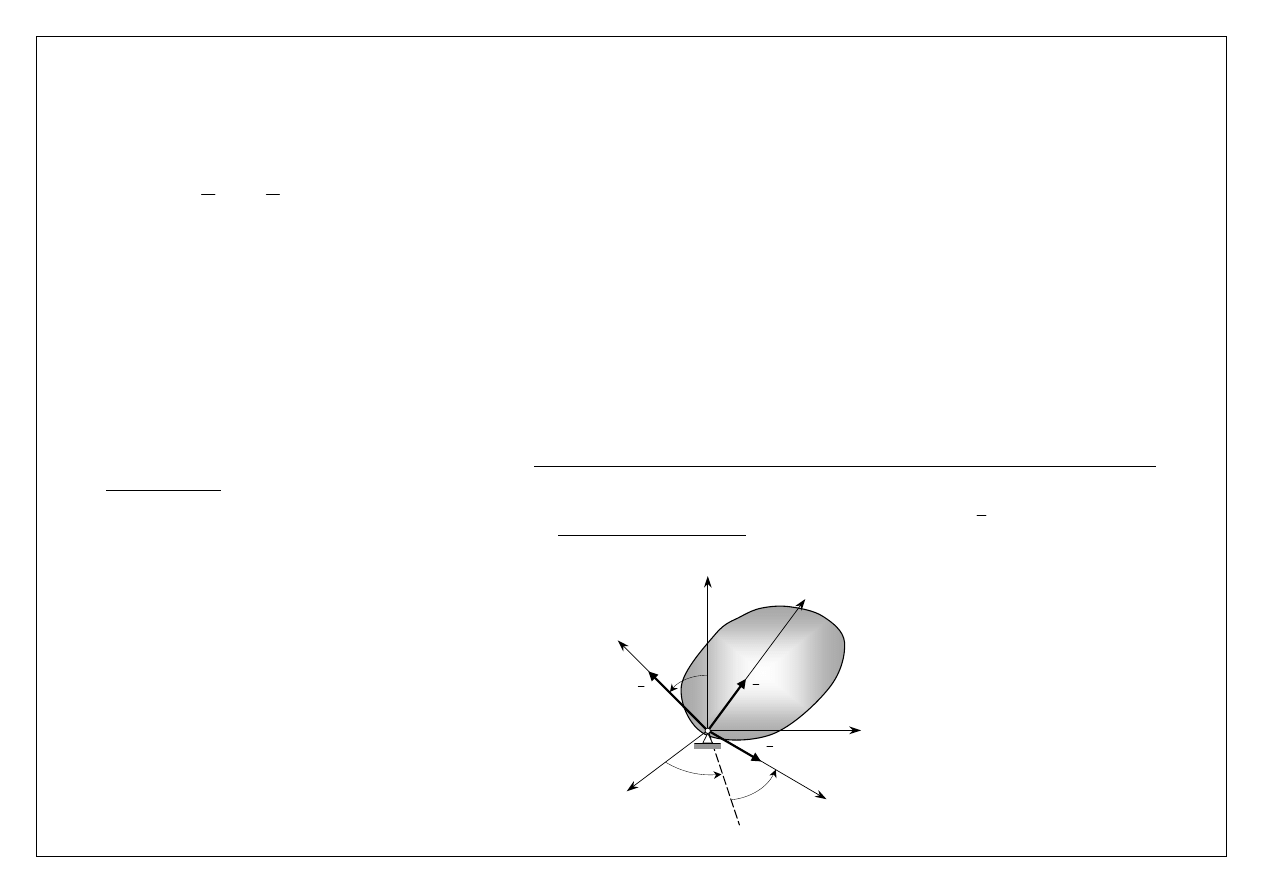
Położenie. Bryła, której jeden punkt jest unieruchomiony ma 3 stopnie swobody. Jej położenie jest opisane w sposób
jednoznaczny jedynie za pomocą kątów, zwanych
kątami Eulera
. Dla określenia tych kątów wprowadzamy układ
współrzędnych związanych z bryłą
ξ
,
η
,
ζ
.
Opis ruchu kulistego bryły za pomocą kątów Eulera
Wyobraźmy sobie, że początkowo osie układu nieruchomego x, y, z pokrywają się z osiami układu
ξ
,
η
,
ζ
. Następnie bryła
wykonuje obroty:
•
wokół osi nieruchomej
z
o kąt
ψ
(kąt
precesji
), po wykonaniu tego obrotu oś
ξ
znajdzie się na linii zwanej linią
węzłów
w
,
•
wokół osi
ξ
o kąt
θ
(kąt
nutacji
), ściśle wokół linii węzłów
w
,
•
wokół osi
ζ
o kąt
ϕ
(kąt
obrotu własnego
).
Kolejność „wykonywania” powyższych obrotów jest dowolna i nie ma ona wpływu na położenie końcowe bryły.
y
ξ
ψ
x
η
z
ζ
θ
ϕ
linia
w
ę
złów w
O
Prof. Edmund Wittbrodt
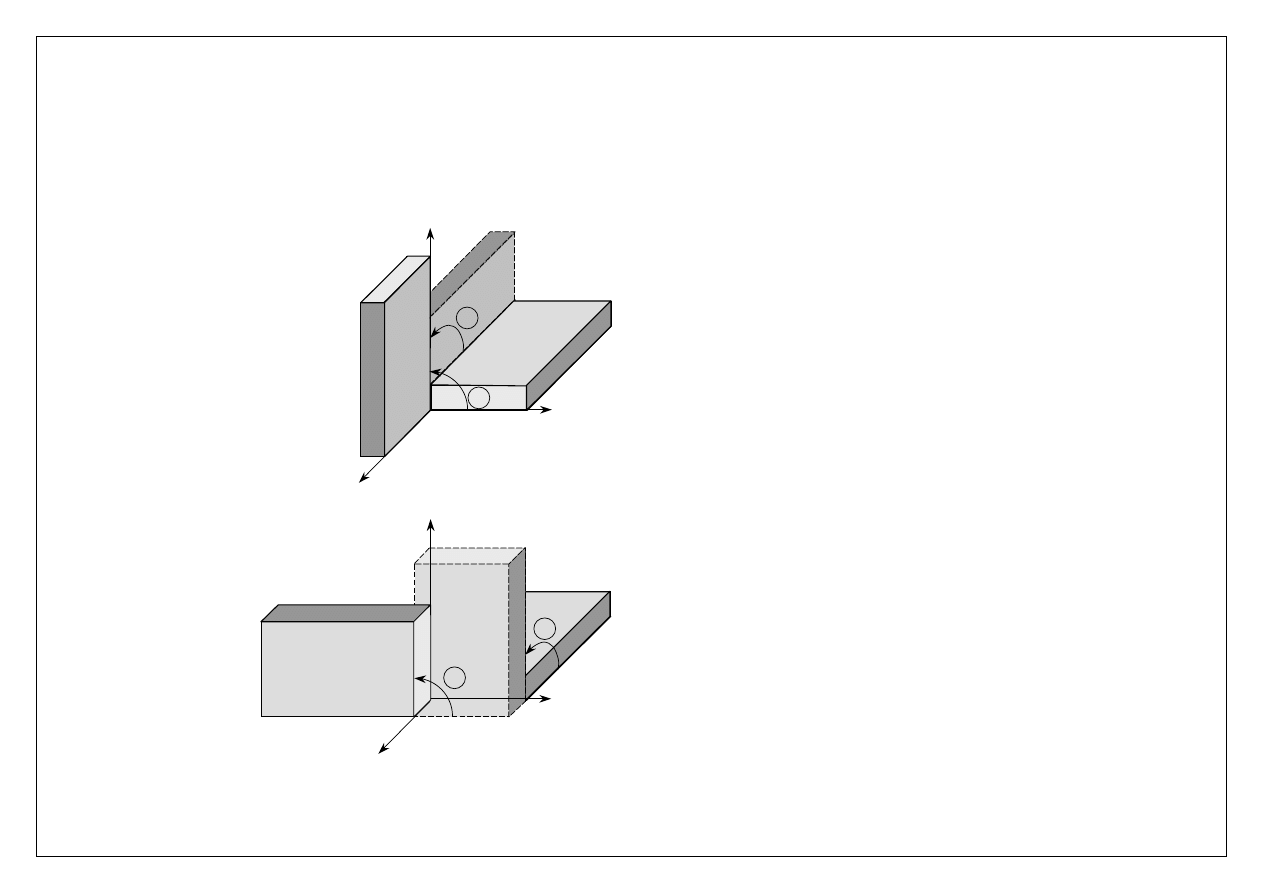
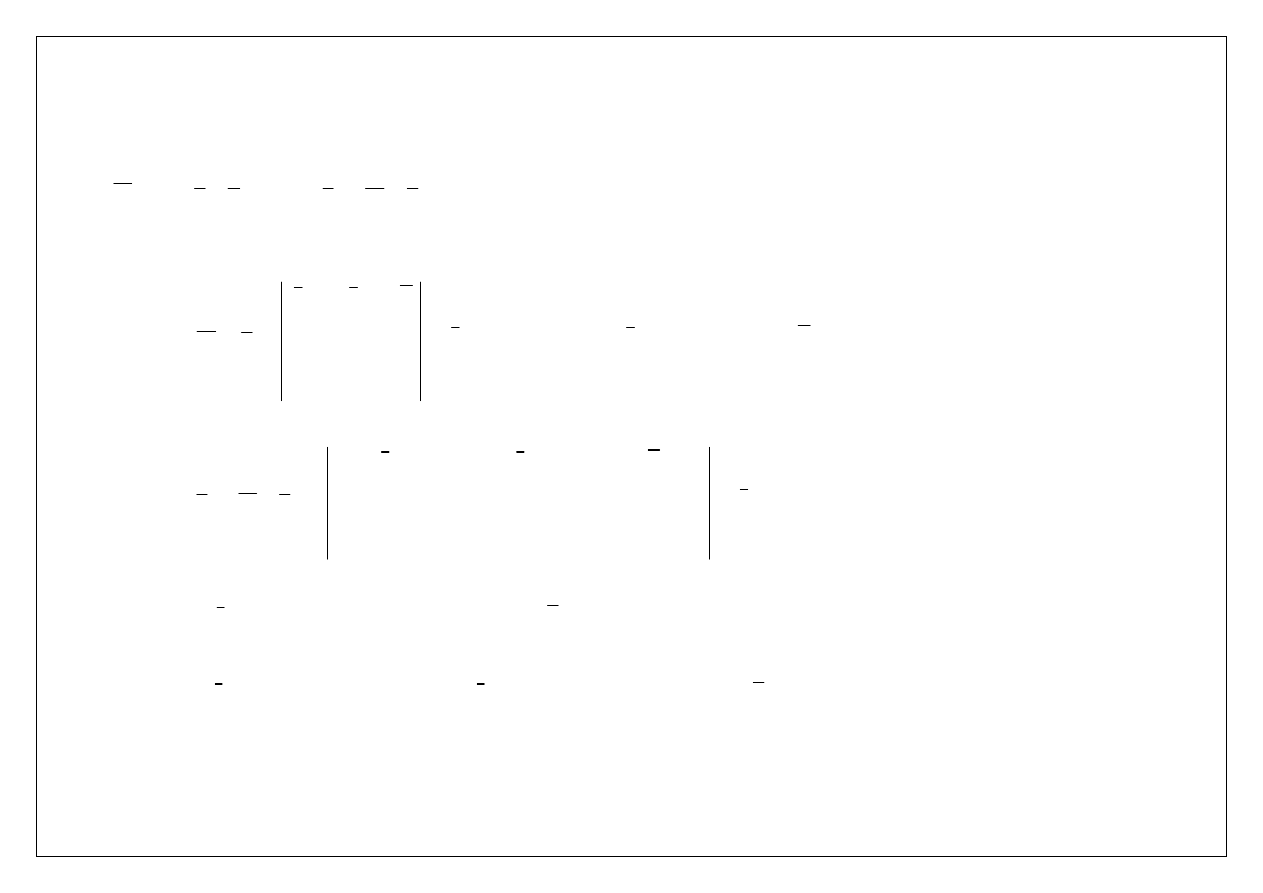
Gdybyśmy chcieli za współrzędne bryły przyjąć kąty będące obrotami wokół osi układu nieruchomego x, y, z, wówczas
kolejność wykonywania obrotów decydowałaby o położeniu końcowym bryły. Kąty
ϕ
x
,
ϕ
y
,
ϕ
z
nie opisują więc
jednoznacznie położenia bryły (można je przyjąć tylko dla małych obrotów).
Wpływ kolejności „wykonywania” obrotów bryły na położenie
końcowe: a) obroty w kolejności – wokół osi x potem y, b)
obroty w kolejności – wokół osi y potem x
Zatem kąty:
ψ
=
ψ
(t),
θ
=
θ
(t),
( )
t
ϕ ϕ
=
są współrzędnymi bryły w ruchu kulistym.
x
z
y
1
2
b)
x
z
y
1
2
a)
Prof. Edmund Wittbrodt
Położenie dowolnego punktu A bryły określamy za pomocą wektora
r
(o stałej długości), którego współrzędne możemy
podać w nieruchomym układzie osi x, y, z
Położenie punktu A bryły w ruchu kulistym:
a) w układzie nieruchomym x, y, z,
b) w układzie
ξ
,
η
,
ζ
związanym z bryłą
A
A
A
A
r
x i
y j
z k
=
+
+
lub w układzie związanym z bryłą
ξ
,
η
,
ζ
ζ
η
ξ
ζ
η
ξ
e
e
e
r
A
A
A
A
+
+
=
,
gdzie
ξ
A
,
η
A
,
ζ
A
są wielkościami stałymi.
z
A
x
y
A
O
x
A
y
z
A
r
A
a)
O
A
r
A
ξ
η
ζ
ζ
A
ξ
A
η
A
b)
Prof. Edmund Wittbrodt
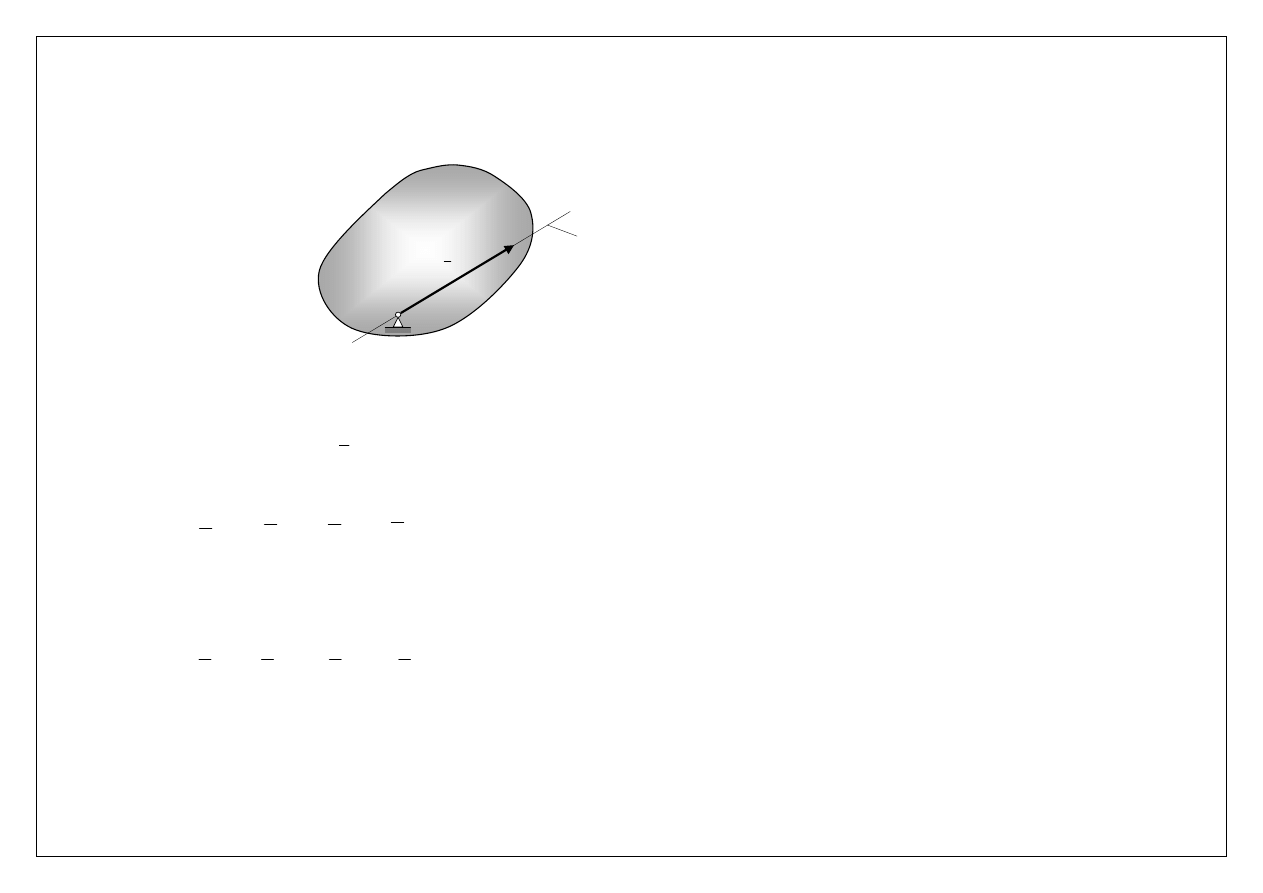
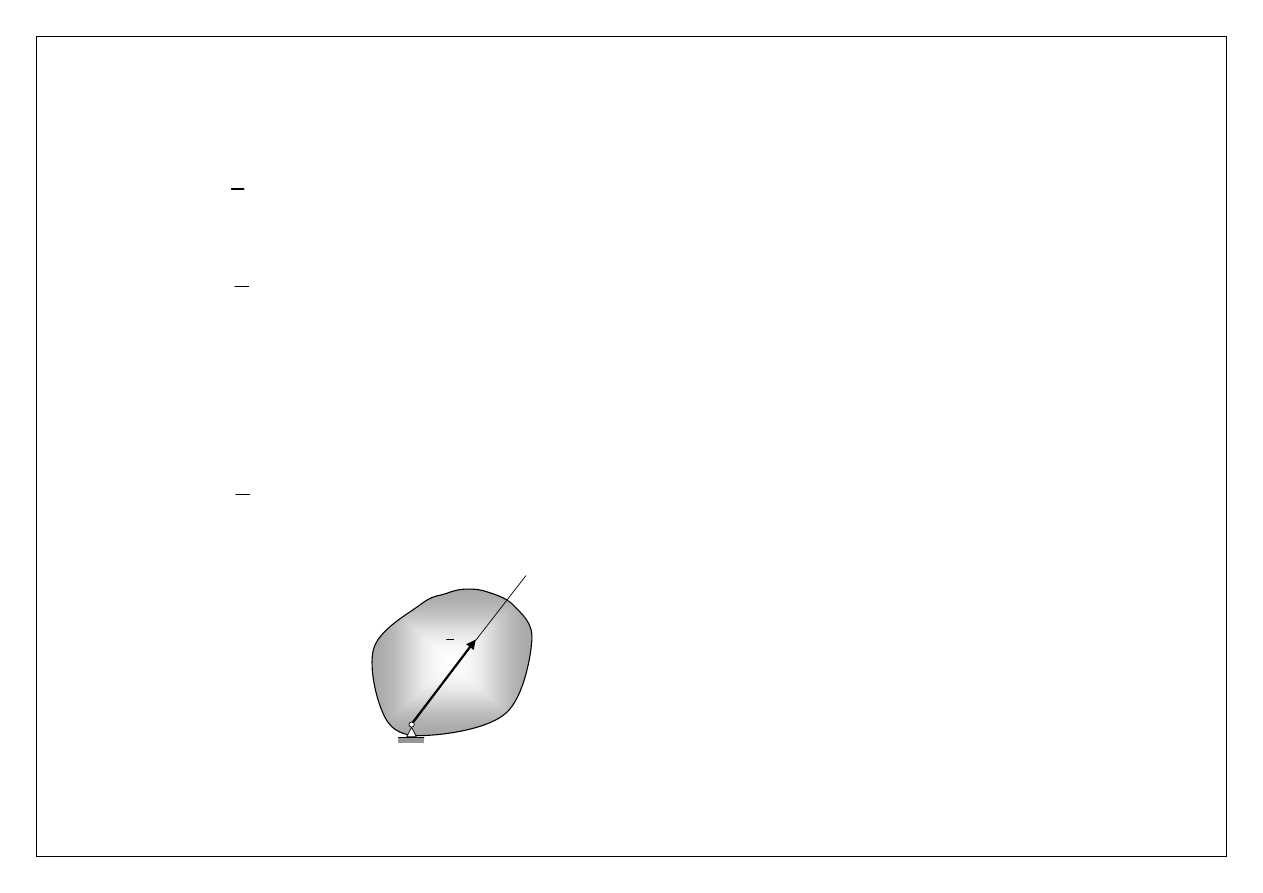
Prędkość. Ponieważ ruch kulisty jest obrotem wokół chwilowej osi obrotu, wektor prędkości kątowej leży na tej osi.
Chwilowa oś obrotu bryły w ruchu kulistym
Wektor prędkości kątowej
ω
możemy podać zarówno w nieruchomym układzie osi x, y, z
x
y
z
i
j
k
ω ω
ω
ω
=
+
+
,
jak i w układzie związanym z bryłą
e
e
e
ξ ξ
η η
ζ ζ
ω ω
ω
ω
=
+
+
.
0
chwilowa o
ś
obrotu
ω
Prof. Edmund Wittbrodt
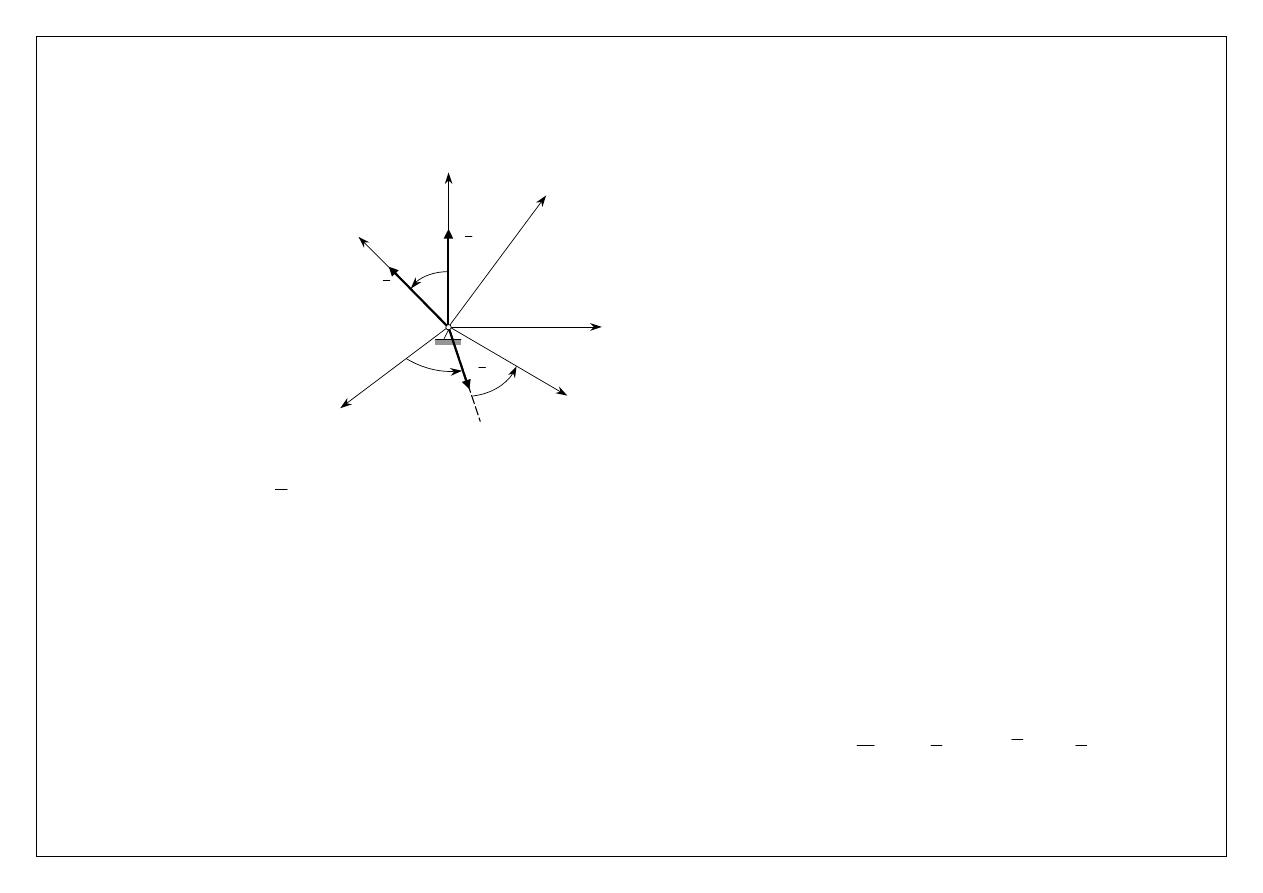
Znając prędkości:
ϕ
&
– obrotu własnego,
ψ
&
– precesji oraz
θ
&
– nutacji,
Wektory prędkości kątowych: obrotu własnego
ϕ
&
, precesji
ψ
&
i nutacji
θ
&
Składowe wektora
ω
, w układzie nieruchomym
z
y
x
,
,
oraz ruchomym
ξ
,
η
,
ζ
obliczamy z zależności:
⋅
−
=
=
θ
ψ
ϕ
θ
ψ
ψ
θ
ψ
ψ
θ
ω
ω
ω
ω
&
&
&
0
1
cos
sin
0
cos
sin
cos
0
sin
sin
z
y
x
.
⋅
−
=
=
θ
ψ
ϕ
θ
ϕ
ϕ
θ
ϕ
ϕ
θ
ω
ω
ω
ω
ζ
η
ξ
&
&
&
0
cos
1
sin
cos
sin
0
cos
sin
sin
0
natomiast:
ϕ
ω
ϕ
&
=
,
ψ
ω
ψ
&
=
,
θ
ω
θ
&
=
- prędkości zmian kątów Eulera.
Możemy też wektor prędkości kątowej bryły w ruchu kulistym przedstawić w postaci
w
e
k
e
⋅
+
⋅
+
⋅
=
θ
ψ
ϕ
ω
ζ
&
&
&
ϕ
y
ξ
ψ
x
η
z
ζ
O
ψ
&
ϕ
&
θ
&
θ
w
Prof. Edmund Wittbrodt
W celu znalezienia składowych prędkości kątowej w układzie x,y,z obliczamy poszczególne jej składowe sumując
algebraicznie odpowiednie składowe wektorów prędkości kątowych w układzie x’,y’,z’
z’
O
z
y
w
x
n
θθθθ
2
ϕ
′
=
ω
k
r
r
&
2
π ψ
−
ψ
1
ψ
=
ω
k
r
r
&
3
e
θ
=
r
r
&
w
ω
2
π
cos
ϕ
θ
&
sin sin
ϕ
θ ψ
&
sin cos
ϕ
θ
ψ
−
&
sin
ϕ
θ
&
Prof. Edmund Wittbrodt
Transformacja do układu nieruchomego:
x,y,z
k
⋅
=
ψ
ω
&
1
'
2
k
⋅
=
ϕ
ω
&
w
e
⋅
=
θ
ω
&
3
x
ω
0
ψ
θ
ϕ
sin
sin
⋅
⋅
&
ψ
θ
cos
⋅
&
y
ω
0
ψ
θ
ϕ
cos
sin
⋅
⋅
−
&
ψ
θ
sin
⋅
&
z
ω
ψ
&
θ
ϕ
cos
⋅
&
0
Transformacja do układu ruchomego:
ζ
η
ξ
,
,
k
⋅
=
ψ
ω
&
1
'
2
k
⋅
=
ϕ
ω
&
w
e
⋅
=
θ
ω
&
3
ξ
ω
ϕ
θ
ψ
sin
sin
⋅
⋅
&
0
ϕ
θ
cos
⋅
&
η
ω
ϕ
θ
ψ
cos
sin
⋅
⋅
&
0
ϕ
θ
sin
⋅
−
&
ζ
ω
θ
ψ
cos
⋅
&
ϕ
&
0
Prędkość liniową punktu A bryły, w układzie nieruchomym x, y, z, obliczamy z zależności
Prof. Edmund Wittbrodt
A
A
x
y
z
A
A
A
i
j
k
v
r
x
y
z
ω
ω
ω
ω
= × =
,
co stanowi wektor
A
Ax
Ay
Az
v
v
i
v
j
v k
=
+
+
,
gdzie:
Ax
y A
z
A
v
z
y
ω
ω
=
−
,
Ay
z A
x A
v
x
z
ω
ω
=
−
,
Az
x
A
y A
v
y
x
ω
ω
=
−
.
Natomiast wektor prędkości punktu A w układzie związanym z bryłą obliczamy
Prof. Edmund Wittbrodt
ξ
η
ζ
ξ
η
ζ
ω
ω
ω
ω
ξ
η
ζ
= × =
A
A
A
A
A
e
e
e
v
r
,
co zapisujemy
ς
ς
η
η
ξ
ξ
e
v
e
v
e
v
v
A
A
A
A
+
+
=
,
gdzie:
A
A
A
v
ξ
η
ζ
ω ζ
ω η
=
−
,
A
A
A
v
η
ζ
ξ
ω ξ
ω ζ
=
−
,
A
A
A
v
ζ
ξ
η
ω η ω ξ
=
−
.
Prof. Edmund Wittbrodt
Przyspieszenie. Wektor przyspieszenia kątowego bryły w ruchu kulistym leży na chwilowej osi przyspieszenia.
Chwilowa oś przyśpieszenia bryły w ruchu kulistym
Wektor przyspieszenia kątowego możemy podać tak w nieruchomym układzie osi x, y, z
x
y
z
i
j
k
ε ω ε
ε
ε
= =
+
+
&
,
jak i w ruchomym układzie osi
ξ
,
η
,
ζ
e
e
e
ξ ξ
η η
ζ ζ
ε ω ε
ε
ε
= =
+
+
&
.
O
chwilowa
oś
przyśpieszenia
ε
Prof. Edmund Wittbrodt
Przyspieszenie liniowe dowolnego punktu A bryły określamy różniczkując względem czasu wyrażenie na prędkość
liniową tego punktu
(
)
(
)
A
A
A
A
A
A
A
Aob
Ado
d
a
v
r
r
r
r
r
a
a
dt
ω
ω
ω
ε
ω ω
=
=
×
= × + × = × + × ×
=
+
&
&
&
,
gdzie:
Aob
A
a
r
ε
= ×
–
przyspieszenie obrotowe
,
A
A
A
A
Ado
r
r
v
r
a
2
)
(
)
(
ω
ω
ω
ω
ω
ω
−
⋅
=
×
=
×
×
=
–
przyspieszenie doosiowe
.
Przyśpieszenie doosiowe i obrotowe bryły w ruchu kulistym
Znając
położenie
chwilowych
osi
prędkości i przyspieszenia, wartości
przyspieszeń obrotowego i doosiowego
możemy obliczać ze wzorów:
Aob
a
ε
ερ
=
,
2
ω
ω ρ
=
Ado
a
.
chwilowa o
ś
obrotu
ρ
ε
ρ
ω
chwilowa o
ś
przy
ś
pieszenia
O
ω
ε
A
a
Ado
a
Aob
a
A
Prof. Edmund Wittbrodt
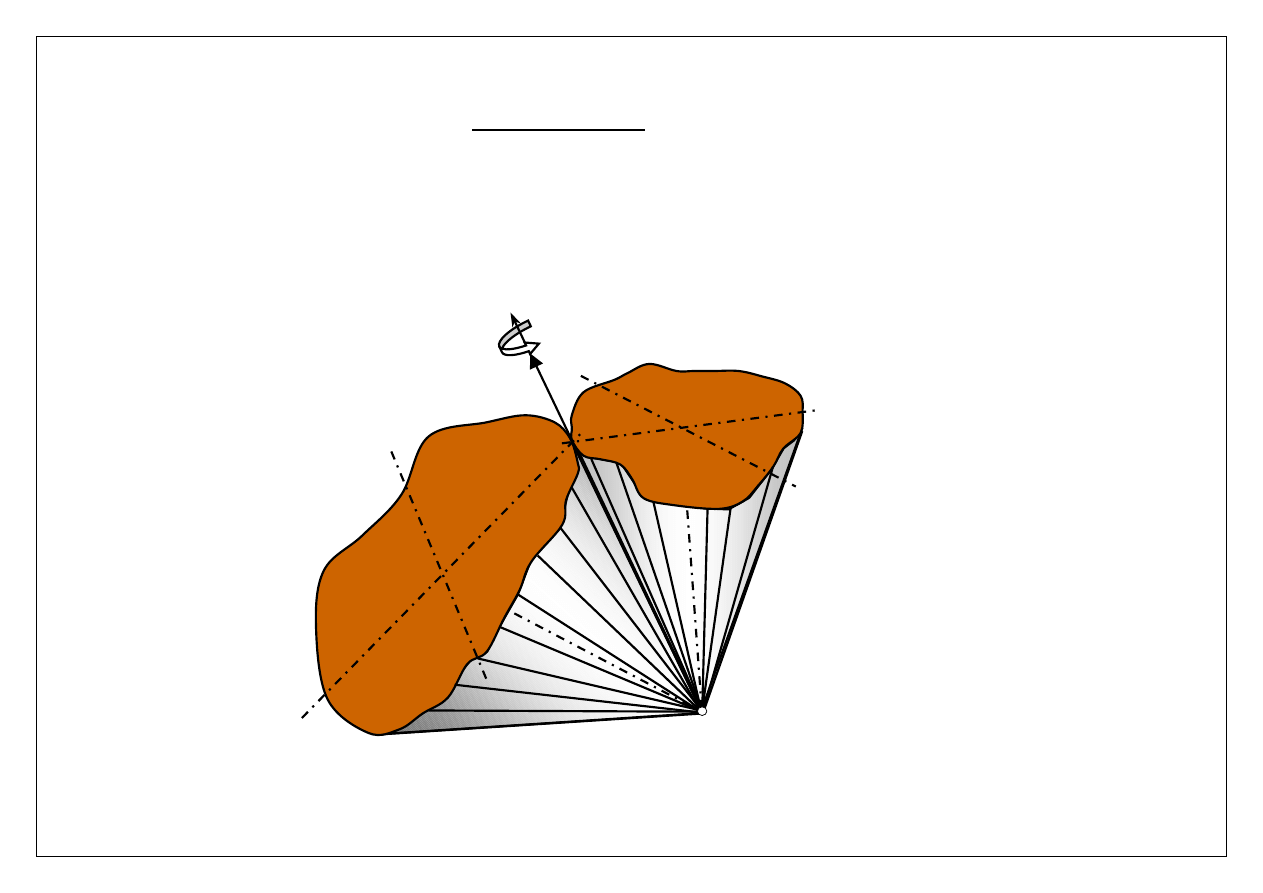
W czasie ruchu kulistego bryły sztywnej chwilowa oś obrotu zmienia swoje położenie względem nieruchomego układu
odniesienia U oraz względem poruszającej się bryły. Przechodzi ona jednak zawsze przez środek O ruchu kulistego. Z tego
względu chwilowe osie obrotu muszą leżeć na pewnej powierzchni stożkowej o wierzchołku w punkcie O. Podobnie,
miejscem geometrycznym chwilowych osi obrotu w układzie ruchomym U’ jest powierzchnia innego stożka, o wierzchołku
w punkcie O. Powierzchnie te nazywają się
aksoidami (aksioida ruchoma i aksioida nieruchoma)
.
aksioida nieruchoma
aksioida ruchoma
ω
ωω
ω
l
O=O’
Prof. Edmund Wittbrodt
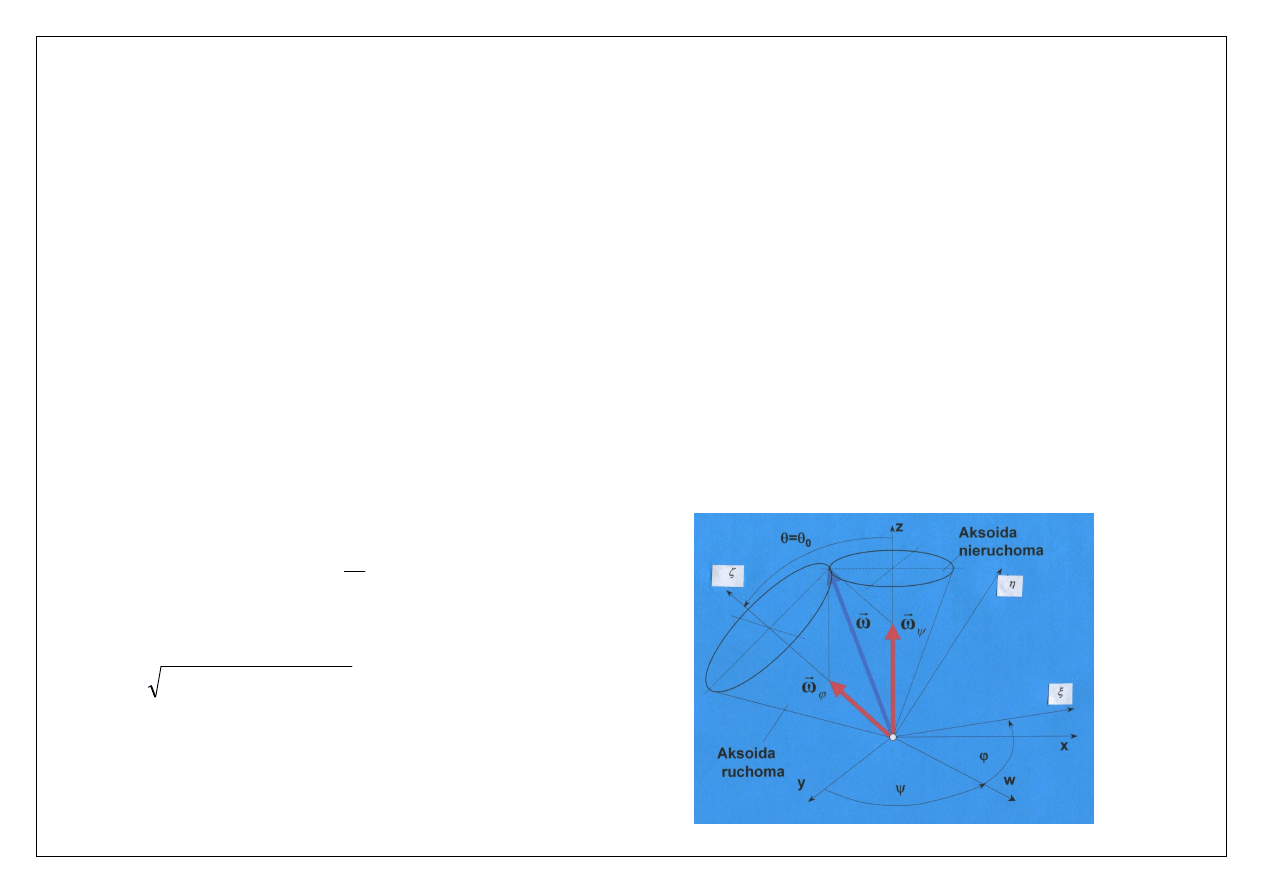
Precesja regularna
(szczególny przypadek ruchu kulistego)
Precesja regularna ma miejsce, gdy spełnione są warunki:
const
=
θ
, stąd
0
=
θ
&
const
=
ϕ
&
const
=
ψ
&
Dla precesji regularnej ruchy obrotowy precesji i obrotu własnego są jednostajnymi ruchami wokół osi
z
oraz
ζ
.
Precesję regularną można zinterpretować jako sumę dwóch obrotowych ruchów jednostajnych: ruchu wokół osi związanej z
bryłą
ζ
, nachylonej stale pod kątem
θ
, z prędkością kątową
const
=
ϕ
&
oraz ruchu wokół osi
z
, z prędkością kątową
precesji
const
=
ψ
&
.
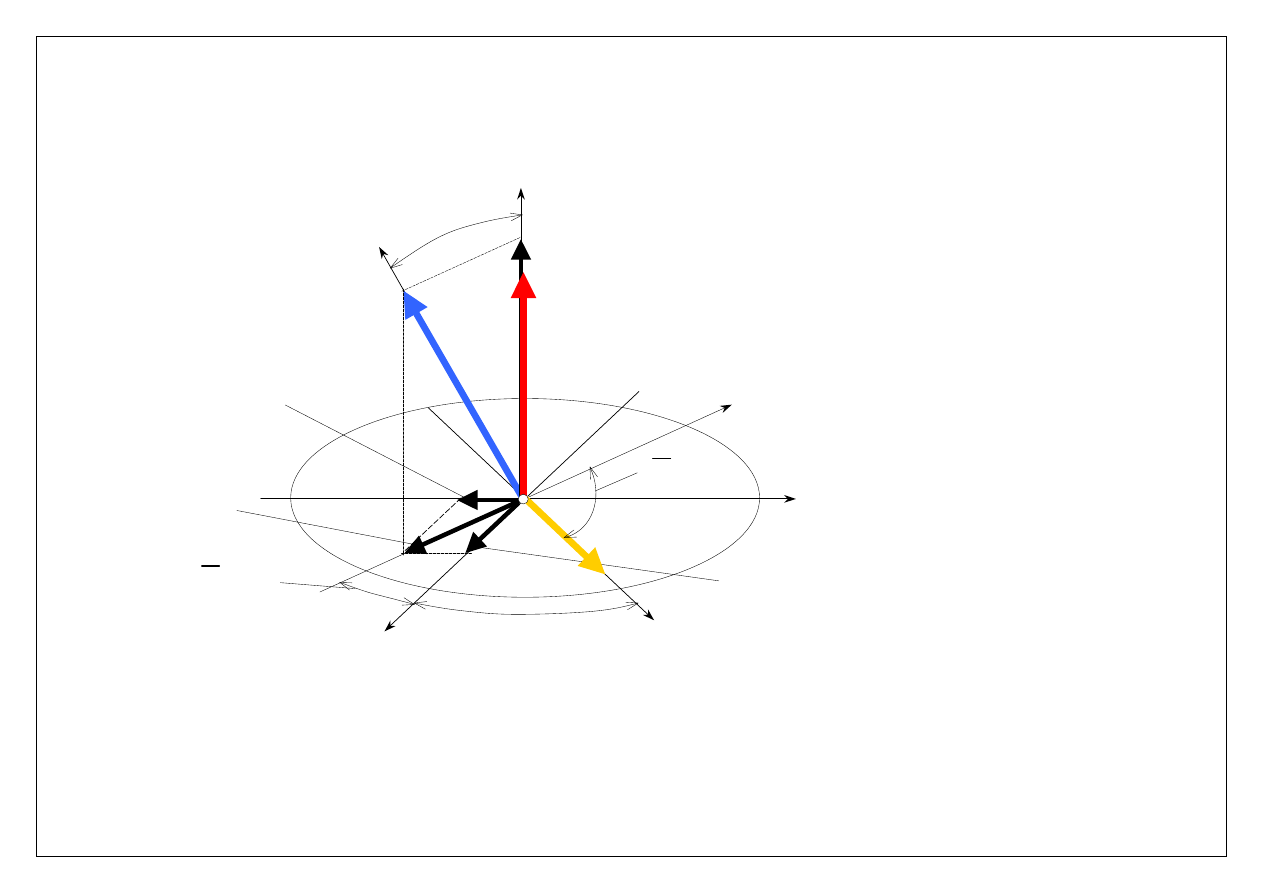
Wektor prędkości kątowej
ω
leży w płaszczyźnie z,
ζ
,
a jego długość wynosi (tw. cosinusów)
0
2
2
cos
2
θ
ψ
ϕ
ψ
ϕ
ω
&
&
&
&
+
+
=
gdzie:
const
=
ω
,
const
=
0
θ
Prof. Edmund Wittbrodt
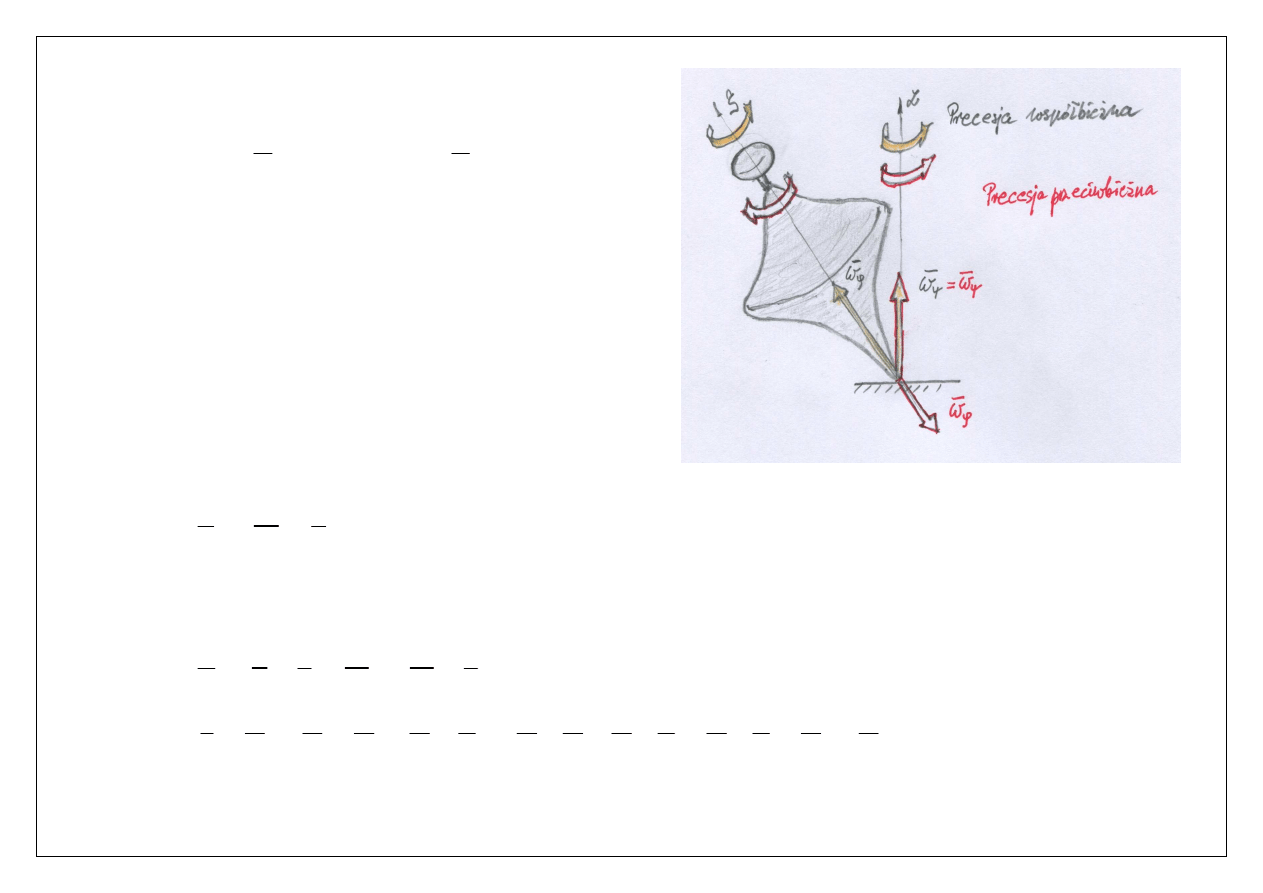
W zależności od wartości kąta pomiędzy wektorami prędkości
kątowej precesji
ψ
ω
i obrotu własnego
ϕ
ω
, mamy do czynienia
z precesją prostą (
współbieżną
), gdy
0
0
90
≤
θ
(kąt ostry), lub
precesją odwrotną (
przeciwbieżną
), gdy
0
0
90
>
θ
(kąt rozwarty).
Dla precesji regularnej prędkość punktu obliczamy z zależności
r
v
×
=
ω
natomiast przyspieszenie z zależności
)
(
r
r
a
×
×
+
×
=
ω
ω
ε
,
gdzie
ϕ
ψ
ψ
ω
ω
ϕ
ψ
ϕ
ψ
ψ
ψ
ϕ
ψ
ψ
ω
ω
ε
×
=
×
=
×
+
×
=
+
×
=
×
=
&
&
&
&
&
&
&
&
&
)
(
Prof. Edmund Wittbrodt
Ruch kulisty bryły. Dynamika
Rozważmy bryłę będącą w ruchu kulistym, której prędkość kątowa wynosi
ω
. W punkcie A tej bryły wyróżniamy
elementarną masę dm, której prędkość wynosi
v
.
Dynamika ruchu kulistego
Kręt bryły
względem nieruchomego punktu O obliczamy z zależności
( )
( )
(
)
O
m
m
K
r
vdm
r
r dm
ω
=
×
=
× ×
∫
∫
,
(4.98)
co przy
[ , , ]
r x y z
oraz
[
,
,
]
x
y
z
ω ω ω ω
daje wektor krętu w postaci
=
+
+
O
x
y
z
K
K i
K j
K k
,
(4.99)
gdzie:
x
x
x
xy
y
xz
z
K
J
D
D
ω
ω
ω
=
−
−
,
y
yx
x
y
y
yz
z
K
D
J
D
ω
ω
ω
= −
+
−
,
(4.100)
z
zx
x
zy
y
z
z
K
D
D
J
ω
ω
ω
= −
−
+
.
x
O
y
z
r
dm
ω
vdm
A

Prof. Edmund Wittbrodt
Wzory (4.100) w zapisie macierzowym mają następującą postać
[ ]
⋅
=
z
y
x
xyz
z
y
x
J
K
K
K
ω
ω
ω
,
(4.101)
gdzie
[ ]
−
−
−
−
−
−
=
z
zy
zx
yz
y
yx
xz
xy
x
xyz
J
D
D
D
J
D
D
D
J
J
(4.102)
- macierz (tensor) bezwładności.
Prof. Edmund Wittbrodt
Dowód:
dm
r
r
dm
v
r
K
m
m
O
∫
∫
×
×
=
×
=
)
(
)
(
)
(
ω
)
(
)
(
)
(
z
y
y
x
z
x
x
z
y
z
z
y
z
y
x
z
y
x
r
r
k
r
r
j
r
r
i
r
r
r
k
j
i
r
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
−
+
−
+
−
=
=
×
+
−
−
+
=
−
−
−
=
×
×
]
)
(
[
)
(
2
2
z
x
z
y
x
y
z
y
x
x
y
y
x
z
x
x
z
y
z
z
y
z
y
x
r
r
r
r
r
r
i
r
r
r
r
r
r
r
r
r
k
j
i
r
r
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
=
+
+
−
−
+
−
+
+
−
+
)]
(
[
]
)
(
[
2
2
2
2
y
x
z
y
z
y
x
z
x
z
y
z
z
x
y
x
y
x
r
r
r
r
r
r
k
r
r
r
r
r
r
j
ω
ω
ω
ω
ω
ω
)
(
)
(
)
(
2
2
2
z
z
y
z
y
x
z
x
z
y
z
y
y
x
y
x
z
x
z
y
x
y
x
x
r
r
r
r
k
r
r
r
r
j
r
r
r
r
i
ρ
ω
ω
ω
ω
ρ
ω
ω
ω
ω
ρ
ω
+
−
−
+
−
+
−
+
−
−
=
Prof. Edmund Wittbrodt
Po scałkowaniu po masie bryły otrzymujemy:
)
(
)
(
)
(
z
z
yz
y
xz
x
yz
z
y
y
xy
x
xz
z
xy
y
x
x
O
J
D
D
k
D
J
D
j
D
D
J
i
K
ω
ω
ω
ω
ω
ω
ω
ω
ω
+
−
−
+
−
+
−
+
−
−
=
Powyższe równanie zapisać możemy właśnie w postaci:
[ ]
⋅
=
z
y
x
xyz
z
y
x
J
K
K
K
ω
ω
ω
,
gdzie
[ ]
−
−
−
=
z
yz
y
xz
xy
x
xyz
J
sym
D
J
D
D
J
J
.
- macierz (tensor) bezwładności
.
Co było do udowodnienia.
Prof. Edmund Wittbrodt
Równanie ogólne
ruchu kulistego otrzymamy z twierdzenia o pochodnej względem czasu krętu bryły
O
O
K
M
=
&
,
(4.103)
co można zapisać w postaci układu trzech równań:
x
Ox
K
M
=
&
,
y
Oy
K
M
=
&
,
z
Oz
K
M
=
&
.
(4.104)
W równaniach (4.104) występują składowe wektora prędkości kątowej oraz masowe momenty bezwładności (4.100).
Ponieważ w nieruchomym układzie odniesienia zmieniają się wraz z położeniem ciała wartości masowych momentów
bezwładności, rozwiązanie równania (4.103) napotyka na ogromne trudności.
Dla pokonania powyższych trudności wyrażamy kręt w układzie ruchomym
, ,
ξ η ζ
, związanym z bryłą
[
,
,
]
O
K
J
J
J
ξ ξ
η η
ζ ζ
ω
ω
ω
.
W układzie tym wektor krętu w zapisie macierzowym ma postać
[ ]
⋅
=
ζ
η
ξ
ξηζ
ζ
η
ξ
ω
ω
ω
J
K
K
K
, (4.105)
gdzie:
[ ]
)
,
,
(
ζ
η
ξ
ξηζ
J
J
J
diag
J
=
.
Bryła w ruchu kulistym
we współrzędnych prostokątnych i Eulera
ϕ
y
ξ
ψ
x
η
z
ζ
O
θ
ζ
ω
η
ω
ξ
ω
Prof. Edmund Wittbrodt
Następnie różniczkujemy względem czasu (4.103), pamiętając że wektor
O
K
wiruje z prędkością kątową
ω
. Zatem mamy
*
O
O
O
O
K
K
K
M
ω
=
+ ×
=
&
&
,
(4.106)
gdzie
*
O
K
&
– pochodna lokalna, której składowe
*
*
*
,
,
K
K
K
ξ
η
ζ
&
&
&
obliczamy z zależności macierzowej
[ ]
⋅
=
=
∗
∗
∗
∗
ζ
η
ξ
ξηζ
ζ
η
ξ
ω
ω
ω
&
&
&
&
&
&
&
J
K
K
K
K
O
,
(4.107)
zaś:
ξ
η
ζ
ξ
η
ζ
ξ
η
ζ
ω
ω
ω
ω
×
=
O
e
e
e
K
K
K
K
=
(
) (
) (
)
ζ η
η ζ
ξ
ζ ξ
ξ ζ
η
η ξ
ξ η
ζ
ω
ω
ω
ω
ω
ω
−
+
−
+
−
K
K
e
K
K
e
K
K
e
,
(4.108)
,
,
O
M
M
M
M
ξ
η
ζ
=
(4.109)
– moment wyrażony w układzie ruchomym.
Prof. Edmund Wittbrodt
Po podstawieniu (4.105), (4.107)–(4.109) do (4.106) otrzymujemy układ równań w postaci:
(
)
J
J
J
M
ξ ξ
η
ζ
η ζ
ξ
ω
ω ω
−
−
=
&
,
(
)
J
J
J
M
η η
ζ
ξ
ζ ξ
η
ω
ω ω
−
−
=
&
,
(4.110)
(
)
J
J
J
M
ζ ζ
ξ
η
ξ η
ζ
ω
ω ω
−
−
=
&
.
Równania (4.110) noszą nazwę
równań dynamicznych Eulera
. Po rozwiązaniu tych równań i podstawieniu rozwiązań do
(3.50) możemy określić zmiany kątów Eulera w funkcji czasu.
Zatem
wektor krętu obliczamy
względem nieruchomego układu odniesienia z zależności (4.99) lub (4.101), albo względem
ruchomego układu związanego z bryłą z zależności (4.105).
Prof. Edmund Wittbrodt
Energia kinetyczna
. Energia kinetyczna bryły w ruchu kulistym jest równa
2
2
2
1
(
)
2
x
x
y
y
z
z
yz
y
z
zx
z
x
xy
x
y
E
J
J
J
D
D
D
ω
ω
ω
ω ω
ω ω
ω ω
=
+
+
−
−
−
,
(4.111)
co można zapisać w postaci macierzowej
{ }
[ ]
{ }
ω
ω
⋅
⋅
=
xyz
T
J
E
2
1
,
(4.112)
gdzie
{ }
)
,
,
(
z
y
x
col
ω
ω
ω
ω
=
.
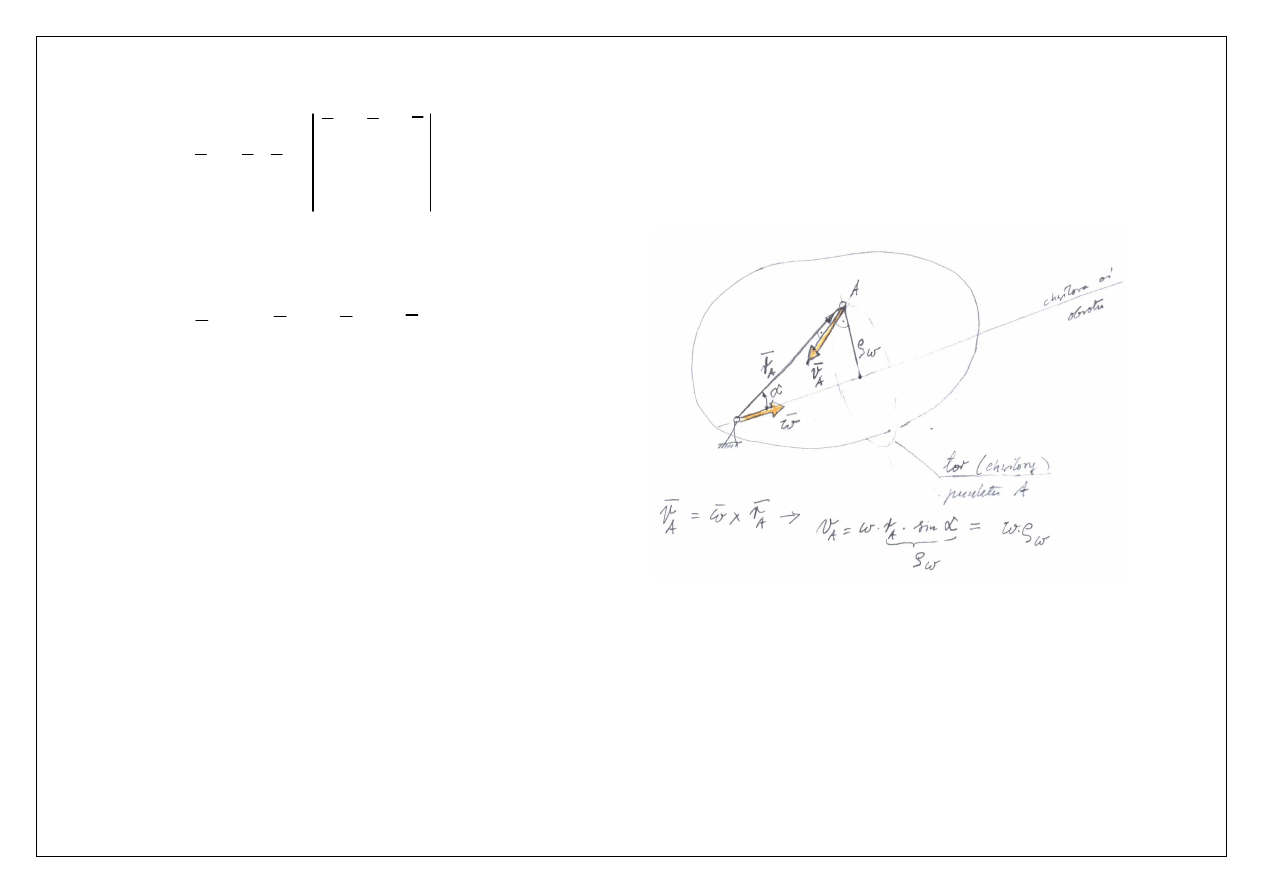
Jeżeli znamy położenie
chwilowej osi obrotu
l
i masowy moment bezwładności względem tej osi, to energię kinetyczną
możemy też obliczyć z zależności
2
1
2
l
E
J
ω
=
,
(4.113)
gdzie
J
l
– masowy moment bezwładności względem chwilowej osi obrotu.
Ruch kulisty bryły wokół chwilowej osi obrotu
O
l
ω
Wyszukiwarka
Podobne podstrony:
W03 i 04 z transportem wstęp
03-04 TIOB W03 i 04 z transportem wstep, TIORB
W03 i 04 z transportem wstęp 2
slajdy TIOB W03 i 04 z transportem wstep, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika
w03 04 03 12
W03 i 04 z transportem wstęp
m3 w03
Wykład 04
04 22 PAROTITE EPIDEMICA
04 Zabezpieczenia silnikówid 5252 ppt
Wyklad 04
Wyklad 04 2014 2015
04 WdK
04) Kod genetyczny i białka (wykład 4)
2009 04 08 POZ 06id 26791 ppt
2Ca 29 04 2015 WYCENA GARAŻU W KOSZTOWEJ
więcej podobnych podstron