
Mechatronika
Moduł 5: Komponenty
mechatroniczne
Podręczniki
(Koncepcja)
Wojciech Kwaśny Andrzej Błażejewski
Politechnika Wrocławska, Instytut
Technologii Maszyn i Automatyzacji,
Wrocław, Polska
Projekt UE Nr 2005-146319 „MINOS“, Realizacja od 2005 do 2007
Europejski Projekt transferu innowacji dla dodatkowej kwalifikacji
Mechatronika dla specjalistów w zglobalizowanej produkcji
przemysłowej.
Ten projekt został zrealizowany przy
wsparciu finansowym Komisji Europejskiej.
Projekt lub publikacja odzwierciedlają
jedynie stanowisko ich autora i Komisja
Europejska nie ponosi odpowiedzialności za
umieszczoną w nich
zawartość

Partners for the creation, evaluation and dissemination of the MINOS and the MINOS**
project.
- Chemnitz University of Technology, Institute for Machine Tools and Production
Processes, Germany
- np – neugebauer und partner OhG, Germany
- Henschke Consulting, Germany
- Corvinus University of Budapest, Hungary
- Wroclaw University of Technology, Poland
- IMH, Machine Tool Institute, Spain
- Brno University of Technology, Czech Republic
- CICmargune,
Spain
- University of Naples Federico II, Italy
- Unis a.s. company, Czech Republic
- Blumenbecker Prag s.r.o., Czech Republic
- Tower Automotive Sud S.r.l., Italy
- Bildungs-Werkstatt Chemnitz gGmbH, Germany
- Verbundinitiative Maschinenbau Sachsen VEMAS, Germany
- Euroregionala IHK, Poland
- Korff Isomatic sp.z.o.o. Wroclaw, Polen
- Euroregionale Industrie- und Handelskammer Jelenia Gora, Poland
- Dunaferr Metallwerke Dunajvaros, Hungary
- Knorr-Bremse Kft. Kecskemet, Hungary
- Nationales Institut für berufliche Bildung Budapest, Hungary
- Christian Stöhr Unternehmensberatung, Germany
- Universität Stockholm, Institut für Soziologie, Sweden
Zawartość Szkolenia
Minos:
moduły 1 – 8 (podręczniki, ćwiczenia i rozwiązania do ćwiczeń dla):
Podstawy/ Kompetencje międzykulturowe, zarządzenie projektem/ Fluidyka / Napędy
Elektryczne i Sterowanie / Elementy Mechatroniki/ Systemy i Funkcje Mechatroniki/
Logistyka, Teleserwis, Bezpieczeństwo/ Zdalne Zarządzanie, Diagnostyka
Minos **:
moduły 9 – 12 (podręczniki, ćwiczenia i rozwiązania do ćwiczeń dla):
Szybkie Prototypowanie / Robotyka/ Migracja/ Interfejsy
Wszystkie moduły dostępne są w następujących językach:
Polski, Angielski, Hiszpański, Włoski, Czeski, Węgierski i Niemiecki
W celu uzyskania dodatkowych informacji proszę się skontaktować z
Chemnitz University of Technology
Dr.-Ing. Andreas Hirsch
Reichenhainer Straße 70, 09107 Chemnitz
phone: + 49(0)371 531-23500
fax: + 49(0)371 531-23509
e-mail: minos@mb.tu-chemnitz.de
www.tu-chemnitz.de/mb/WerkzMasch or www.minos-mechatronic.eu

Komponenty mechatroniczne - Podręcznik
Minos
3
Spis treści:
1
Czujniki indukcyjne........................................................................................................... 7
1.1 Informacje
podstawowe.................................................................................................... 7
1.2 Podstawy
teoretyczne
..................................................................................................... 8
1.2.1 Układ rezonansowy .......................................................................................................... 8
1.2.2 Układ elektroniczny ........................................................................................................ 10
1.3 Konstrukcja
podstawowa
............................................................................................... 11
1.3.1 Zasada
pracy.................................................................................................................. 11
1.3.2 Współczynniki korekcyjne .............................................................................................. 14
1.3.3 Sposób
zabudowy .......................................................................................................... 15
1.4. Czujniki
specjalne........................................................................................................... 17
1.4.1 Czujniki
indukcyjne
pierścieniowe .................................................................................. 17
1.4.2 Czujniki
pracujące w silnym polu elektromagnetycznym................................................ 18
1.4.3 Czujniki
pracujące w trudnych warunkach...................................................................... 19
1.5
Rozpoznawanie kierunku ruchu ..................................................................................... 20
1.6 Czujniki
NAMUR............................................................................................................. 21
1.7
Analogowe czujniki indukcyjne....................................................................................... 22
1.8 Zasilanie
prądem stałym ................................................................................................ 23
1.9 Zasilanie
prądem przemiennym (AC)............................................................................. 24
1.10 Zasady
łączenia czujników............................................................................................. 25
1.11
Zabezpieczenia i bezpieczeństwo czujników ................................................................. 27
1.12 Podłączanie czujników do sieci komunikacyjnych.......................................................... 28
1.13 Aplikacje ......................................................................................................................... 29
2
Czujniki pojemnościowe ................................................................................................. 29
2.1
Informacje podstawowe.................................................................................................. 29
2.2
Podstawy teoretyczne ................................................................................................... 30
2.3
Zasada działania czujnika pojemnościowego ................................................................ 32
2.4
Typy czujników pojemnościowych.................................................................................. 35
2.5
Materiał obiektu .............................................................................................................. 37
2.6
Kompensacja zakłóceń ................................................................................................. 39

Komponenty mechatroniczne - Podręcznik
Minos
4
2.7
Aplikacje.......................................................................................................................... 40
3
Czujniki ultradźwiekowe.................................................................................................. 42
3.1
Informacje podstawowe ................................................................................................. 43
3.2
Podstawy teoretyczne..................................................................................................... 44
3.2.1 Rozchodzenie się fal dźwiękowych w powietrzu............................................................. 43
3.2.2 Wpływ środowiska .......................................................................................................... 46
3.2.3 Przetworniki fali ultradźwiekowej .................................................................................... 47
3.2.4 Wytwarzanie fali ultradźwiękowej ................................................................................... 50
3.3
Zasada pracy czujnika ultradźwiekowego....................................................................... 54
3.3.1 Tryb dyfuzyjny................................................................................................................. 56
3.3.2 Tryb przelotowy............................................................................................................... 59
3.4
Zakłócenia pracy czujników ............................................................................................ 61
3.4.1 Czynniki fizyczne ............................................................................................................ 61
3.4.2 Czynniki montażowe ....................................................................................................... 61
3.4.3 Synchronizacja czujników ............................................................................................... 63
3.5
Specjalne czujniki ultradźwiękowe.................................................................................. 64
3.5.1 Czujnik refleksyjny .......................................................................................................... 64
3.5.2 Czujniki z dwoma przetwornikami w jednej obudowie .................................................... 67
3.6 Czujniki
z
wyjściem analogowym.................................................................................... 69
3.7
Aplikacje.......................................................................................................................... 71
4 Czujniki
fotoelektryczne .................................................................................................. 76
4.1 Charakterystyka
konstrukcji ............................................................................................ 76
4.2
Elementy fotoelektryczne................................................................................................ 78
4.2.1 Podstawy fizyczne .......................................................................................................... 78
4.2.1.1 Światło ............................................................................................................................ 80
4.2.1.2 Własności światła............................................................................................................ 80
4.2.2 Fotoemitery .................................................................................................................... 82
4.2.2.1 Diody elektroluminescencyjne (LED) .............................................................................. 83
4.2.2.2 Diody laserowe (LD) ....................................................................................................... 86
4.2.3 Fotodetektory .................................................................................................................. 88
4.2.3.1 Fotodiody ........................................................................................................................ 88
4.2.3.2 Fotodetektory liniowe PSD.............................................................................................. 91
4.2.3.3 Fotodetektory liniowe CCD .............................................................................................92
4.2.3.4 Fototranzystory ............................................................................................................... 93
4.3
Podstawowe rodzaje czujników ...................................................................................... 94
4.3.1 Czujnik przelotowy .......................................................................................................... 94
4.3.2 Czujniki refleksyjne ......................................................................................................... 96

Komponenty mechatroniczne - Podręcznik
Minos
5
4.3.3 Czujniki dyfuzyjne........................................................................................................... 99
4.4
Przetwarzanie sygnału ................................................................................................. 101
4.4.1 Źródła zakłóceń interferencyjnych................................................................................ 101
4.4.2 Zapobieganie interferencji ............................................................................................ 103
4.4.2.1 Modulacja światła ......................................................................................................... 103
4.4.2.2 Polaryzacja światła ...................................................................................................... 104
4.4.3 Margines działania ...................................................................................................... 106
4.4.4 Odległość robocza........................................................................................................ 109
4.4.5 Czas reakcji.................................................................................................................. 111
4.5
Specjalne rodzaje czujników ........................................................................................ 112
4.5.1 Czujniki refleksyjne z polaryzacją światła .................................................................... 112
4.5.2 Czujniki dyfuzyjne z eliminacja wpływu tła i pierwszego planu .................................... 113
4.5.3 Czujniki refleksyjne z autokolimacją............................................................................. 117
4.5.4 Czujniki ze światłowodami............................................................................................ 118
4.5.4.1 Światłowody ................................................................................................................. 118
4.5.4.2 Zasada działania .......................................................................................................... 121
4.6
Technika połączeń ....................................................................................................... 123
4.6.1 Typy połączeń .............................................................................................................. 123
4.6.2 Przełączanie wyjścia czujnika ...................................................................................... 124
4.7
Aplikacje ....................................................................................................................... 127
5
Czujniki magnetyczne .................................................................................................. 128
5.1
Informacje podstawowe................................................................................................ 129
5.2
Podstawy teoretyczne .................................................................................................. 130
5.2.1 Pole
magnetyczne........................................................................................................ 129
5.2.2 Kontaktron .................................................................................................................... 132
5.2.3 Efekt
Halla .................................................................................................................... 134
5.2.4 Efekt magnetorezystancyjny ........................................................................................ 135
5.2.5 Efekt Wieganda ............................................................................................................ 136
5.3
Czujniki magnetyczne z kontaktronem ........................................................................ 137
5.4
Czujniki magnetyczne z hallotronem............................................................................ 140
5.5.
Czujniki magnetyczne specjalne .................................................................................. 141
5.5.1 Czujniki magnetorezystancyjne.................................................................................... 141
5.5.2 Czujniki magnetyczne Wieganda ................................................................................. 142
5.5.3 Czujniki magnetyczne z magnesem ............................................................................. 144
5.6
Warunki zabudowy ....................................................................................................... 145
5.7
Aplikacje ....................................................................................................................... 147
Komponenty mechatroniczne - Podręcznik
Minos
1
Czujniki indukcyjne
1.1
Informacje podstawowe
Czujniki indukcyjne stanowią najpopularniejszą grupę czujników sto-
sowanych w układach automatyki. Wykorzystywane są one do kontroli
położenia, przemieszczeń i ruchu mechanizmów związanych ze ste-
rowanymi urządzeniami. Ich prosta i zwarta konstrukcja, duża pew-
ność i niezawodność działania oraz łatwy montaż sprawia, że są chęt-
nie stosowane.
Czujniki te reagują, na pojawienie się przedmiotów metalowych w stre-
fie ich działania, przełączeniem stanu wyjścia czujnika lub zmianą war-
tości sygnału wyjściowego.
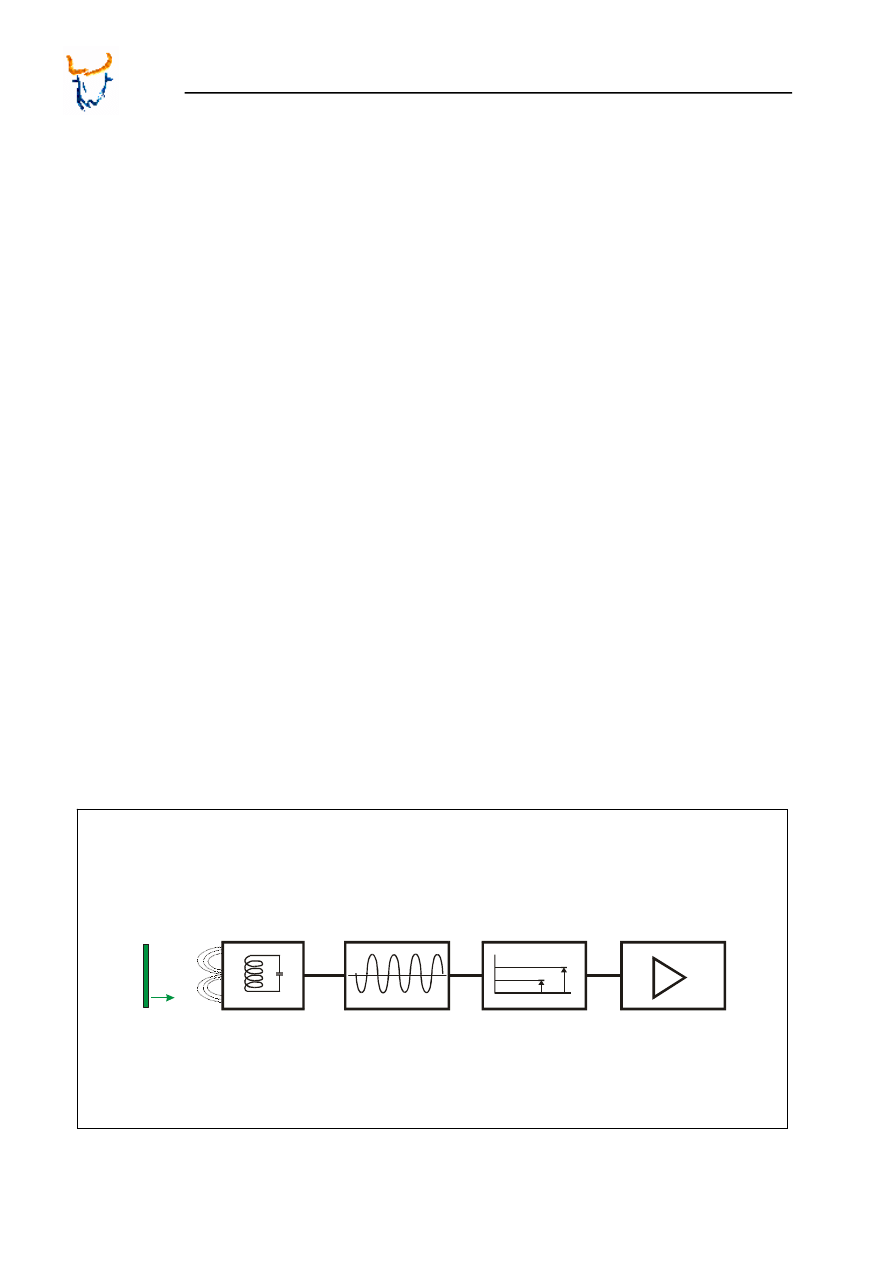
Podstawowymi składnikami czujnika indukcyjnego są (rys.1.1): głowica
zawierająca cewkę indukcyjną z rdzeniem ferrytowym, generator na-
pięcia sinusoidalnego, układ detekcji (komparator) i wzmacniacz wyj-
ściowy.
Obwód indukcyjny składający się z cewki i rdzenia ferrytowego wytwa-
rza wokół czoła czujnika zmienne pole elektromagnetyczne o wysokiej
częstotliwości. Pole to indukuje prądy wirowe w metalu zbliżanym do
czujnika, co z kolei powoduje obciążenie obwodu indukcyjnego i w
efekcie spadek amplitudy oscylacji. Wielkość tych zmian zależy od od-
ległości przedmiotu metalowego od czoła czujnika. Przełączenie wyj-
ścia następuje po zbliżeniu metalu na określoną odległość, wynikającą
z charakterystyki czujnika. W czujnikach z wyjściem analogowym po-
ziom sygnału wyjściowego jest odwrotnie proporcjonalny do odległości
obiektu od czujnika.
UKŁAD
WYJŚCIOWY
UKŁAD
DETEKCJI
UKŁAD
GENERATORA
GŁOWICA
CZUJNIKA
OBIEKT
L
C
Rys. 1.1:
Budowa czujnika indukcyjnego
6
Komponenty mechatroniczne - Podręcznik
Minos
1.2
Podstawy teoretyczne
1.2.1
Układ rezonansowy
Źródłem zmiennego pola magnetycznego w czujnikach indukcyjnych
jest cewka indukcyjna. Jeżeli prąd przepływający przez cewkę zmienia
się w czasie, to strumień magnetyczny w cewce też jest zmienny.
Zmianom tym towarzyszy zawsze zjawisko samoindukcji tzn. powsta-
wanie dodatkowego napięcia w zwojach cewki, przeciwdziałającego
zmianom prądu.
W elektrycznych układach rezonansowych całkowita energia jest
zgromadzona w postaci energii pola magnetycznego E
L
cewki induk-
cyjnej i energii pola elektrycznego naładowanego kondensatora E
c
. W
każdej chwili suma tych energii jest taka sama
tzn. E = E
L
+
E
c
= const. (rys. 1.2).
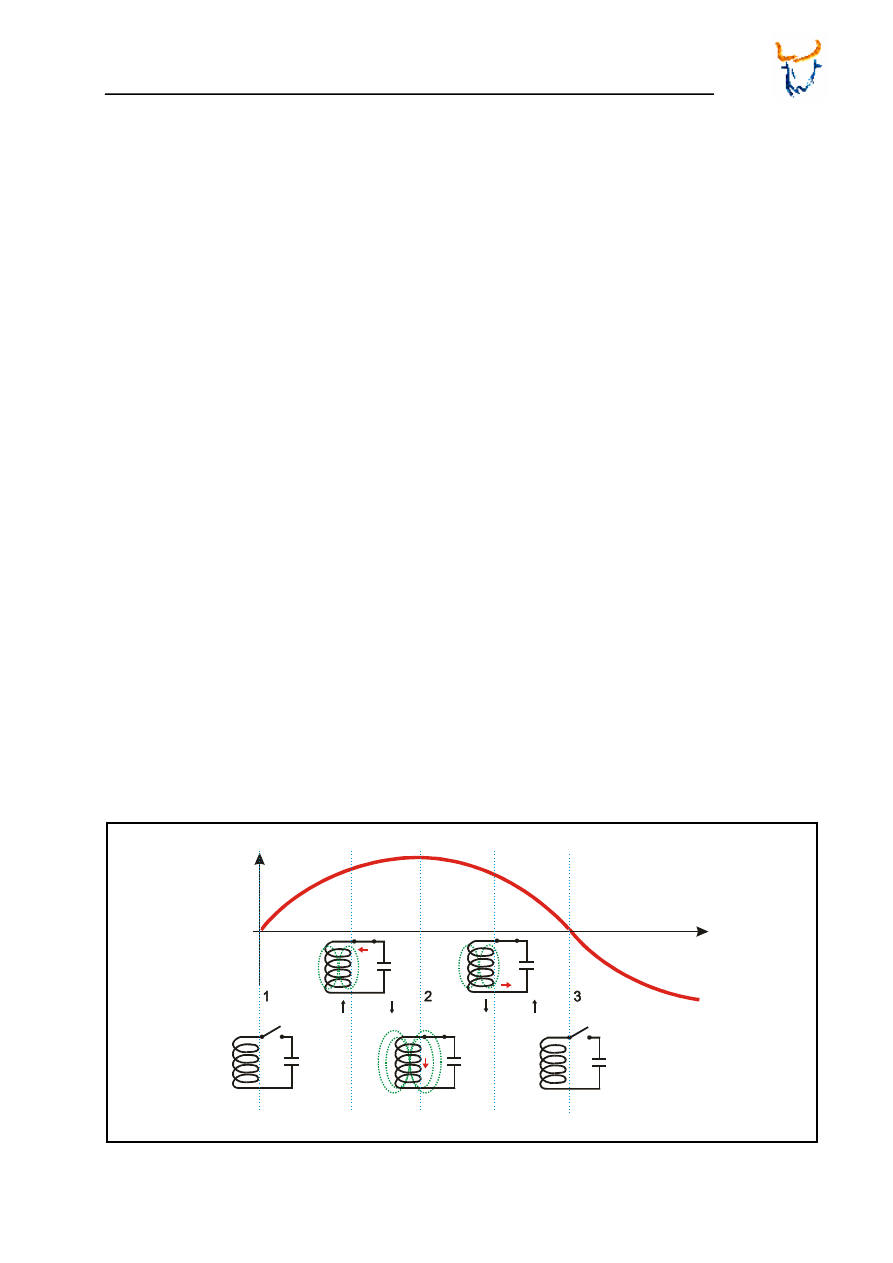
W początkowej fazie obwód LC, składający się z cewki L i kondensato-
ra C jest otwarty, a cała energia zmagazynowana jest na okładkach
naładowanego kondensatora (1). Po zamknięciu obwodu kondensator
zaczyna się rozładowywać i w obwodzie rozpocznie płynąć prąd I
zmieniając swoją wartość od zera do I
max
. Cała energia kondensatora
zostanie zmagazynowana w cewce (2).
Pomimo, że kondensator jest już całkowicie rozładowany prąd dalej
płynie w obwodzie, w tym samym kierunku. Jego źródłem jest zjawisko
samoindukcji w cewce, które podtrzymuje słabnący prąd. Ten prąd ła-
duje kondensator, więc energia jest ponownie przekazywana do kon-
densatora. Gdy ładunek na kondensatorze osiąga maksimum prąd w
obwodzie całkowicie zanika (3). Stan końcowy jest więc taki jak po-
czątkowy tylko kondensator jest naładowany odwrotnie i prąd w obwo-
dzie popłynie w przeciwnym kierunku. W obwodzie LC występują za-
tem oscylacje pola elektrycznego w kondensatorze i oscylacje pola
magnetycznego w cewce.
E =0
C
E =E
L
+
-
E -
C
E -
L
+
+
-
-
E =E
C
E =0
L
+
-
+
-
E =E
C
E =0
L
I
+
-
E -
C
E -
L
I
I
t
L
C
L
C
L
C
L
C
L
C
Rys. 1.2:
Oscylacje w obwodzie LC
7
Komponenty mechatroniczne - Podręcznik
Minos
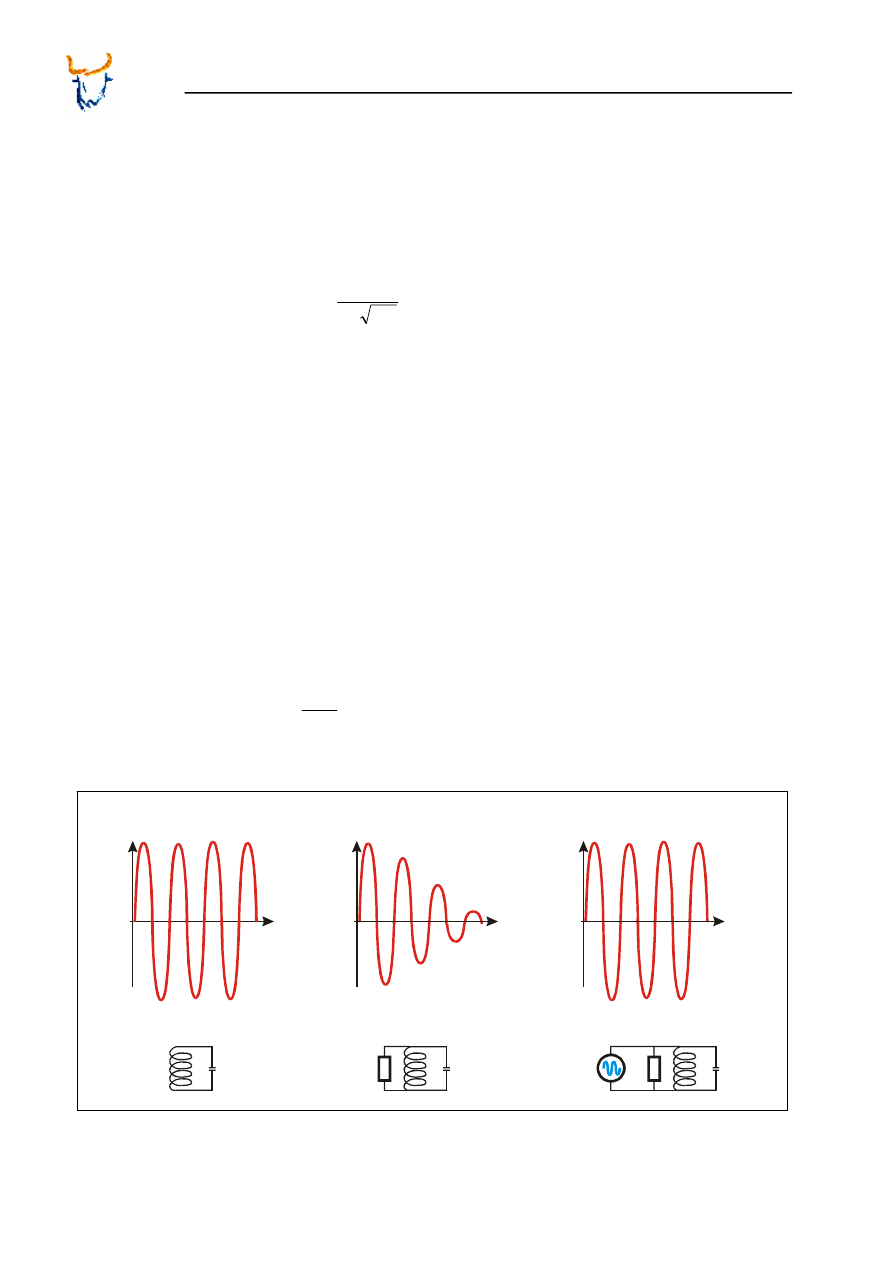
W rzeczywistych obwodach LC występują zawsze dodatkowe straty
energii, związane z własną rezystancją cewki i kondensatora. Z powo-
du tych strat oscylacje obwodu z rezystancją RLC będą tłumione (za-
nikające) (rys. 1.3). Oscylacje obwodu można podtrzymać, zasilając go
z zewnętrznego źródła napięciem sinusoidalnym. Maksymalna ampli-
tuda oscylacji wystąpi, gdy częstotliwość źródła podtrzymującego bę-
dzie równa częstotliwości własnej nietłumionego obwodu LC.
LC
f
f
π
2
1
0
=
=
[Hz],
gdzie:
f
– częstotliwość zewnętrznego źródła sinusoidalnego,
f
0
- częstotliwość własna nietłumionego obwodu LC,
L – indukcyjność [Henr],
C – pojemność [Farad].
Jest to warunkiem wystąpienia rezonansu napięć lub prądów w obwo-
dzie. Maksimum amplitudy oscylacji w obwodzie jest tym wyższe im
większa jest wartość współczynnika dobroci obwodu.
Współczynnik dobroci Q jest miarą strat powstających w elementach L
i C, reprezentowanych przez rezystancję równoległą R. Bezstratny
obwód miałby w warunkach rezonansu, nieskończenie dużą rezystan-
cję równoległą R. Im większe są straty w obwodzie tym rezystancja
równoległa jest mniejsza, a tym samym współczynnik dobroci też jest
mniejszy.
fL
R
Q
π
2
=
a)
b)
c)
L
C
R
L
C
R
G
RLC
RLC
L
C
LC
Rys. 1.3:
Oscylacje obwodów LC i RLC: a) obwód LC nietłumiony, b)obwód RLC bez źródła
zewnętrznego, c) obwód RLC zasilany sinusoidalnym źródłem zewnętrznym
8
Komponenty mechatroniczne - Podręcznik
Minos
1.2.2
Układ elektroniczny
W generatorach zawierających układ rezonansowy, składający się z
cewki i kondensatora, dla podtrzymania oscylacji stosuje się wzmac-
niacze operacyjne lub tranzystory.
Dla wystąpienia oscylacji wymagane jest spełnienie niezależnie dwóch
warunków: fazy i amplitudy. Warunek fazy wymaga, aby napięcie wyj-
ściowe było w fazie z napięciem wejściowym. Warunek amplitudy wy-
maga, aby wzmacniacz całkowicie kompensował tłumienie wprowa-
dzane przez obwód rezonansowy. W takim przypadku generator sam
dostarcza na wejście sygnał podtrzymujący oscylacje. Spełnienie wa-
runku fazy i amplitudy osiąga się przez odpowiedni podział obwodu LC
lub poprzez sprzężenie transformatorowe.
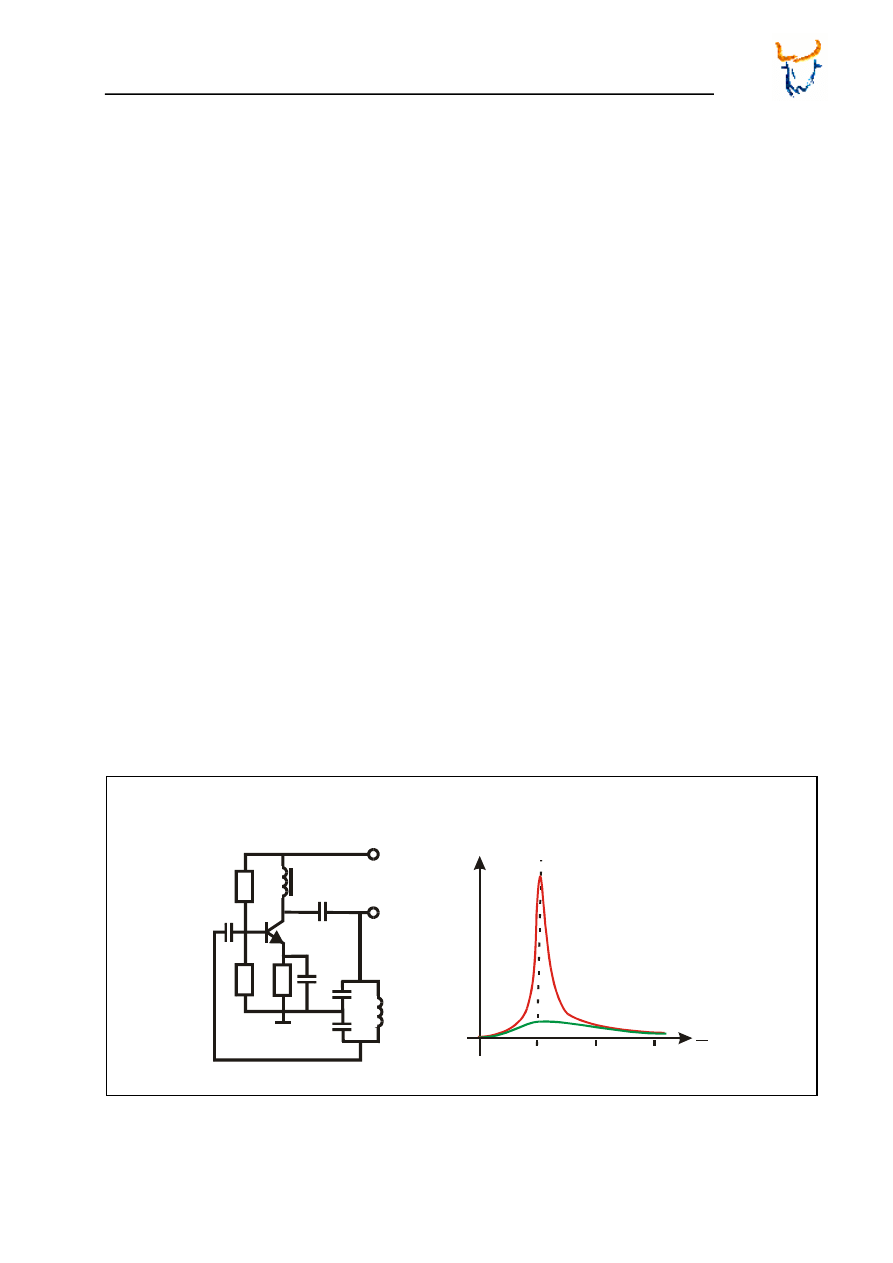
Oscylacje napięcia i prądu wytwarzane są w układzie rezonansowym
LC zawierającym cewkę i kondensator. Prąd doprowadzany do obwo-
du LC przekazuje mu część swej energii - doładowując kondensator, a
tym samym podtrzymując wzbudzane w tym obwodzie oscylacje. Po
ustaleniu się równowagi energii dostarczanej i traconej, amplituda prą-
du płynącego w obwodzie LC nie zmienia się i jego drgania stają się
niegasnącymi. Przykład takiego układu generatora LC przedstawia
Rys. 1.4a.
Poziom sygnału wyjściowego zależy od współczynnika dobroci Q
układu rezonansowego. Mała dobroć istotnie zmniejsza sygnał wyj-
ściowy z układu elektronicznego (rys. 1.4.b). Generatory LC są stoso-
wane do generowania przebiegów o częstości większej od kilkudzie-
sięciu kiloherców. Przy mniejszych częstotliwościach wymagana jest
zbyt duża wartość indukcyjności L obwodu rezonansowego. Trudno
wówczas uzyskać dużą dobroć obwodu, a cewki osiągają duże wymia-
ry.
a)
b)
U
D
ω
ω
0
Q=10
Q=1
1
2
3
+U
U
D
C
1
C
2
L
Rys. 1.4:
Układ elektroniczny: a)generator LC ze wzmacniaczem kompensującym tłumienie
w obwodzie, b) poziom sygnału wyjściowego dla różnych wartości Q
9
Komponenty mechatroniczne - Podręcznik
Minos
1.3
Konstrukcja podstawowa
1.3.1
Zasada pracy
Część aktywna czujnika indukcyjnego zawiera cewkę nawiniętą na fer-
rytowym rdzeniu kubkowym, wytwarzającą zmienne pole magnetycz-
ne. Zadaniem rdzenia kubkowego, o otwartym obwodzie magnetycz-
nym, jest wzmocnienie strumienia magnetycznego cewki oraz skiero-
wanie go w kierunku strefy pomiarowej czujnika.
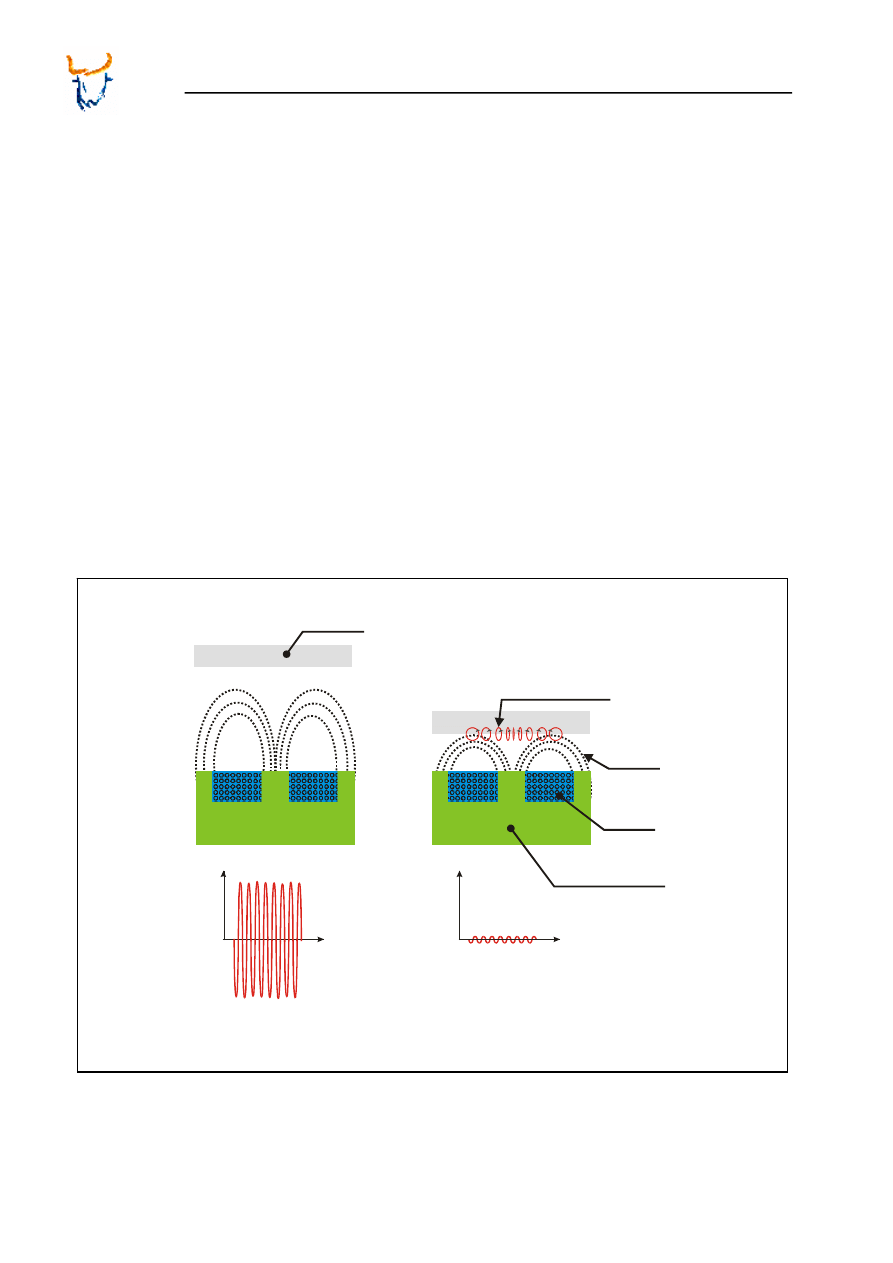
Zmianom pola magnetycznego towarzyszy zawsze powstanie pola
elektrycznego (wirowego), gdy w tym zmiennym polu znajdzie się
przewodnik. Wokół linii pola elektrycznego pojawi się pole magnetycz-
ne wirowe (rys. 1.5). Przeciwdziała ono polu magnetycznemu cewki,
odbierając część energii z obwodu rezonansowego.
Jest to równoznaczne ze zmianą strat w obwodzie rezonansowym, co
powoduje pogorszenie jego dobroci. Skutkuje to
tłumieniem amplitudy
oscylacji. Tłumienie amplitudy utrzymuje się przez cały czas przeby-
wania obiektu przewodzącego w strefie działania pola magnetycznego
cewki. Po usunięciu przedmiotu tłumienie obwodu rezonansowego za-
nika i amplituda oscylacji powraca do wartości początkowej.
Amplituda
Czas
Amplituda
Czas
Pole magnetyczne
prądów wirowych
Obiekt
przewodzący
Pole
magnetyczne
cewki
Rdzeń
ferromagnetyczny
Uzwojenia
cewki
Rys. 1.5:
Obiekt metalowy w polu magnetycznym cewki z rdzeniem ferrytowym
Układ elektroniczny czujnika określa odległość przedmiotu od cewki,
na podstawie stopnia tłumienia amplitudy i generuje sygnał wyjściowy.
Najczęściej jest to sygnał dwustanowy: obiekt jest w zasięgu czujnika
10
Wyszukiwarka
Podobne podstrony:
Mechatronika4
modul I historia strategii2002
Komunikacja Moduł (2)
Mechatronika6
Sem II Transport, Podstawy Informatyki Wykład XXI Object Pascal Komponenty
Moduł IV WŁADZA W013
MODUŁ POWIETRZE
Modul 1 Misja, strategia, planowanie
Komponenty metaboliczne
Modul 1 ZNACZENIE JAKOSCI
moduł losowości
poznawcze komponenty i teorie osobowosci1
Wykład Mechatronika 01 05
Moduł III cz 2 stała i stopien dysocjacji, zobojetnianie
Modul 3 Podstawy elektroniki cyfrowej
Modul 1 matem Rady
więcej podobnych podstron