Łukasz Przywarty
29.03.2009 r.
nr albumu: 171018
Podstawy automatyki i robotyki
Sprawozdanie z zajęć w laboratorium 021
Temat: Sterowniki przemysłowe PLC
1. Co to jest sterownik PLC?
PLC (z angielskiego Programmable Logic Controller) jest to swobodnie
programowalny sterownik (układ) w automatyce. Sterowniki PLC stosowane
są do kontroli i sterowania skomplikowanymi procesami technologicznymi,
a zasada ich działania opiera się na cyklicznym powtarzaniu zapisanego
w pamięci sterownika programu. Sterownik na podstawie danych otrzymanych
z programu analizuje stan wejść i ustala na wyjściach lub w pamięci
odpowiednie stany i wartości.
Bardziej szczegółowy schemat działania sterownika PLC obejmuje:
•
zbieranie pomiarów za pośrednictwem modułów wejściowych
(wykorzystuje się do tego czujniki analogowe i dyskretne oraz urządzenia
pomiarowe),
•
transmisję danych za pomocą modułów i łącz komunikacyjnych,
•
wykonanie programów aplikacyjnych – na podstawie przyjętych
parametrów i uzyskanych danych o sterowaniu lub maszynie,
•
generowanie sygnałów sterujących i przekazywanie ich poprzez moduły
wyjściowe do elementów i urządzeń wykonawczych,
•
(dodatkowo) realizację diagnostyki programowej i sprzętowej w celu
zapewnienia poprawności działania.
Początkowo funkcje sterowników PLC pełniły proste, odpowiednio połączone
moduły logiczne oraz maszyny cyfrowe, przy pomocy których realizowano
sterowania binarne z prostego poziomu obsługi. Następcami tych rozwiązań

stały się sterowniki PLC, między innymi urządzenie Modicon'a – 1969 rok - oraz
Simatic S3 Siemens'a – 1975 rok.
2. Przykładowe sterowniki PLC
–
GE FANUC Rx3i: członek rodziny programowanych kontrolerów
automatyki PACSystems (PAC), główne cechy: szybki procesor i duża
przepustowość, wsparcie dla otwartej komunikacji (przenoszenie aplikacji
pomiędzy rożnymi platformami sprzętowymi), różnorodność modułów
analogowych i dyskretnych, magistrala szeregowa i PCI w każdym
gnieździe.
–
VersaMax Nano: mimo niewielkich rozmiarów sterownik potrafi się
komunikować w protokole SNP/SNP-X, MODBUS RTU lub Custom ASCII,
a dzięki temu może być łatwo połączony z innymi sterownikami lub
urządzeniami w sieć. Kolejna cecha sterownika Nano to możliwość
przełączenia wejść sterownika do pracy w tryb jednego dwukie-
runkowego lub trzech jednokierunkowych liczników sygnałów – przydatne
w przypadku sterowania prostymi układami napędowymi czy pakującymi.
–
Modicon Quantum: jeden z wydajnych sterowników firmy Modicon
o modułowej i skalowalnej architekturze. Linia Quantum jest
ukierunkowana na tzw. procesy ciągłe (trwale powiązane z urządzeniami
produkcyjnymi, najczęściej przebiegają bez przerw w cyklu pracy
trwającym 24 godziny na dobę) oraz inne procesy wymagające
niezawodności i stabilności. Wykorzystano tu m.in. technologię
Hot-Stanby umożliwiającą w przypadku awarii jednej z jednostek
sterujących przełączenie na drugą jednostkę. Modicon Quantum
wykorzystuje protokół komunikacyjny Modbus charakteryzujący się
dostępem do nośnika master – slave, wykrywaniem i sygnalizacją
błędów, potwierdzeniem wykonania komend oraz zabezpieczeniem przed
blokadą.
–
Platforma Logix firmy Allen Bradley
•
ControlLogix, CompactLogix, FlexLogix: cała rodzina sterowników
posiadających: szeroką listę instrukcji, zadaniowy model programu,
możliwość tworzenia klas zmiennych, wspólny pakiet narzędziowy

RSLogix5000. Platforma Logix podczas komunikacji może korzystać
z sieci: Ethernet IP – L32E, ControlNet – L32C, DeviceNet – L32D oraz
z tradycyjnego portu szeregowego. ControlLogix - sterownik dedy-
kowany do aplikacji wymagających największej prędkości
i wydajności, łączących wiele rodzajów sterowania (max 32 zadania).
CompactLogix – sterownik stosowany do aplikacji maszynowych, gdzie
potrzeba jest ograniczona ilość wejść/wyjść oraz ograniczone potrzeby
komunikacji sieciowej. FlexLogix – sterownik o szerokim zastoso-
waniu, pozwala na łatwe dystrybuowanie lokalnych wejść/wyjść
w pobliżu sensorów i elementów wykonawczych.
3. Wizualizacja w automatyce
a) Programy SCADA (skrót od ang. 'Systemu Sterowania Nadrzędnego
i Wizualizacji) są wykorzystywane do zbierania danych z obsługiwanego
procesu i przesyłania ich do centralnego komputera, w którym używane
są one do sterowania i zarządzania procesami.
Podstawowe funkcje systemów SCADA:
•
komunikacja ze sterownikami PLC i urządzeniami wykonawczymi,
•
graficzne przedstawienie procesu na ekranie,
•
zadawanie parametrów wyjściowych i odczytywanie parametrów
wejściowych, a także zapamiętywanie i prezentowanie historii zmian
(trendów),
•
sterowanie automatyczne.
Wizualizacja w programach SCADA znacznie ułatwia diagnostykę
sprzętową ponieważ pomaga określić stany napędów, zaworów,
czujników itp. W wyniku tego operator otrzymuje graficzne i tekstowe
dane pokazujące możliwe źródło błędu. Programy SCADA czuwają także
nad stabilnością procesów, a w wyniku nieautoryzowanego lub
nietypowego działania wyświetlają komunikat ostrzegawczy. Przykładem
programu SCADA jest InTouch.
b) Panel operatorski (ang. HMI) poprzez odpowiednia konfigurację
przycisków, pokręteł czy przełączników umożliwia komunikację
z urządzeniami, w tym ze sterownikami PLC. Współczesne panele
operatorskie najczęściej wyposażone są w ekrany dotykowe. Panel
operatorski podobnie jak program SCADA jest wykorzystywany do
ustawienia parametrów wyjściowych i odczytywania wejściowych, a także
do gromadzenia danych oraz ich wizualizacji.
4. Opis możliwości sterowników PLC na przykładzie fragmentu linii
produkcyjnej
Podczas zajęć wykorzystano:
–
panel operatorski w sieci sterowników PLC: Modicon XBT G6330 – panel
wyposażony w dotykowy ekran dotykowy o przekątnej 12.1”,
–
sterowniki PLC,
–
sieć UniTelway RS485 – wprowadzona przez firmę Telemechanique
i wykorzystywana dla obecnie produkowanych i popularnych sterowników
firmy Modicon,
–
fragment „linii produkcyjnej”.
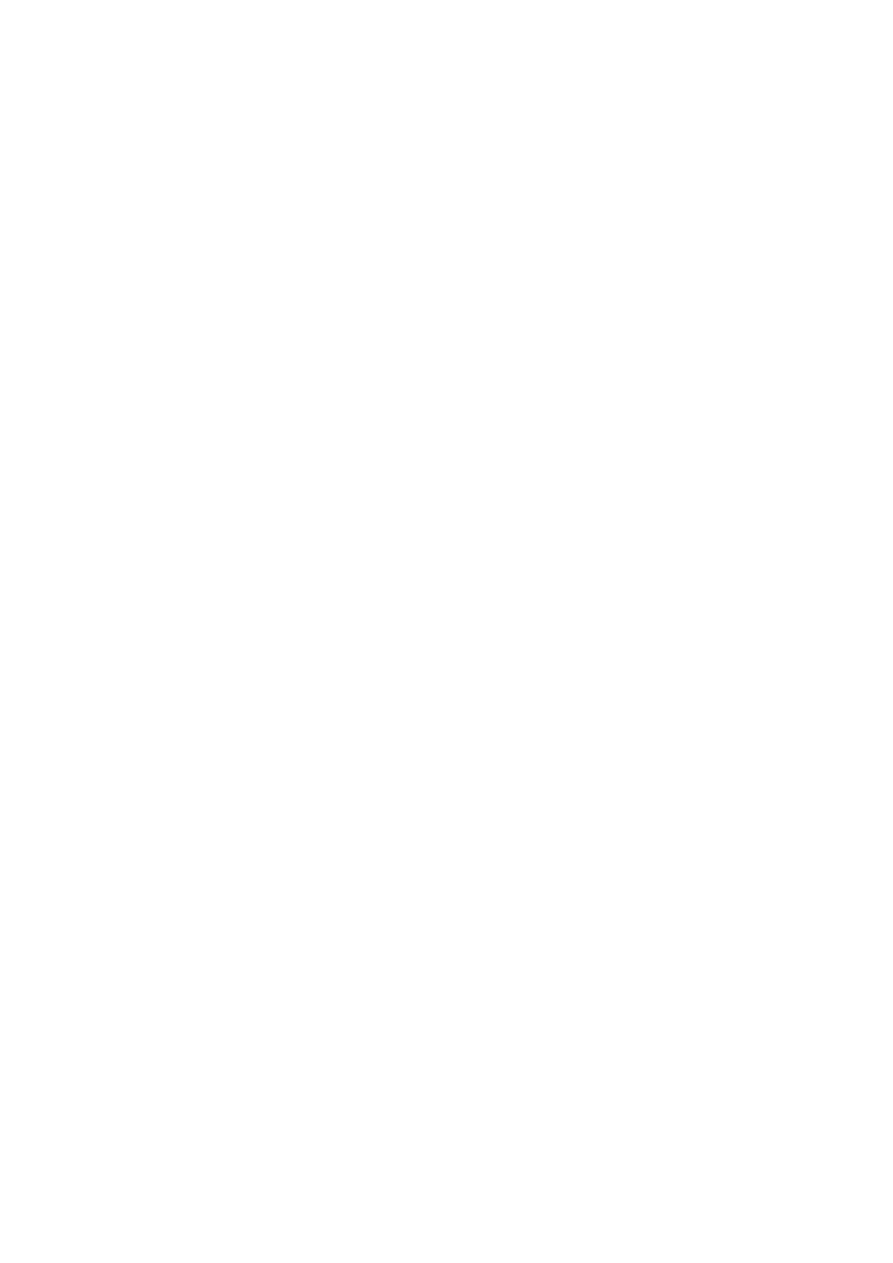
Z poziomu panelu operatorskiego rozpoczęto proces pomiaru (sterowanie
ręczne). Klocek był badany czujnikami pod kątem koloru, grubości, materiału,
z którego jest wykonany itp. Gdy spełnione są zadane kryteria klocek
przemieszcza się dalej, jeśli nie – klocek jest odrzucany. Droga pokonana przez
Ilustracja 1: Schemat sieci
klocek jest kontrolowana przez sieć czujników obecności, które lokalizują
przedmiot i w odpowiednim momencie dają sygnał do rozpoczęcia
odpowiednich działań np. obróbki klocka.
5. Wykorzystanie Internetu do zmiany stanów sterownika PLC
Podczas zajęć użyto:
–
sterownik SIEMENS S7-200 – kompaktowy sterownik PLC przeznaczony
do wykonywania niskokosztowych systemów sterowania,
–
program dostępowy do sterownika PLC – S7 MicroWin 4.0 – dedykowany
specjalnie do obsługi sterownika S7, jego obsługa odbywa się poprzez
okno przeglądarki internetowej,
–
sieć Internet zapewniającą komunikację ze sterownikiem.
Obsługa sterownika S7-200 jest bardzo prosta. Otwieramy dowolną
przeglądarkę, wpisujemy odpowiedni adres (w tym konkretnym przypadku
156.17.40.140) oraz dane dostępowe. Dzięki wykorzystaniu języka Java
możemy wymuszać (poprzez aplikację S7 MicroWin 4.0) zmiany stanu na
sterowniku. Zaktualizowany stan jest wyświetlony w oknie przeglądarki.
6. Wykorzystanie układów regulacji
Podczas zajęć użyto:
–
urządzenie wykonawcze obiektu regulacji (elementy wykonawcze: napęd
taśmociągu, napęd wentylatora, przepustnica),
–
komputer z oprogramowaniem SCADA,
–
sterowniki PLC.
Urządzenie wykonawcze zasadniczo potrafi zrealizować dwa zadania:
–
Segregacja kulek według koloru – ZPC (Zielona, Pomarańczowa,
Czerwona) lub CPZ (Czerwona, Pomarańczowa, Zielona). Po
umieszczeniu kulek w buforach (przez operatora) następuje ich
przesunięcie tak aby rura z podciśnieniem mogła dokonać segregacji.
Podczas gdy jedna kulka jest zasysana pozostałe dwie kulki przesuwają
się po taśmociągu. Segregacja trwa tak długo, aż uzyskamy żądaną
kolejność.
–
Regulacja PID – po umieszczeniu kulek w buforach (przez operatora)
następuje tak jak w poprzednim przypadku ich przesunięcie. Gdy
pomarańczowa kulka znajduje się bezpośrednio pod rurą rozpoczyna się
proces regulacji. Kulka jest zasysana do góry, a następnie utrzymywana
na zadanej wysokości. Wykonanie tej operacji umożliwia regulator PID.
Aby zakończyć zadanie potrzebne jest działanie operatora, po czym kulki
wracają do lewego, skrajnego położenia taśmociągu.
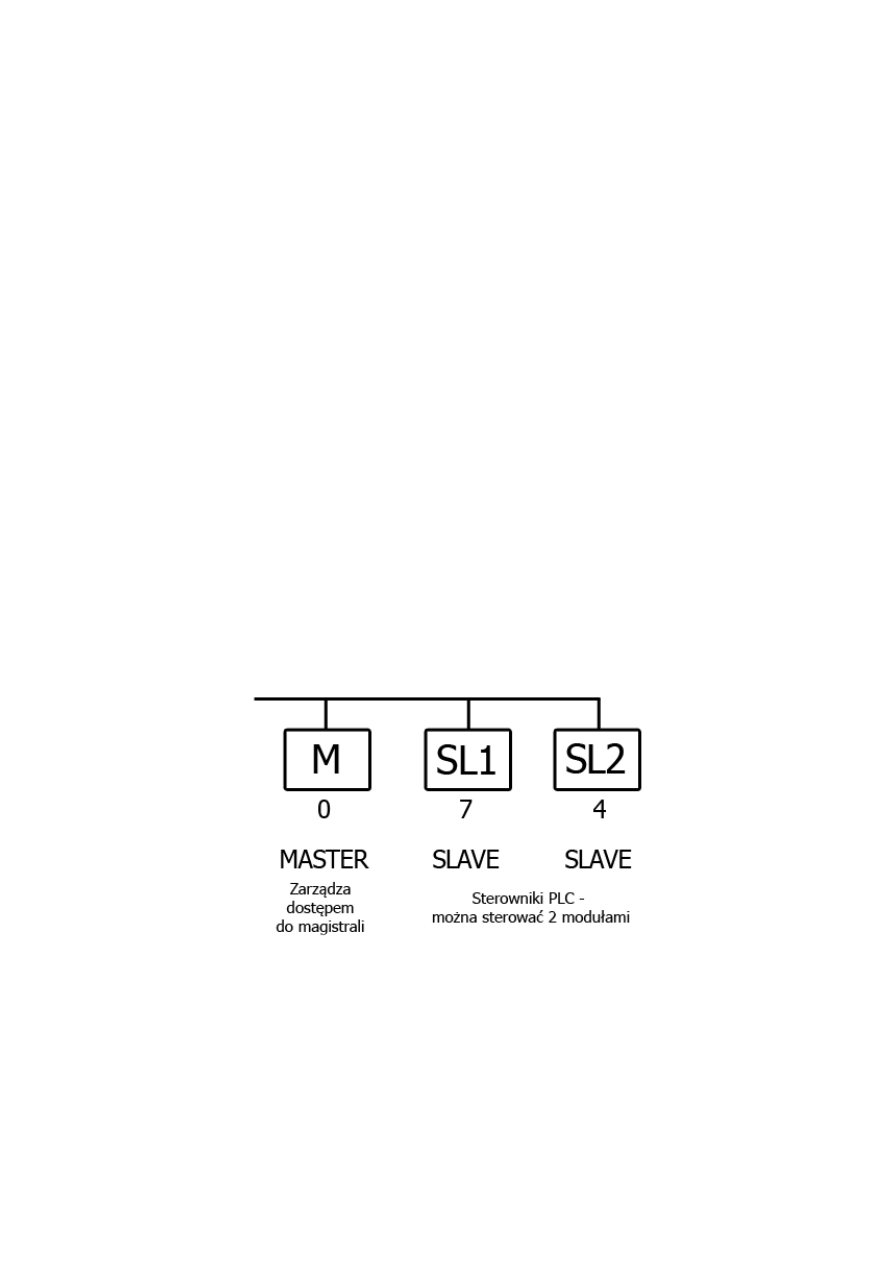
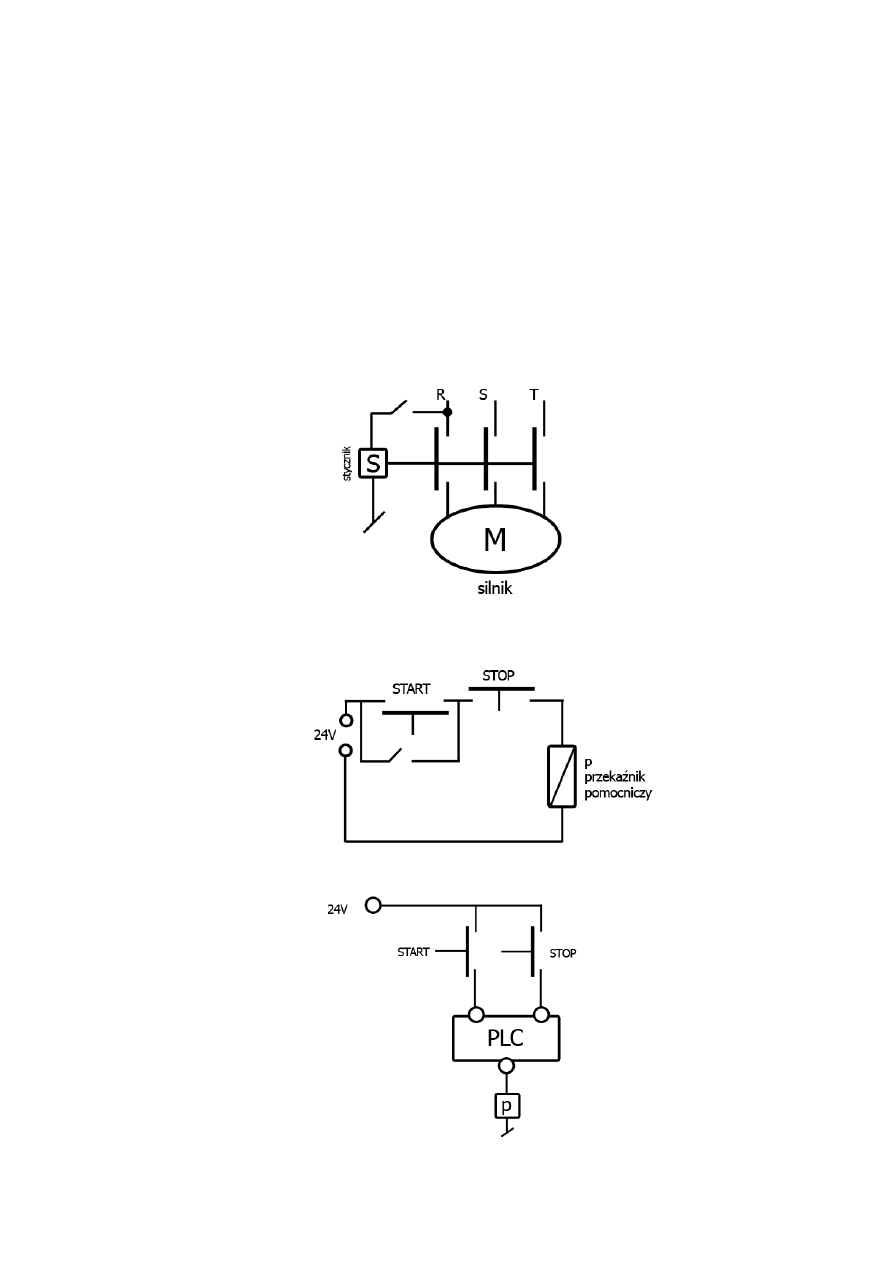
7. Projekt sterowania RSLogix5000
Schematy elektryczne projektu:
Ilustracja 2:
Ilustracja 3:
Ilustracja 4:
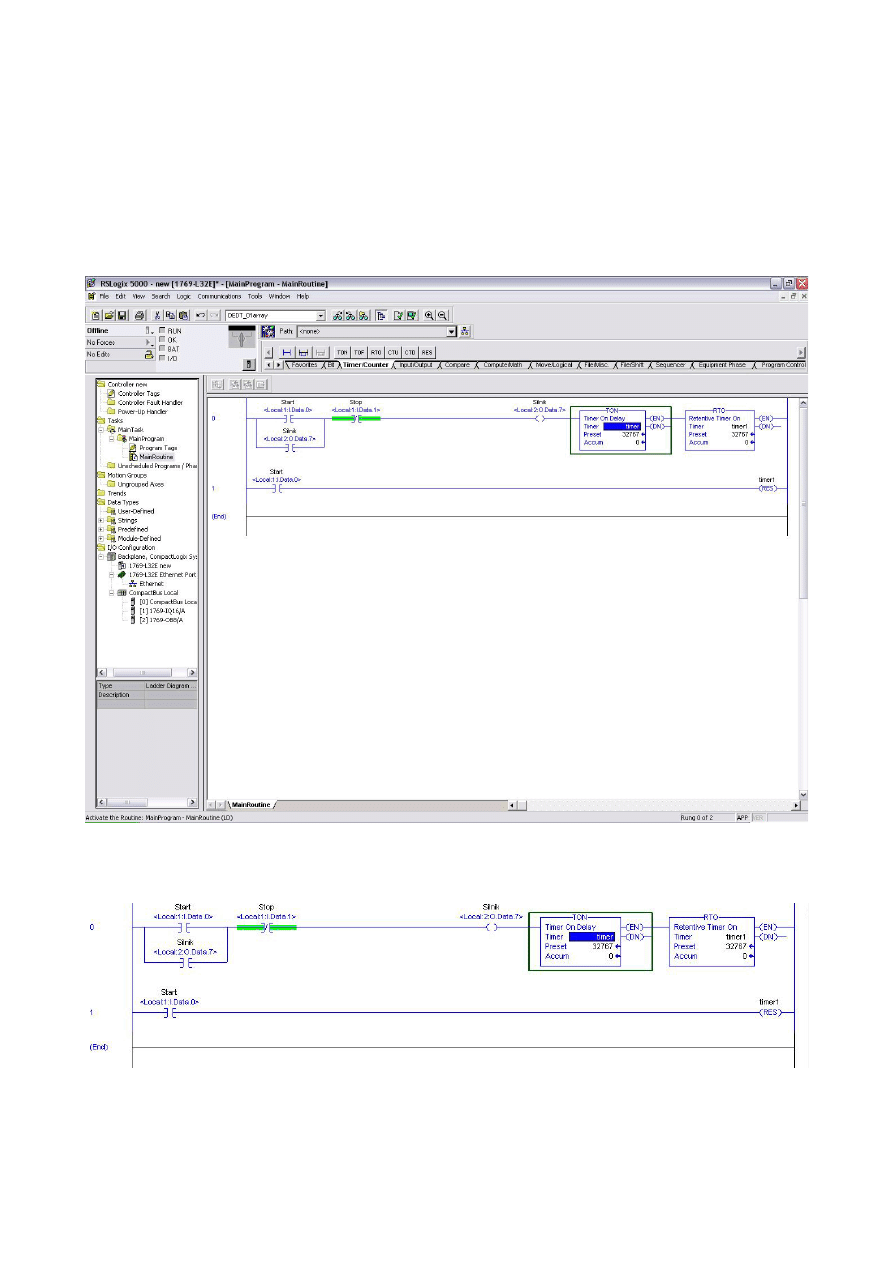
Program RSLogix5000 jest pakietem narzędziowym dołączonym do platformy
Logix. RSLOgix5000 wykorzystuje język drabinkowy LD (język drabinkowy
wywodzi się z symboli stosowanych w systemach automatyki bazujących na
przekaźnikach i jest graficzną reprezentacją działań wykonywanych przez
sterownik)
Lewa, pionowa linia schematu drabinkowego reprezentuje zasilanie obwodów
Ilustracja 5: Okno programu RSLogix5000
Ilustracja 6: Projekt sterowania w języku drabinkowym

sterowania, natomiast prawa pionowa linia jest powrotną linią zasilania (masą).
Schemat drabinkowy czytamy od lewej do prawej strony, od góry do dołu
(szczebel – linia pozioma - po szczebelku). Przepływ sygnału logicznego
w każdym ze szczebli jest kontrolowany przez prosty zestaw funkcji
programistycznych, pracujących podobnie jak przekaźniki i styki. To czy styk
prześle sygnał logiczny wzdłuż szczebla zależy od wartości zmiennej związanej
z tym stykiem w programie. Jeżeli styk lub inna funkcja występująca
w szczeblu nie przesyła dalej sygnału logicznego pozostałe elementy szczebla
nie są wykonywane. W naszym przypadku zmienienie stanu przełącznika (góra
– dół) powoduje uruchomienie konkretnej czynności w odpowiadającym
danemu stanowisku fragmencie „linii produkcyjnej”.
8. Wykorzystane materiały:
–
dokumentacja techniczna, broszury i ulotki reklamowe poszczególnych
sterowników PLC,
–
dokumentacja urządzenia wykonawczego obiektu regulacji – praca
dyplomowa P. Więzowskiego i R. Saternusa,
–
notatki własne z laboratorium,
–
prezentacja: „Programowanie systemów sterowania 1”, dr inż. K. Dzier-
żek, mgr inż. T. Huścio, Politechnika Białostocka,
–
Wikipedia.
Wyszukiwarka
Podobne podstrony:
Kinetyka 021 id 535402 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
Misc3 id 302777 Nieznany
cw med 5 id 122239 Nieznany
więcej podobnych podstron