
str. 1
Ćwiczenie 17
Pomiary wielkości nieelektrycznych – pomiary masy i temperatury
Program ćwiczenia:
1. Przygotowanie stanowiska pomiarowego
2. Waga z czujnikiem tensometrycznym
• Kalibracja wagi
• Ważenie
3. Pomiar temperatury przy pomocy termorezystora
4. Wykorzystanie multimetru do pomiaru temperatury
5. Pomiar temperatury termoparą
6. Pomiar różnicy temperatur
Wykaz przyrządów:
• Multimetr cyfrowy Rigol DM3051
• Platforma wagi PLC 3/6 RADWAG
• Odważniki: 2x2kg, 1x1kg klasa: 0.05
• Łaźnia wodna z termostatem elektronicznym
• Termos oraz zlewka laboratoryjna
• Czteroprzewodowy termorezystor Pt‐100 klasy A
• Zestaw dwóch termopar typu J ze złączami i przewodami kompensacyjnymi klasy 1
• Wzorcowy miernik temperatury HI98501
Literatura:
[1] Zatorski A., Rozkrut A. Miernictwo elektryczne. Materiały do ćwiczeń laboratoryjnych. Wyd. AGH, Skrypty nr
SU 1190, 1334, 1403, 1585, Kraków, 1990, 1992, 1994, 1999
[2] Chwaleba A., Poniński M., Siedlecki A. Metrologia elektryczna. WNT, Warszawa 1979, 1991, 1994, 2009
[3] Jellonek A., Gąszczak J., Orzeszkowski Z., Rymaszewski R.: Podstawy metrologii elektrycznej i elektronicznej.
Warszawa, PWN 1980
[4] Zatorski A.: Metrologia elektryczna. Ćwiczenia laboratoryjne. Kraków, Wydz. EAIiE AGH 2002. Skrypt nr 13
[5] Michalski L., Eckersdorf K.: Pomiary temperatury
[6] Instrukcja obsługi multimetru cyfrowego RIGOL serii DM3000
[7] Instrukcja obsługi miernika temperatury
HI98501
[8] Polska norma dotycząca pomiarów temperatury: PN‐59/M‐53852
[9] Polska norma dotycząca termopar: PN‐EN 60854‐1
[10] Instrukcja obsługi łaźni wodnej
[11] Technika pomiarowa, S. Tumański, WNT, Warszawa 2007
[12] Okręgowy Urząd Miar. 2009. http://www.urzadmiar.krakow.pl.
str. 2
Zakres wymaganych wiadomości:
• budowa i zasada działania czujników tensometrycznych,
• właściwości mostków tensometrycznych i sposoby ograniczania wpływu temperatury na wynik
pomiaru,
• metody pomiaru masy i siły z wykorzystaniem czujników tensometrycznych,
• zjawisko termoelektryczne oraz budowa i zasada działania czujników termoelektrycznych,
• budowa i zasada działania czujników termorezystancyjnych,
• właściwości statyczne przetworników pomiarowych,
• dokładne metody pomiaru rezystancji.
UWAGA: Ćwiczenie można rozpocząć od dowolnego punktu!
Jeżeli jednak chcesz zrealizować pomiary temperatury
najpierw przygotuj stanowisko pomiarowe czyli wykonaj
punkt 1.
str. 3
1. Przygotowanie stanowiska pomiarowego
Ćwiczenie składa się z dwóch części. W pierwszej wykonane zostaną pomiary masy, zaś w drugiej
pomiary temperatury. Temperaturę bliską 0 °C osiąga się w termosie poprzez zmieszanie lodu z małą
ilością wody. Temperaturę powyżej 50 °C zapewnia łaźnia wodna.
Uwaga!
Ponieważ na stanowisku znajdują się naczynia z wodą oraz urządzenia elektryczne pod
napięciem, należy zachować szczególną ostrożność. Należy uważać, by nie przewrócić termosu,
zlewki oraz by nie „utopić” dokumentacji lub elektroniki w łaźni wodnej.
1) Należy sprawdzić, czy na stanowisku znajduje się termos z lodem. Jeżeli brakuje lodu, należy
zgłosić to prowadzącemu ćwiczenie. W celu ograniczenia nagrzewania mieszaniny, termos należy
zamknąć. Wyrównanie temperatury wody i lodu wymaga czasu dlatego punkt ten należy
wykonać na początku ćwiczenia.
2) Na stanowisku znajduje się łaźnia wodna z termostatem. Przed uruchomieniem łaźni należy
sprawdzić czy w środku znajduje się woda przykrywająca element grzejny oraz wbudowany
czujnik temperatury. Łaźnię należy włączyć oraz ustawić temperaturę termostatu na 60°C
poprzez przytrzymanie klawisza set na sterowniku łaźni [10]. Osiągnięcie stabilizowanej
temperatury wody wymaga czasu, dlatego punkt ten należy wykonać na początku ćwiczenia.
3) Pomiary z wykorzystaniem termopary należy zweryfikować dokonując pomiaru temperatury
miernikiem wzorcowym HI98501 (rysunek 1). Miernik należy włączyć na początku zajęć, aby
ustaliły się jego parametry pracy. Podczas pomiarów, wskazania tego miernika należy traktować
jako wskazania wzorcowe. Niepewność pomiaru temperatury miernikiem HI98501 wynosi ±0,3°C.
Rysunek 1 Wzorcowy miernik temperatury HI98501.
4) Włączyć komputer. Ze względu na złożoność obliczeń do ich wykonania można użyć arkusza
waga.xls (który znajduje się w katalogu CW17).
str. 4
2. Waga z czujnikiem tensometrycznym
We współczesnych konstrukcjach wag pomiar masy realizowany jest pośrednio, poprzez pomiar
siły ciężkości, z jaką masa oddziałuje w ziemskim polu grawitacyjnym. Przetworzenie tej siły na
proporcjonalną do niej wielkość elektryczną może odbywać się w różny sposób, jednak powszechnie
wykorzystuje się zjawisko odkształcenia materiałów sprężystych pod wpływem działania siły.
Powstałe w ten sposób w materiale sprężystym naprężenia są przetwarzane za pomocą czujników
tensometrycznych metalowych lub piezorezystywnych na sygnał elektryczny. Ponieważ względna
zmiana rezystancji tensometrów w wagach pomiarowych jest bardzo mała, do jej przetworzenia na
sygnał napięciowy stosuje się układ rezystancyjnego mostka Wheatstone’a. Ze względu na
zapewnienie kompensacji wpływu temperatury na wynik pomiaru oraz uzyskanie wystarczającej
czułości stosuje się cztery tensometry odpowiednio naklejone na element sprężysty, a elektrycznie
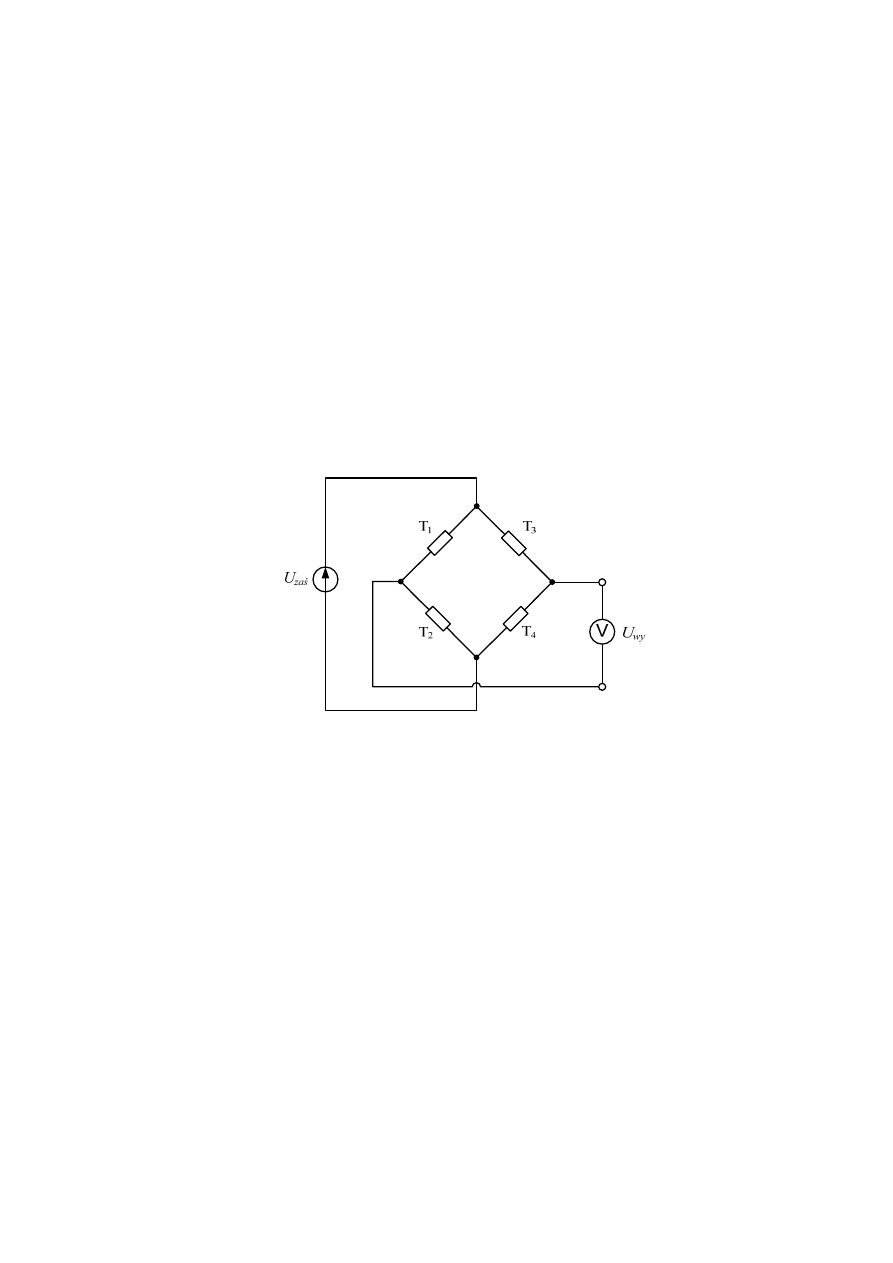
połączone w układzie „pełnego mostka”. Jeżeli napięcie zasilania mostka jest stałe można przyjąć, że
napięcie wyjściowe jest liniowo zależne od mierzonej masy. Z tego założenia należy skorzystać
podczas kalibracji wagi. Schemat połączeń przedstawia rysunek 2.
Rysunek 2 Schemat połączeń mostka tensometrycznego wagi
Przy stałej wartości napięcia zasilającego mostek tensometryczny jego napięcie wyjściowe U
wy
jest liniowo zależne od masy:
]
[
0
V
U
M
S
U
U
wy
+
⋅
=
(1)
gdzie:
U
S
‐ czułość napięciowa wagi,
0
U
‐ napięcie wyjściowe mostka przy zerowej masie (nieobciążona platforma),
M
‐ masa ważona.
str. 5
Kalibracja wagi
Celem tego punktu ćwiczenia jest kalibracja wagi tensometrycznej. Kalibracja inaczej
wzorcowanie – jest to ogół czynności ustalających relację między wartościami wielkości mierzonej
wskazanymi przez przyrząd pomiarowy, a odpowiednimi wartościami wielkości fizycznych,
realizowanymi przez wzorzec jednostki miary [12]. W przypadku wagi tensometrycznej celem
kalibracji jest ustalenie relacji pomiędzy napięciem wyjściowym mostka, a masą kalibrującą o znanej
wartości poprzez wyznaczenie czułości napięciowej S
u
oraz napięcia U
0
. Na mocy założenia o
liniowości charakterystyki statycznej, do jej wyznaczenia wystarczy pomiar w dwóch punktach.
Wykonanie pomiarów:
1) Połączyć układ według schematu z rysunku 2. Napięcie zasilania powinno wynosić 12 V.
2) Przy nieobciążonej wadze, zmierzyć i zanotować w arkuszu nr 1 (plik waga.xls) napięcie U
0
. W
tabelę wpisać również zakres woltomierza, na którym został wykonany pomiar oraz
odpowiadające mu wartości współczynników a i b.
3) Obciążyć wagę masą kalibrującą M
k
(odważniki 2kg+2kg+1kg) i zmierzyć odpowiadające jej
napięcie U
k
. Wszystkie wartości wpisać w odpowiednie pola arkusza; na tej podstawie program
obliczy czułość S
u
oraz niepewność jej wyznaczenia dla poziomu ufności p=0.95.
Obliczenia są wykonywane według następującego schematu:
• Czułość napięciową wagi wyznacza się po przekształceniu zależności (1):
]
[
0
kg
V
M
U
U
S
k
k
U
−
=
• Niepewności typu B: u
b
(U
k
) i u
b
(U
0
) pomiaru napięć U
k
i U
0
obliczamy ze znanej
zależności:
( )
3
x
gr
x
B
U
U
u
Δ
=
, gdzie
x
gr
U
Δ
jest błędem granicznym wyznaczanym na
podstawie zakresu pomiarowego woltomierza Z
u
RIGOL oraz współczynników
procentowych a i b charakteryzujących dokładność pomiaru:
100
U
x
gr
Z
b
U
a
U
⋅
+
⋅
=
Δ
.
• Niepewność wzorca masy wynika z jej klasy:
05
.
0
)
(
=
k
k
B
M
M
u
k
k
B
M
M
u
⋅
= 05
.
0
)
(
• Wyznaczone powyżej niepewności cząstkowe składają się na niepewność wyznaczenia
czułości napięciowej S
u
wagi. Zgodnie z prawem propagacji niepewności:
( )
( )
∑
=
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
∂
∂
=
3
1
2
2
j
j
B
j
U
U
X
u
X
S
S
u
(2)
str. 6
gdzie:
j
U
X
S
∂
∂
‐ to pochodna cząstkowa równania (2), liczona względem j‐tej wielkości X
j
,
wchodzącej w skład tego równania: odpowiednio U
k
, U
0
i M
k
;
( )
j
B
X
u
‐ niepewność
standardowa typu B pomiaru wielkości X
j
.
Po obliczeniu pochodnych otrzymujemy:
( )
( )
( )
( )
k
B
k
k
k
B
k
B
U
M
u
M
U
U
M
U
u
U
u
S
u
2
2
2
0
2
0
2
2
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
+
=
Dla poziomu ufności p=0.95 współczynnik rozszerzania wynosi k=2; skąd:
( )
( )
U
U
S
u
k
S
U
⋅
=
i ostatecznie wynik pomiaru:
( )
95
0
.
p
dla
S
U
S
U
U
=
±
Ważenie
Celem tego punktu ćwiczenia jest pomiar masy przy użyciu skalibrowanej wagi tensometrycznej.
Wyznaczone w poprzednim punkcie czułość napięciowa S
u
oraz napięcie offsetu U
0
jednoznacznie
określają liniową charakterystykę statyczną wagi. Przekształcając równanie (1) można więc obliczyć
wartość mierzonej masy M na podstawie pomiaru napięcia wyjściowego mostka U
wy
:
]
[
0
kg
S
U
U
M
u
wy
−
=
(3)
Niepewność pomiaru masy oblicza się w analogiczny sposób jak na etapie kalibracji wagi, tj.
stosując prawo propagacji niepewności (2) do zależności (3). Po obliczeniach otrzymujemy:
( )
( )
( )
( )
u
B
u
wy
u
B
wy
B
S
u
S
U
U
S
U
u
U
u
M
u
2
2
2
0
2
0
2
2
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
+
=
Dla poziomu ufności p=0.95 współczynnik rozszerzania wynosi k=2; skąd:
( )
( )
M
u
k
M
U
⋅
=
i ostatecznie wynik pomiaru:
( )
95
0
.
p
dla
M
U
M
=
±

str. 7
Wykonanie pomiarów:
1) Układ połączeń oraz napięcie zasilania powinno powinny być jak w punkcie „kalibracja wagi”.
2) Na platformie wagi położyć ważony przedmiot; mogą to być odważniki lub inne przedmioty
wskazane przez prowadzącego.
3) Zmierzyć napięcie wyjściowe mostka. Do arkusza nr 2 wpisać wszystkie niezbędne wartości.
4) Uzupełnić tabelę w formularzu sprawozdania.
5) Powtórzyć pomiar dla innego przedmiotu.

str. 8
3. Pomiar temperatury przy pomocy termorezystora
Termorezystor jest jednym z podstawowych czujników temperatury, który umożliwia zmianę
wielkości nieelektrycznej jaką jest temperatura, na wielkość elektryczną jaką jest rezystancja. W
termorezystorze, rezystancja czujnika zmienia się, ponieważ wraz ze zmianami temperatury zmienia
się rezystywność materiału z którego jest on wykonany [5]. Zależność tą opisuje następujący wzór:
S
l
T
T
R
⋅
=
)
(
)
(
ρ
(3)
gdzie:
T – temperatura,
R(T) ‐ rezystancja w funkcji temperatury T,
ρ(T) ‐ rezystywność przewodnika, zależna od temperatury T,
l ‐ długość przewodnika,
S ‐ pole przekroju poprzecznego przewodnika.
Termorezystory wykonuje się zarówno z metali, wówczas wraz ze wzrostem temperatury
rezystancja przetwornika wzrasta, jak również z tlenków metali i półprzewodników dla których
rezystancja zazwyczaj maleje przy wzroście temperatury.
Należy zawsze pamiętać, że na rezystancję termorezystora mierzoną „na zaciskach” składa się
rezystancja czujnika jak również rezystancja doprowadzeń oraz wszelkich połączeń. Aby
wyeliminować wpływ rezystancji doprowadzeń na pomiar stosuje się połączenia trójprzewodowe
oraz czteroprzewodowe.
Czujnik temperatury, niezależnie jakiego typu oraz z czego jest zbudowany, zawsze mierzy
temperaturę własną. Oznacza to, że czujnik musi osiągnąć stan równowagi termodynamicznej z
otoczeniem, by można było uznać wyniki pomiarów temperatury najbliższego otoczenia czujnika za
poprawne. Równowaga termodynamiczna osiągana jest po wyrównaniu temperatury: otoczenia,
obudowy czujnika wraz z wszystkimi występującymi „po drodze” magazynami energii cieplnej oraz
samego czujnika (np. platynowego drucika). Dopiero po osiągnięciu tego stanu mierzony sygnał
odpowiada temperaturze najbliższego otoczenia czujnika. Sposób osiągania równowagi
termodynamicznej przez czujnik opisuje jego charakterystyka dynamiczna w postaci transmitancji lub
równań różniczkowych (patrz ćwiczenie numer 21).
Termorezystory platynowe są szeroko stosowane ze względu na liczne zalety platyny, która
charakteryzuje się między innymi: stałością właściwości fizycznych i chemicznych, wysoką
temperaturą topnienia, zbliżoną do liniowej charakterystyką R(T) oraz brakiem histerezy. Dokładny
opis właściwości termorezystora platynowego oraz możliwości użycia go jako czujnika temperatury
opisano w licznej literaturze [1‐5] oraz w normie PN‐EN 60751.
Termorezystor używany podczas ćwiczenia posiada wyprowadzone cztery przewody, co
umożliwia pomiary zarówno metodą dwu jak i czteroprzewodową.
Wyk
Cele
1) Wyk
zlew
nale
czte
spra
Wsk
Ozna
Tabe
term
zlew
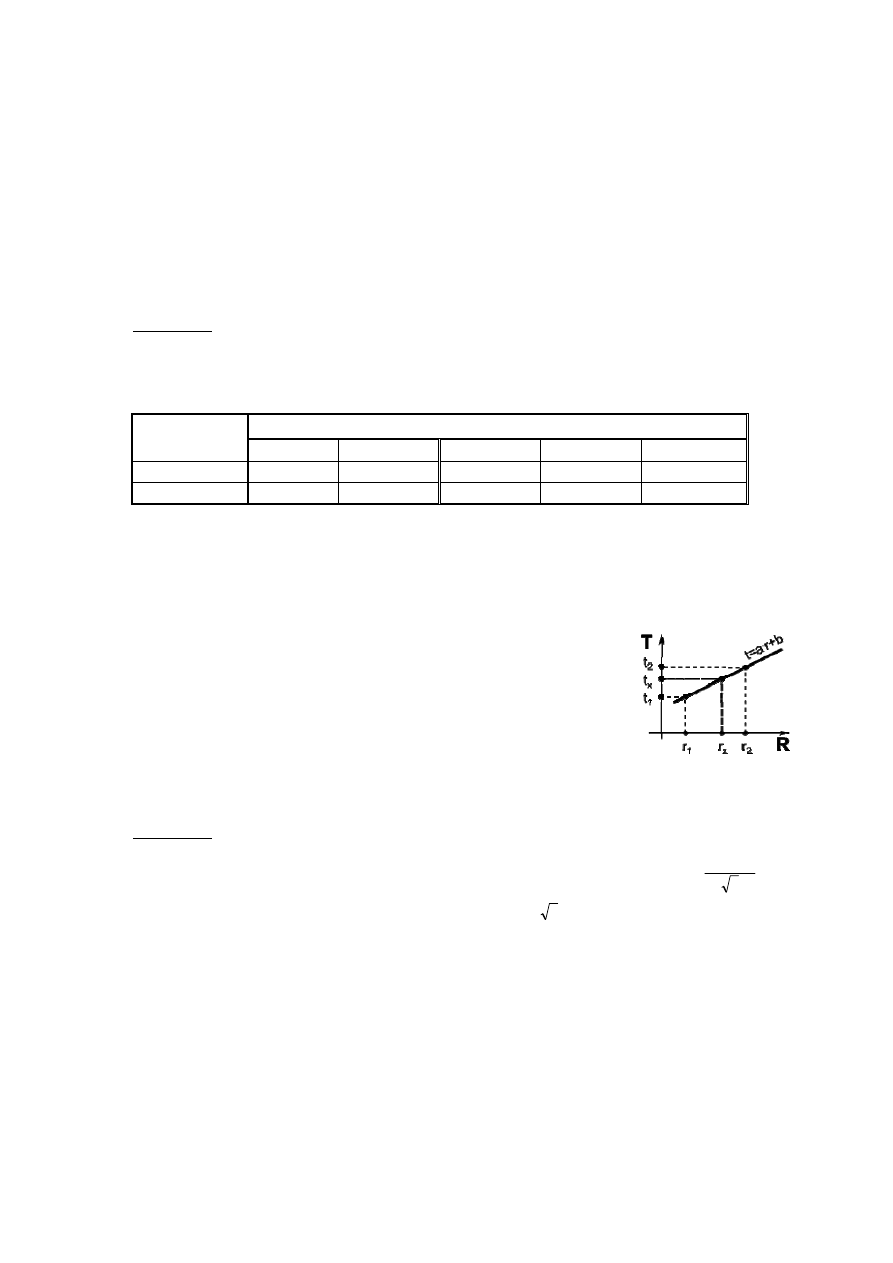
2) Posł
oraz
tabe
wart
r
x
, należ
równani
by r
1
< r
x
3) Posł
temp
U(T
4
Wsk
tabeli 3.
końcu ni
konanie pom
em tego punk
korzystując c
wce z wodą (t
ży zmierzy
roprzewodo
wozdania.
kazówka: Prz
aczenia oraz
ela 1 Wyniki
mos
wka/łaźnia
ugując się ta
z R
4WR
warto
eli, należy uży
tość nieznan
ży obliczyć p
a na prostą.
x
< r
2
.
ugując się n
peratury dla
4WR
)
dla pozio
kazówka: Błą
. Na tej pod
iepewność ro
miarów:
ktu ćwiczeni
czujnik PT10
temperatura
yć multime
wą (tryb 4W
zewody podł
schemat zna
pomiarów t
R
2WR
[Ω]
abelą 1 z nor
ości tempera
yć interpolac
nej temperat
podstawiając
Wartości r
1
normą PN‐EN
a metody 4W
omu ufności
ąd graniczny
dstawie nale
ozszerzoną:
a jest pomia
00 wykonać
a „pokojowa”
etrem RIG
WR – dwukro
łączone do j
ajdują się w
emperatury
T
2WR
[°
rmy PN‐EN 6
atury. Do wy
cji liniowej:
tury t
x
odpow
c dane odcz
oraz r
2
należ
N 60751 wyz
WR, a następ
p=0.95.
WR
gr
T
4
Δ
ob
ży obliczyć
(
)
WR
k
T
U
4
⋅
=
r temperatu
pomiary tem
”) lub w łaźn
GOL metod
tne przyciśn
ednego końc
punkcie 5.4.
czujnikiem P
Czujn
C]
R
4W
60751, należy
yznaczenia t
wiadającej z
zytane z tab
ży odczytać z
znaczyć błęd
pnie na tej
blicza się na
niepewność
(
)
WR
B
T
u
4
, g
ry czujnikiem
mperatury w
i (wysoka te
dą dwuprz
ięcie klawisz
ca czujnika p
normy PN‐E
PT100
nik PT100
WR
[Ω]
T
y odczytać o
temperatury
mierzonej re
beli (t
1
, r
1
, t
z tablic w ten
dy graniczne
podstawie n
podstawie
standardow
dzie
k
⋅
= 3
m PT100.
w termosie
mperatura).
ewodową
za Ω). Wynik
platynowego
EN 60751.
T
4WR
[°C]
odpowiadając
y, której nie
ezystancji
t
2
, r
2
) do
n sposób,
pomiaru
niepewność
zależności p
wą typu B
B
u
p
.
(niska temp
Rezystancję
(tryb 2W
ki zanotować
o mają ten sa
U(T
4WR
)
[°C
ce rezystanc
ma bezpoś
rozszerzoną
podanej w n
(
)
4
gr
WR
B
T
Δ
=
str. 9
peratura),
ę czujnika
R) oraz
ć w tabeli
am kolor.
C]
cjom R
2WR
rednio w
pomiaru
normie w
3
4WR
r
T
i w
str. 10
4. Wykorzystanie multimetru do pomiaru temperatury (punkt opcjonalny – zapytać
prowadzącego)
Większość współczesnych multimetrów posiada możliwość automatycznego przeliczania wartości
mierzonej, takiej jak np. rezystancja termorezystora na inną wielkość np. temperaturę. Przeliczanie
odbywa się zazwyczaj poprzez zadanie kilku punktów charakterystyki statycznej czujnika. Zdarza się,
że multimetry posiadają zaprogramowane charakterystyki podstawowych czujników, takich jak
popularne typy termorezystorów czy termopar.
Używany podczas ćwiczeń multimetr Rigol nie posiada wbudowanych fabrycznie charakterystyk,
umożliwia jednak utworzenie oraz zapamiętanie własnych. Celem tego punktu ćwiczenia jest
wykorzystanie multimetru Rigol DM3051 oraz termorezystora PT100 do automatycznego pomiaru
temperatury.
Tworzenie charakterystyki nowego czujnika
Przycisk Sensor włącza możliwość bezpośredniego użycia czujnika, czyli automatycznego
przeliczania elektrycznej wartości mierzonej (napięcia i prądu stałego, rezystancji oraz częstotliwości)
na inną wielkości (np. temperaturę, ciśnienie, kąt). Dokładny opis można znaleźć w dokumentacji
multimetru (strony 1‐29 w [6]). Charakterystyka czujnika zadawana jest przy użyciu listy punktów.
Sposób definiowania charakterystyki czujnika temperatury wraz z przykładami można znaleźć w
dokumentacji [6] multimetru Rigol (Example 6, strona 3‐7).
1) Czujnik PT100 powinien być podłączony do multimetru w taki sposób, by możliwy był poprawny
pomiar rezystancji metodą czteroprzewodową (strona 1‐17 w [6]).
2) Wciskając przycisk Sensor należy włączyć obsługę czujników w multimetrze.
3) Aby utworzyć nowy czujnik należy wybrać w menu pozycję
New
4) W zakładce właściwości
Prpty
możliwa jest zmiana nazwy czujnika (
Name
), należy zatwierdzić
nazwę domyślną Sensor
5) Należy wybrać typ czujnika, wciskając
Type
‐>
4WR
‐>
6) Następnie należy wybrać jednostkę wyjściową, wciskając
Unit
‐>
°C
‐>
7) Kolejnym krokiem jest zdefiniowanie punktów, które wyznaczają charakterystykę czujnika.
W tym celu należy wybrać
Define
. Na ekranie pojawi się pusta tablica, do której przyciskiem
Add
należy dodać dwa punkty charakterystyki termorezystora Pt100:
str. 11
a.
wartości
Meas
odpowiada wartości mierzonej, w przypadku termorezystora Pt100
jest to rezystancja, należy wpisać wartość 100 Ω,
b.
wartości
Corrsp
odpowiada wartość wyjściowej: temperaturze, w przypadku
Pt100, wartości 100 Ω odpowiada temperatura 0°C, należy więc wpisać wartość 0,
c.
wybranie
kończy dodawanie punktu charakterystyki, zaś
Done
zapisuje
wszystkie zmiany.
8) Gdy na ekranie wyświetlana jest tabela definiująca charakterystykę czujnika, dostępne są
dodatkowe opcje:
Add
umożliwia dodanie kolejnego punku,
Del
‐ usunięcie zaznaczonego,
Edit
zmianę wartości, zaś
Top
i
End
szybkie przesunięcie kursowa na początek i koniec tabeli.
9) Należy dodać drugi punkt charakterystyki termorezystora Pt100, któremu odpowiada
temperatura 100°C (należy posłużyć się normą PN‐EN 60751 w celu znalezienia odpowiedniej
wartości rezystancji). Po dodaniu obydwu punktów, charakterystyka czujnika opisana będzie
równaniem liniowym, które należy odszukać w normie PN‐EN 60751.
10) Jeżeli wszystkie dane zostały wprowadzone poprawnie, należy nacisnąć klawisz
w celu
zapisania wartości punktów oraz przejścia do wyższego poziomu menu.
11) Ostatnim krokiem tworzenia charakterystyki jest jej zapisanie w pamięci multimetru, poprzez
wybranie
Save
(w menu
New
).
Wykonanie pomiarów
1) Wybranie z menu opcji
Apply
włącza użycie konkretnej charakterystyki czujnika, po jej wybraniu
na wyświetlaniu powinna pojawić się mierzona temperatura.
2) Wybierając opcję
Disp
‐>
All
należy wyświetlić wielkość mierzoną (rezystancję) oraz wartość
przeliczoną (temperaturę).
3) Używając zaprogramowanej liniowej charakterystyki czujnika, należy zmierzyć temperaturę
w dwóch miejscach, zapisując w tabeli 2: temperaturę T
p
i rezystancję R
p
wskazywane przez
multimetr.
Tabela 2 Pomiary temperatury czujnikiem Pt100 z wykorzystaniem multimetru
Czujnik Pt100
Różnice temperatur
T
p
[°C]
R
p
[Ω]
T
t
[°C]
ΔT=T
t
‐T
p
[°C]
termos
zlewka/łaźnia
str. 12
4) Wyznaczyć temperaturę teoretyczną T
t
, wyliczoną na podstawie wartości zmierzonej rezystancji
R
p
oraz wielomianu drugiego stopnia (2), który jest dokładnym modelem charakterystyki
termorezystora PT100 i którego współczynniki znajduje się w normie czujnika PN‐EN 60751.
(
)
B
R
R
B
A
A
T
BT
AT
R
R
p
p
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⋅
⋅
+
+
−
=
⇒
+
+
=
2
1
4
1
0
2
2
0
(2)
5) Na podstawie wyników pomiarów, należy wyznaczyć różnice temperatur, wyniki zanotować
w tabeli 2. Należy skomentować otrzymane wyniki.
5. Pom
Term
zastosow
małej po
Term
siłę term
zakresac
typu J (F
określa j
klasa 1 b
Podc
siły term
pomiaro
oraz prz
oceny po
jako tem
Wyk
Cele
warunkie
1) Ter
pom
2) Spo
tem
mie
miar tempera
mopara, czas
wanie zwłasz
ojemności cie
mopara jest
moelektryczn
ch pomiarow
Fe‐CuNi), typ
jego klasa d
błąd graniczn
czas zajęć zo
moelektryczn
owa termopa
ewodów ko
oprawności
mperaturę od
konanie pom
em tego pu
em, że temp
mopary nale
miar siły term
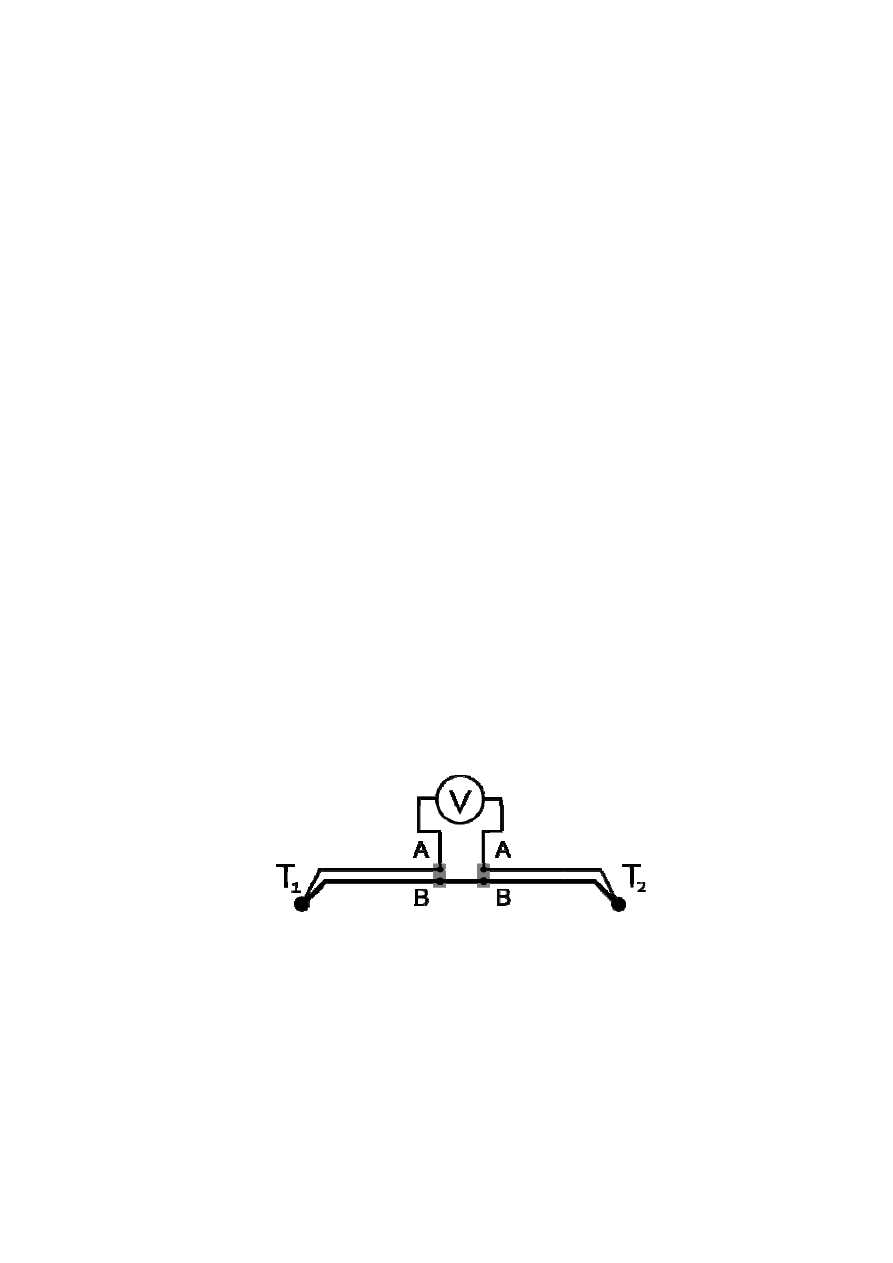
Rysunek 2
ter
oinę odniesie
mperatura te
eszaninie, prz
atury termop
sem nazywa
zcza w przem
eplnej.
przetwornik
ą. Łącząc w
wych oraz ch
pu K (NiCr‐Ni
okładności [
ny wynosi ±1
ostaną użyte
nej. Termop
ary zabezpie
mpensacyjny
pomiarów te
dniesienia (w
miarów
nktu ćwicze
peratura spoi
eży podłączyć
moelektryczn
2 Schemat p
moelektrod,
enia termopa
ej mieszanin
zed pomiare
parą
na również
myśle, dzięki
iem temper
pary różne m
harakterystyk
Al) oraz typu
[9]. Dla term
1.5°C zaś dla
termopary t
pary znajduj
eczona jest
ych (zbudow
emperatury
wzorcową).
enia jest po
iny odniesien
ć do multime
nej (napięcia)
odłączenia t
kolorem sza
ary należy um
y powinna
m należy ją z
termoogniw
i prostej bud
atury, który
metale lub st
kach. Do naj
u T (Cu‐CuNi
mopary typu
klasy 2 błąd
typu J (klasy
ją się w sz
metalową sk
wanych z tak
należy użyć
omiar temp
nia jest znan
etru zgodnie
).
termopar do
arym zaznacz
mieścić w te
być bliska T
zamieszać.
wem lub term
dowie, szero
pod wpływe
topy metali,
jczęściej sto
). Niepewno
J, w zakresi
d graniczny je
1), oraz mul
zczelnych o
kuwką. Do p
kich samych
miernika HI
eratury za
a.
e z rysunkiem
multimetru
zono złącza k
rmosie w któ
T
1
≈0°C. W c
moelemente
kim zakreso
em różnicy t
można uzysk
osowanych p
ość pomiaru k
e temperatu
est równy ±2
timetr Rigol
budowach
połączenia t
stopów jak
98501, a jeg
pośrednictw
m 2 w taki sp
(A,B – oznac
kompensacy
órym znajdu
elu wyrówn
m, znajduje
m pomiarow
temperatur
kać czujniki o
par należą te
konkretnego
ur od ‐40°C d
2.5°C.
DM3051 do
metalowych
termopar uż
termoelektr
go odczyty t
wem termop
posób, by mo
czenia różnyc
yjne)
uje się woda
nania tempe
str. 13
szerokie
wym oraz
generuje
o różnych
ermopara
o czujnika
do 300°C
pomiaru
. Spoina
yto złącz
rody). Do
raktować
pary pod
ożliwy był
ch
z lodem;
ratury w
str. 14
3) Spoinę pomiarową należy umieścić w łaźni wodnej, w której będzie mierzona temperatura T
2
.
Wyniki pomiarów: siły termoelektrycznej oraz temperatury odniesienia (w termosie) mierzonej
miernikiem HI98501, należy zanotować w tabeli.
Tabela 3. Pomiar temperatury wody w łaźni wodnej przy pomocy termopary
Termos
Łaźnia wodna
Temperatura spoiny
odniesienia (
pomiar miernikiem
wzorcowym HI98501
):
T
1
[°C]
Siła termoelektryczna:
E [mV]
Wyznaczona temperatura
spoiny pomiarowej:
T
2
[°C]
Niepewność pomiaru
temperatury:
U(T
2
)
4) Znając temperaturę spoiny odniesienia oraz używając tablic z normy PN‐EN 60584‐1:1995
(strona 50), należy wyznaczyć temperaturę spoiny pomiarowej T
2
. Jeżeli to konieczne do
obliczenia różnicy temperatur spoin termopary na podstawie wartości siły termoelektrycznej
należy skorzystać z interpolacji liniowej (opis znajduje się w punkcie 3 instrukcji).
4) Posługując się normą PN‐60584‐2 wyznaczyć błędy graniczne pomiaru temperatury, a następnie
na tej podstawie niepewność rozszerzoną pomiaru U(T
2
)
dla poziomu ufności p=0.95.
Wskazówka: Błąd graniczny
2
T
gr
Δ
oblicza się na podstawie zależności podanej w normie
w tablicy 1. Na tej podstawie należy obliczyć niepewność standardową typu B
( )
3
2
2
T
T
u
gr
B
Δ
=
i w
końcu niepewność rozszerzoną:
( )
( )
2
2
T
u
k
T
U
B
⋅
=
, gdzie
p
k
⋅
= 3
.
str. 15
6. Pomiar różnicy temperatur termoparą
1) Spoinę pomiarową należy umieścić w łaźni wodnej, natomiast spoinę odniesienia w zlewce
z wodą o temperaturze „pokojowej”.
2) Należy zmierzyć i zanotować w tabeli: temperaturę odniesienia wody w zlewce i łaźni oraz
napięcie.
Tabela 5. Pomiar różnicy temperatur w zlewce i łaźni wykonywany termoparą
Zlewka z wodą
Łaźnia wodna
Spoina odniesienia
mierzy T
1
Spoina pomiarowa
mierzy T
2
Temp. odniesienia (HI98501):
T
0
[°C]
T
01
=
T
02
=
Zmierzona siła
termoelektryczna:
E [mV]
Różnica Temperatur
wyznaczona z siły
termoelektrycznej:
ΔT
E
=f(T
1
‐T
2
)
[°C]
Różnica temperatur
wyznaczona z pomiarów
miernikiem wzorcowym
(HI98501):
ΔT
0
=T
01
‐T
02
[°C]
Błąd bezwzględny pomiaru
różnicy temperatury:
ΔT= ΔT
0
‐ΔT
E
[°C]
3) Na podstawie wartości napięcia E oraz tabel normy PN‐EN 60584‐1:1995, należy wyznaczyć
różnicę temperatur.
4) Następnie należy porównać odczytaną z normy temperaturę z różnicą wskazań obliczoną na
podstawie wskazań termometru HI98501.
5) Należy sformułować wnioski na temat pomiarów różnicy temperatur.
Wyszukiwarka
Podobne podstrony:
Instrukcja do ćw 17 Podnośnik pakietów
cw 20 Instrukcja
ćw 17 Metoda Rungego Kutty
cw 04 instrukcja
cw 11 instrukcja
cw 10 instrukcja do moska Whe Nieznany
cw 16 instrukcja
cw 05 instrukcja id 121376 Nieznany
Ćw. 17, chemia fizyczna, Nowy folder
ćw 17 Układ zasilania aparatu Epsteina do rozdziału strat metodą częstotliwościową
cw 17
cw 17 formularz
PISMO ŚWIĘTE O RODZINI cw 17 10 2014
Cw 17 18 Energia wiatru ver1.1 karta pomiarowa
cw 01 instrukcja
Cw 17 18 Energia wiatru ver1 1 Nieznany
ĆW 17
więcej podobnych podstron