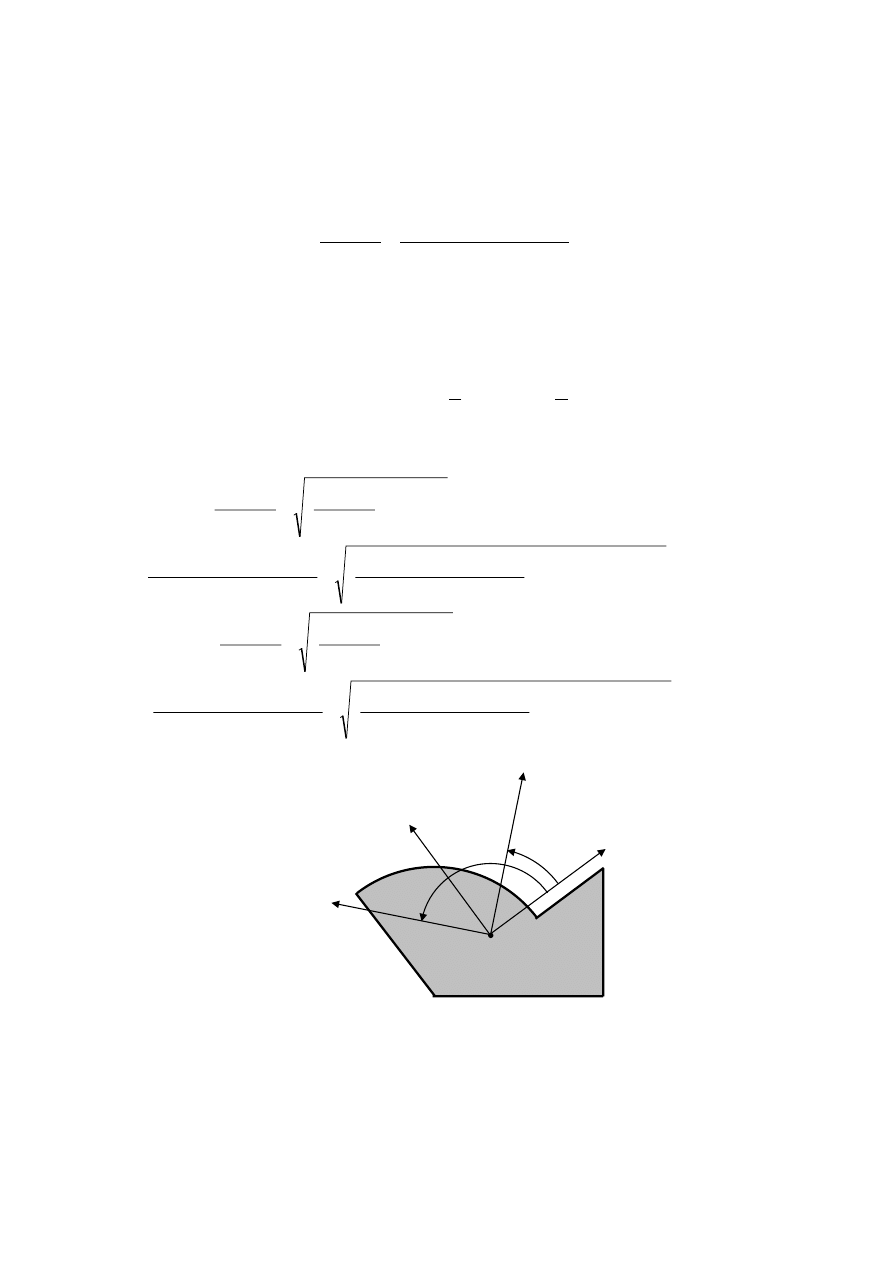
Przykład 2.3. Figura złożona
Polecenie: Wyznaczyć główne centralne momenty bezwładności oraz kierunki główne dla
poniższej figury.
·
4r
3r
·
3r
W celu wyznaczenia środka ciężkości oraz obliczenia wartości momentów
bezwładności i momentu dewiacyjnego przyjmujemy dwa współśrodkowe prostokątne układy
współrzędnych Oxy i Ouv oraz dzielimy rozpatrywaną figurę na dwie figury podstawowe.
v
I
II
3r
α
4r
·
·
x
O
3r
y
u
Z wymiarów zadania wynika, że przeciwprostokątna trójkąta (figura II) ma długość
równą :
( ) ( )
r
r
r
r
5
25
4
3
2
2
2
=
=
+
, a więc
5
3
=
α
sin
,
5
4
=
α
cos
.
3r
3r
4r
·
·
C
1
C
2
v
O
α
II
I
u
y
x
C
2
c
x
2
c
y
1
c
u
1
c
v
Układ współrzędnych Ouv obrócony jest o kąt α względem układu Oxy. Współrzędne
dowolnego punktu spełniają zależności:
u = x cos α + y sin α
v = y cos α − x sin α.
Współrzędne środka ciężkości trójkąta (II figury) w układzie Oxy są równe:
r
r
x~
c
3
8
4
3
2
2
=
⋅
=
,
r
r
y~
c
=
⋅
=
3
3
1
2
zaś w układzie Ouv przyjmują wartości:
r
r
r
u~
c
15
41
5
3
5
4
3
8
2
=
⋅
+
⋅
=
,
r
r
r
v~
c
5
4
5
3
3
8
5
4
2
−
=
⋅
−
⋅
=
Obliczamy pola figur składowych i określamy współrzędne ich środków ciężkości w
układzie Ouv.
( )
2
2
I
4
9
3
4
1
πr
r
π
A
=
⋅
⋅
=
,
π
r
π
r
u~
c
4
3
3
4
1
=
⋅
=
,
π
r
π
r
v~
c
4
3
3
4
1
=
⋅
=
,
2
II
6
3
4
2
1
r
r
r
A
=
⋅
⋅
=
,
r
u~
c
15
41
2
=
,
r
v~
c
5
4
2
−
=
.
Całkowite pole figury wynosi:
2
2
2
II
I
0686
13
6
4
9
r
.
r
πr
A
A
A
=
+
⋅
=
+
=
Moment statyczny względem osi v wynosi:
3
2
2
2
II
1
I
4
25
15
41
6
4
4
9
r
.
r
r
π
r
r
u~
A
u~
A
S
c
c
v
=
⋅
+
⎟
⎠
⎞
⎜
⎝
⎛
⋅
π
=
⋅
+
⋅
=
Moment statyczny względem osi u wynosi:
3
2
2
2
II
1
I
2
4
5
4
6
4
4
9
r
.
r
r
π
r
r
v~
A
v~
A
S
c
c
u
=
⎟
⎠
⎞
⎜
⎝
⎛−
⋅
+
⎟
⎠
⎞
⎜
⎝
⎛
⋅
π
=
⋅
+
⋅
=
Współrzędne środka ciężkości rozpatrywanej figury w układzie Ouv wynoszą
odpowiednio:
r
.
r
.
r
.
A
S
u~
v
c
9436
1
0686
13
4
25
2
3
=
=
=
oraz
r
.
r
.
r
A
S
v~
u
c
3214
0
0686
13
2
.
4
2
3
=
=
=
.
3r
3r
4r
·
·
C
1
C
2
v
α
II
I
u
y
x
C
c
u
c
v
2
c
y
2
c
x
Wyznaczymy momenty bezwładności i moment dewiacyjny dla obu figur składowych
w układzie osi Ouv. Dla pierwszej figury (ćwiartka koła) mamy
( )
4
4
I
I
904
15
3
16
1
r
.
r
π
I
I
v
u
=
⋅
⋅
=
=
,
( )
4
4
I
125
10
3
8
1
r
.
r
I
uv
=
⋅
=
.
Dla drugiej figury (trójkąt) obliczenia przeprowadzimy w układzie osi Oxy.
2
( )
4
3
II
9
3
4
12
1
r
r
r
I
x
=
⋅
⋅
=
W celu wyznaczenia momentu bezwładności względem osi y figury II, przedstawimy
ją jako różnicę dwu figur, zgodnie z poniższym rysunkiem.
y
x
O
4r
O
4r
y
3r
x
( )
( )
4
3
3
II
48
4
3
12
1
4
3
3
1
r
r
r
r
r
I
y
=
⋅
⋅
−
⋅
⋅
=
Moment dewiacyjny figury II w układzie Oxy wyznaczymy korzystając z twierdzenia
Steinera
( ) ( )
4
2
2
2
II
II
18
3
8
6
3
4
72
1
2
2
r
r
r
r
r
r
y~
x~
A
I
I
c
c
II
y
x
xy
c
c
=
⋅
⋅
+
⋅
⋅
=
⋅
⋅
+
=
.
Momenty bezwładności i moment dewiacyjny figury II w obróconym układzie Ouv
wyznaczamy z zależności:
4
4
4
4
II
2
II
2
II
76
5
5
3
5
4
18
25
9
48
25
16
9
2
r
.
r
r
r
cos
sin
I
sin
I
cos
I
I
xy
y
II
x
u
=
⋅
⋅
−
⋅
+
⋅
=
α
α
−
α
+
α
=
4
4
4
4
II
2
II
2
II
II
24
51
5
3
5
4
18
25
9
9
25
16
48
2
r
.
r
r
r
cos
sin
I
sin
I
cos
I
I
xy
x
y
v
=
⋅
⋅
+
⋅
+
⋅
=
α
α
+
α
+
α
=
(
)
(
)
(
)
4
4
4
4
2
2
II
II
II
II
68
13
25
9
25
16
18
5
4
5
3
48
9
r
.
r
r
r
sin
cos
I
cos
sin
I
I
I
xy
y
x
uv
−
=
⎟
⎠
⎞
⎜
⎝
⎛
−
⋅
+
⋅
⋅
−
=
=
α
−
α
+
α
α
−
=
Momenty bezwładności i moment dewiacyjny rozważanej figury, będącej sumą figury
I i II, w obróconym układzie Ouv obliczymy jako sumy momentów dla figur składowych.
4
4
4
II
I
664
21
76
5
904
15
r
.
r
.
r
.
I
I
I
u
u
u
=
+
=
+
=
4
4
4
II
I
144
67
24
51
904
15
r
.
r
.
r
.
I
I
I
v
v
v
=
+
=
+
=
4
4
4
II
I
555
3
68
13
125
10
r
.
r
.
r
.
I
I
I
uv
uv
uv
−
=
−
=
+
=
.
Momenty bezwładności i moment dewiacyjny trójkąta w obróconym układzie Ouv
możemy obliczyć bez konieczności transformowania ich przez obrót układu. Trójkąt można
podzielić na dwa trójkąty prostokątne, których boki przyprostokątne są równoległe do osi
układu Ouv zgodnie z poniższym rysunkiem.
5
3
=
α
sin
,
5
4
=
α
cos
r
r
α
sin
r
h
5
12
5
3
4
4
=
⋅
=
⋅
=
r
r
α
cos
r
b
5
16
5
4
4
4
2
=
⋅
=
⋅
=
3
r
r
α
sin
r
b
5
9
5
3
3
3
3
=
⋅
=
⋅
=
3r
h
4r
· ·
C
3
C
2
v
α
III
u
y
x
2
c
u
2
c
v
3
c
u
3
c
v
2
b
3
b
II
Pola powierzchni figury II i III oraz współrzędne ich środków ciężkości w obróconym
układzie Ouv wynoszą
2
2
II
25
96
5
12
5
16
2
1
2
1
r
r
r
h
b
A
=
⋅
⋅
=
⋅
⋅
=
,
2
3
III
25
54
5
12
5
9
2
1
2
1
r
r
r
h
b
A
=
⋅
⋅
=
⋅
⋅
=
r
r
b
u~
c
15
32
5
16
3
2
3
2
2
2
=
⋅
=
⋅
=
r
r
r
b
b
u~
c
5
19
5
9
3
1
5
16
3
1
3
2
3
=
⋅
+
=
⋅
+
=
r
r
h
v~
v~
c
c
5
4
5
12
3
1
3
1
3
2
−
=
⋅
−
=
⋅
−
=
=
Momenty bezwładności i moment dewiacyjny trójkąta, będącego sumą trójkątów II i
III, w obróconym układzie Ouv obliczymy jako sumy momentów dla figur składowych.
(
)
4
4
3
3
3
2
III
II
76
5
25
144
5
12
5
12
1
12
1
r
.
r
r
r
h
b
b
I
I
u
u
=
=
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⋅
⋅
=
⋅
+
⋅
=
+
4
2
2
3
2
2
3
2
3
III
III
3
2
2
II
II
2
III
II
r
24
51
5
19
25
54
5
9
5
12
36
1
15
32
25
96
5
16
5
12
36
1
.
r
r
r
r
r
r
r
r
u~
A
I
u~
A
I
I
I
c
c
v
c
c
v
v
v
=
⎟
⎠
⎞
⎜
⎝
⎛
⋅
+
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⋅
+
⎟
⎠
⎞
⎜
⎝
⎛
⋅
+
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⋅
=
=
⋅
+
+
⋅
+
=
+
4
2
2
2
2
2
2
3
3
III
III
2
2
II
II
III
II
68
13
5
4
5
19
25
54
5
12
5
9
72
1
5
4
15
32
25
96
5
12
5
16
72
1
3
3
2
2
r
.
r
r
r
r
r
r
r
r
r
r
v~
u~
A
I
v~
u~
A
I
I
I
c
c
v
u
c
c
v
u
uv
uv
c
c
c
c
−
=
=
⎟
⎠
⎞
⎜
⎝
⎛−
⋅
⋅
+
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⎟
⎠
⎞
⎜
⎝
⎛
⋅
+
⎟
⎠
⎞
⎜
⎝
⎛−
⋅
⋅
+
⎟
⎠
⎞
⎜
⎝
⎛
⋅
⎟
⎠
⎞
⎜
⎝
⎛
⋅
−
=
=
⋅
⋅
+
+
⋅
⋅
+
=
+
Momenty bezwładności i moment dewiacyjny rozważanej figury, będącej sumą figury
I, II i III w obróconym układzie Ouv obliczymy jako sumy momentów dla figur składowych.
4
4
4
III
II
I
664
21
76
5
904
15
r
.
r
.
r
.
I
I
I
I
u
u
u
u
=
+
=
+
+
=
4
4
4
III
II
I
144
67
24
51
904
15
r
.
r
.
r
.
I
I
I
I
v
v
v
v
=
+
=
+
+
=
4
4
4
III
II
I
555
3
68
13
125
10
r
.
r
.
r
.
I
I
I
I
uv
uv
uv
uv
−
=
−
=
+
+
=
.
Otrzymane wyniki są identyczne z uzyskanymi przy zastosowaniu podziału na dwie
figury składowe.
Osiowe momenty bezwładności oraz dewiacyjny moment figury względem osi
centralnych
wyznaczymy korzystając z przekształconych wzorów Steinera:
c
c
v
u
(
)
4
2
2
4
2
3140
20
3214
0
0686
13
664
21
r
.
r
.
r
.
r
.
v~
A
I
I
c
u
u
c
=
⋅
−
=
⋅
−
=
4
(
)
4
2
2
4
2
7763
17
9436
1
0686
13
144
67
r
.
r
.
r
.
r
.
u~
A
I
I
c
v
v
c
=
⋅
−
=
⋅
−
=
r
.
r
.
r
.
r
.
r
.
v~
u~
A
I
I
c
c
uv
v
u
c
c
4
2
4
7186
11
3214
0
9436
1
0686
13
555
3
−
=
⋅
⋅
−
−
=
⋅
⋅
−
=
.
Kąt φ
o
między osiami prostokątnego układu
i układu głównych osi bezwładności
spełnia równanie:
c
c
v
u
(
)
2356
9
7763
17
3140
20
7186
11
2
2
2
4
4
4
o
.
r
.
r
.
r
.
I
I
I
tg
c
c
c
c
v
u
v
u
=
−
−
⋅
−
=
−
−
=
ϕ
stąd
, a więc
.
rad
4629
1
2
o
.
=
ϕ
rad
7315
0
o
.
=
ϕ
Główna oś bezwładności, względem której moment bezwładności ma wartość
tworzy z osią
kąt
, natomiast główna oś bezwładności, względem której
moment bezwładności ma wartość
max
I
I
=
1
c
u
1
ϕ
min
I
I
=
2
tworzy z osią kąt
c
u
2
ϕ
.
c
u
I >
to
, a
c
v
I
rad
7315
0
o
1
.
=
ϕ
=
ϕ
rad
3023
2
rad
2
7315
0
2
o
2
.
.
=
⎟
⎠
⎞
⎜
⎝
⎛
π
+
=
π
+
ϕ
=
ϕ
Momenty bezwładności względem głównych osi bezwładności
osiągają wartości
ekstremalne:
c
c
v
u
(
)
4
2
4
2
4
4
4
4
2
2
1
8322
30
7186
11
2
7763
17
3140
20
2
7763
17
3140
20
2
2
r
.
r
.
r
.
r
.
r
.
r
.
I
I
I
I
I
I
I
c
c
c
c
c
c
v
u
v
u
v
u
max
=
−
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
+
=
=
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
+
=
=
(
)
4
2
4
2
4
4
4
4
2
2
2
2581
7
7186
11
2
7763
17
3140
20
2
7763
17
3140
20
2
2
r
.
r
.
r
.
r
.
r
.
r
.
I
I
I
I
I
I
I
c
c
c
c
c
c
v
u
v
u
v
u
min
=
−
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
+
=
=
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
+
=
=
Kierunek maksymalnego
momentu bezwładności
C
Kierunek minimalnego
momentu bezwładności
1
ϕ
2
ϕ
c
u
c
v
5
Wyszukiwarka
Podobne podstrony:
Figura złożona
analiza złożonych aktów ruchowych w sytuacjach patologicznych
Złożone konstrukcje metalowe
Złożone przyrządy
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Inny świat – hołd złożony człowiekowi i dokument degradacji człowieka, język polski
biegus, konstrukcje metalowe podstawy, Słupy złożone
złożoność algorytmów
Algorytmy i złożono ć cz V
Algorytmy i złożono ć cz VI
POPRAWIONE RYSUNKI ZłOŻONIOWY A1
Zespół10 akcesoria złożony Arkusz
23 Układ belkowy złożony
Złożone konstrukcje betonowe II
znieczulenie ogólne złożone
zlozon, Algorytmy
więcej podobnych podstron