1. Pojęcia podstawowe : sterowanie w układzie otwartym, zamkniętym, obiekt stacjonarny
i niestacjonarny, statyczny i dynamiczny, liniowy i nieliniowy, optymalny, nieoptymalny,
jedno- i wielowymiarowy
W sterowaniu w układzie zamkniętym występuje sprzężenie zwrotne. Pojęciem tym
określone jest działanie wsteczne wielkości regulowanej na wielkość regulującą. Czyli
inaczej mówiąc działanie na wielkości regulującej jest spowodowane zmianą wielkości
regulowanej.
Sterowanie w układzie otwartym różni się tym, że człowiek lub regulator nie posiada
informacji poprzez sprzężenie zwrotne o stanie wielkości regulowanej (wyjściowej)
Obiekt stacjonarny obiekt niezmieniający swoich własności w czasie tj. współczynniki nie
zależą od czasu
Obiekt niestacjonarny – własności obiektu zmieniają się w czasie a
i
= a
i
(t), b
i
= b
i
(t).
Obiekt dynamiczny- zmienne w równaniu obiektu zależą od czasu
Obiekt statyczny - zmienne w równaniu obiektu NIE zależą od czasu
Układ liniowy – funkcja, która spełnia dwie zasady
Superpozycji (składania) funkcji
Homogeniczności:
Powyższe własności można ująć w jeden warunek liniowości: Jeśli dane są dwa sygnały
wejściowe
i odpowiadające im sygnały wyjściowe
wówczas dla dowolnych wartości skalarnych
układ liniowy musi spełniać następującą zależność:
Funkcja nieliniowa – taka, która nie jest liniowa. Nie spełnia ona zasady superpozycji lub
homogeniczność
Optymalny model obiektu – minimalizuje lub maksymalizuje zadane kryterium jakości.
Metoda najmniejszych kwadratów minimalizuje kryterium
Q
– „odległość” pomiędzy znanymi n
punktami
f
(
x
i
) a przyjętą funkcją
.
..
.
1
2
3
1
2
(
,
,
,...,
,
,...)
0
F a y a y a y
b u b u
1
1
(
, 0, 0,...,
, 0,...)
0
F a y
b u
1
1
(
,
)
0
F a y b u
1
2
1
2
(
)
( )
( )
F u
u
F u
F u
(
)
( )
F ku
kF u

Jedno wejście u(t) i jedno wyjście y(t)
Dwa wejścia u
1
(t), u
2
(t) i jedno wyjście y(t)
T, k, k
1
, k
2
– stałe liczby
O układzie wielowymiarowym mówi się w przypadkach, gdy układ ma wiele zmiennych (często,
jest to też układ o wielu wejściach i/lub wielu wyjściach jednak niekoniecznie, gdyż część
zmiennych mogą stanowić zmienne stanu)
2. Układ automatycznej regulacji
Przypatrzmy się dokładniej jednoobwodowemu układowi stabilizacji automatycznej
(rys. 1.4). W schemacie tym można wyodrębnić podstawowe części składowe
występujące w każdym układzie regulacji automatycznej.
Urządzenie, albo zespół urządzeń, w których przebiega interesujący nas proces
technologiczny, nazywamy obiektem regulacji. Pojęcie obiektu regulacji jest
bardzo ogólne: może to być reaktor chemiczny, piec, silnik elektryczny, zbiornik
itd. Ponieważ w układzie regulacji interesuje nas przebieg procesu technologicznego,
często na schematach blokowych jako przedmiot oddziaływania układu
regulacji przedstawiany jest właśnie proces.
O tym, jak ma przebiegać proces technologiczny, mówią nam wielkości fizyczne
charakterystyczne dla danego procesu. Może to być ciśnienie, temperatura,
strumień (natężenie przepływu) itp. Ta wielkość fizyczna, która najlepiej odzwierciedla
przebieg procesu i której wartość
należy utrzymać na określonym
poziomie (stałym lub zmieniającym i
się), aby proces przebiegał prawidłowo,
nazywa się wielkością regulowaną.
W naszym przykładzie wielkością
regulowaną jest temperatura. Często
zdarza się, że w jednym obiekcie jest
kilka wielkości regulowanych. W
skomplikowanych przypadkach,
szczególnie przy regulacji procesów
chemicznych, buduje się układy regulacji
z wieloma wzajemnie zależnymi
wielkościami regulowanymi.
Wartość wielkości regulowanej mierzona jest przez urządzenie pomiarowe. Sygnał
wyjściowy z tego urządzenia stanowi dla układu regulacji informację, jaka
jest wartość rzeczywista, czyli wartość wielkości regulowanej w danej chwili.
Centralnym urządzeniem układu regulacji jest regulator. Jak wiemy, zadaniem f
układu regulacji jest utrzymywanie wartości wielkości regulowanej możliwie i
zbliżonej do wartości żądanej, gwarantującej najkorzystniejszy przebieg procesu
technologicznego. Wartość pożądana wielkości regulowanej, nazywana wartoś- |
cią zadaną, wytwarzana jest przez nadajnik wartości zadanej (zadajnik) stanowiący
często część regulatora. W regulatorze następuje porównanie wartości rzeczy- |
wistej z wartością zadaną i wytworzenie sygnału oddziałującego na obiekt w taki .
sposób, aby różnicę między wartością rzeczywistą a wartością zadaną sprowa- ł
dzić do zera. I
Oddziaływanie regulatora na przebieg procesu technologicznego odbywa się za |
pośrednictwem urządzenia wykonawczego, w którym można wyodrębnić element |
Obiekt
Obiekt
Obiekt o jednym wejściu i jednym wyjściu (SISO)
Obiekt o wielu wejściach i wielu wyjściach (MIMO)
.
( )
( )
( )
T y t
y t
ku t
.
1 1
2 2
( )
( )
( )
( )
T y t
y t
k u t
k u t
nastawczy i siłownik. Element nastawczy steruje wartością wielkości fizycznej |
nazywanej wielkością sterującą (nastawiającą). Wielkością sterującą może być [
czynnik mający decydujący wpływ na przebieg sterowanego procesu technologi- |
cznego. Najczęściej czynnikiem tym jest strumień materiału lub energii i dlatego I
najczęściej spotykanym elementem nastawczym jest zawór. Siłownik (element ?
napędowy) zapewnia uzyskanie siły niezbędnej do przestawiania elementu nasta- |
wczego. W układach, w których zmian wielkości sterującej dokonuje się inaczej |
niż przez zmiany położenia elementu mechanicznego, miejsce siłownika zajmuje wzmacniacz
mocy. Tak jest np. w serwomechanizmach.
3. Transformata Laplace’a, transmitancja
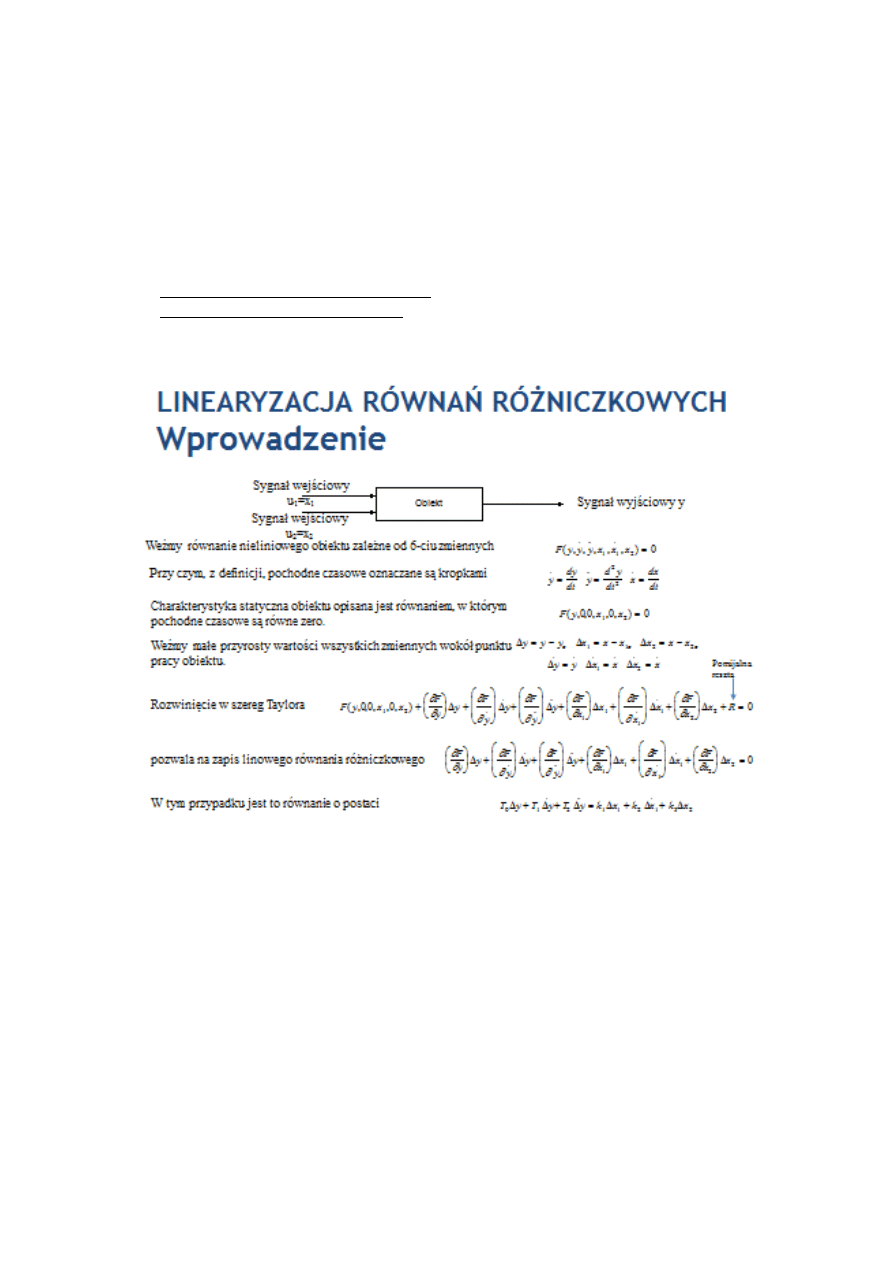
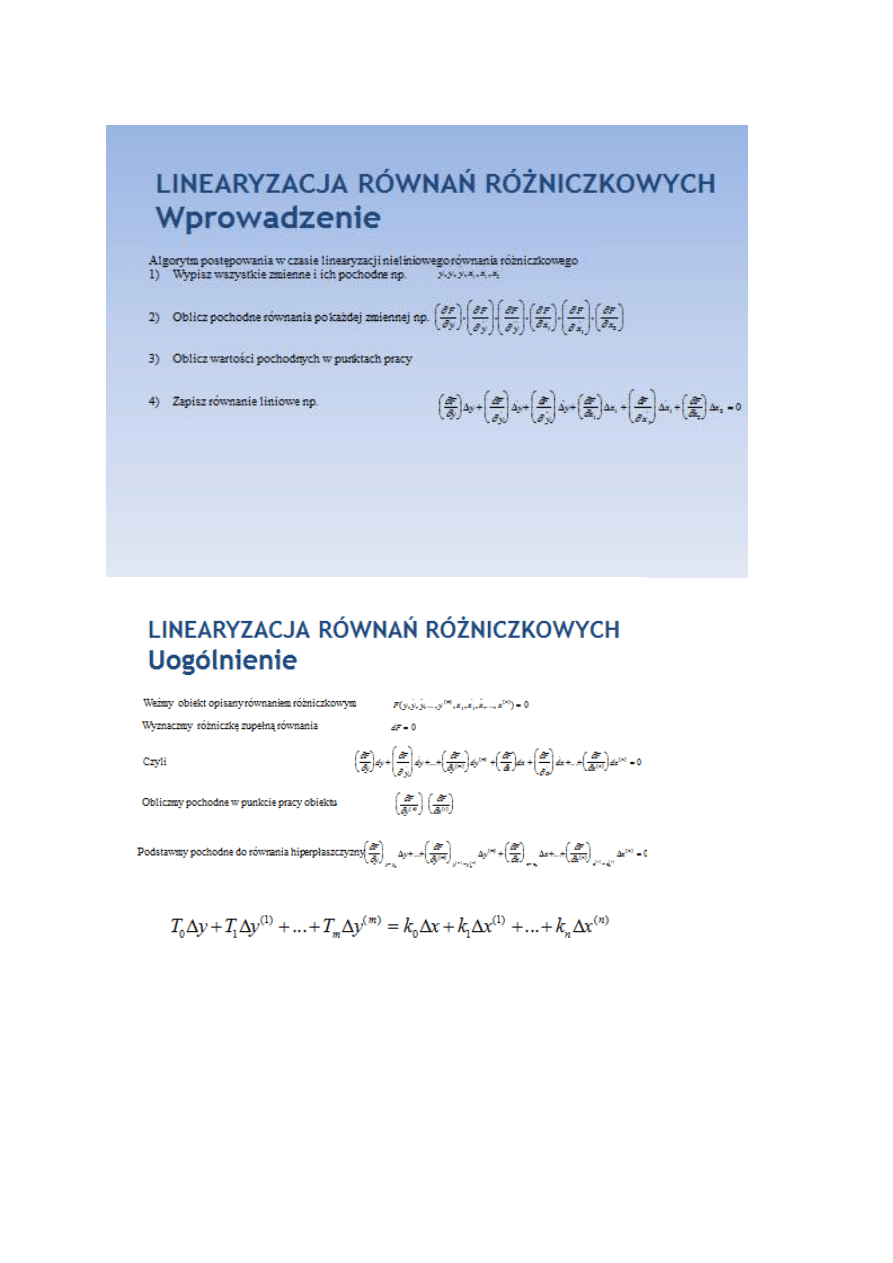
4. Linearyzacja równań nieliniowych
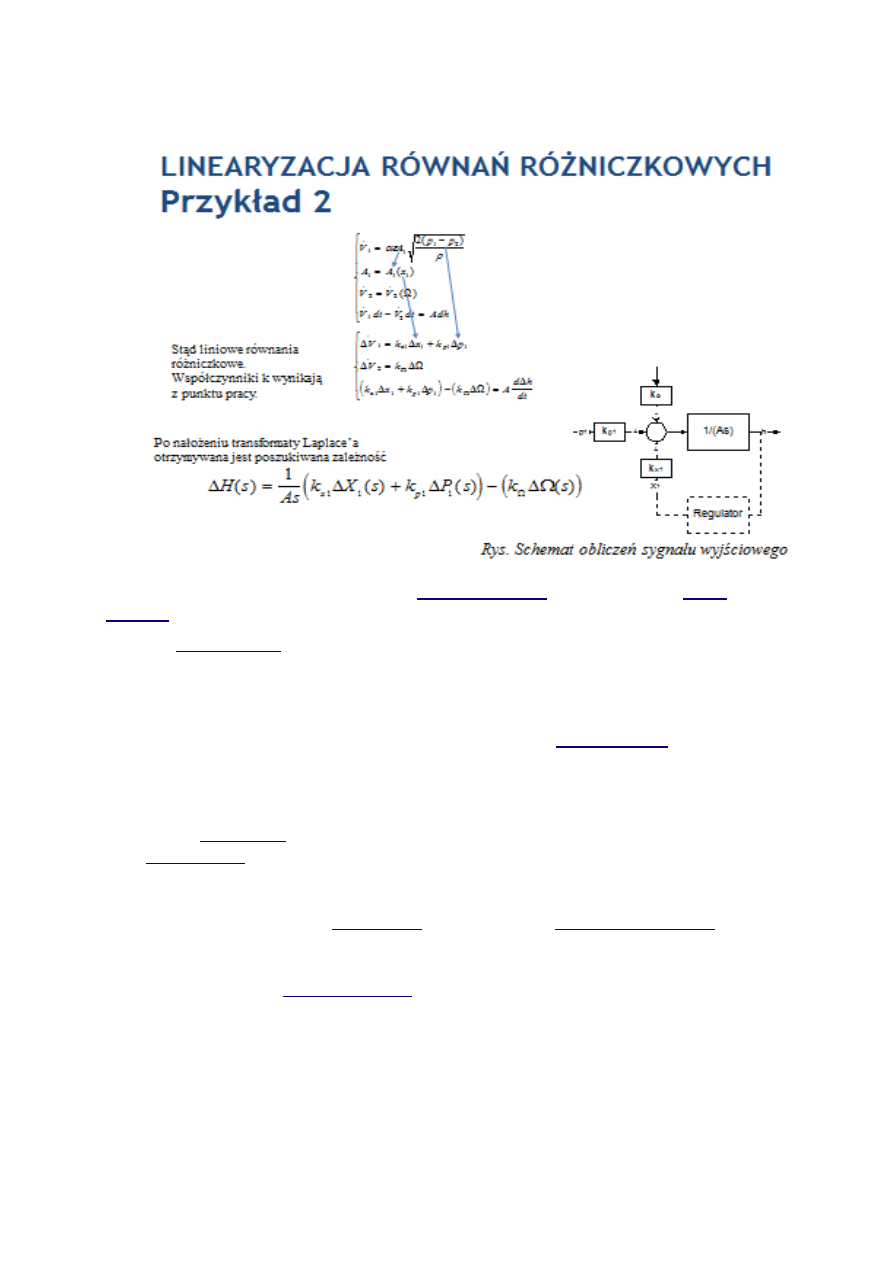
Linearyzacja -
można poddać linearyzacji. Może się także okazać, że nie istnieje stan
równowagi, wokół którego można by dokonać rozsądnej linearyzacji. Żądania: odpowiedniej
dokładności przybliżenia i odpowiednio szerokiego zakresu, dla którego ono ma obowiązywać, często
bywają przeciwstawne.
Szczególnie podatne dla idei linearyzacji są układy z nieliniowością
Do podstawowych metod linearyzacji należą:
metoda rozwinięcia w szereg - badając układ nieliniowy przy założeniu małych odchyleń od
pewnego
układu (np. jego stanu równowagi) można rozwinąć funkcje nieliniowe
, pominąć człony nieliniowe (czyli wyrazy wyższych rzędów) i otrzymać w ten
sposób równania przybliżone liniowe;
metoda linearyzacji optymalnej -
polega na takim doborze elementów macierzy (czyli
) który minimalizuje
pomiędzy
układem nieliniowym a dobranym w ten sposób modelem liniowym;
metoda nieliniowego sprzężenia zwrotnego - w metodzie tej odpowiednio zamienia się zmienne i
dobiera się nieliniowe
6) Charakterystyki częstotliwościowe
Co to jest? Odpowiedź obiektu w stanie ustalonym na sinusoidalny sygnał wejściowy. Po co?
Dokładnie identyfikują obiekt (określają jego własności dynamiczne)
Potrzebne do doboru nastaw regulatorów – układ regulacji musi posiadać odpowiednią jakość
np. w samochodzie nie mogą być odczuwalne drgania od drogi (aktywne zawieszenie w
samochodzie. Wpływ drgań typowej drogi z dziurami na komfort jazdy kierowcy)
W samojezdnych robotach – wpływ drgań drogi na zmianę kierunku jazdy
Pokazują jak zachowuje się obiekt, jeżeli wzrasta częstotliwość sygnałów wejściowych.
Przykład cieplny – budynek i zmiana temperatury powietrza zewnętrznego.
W ten sposób można określić zakres częstotliwości sygnałów, dla których regulacja ma pożądaną
jakość.
Pozwalają na określenie częstotliwości rezonansowej.
Można za ich pomocą badać stabilność układu regulacji.
Typy wykresów:
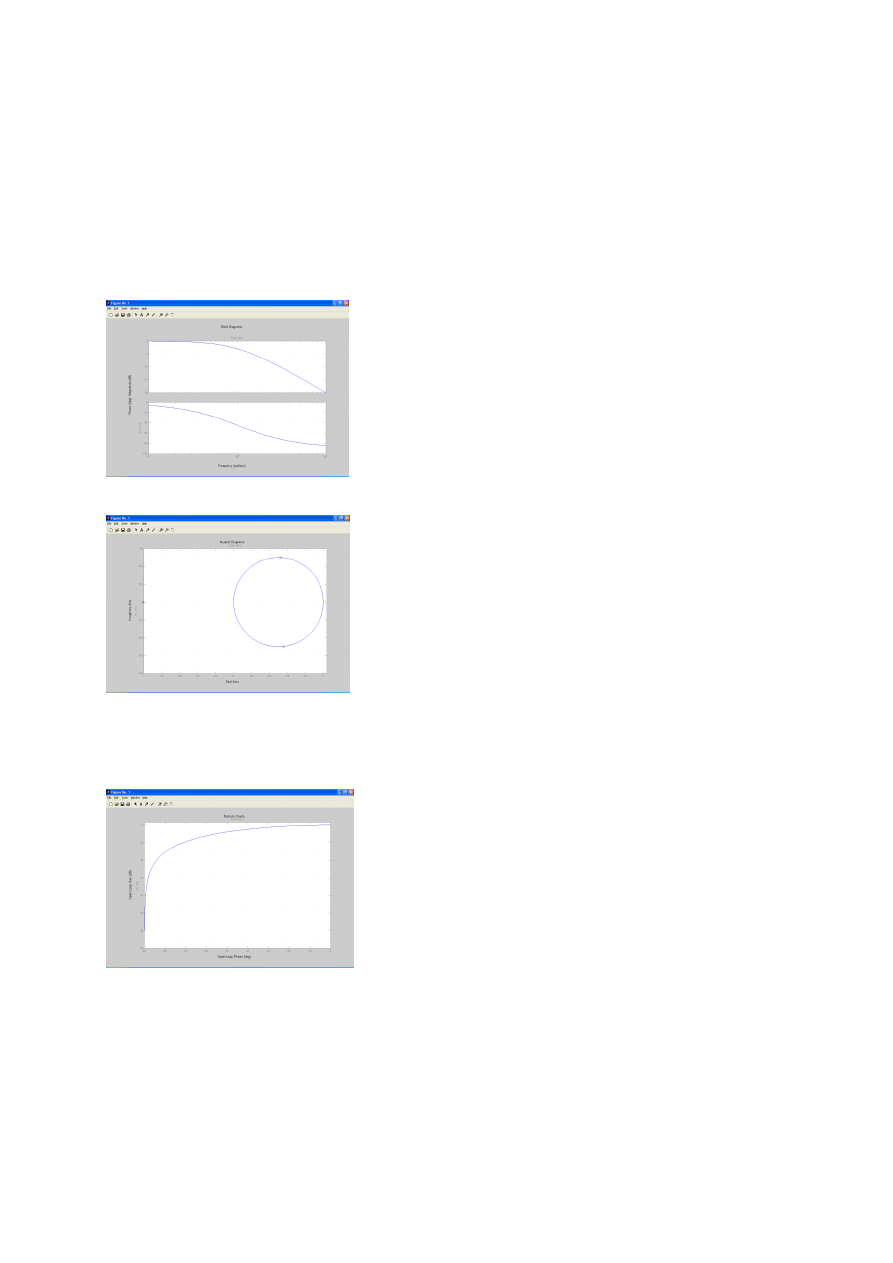
Wykres Bodego, 1927, przedstawia na dwóch różnych rysunkach zależność kąta przesunięcia
fazowego
od pulsacji
oraz modułu M od pulsacji
=
(
), M=M (
)
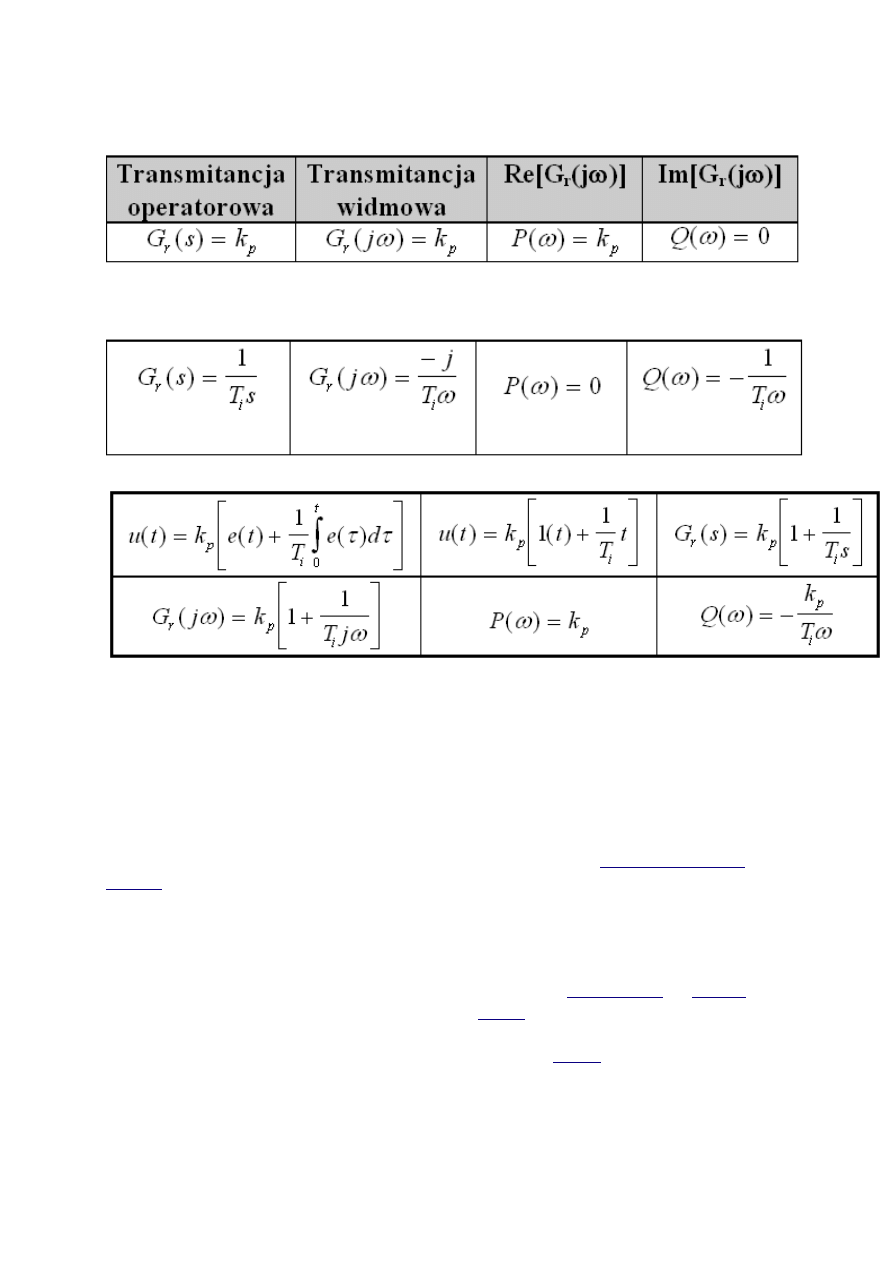
Wykres Nyquista – potraktujmy pulsację
jako parametr i narysujmy zależność (( M(
),
(
) )
we współrzędnych biegunowych
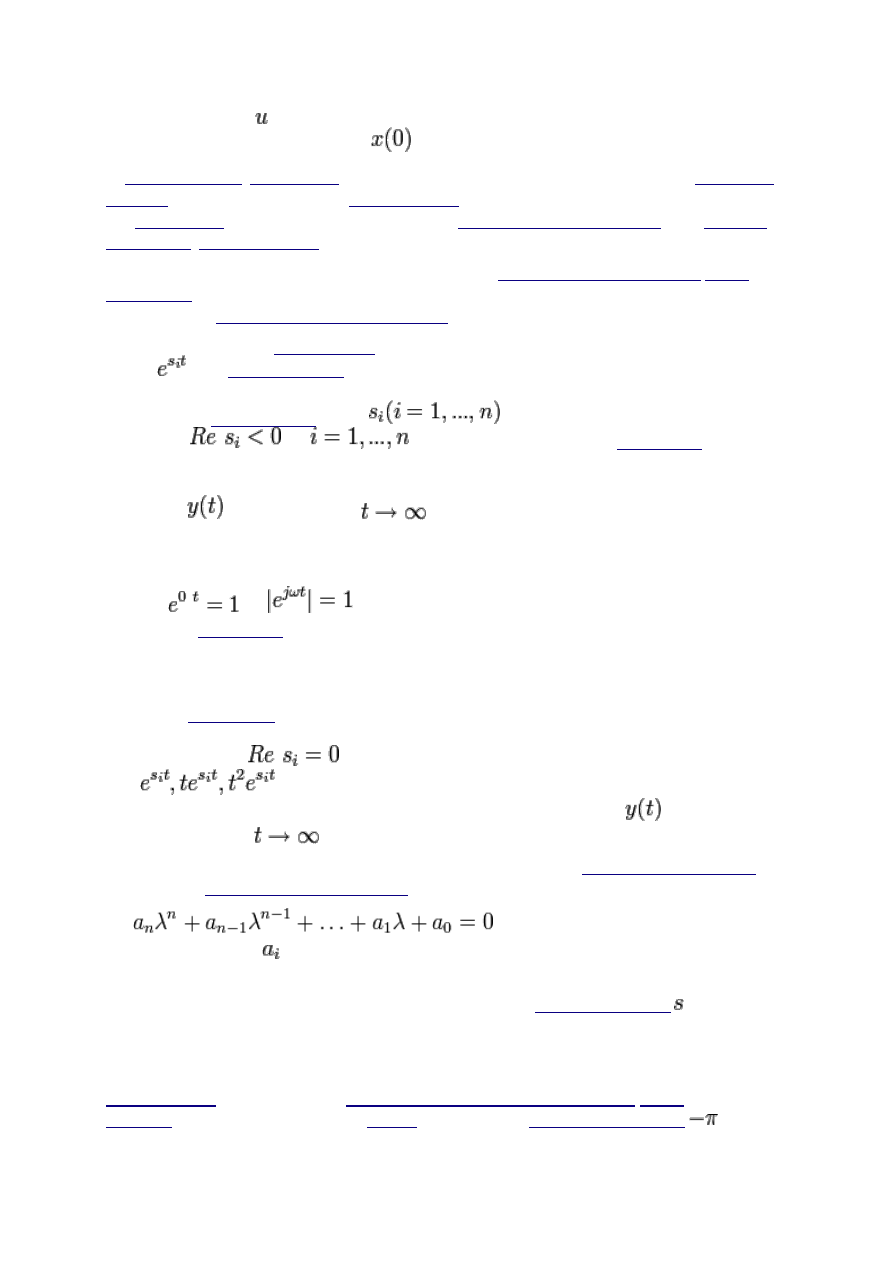
Wykres Nicholsa jest zależnością pomiędzy modułem M wyrażonym w dB i kątem przesunięcia
fazowego w stopniach. Karta Nicholsa pozwala na ocenę zapasu amplitudy i fazy, odległość
modułu układu zamkniętego od 1 oraz wartość modułu rezonansowego (patrz: wykres Bodego)
na podstawie charakterystyki częstotliwościowej układu otwartego.
Są trzy zmienne
, M ,
. W zależności od tego, która zmienna jest parametrem tego jest wykres.
Wykres Nyquista
( |G (
) |,
(
) ) = (( M(
),
(
) )
(wykres we współrzędnych biegunowych)
Wykres Bodego
=
(
) oraz M=M (
)
Wykres Nicholsa
M (
(
)), dB
Wykres Blacka M(
(
))
(wykres we współrzędnych kartezjańskich)
Charakterystyki członów podstawowych
Człon proporcjonalny
Człon całkujący
Człon proporcjonalno-całkujący
Obiekty nieminimalnofazowe
Def. Obiekt minimalnofazowy to taki, którego zera i bieguny znajdują się po lewej stronie
półpłaszczyzny Gaussa
Są to obiekty łatwe w regulacji.
Def. Obiekt nieminimalnofazowy to taki, który ma co najmniej jedno zero lub biegun znajdują się
po
prawej stronie półpłaszczyzny Gaussa
8. Stabilność układu regulacji
Stabilność układu automatycznej regulacji – niezbędny warunek pracy
mówiący o tym, że układ po wyprowadzeniu go ze stanu równowagi sam powraca do tego
stanu. Ponieważ stan równowagi może być różnie interpretowany stosuje się także definicję
stabilności Laplace'a, która mówi, że układ liniowy jest stabilny, jeżeli jego odpowiedź na wymuszenie
(zakłócenie) o ograniczonej wartości jest ograniczona. Stabilność to jedna z najważniejszych
właściwości systemów dynamicznych. Istnieje wiele interpretacji pojęcia stabilności, które w zasadzie
są równoważne dobrze znanym pojęciom matematycznym, takim jak
Układ dynamiczny nazywamy stabilnym, gdy trajektorie
są ograniczone albo gdy zależą one w
sposób ciągły od stanów początkowych lub sterowań. Pojęcie stabilności układu można również
definiować poprzez stawianie odpowiednich wymagań trajektoriom
układu.
Większość definicji stabilności odwołuje się do pojęcia punktu/stanu równowagi. Najczęściej
spotykane definicje stabilności odnoszą się do układów opisywanych równaniem różniczkowym - mówi
się wówczas o stabilności poszczególnych rozwiązań równania różniczkowego otrzymanych przy
ustalonym sterowaniu
, przy czym przez stabilność rozwiązania rozumie się ciągłą zależność tego
rozwiązania od warunku początkowego
.
istnieje jednoznaczny związek między stabilnością a
najprościej można orzec, znając
jego
lub znając położenie pierwiastków
układu).
Krótko mówiąc aby układ był stabilny wszystkie pierwiastki
powinny mieć ujemne części rzeczywiste, czyli znajdować się w lewej
płaszczyzny zmiennej zespolonej s
pojawiają się składniki zawierające
wyrazy
) dlatego:
układu
mają ujemne części
rzeczywiste
dla
to układ jest stabilny. Ponadto
asymptotycznie
wtedy i tylko wtedy, gdy wszystkie bieguny transmitancji leżą w lewej półpłaszczyźnie
zmiennej zespolonej s (tzn. mają ujemną część rzeczywistą). W tym przypadku składowa przejściowa
odpowiedzi
zanika do zera przy
.
Jeśli występują wartości własne o zerowych częściach rzeczywistych (a więc rzeczywiste zerowe lub
czysto urojone) to układ pozostaje stabilny jeśli te wartości są pojedyncze. Wynika to z ograniczoności
wyrażeń
lub
. Nie zachodzi tu jednak warunek stabilności asymptotycznej.
jest na granicy stabilności, jeżeli jeden jego biegun leży na osi urojonej, a
reszta biegunów - w lewej półpłaszczyźnie zmiennej zespolonej.
Jeśli choć jedna wartość własna układu ma dodatnią część rzeczywistą to układ jest
niestabilny.
jest niestabilny, jeżeli co najmniej jeden jego biegun leży w prawej
półpłaszczyźnie zmiennej zespolonej s lub więcej niż jeden biegun znajduje się na osi urojonej. Jeśli
wartość własna przy
jest wielokrotna, to w rozwiązaniu pojawiają się człony
typu
, itd., w zależności od krotności wartości własnej, co sprawia że rozwiązania
stają się nieograniczone. W tym przypadku składowa przejściowa odpowiedzi
rośnie do
nieskończoności przy
.
Kryterium stabilności Hurwitza jest metodą pozwalającą określić
układu
o współczynnikach
rzeczywistych.
Z punktu widzenia algebry kryterium Hurwitza pozwala sprawdzić, czy wszystkie pierwiastki
równania charakterystycznego leżą w lewej półpłaszczyźnie
, co pociąga za
sobą stabilność układu
Kryterium logarytmiczne Nyquista
logarytmiczna charakterystyka amplitudowa
.
2) kryteria graficzne -
stosowane w przypadku znajomości analitycznej postaci transmitancji układu
Transformata Z (transformata Laurenta) jest odpowiednikiem
Powiązanie z transformatą Fouriera
Transformata Z stanowi uogólnienie
dyskretnej transformaty Fouriera
. Dyskretna transformata
Fouriera może być określona przez określenie wartości transformaty Z
dla
lub
innymi słowy określenie jej wartości na
układu wartość transformaty Z musi być określona na okręgu jednostkowym, co
oznacza, że obszar zbieżności układu musi zawierać okrąg jednostkowy. W przeciwnym
przypadku dyskretna transformata Fouriera nie istnieje.
Transformatą Z dyskretnej (impulsowej) funkcji czasu
jest nazywana funkcja
określona wzorem
,
gdzie:
– transformata oryginału;
– oryginał dyskretny;
.
Transformaty Z istnieją dla funkcji dyskretnych, które nie rosną szybciej niż
, np. dla funkcji
lub
nie istnieją
transformaty Z, ponieważ nie spełniają one powyższego warunku.
Historia transformaty Z:
Zasadnicza idea transformaty znanej dziś jako transformata Z była znana jeszcze przez
. W
roku transformatę wprowadził ponownie
jako dogodną metodę
rozwiązywania liniowych równań różniczkowych o stałych współczynnikach. W
w zespole na
nadali jej nazwę transformaty Z.
Nazwa transformata Z
może pochodzić od litery "z" jako dyskretnej wersji litery "s" często używanej
jako zmienna ni
ezależna w
co wydaje się zasadne jako, że transfomata Z jest
w istocie dyskretną wersją transformaty Laplace'a. Inne możliwe pochodzenie to litery "z" w
nazwiskach badaczy (Ragazzini, Zadeh) którzy opublikowali fundamentalny artykuł na jej temat. Tym
niemniej nazwa odbiega od powszechie przyjętej konwencji praktykowanej w świecie nauki by do
metod lub twierdzeń stosować nazwy związane z ich pierwszymi badaczami (na przykład transformata
Fouriera, transformata Laplace'a, transformata Hartley'a, itp).Nieco później E.I. Jury wprowadził i
spopularyzował
.Idea zawarta w transformacie Z w literaturze
matematycznej znana jest jako metoda
, która to datuje się na rok
w powiązaniu z teorią prawdopodobieństwa.
Z matematycznego punktu widzenia transformatę Z można także traktować jako
gdzie występuje szereg liczb jako rozwinięcie (Laurenta) funkcji analitycznej.

Wyszukiwarka
Podobne podstrony:
automaty opracowane grup PA ,,PA itd
Pomiary i automatyka opracowanie Piopio
automatyzacja opracowanie dobre
Automaty opracowanie
Automatyka Opracowane zagadnienia
AUTOMATY opracowanie, Semestr IV, Wspólne, Podstawy automatyki
automatyka-opracownie v0.8, mechatronika, II rok, automatyka
Automatyzacja opracowanie slajdów
automaty opracowane grup PA ,,PA itd
opracowanie pytan Automatyka
opracowanie2, Automatyka i robotyka
Próba opracowania automatyka
6991047 Opracowane Automatyka K Nieznany (2)
Opracowanie systemu informatycznego z automatycznym zawieraniem transakcji na rynku walutowym(1)
Podstawy Automatyki Laborator Opracowanie id 72970
więcej podobnych podstron