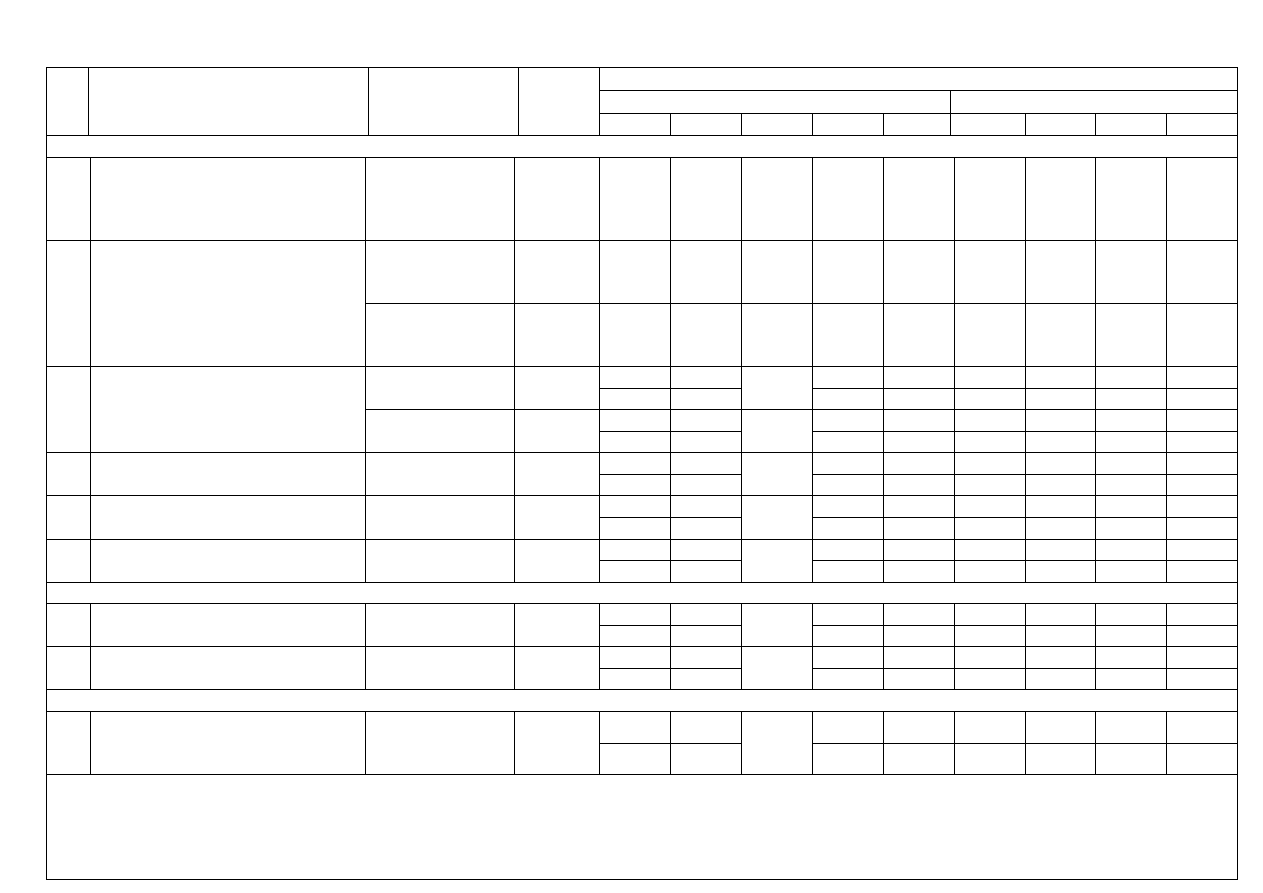
Analiza obliczeniowa ramy stalowej
Lp.
Rodzaj analizy statycznej/
wymiarowanie prętów
Długość
wyboczeniowa
Przesuw
globalny
ramy
Wyniki analizy
Słup; pręt nr…..
Rygiel; pręt nr….
N
M
µ
HEB
ratio
M
j
M
s
IPE
ratio
Analiza I – rzędu, węzły sztywne
1.
Koncepcja, geometria, układy i
kombinacje obciążeń,
Obliczenia wstępne (przybliżone),
dobór prętów
nomogramy,
KKB
ręcznie
2.
Analiza stateczności ramy
(analiza
wyboczeniowa)
nieROBOT KMK
(analiza
wyboczeniowa)
ROBOT KMK
3.
ROBOT: statyka i wymiarowanie
(parametry prętów)
Robot (fragment
ramy) KKB
Robot (rama
przesuwna) KKB
4.
jw. + imperfekcje globalne (metoda
normowa)
Robot (rama
przesuwna) KKB
5.
jw. + imperfekcje lokalne (metoda
normowa)
Robot (rama
przesuwna) KKB
6.
jw. + efekt P-∆ (metoda normowa)
Robot (rama
nieprzes.) KKB
Analiza II – rzędu, węzły sztywne
7.
statyka II rzędu (Robot) +
imperfekcje globalne (Robot)
Robot (rama
nieprzes.) KMK
8.
jw. + imperfekcje lokalne (Robot)
Robot (rama
nieprzes.) KMK
Analiza II – rzędu, węzły podatne
9.
jak w p. 3 + nieliniowe
charakterystyki węzłów:
ROBOT, CoP
Robot (rama
nieprzes.) KKB
Uwagi:
- student wykonuje obliczenia wg powyższego układu, analizując i porównując wyniki etapów, metod i narzędzi projektowych, dla wskazanego słupa i rygla,
- w komórkach odnoszących się do sił przekrojowych oraz przekrojów należy podać wyniki: w liczniku dla wstępnie przyjętych przekrojów, w mianowniku dla
przekrojów zwymiarowanych programem ROBOT.
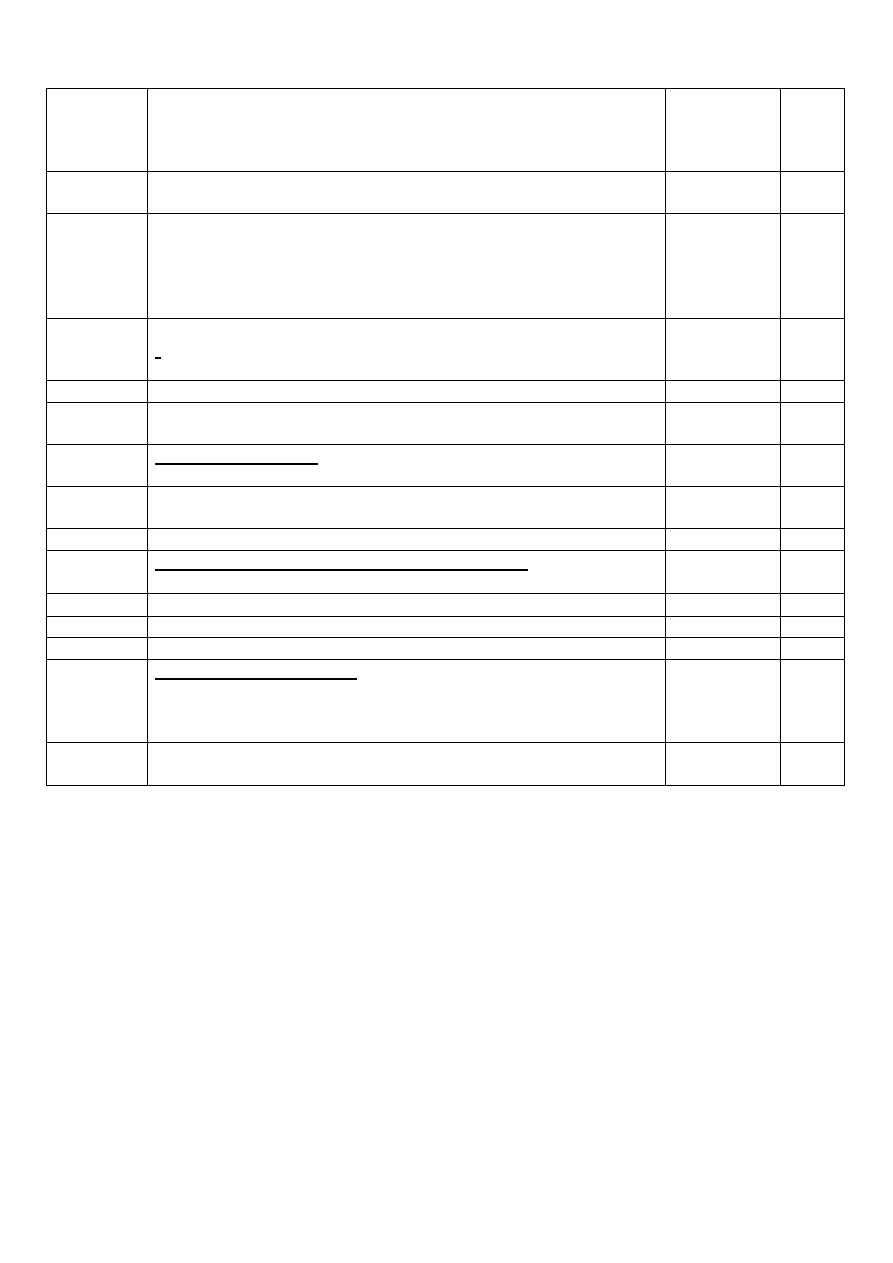
Projektowanie stalowych konstrukcji szkieletowych
KKB
Złożone
konstrukcje
stalowe
Zadania/ etapy/metody analizy
KMK
Metody
komputerowe
Uwagi
X
KONCEPCJA UKŁADU NOŚNEGO: grawitacyjnego, stężającego
– wyodrębnienie ramy do analizy; zestawienie obciążeń, kombinacje
X ręcznie
ETAPY ANALIZY:
PROJEKTOWANIE WSTĘPNE:
Wstępne wyznaczenie sił wewnętrznych – dobranie przekrojów
prętów, wyznaczenie długości wyboczeniowych metodą pręta
wydzielonego (nomogramy)
X
Robot
Obliczenia statyczne – wykresy sił wewnętrznych, przemieszczeń
(analiza liniowa, I – rzędu, węzły sztywne), parametry prętów, grupy
prętów, wymiarowanie
X
Robot
Analiza stateczności układu ramowego – wyznaczenie P
cr
, α
cr
, L
cr
X nieRobot
X ręcznie
Sprawdzenie czy należy uwzględnić imperfekcje globalne i lokalne
oraz czy rama jest wrażliwa na efekty II – rzędu
X ręcznie
+ Robot
Analiza imperfekcji (analiza liniowa, I – rzędu, węzły sztywne)
1. Imperfekcje metoda normową (globalne; lokalne)
2. Imperfekcje komputerowo (ROBOT: globalne – transformacja
układu współrzędnych; lokalne – wygięcie prętów)
X Robot
Porównanie wyników obu metod
X ręcznie
+ Robot
Analiza II – rzędu, węzły sztywne, + imperfekcje
1. P - ∆ metoda normowa
2. P - ∆ komputerowo
X Robot
3. P - δ
X Robot
Porównanie wyników obu metod
X Robot
CoP
IV. j.w ale węzły podatne (liniowa (EC3) i nieliniowa
charakterystyka M – φ)
Analiza globalna z uwzględnieniem węzłów podatnych, II – rzędu, +
imperfekcje
Porównanie wyników poszczególnych etapów analizy, metod i
narzędzi projektowych (tabelka).
Wyszukiwarka
Podobne podstrony:
Analiza obliczeniowa ramy stalowej, Budownictwo - studia, II stopień, I rok, Złożone konstrukcje met
tabelka-analiza obliczeniowa ramy stalowej
obliczenia konstrukcji stalowych
OBLICZENIE RAMY METODĄ PRZEMIESZCZEŃOD TEMPERATURY projekt43
Obliczenia stropu stalowego, Studia Inż, IV semestr inż, Konstrukcje Metalowe
Obliczenia stropu stalowego
Analiza stateczności słupów stalowych obiążonych ściskaniem zmiennym w czasie
Obliczanie ramy metodą przemieszczeń
11 Starosolski W Analiza obliczeniowa w ocenie stanu awaryjnego konstrukcji zelbetowych
OBLICZANIE RAMY PRZESTRZENNEJ METODĄ SIŁ
Analiza obliczeniowa szkielety [tryb zgodności]
OBLICZENIE RAMY METODĄ PRZEMIESZCZEŃ OD OSIADANIA PODPÓR projekt42
Obliczenia ramy Metodą przemieszczeń temperatura projekt39
Obliczenia ramy Metodą przemieszczeń projekt38
Obliczanie ramy metodą przemieszczeń obliczenie momentów oraz sił tnących korzystając z równania róż
Analiza obliczenia
więcej podobnych podstron