Kryteria realizowalności fizycznej
obliczeń kwantowych
Kryteria di Vincenzo
Gromadzenie i przekształcanie informacji kwantowej są
procesami bardzo subtelnymi (”kruchymi”), których realizacja
wymaga, aby układ fizyczny spełniał trudne warunki, zwane
kryteriami di Vincenzo
.
Kryterium I
W układzie fizycznym musi istnieć możliwość wytworzenia
dobrze zdefiniowanych kubitów.
Kryterium I
W układzie fizycznym musi istnieć możliwość wytworzenia
dobrze zdefiniowanych kubitów.
Przykłady kubitów
I
stany spinowe elektronu
I
stany polaryzacji fotonu
I
stany związane w atomie naturalnym lub sztucznym
(kropce kwantowej)
Przykłady kubitów
I
stany spinowe elektronu
I
stany polaryzacji fotonu
I
stany związane w atomie naturalnym lub sztucznym
(kropce kwantowej)
Przykłady kubitów
I
stany spinowe elektronu
I
stany polaryzacji fotonu
I
stany związane w atomie naturalnym lub sztucznym
(kropce kwantowej)
Przykłady kubitów
I
stany spinowe elektronu
I
stany polaryzacji fotonu
I
stany związane w atomie naturalnym lub sztucznym
(kropce kwantowej)
Kryterium II
W układzie fizycznym musi istnieć możliwość spreparowania
układu wielu kubitów tak, aby każdy kubit znajdował się w
stanie początkowym |0i.
=⇒ Przygotowanie stanu początkowego (na ogół jest to
stan podstawowy układu).
Kryterium II
W układzie fizycznym musi istnieć możliwość spreparowania
układu wielu kubitów tak, aby każdy kubit znajdował się w
stanie początkowym |0i.
=⇒ Przygotowanie stanu początkowego (na ogół jest to
stan podstawowy układu).
Kryterium II
W układzie fizycznym musi istnieć możliwość spreparowania
układu wielu kubitów tak, aby każdy kubit znajdował się w
stanie początkowym |0i.
=⇒ Przygotowanie stanu początkowego (na ogół jest to
stan podstawowy układu).
Kryterium III
†
Kubity muszą posiadać wystarczająco długi czas życia T
1
tak,
aby nie uległy rozpadowi w trakcie obliczeń.
Kryterium III
†
Kubity muszą posiadać wystarczająco długi czas życia T
1
tak,
aby nie uległy rozpadowi w trakcie obliczeń.
†
Zwykle czas życia T
1
jest dłuższy niż czas koherencji T
2
, a
zatem kryterium III przeformułujemy dla czasu koherencji.
Kryterium III
Kubity muszą posiadać wystarczająco długi czas koherencji T
2
tak, aby stany kwantowe pozostawały koherentne w trakcie
obliczeń.
Kryterium III
Kubity muszą posiadać wystarczająco długi czas koherencji T
2
tak, aby stany kwantowe pozostawały koherentne w trakcie
obliczeń.
Kryterium IV
Musi istnieć możliwość wykonywania kontrolowanych operacji
logicznych na kubitach.
W układzie fizycznym musi istnieć możliwość realizacji
kwantowych bramek logicznych należących do uniwersalnego
zbióru kwantowych bramek logicznych.
Zbiór ten zawiera bramki jednokubitowe i dwukubitową bramkę
CNOT.
Kryterium IV
Musi istnieć możliwość wykonywania kontrolowanych operacji
logicznych na kubitach.
W układzie fizycznym musi istnieć możliwość realizacji
kwantowych bramek logicznych należących do uniwersalnego
zbióru kwantowych bramek logicznych.
Zbiór ten zawiera bramki jednokubitowe i dwukubitową bramkę
CNOT.
Kryterium IV
Musi istnieć możliwość wykonywania kontrolowanych operacji
logicznych na kubitach.
W układzie fizycznym musi istnieć możliwość realizacji
kwantowych bramek logicznych należących do uniwersalnego
zbióru kwantowych bramek logicznych.
Zbiór ten zawiera bramki jednokubitowe i dwukubitową bramkę
CNOT.
Kryterium IV
Musi istnieć możliwość wykonywania kontrolowanych operacji
logicznych na kubitach.
W układzie fizycznym musi istnieć możliwość realizacji
kwantowych bramek logicznych należących do uniwersalnego
zbióru kwantowych bramek logicznych.
Zbiór ten zawiera bramki jednokubitowe i dwukubitową bramkę
CNOT.
Kryterium V
Musi istnieć efektywna procedura mierzenia stanu końcowego
kubitów po wykonaniu obliczeń.
=⇒ Odczyt wyników.
Kryterium V
Musi istnieć efektywna procedura mierzenia stanu końcowego
kubitów po wykonaniu obliczeń.
=⇒ Odczyt wyników.
Kryterium V
Musi istnieć efektywna procedura mierzenia stanu końcowego
kubitów po wykonaniu obliczeń.
=⇒ Odczyt wyników.
Kryterium VI
Układ fizyczny musi być skalowalny, tzn. musi istnieć
możliwość wytworzenia liczby kubitów wystarczająco dużej do
wykonania zadanych obliczeń.
Kryterium VI
Układ fizyczny musi być skalowalny, tzn. musi istnieć
możliwość wytworzenia liczby kubitów wystarczająco dużej do
wykonania zadanych obliczeń.
Rozpad i dekoherencja kubitów
Oddziaływanie z otoczeniem
(1)
z jednej strony prowadzi do dekoherencji kubitów,
(2)
z drugiej strony jest konieczne do zapisu/odczytu
kubitów.
(2) =⇒ Oddziaływania z otoczeniem nie można wyeliminować
,
a zatem dekoherencja kubitów będzie występować w każdym
komputerze kwantowym.
Oddziaływanie z otoczeniem
(1)
z jednej strony prowadzi do dekoherencji kubitów,
(2)
z drugiej strony jest konieczne do zapisu/odczytu
kubitów.
(2) =⇒ Oddziaływania z otoczeniem nie można wyeliminować
,
a zatem dekoherencja kubitów będzie występować w każdym
komputerze kwantowym.
Oddziaływanie z otoczeniem
(1)
z jednej strony prowadzi do dekoherencji kubitów,
(2)
z drugiej strony jest konieczne do zapisu/odczytu
kubitów.
(2) =⇒ Oddziaływania z otoczeniem nie można wyeliminować
,
a zatem dekoherencja kubitów będzie występować w każdym
komputerze kwantowym.
Oddziaływanie z otoczeniem
(1)
z jednej strony prowadzi do dekoherencji kubitów,
(2)
z drugiej strony jest konieczne do zapisu/odczytu
kubitów.
(2) =⇒ Oddziaływania z otoczeniem nie można wyeliminować
,
a zatem dekoherencja kubitów będzie występować w każdym
komputerze kwantowym.
Oddziaływanie z otoczeniem
(1)
z jednej strony prowadzi do dekoherencji kubitów,
(2)
z drugiej strony jest konieczne do zapisu/odczytu
kubitów.
(2) =⇒ Oddziaływania z otoczeniem nie można wyeliminować
,
a zatem dekoherencja kubitów będzie występować w każdym
komputerze kwantowym.
Liczba N
op
kwantowych operacji logicznych o czasie wykonania
pojedynczej operacji T
op
N
op
=
T
2
T
op
(1)
możliwych do realizacji w czasie dekoherencji T
2
jest ważnym
parametrem, charakteryzującym przyszły komputer kwantowy.
Liczba ta powinna być możliwie duża, co oznacza, że
N
op
' 10
3
÷ 10
4
.
Liczba N
op
kwantowych operacji logicznych o czasie wykonania
pojedynczej operacji T
op
N
op
=
T
2
T
op
(1)
możliwych do realizacji w czasie dekoherencji T
2
jest ważnym
parametrem, charakteryzującym przyszły komputer kwantowy.
Liczba ta powinna być możliwie duża, co oznacza, że
N
op
' 10
3
÷ 10
4
.
Liczba N
op
kwantowych operacji logicznych o czasie wykonania
pojedynczej operacji T
op
N
op
=
T
2
T
op
(1)
możliwych do realizacji w czasie dekoherencji T
2
jest ważnym
parametrem, charakteryzującym przyszły komputer kwantowy.
Liczba ta powinna być możliwie duża, co oznacza, że
N
op
' 10
3
÷ 10
4
.
Liczba N
op
kwantowych operacji logicznych o czasie wykonania
pojedynczej operacji T
op
N
op
=
T
2
T
op
(1)
możliwych do realizacji w czasie dekoherencji T
2
jest ważnym
parametrem, charakteryzującym przyszły komputer kwantowy.
Liczba ta powinna być możliwie duża,
co oznacza, że
N
op
' 10
3
÷ 10
4
.
Liczba N
op
kwantowych operacji logicznych o czasie wykonania
pojedynczej operacji T
op
N
op
=
T
2
T
op
(1)
możliwych do realizacji w czasie dekoherencji T
2
jest ważnym
parametrem, charakteryzującym przyszły komputer kwantowy.
Liczba ta powinna być możliwie duża, co oznacza, że
N
op
' 10
3
÷ 10
4
.
Interpretacja geometryczna procesów rozpadu i
dekoherencji kubitów
Zobrazowanie kubitów za pomocą sfery Blocha umożliwia
podanie interpretacji geometrycznej procesów rozpadu i
dekoherencji kubitów.
Interpretacja geometryczna procesów rozpadu i
dekoherencji kubitów
Zobrazowanie kubitów za pomocą sfery Blocha umożliwia
podanie interpretacji geometrycznej procesów rozpadu i
dekoherencji kubitów.
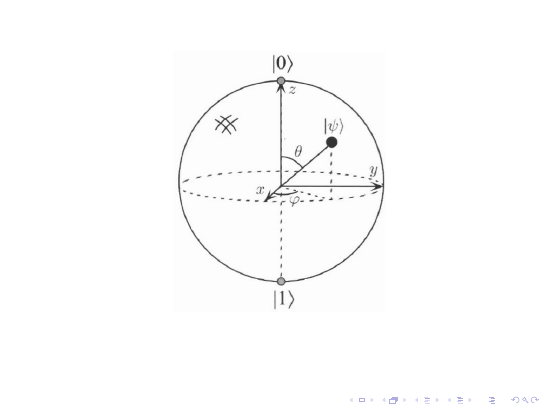
Rysunek:
10.1. Sfera Blocha.
Czas życia, czas relaksacji podłużnej T
1
odpowiada
obrotowi wektora Blocha w kierunku południkowym,
czyli
koniec wektora Blocha porusza się po łuku łączącym dwa
bieguny od bieguna północnego do południowego lub odwrotnie.
Inaczej: podczas relaksacji następuje obrót o kąt ∆θ.
Czas życia, czas relaksacji podłużnej T
1
odpowiada
obrotowi wektora Blocha w kierunku południkowym, czyli
koniec wektora Blocha porusza się po łuku łączącym dwa
bieguny od bieguna północnego do południowego lub odwrotnie.
Inaczej: podczas relaksacji następuje obrót o kąt ∆θ.
Czas życia, czas relaksacji podłużnej T
1
odpowiada
obrotowi wektora Blocha w kierunku południkowym, czyli
koniec wektora Blocha porusza się po łuku łączącym dwa
bieguny od bieguna północnego do południowego lub odwrotnie.
Inaczej: podczas relaksacji następuje obrót o kąt ∆θ.
Czas koherencji, czas relaksacji poprzecznej T
2
odpowiada obrotowi wektora Blocha w kierunku
równoleżnikowym,
czyli koniec wektora Blocha porusza się po
równiku lub po łukach równoległych do niego.
Inaczej: podczas dekoherencji następuje obrót o kąt ∆ϕ.
Proces dekoherencji nazywany jest często
procesem defazacji
.
Czas koherencji, czas relaksacji poprzecznej T
2
odpowiada obrotowi wektora Blocha w kierunku
równoleżnikowym, czyli koniec wektora Blocha porusza się po
równiku lub po łukach równoległych do niego.
Inaczej: podczas dekoherencji następuje obrót o kąt ∆ϕ.
Proces dekoherencji nazywany jest często
procesem defazacji
.
Czas koherencji, czas relaksacji poprzecznej T
2
odpowiada obrotowi wektora Blocha w kierunku
równoleżnikowym, czyli koniec wektora Blocha porusza się po
równiku lub po łukach równoległych do niego.
Inaczej: podczas dekoherencji następuje obrót o kąt ∆ϕ.
Proces dekoherencji nazywany jest często
procesem defazacji
.
Czas koherencji, czas relaksacji poprzecznej T
2
odpowiada obrotowi wektora Blocha w kierunku
równoleżnikowym, czyli koniec wektora Blocha porusza się po
równiku lub po łukach równoległych do niego.
Inaczej: podczas dekoherencji następuje obrót o kąt ∆ϕ.
Proces dekoherencji nazywany jest często
procesem defazacji
.
Pojęcia czasów relaksacji podłużnej i poprzecznej są używane w
teorii
magnetycznego rezonansu jądrowego
do opisu zmian
wektora spinu.
Model opisujący sprzężenie kubitu z otoczeniem
Rozważamy prosty model opisujący takie sprzężenie kubitu z
otoczeniem, które prowadzi do dekoherencji.
Powiedzmy, że kubit zdefiniowany jest za pomocą stanów bazy
|0i
A
, |1i
A
, które są stanami kwantowymi układu A. Zakładamy,
że stany bazy |0i
A
, |1i
A
nie ulegają zmianie wskutek
oddziaływania z otoczeniem.
Natomiast zmieniają się stany otoczenia (|0i
E
, |1i
E
, |2i
E
, . . .).
Rozważamy prosty model opisujący takie sprzężenie kubitu z
otoczeniem, które prowadzi do dekoherencji.
Powiedzmy, że kubit zdefiniowany jest za pomocą stanów bazy
|0i
A
, |1i
A
, które są stanami kwantowymi układu A.
Zakładamy,
że stany bazy |0i
A
, |1i
A
nie ulegają zmianie wskutek
oddziaływania z otoczeniem.
Natomiast zmieniają się stany otoczenia (|0i
E
, |1i
E
, |2i
E
, . . .).
Rozważamy prosty model opisujący takie sprzężenie kubitu z
otoczeniem, które prowadzi do dekoherencji.
Powiedzmy, że kubit zdefiniowany jest za pomocą stanów bazy
|0i
A
, |1i
A
, które są stanami kwantowymi układu A. Zakładamy,
że stany bazy |0i
A
, |1i
A
nie ulegają zmianie wskutek
oddziaływania z otoczeniem.
Natomiast zmieniają się stany otoczenia (|0i
E
, |1i
E
, |2i
E
, . . .).
Rozważamy prosty model opisujący takie sprzężenie kubitu z
otoczeniem, które prowadzi do dekoherencji.
Powiedzmy, że kubit zdefiniowany jest za pomocą stanów bazy
|0i
A
, |1i
A
, które są stanami kwantowymi układu A. Zakładamy,
że stany bazy |0i
A
, |1i
A
nie ulegają zmianie wskutek
oddziaływania z otoczeniem.
Natomiast zmieniają się stany otoczenia (|0i
E
, |1i
E
, |2i
E
, . . .).
Jeżeli kubit był w stanie |0i
A
, to otoczenie znajdujące się
początkowo w stanie |0i
E
przechodzi – po bardzo krótkim
czasie ∆t T
2
– do stanu |1i
E
z prawdopodobieństwem p.
Jeżeli natomiast kubit był w stanie |1i
A
, to otoczenie
znajdujące się początkowo w stanie |0i
E
przechodzi do stanu
|2i
E
z prawdopodobieństwem p.
Przejścia te opisane są następująco:
|0i
A
⊗ |0i
E
−→
p
1 − p |0i
A
⊗ |0i
E
+
√
p |0i
A
⊗ |1i
E
,
(2)
|1i
A
⊗ |0i
E
−→
p
1 − p |1i
A
⊗ |0i
E
+
√
p |1i
A
⊗ |2i
E
.
(3)
Jeżeli kubit był w stanie |0i
A
, to otoczenie znajdujące się
początkowo w stanie |0i
E
przechodzi – po bardzo krótkim
czasie ∆t T
2
– do stanu |1i
E
z prawdopodobieństwem p.
Jeżeli natomiast kubit był w stanie |1i
A
, to otoczenie
znajdujące się początkowo w stanie |0i
E
przechodzi do stanu
|2i
E
z prawdopodobieństwem p.
Przejścia te opisane są następująco:
|0i
A
⊗ |0i
E
−→
p
1 − p |0i
A
⊗ |0i
E
+
√
p |0i
A
⊗ |1i
E
,
(2)
|1i
A
⊗ |0i
E
−→
p
1 − p |1i
A
⊗ |0i
E
+
√
p |1i
A
⊗ |2i
E
.
(3)
Jeżeli kubit był w stanie |0i
A
, to otoczenie znajdujące się
początkowo w stanie |0i
E
przechodzi – po bardzo krótkim
czasie ∆t T
2
– do stanu |1i
E
z prawdopodobieństwem p.
Jeżeli natomiast kubit był w stanie |1i
A
, to otoczenie
znajdujące się początkowo w stanie |0i
E
przechodzi do stanu
|2i
E
z prawdopodobieństwem p.
Przejścia te opisane są następująco:
|0i
A
⊗ |0i
E
−→
p
1 − p |0i
A
⊗ |0i
E
+
√
p |0i
A
⊗ |1i
E
,
(2)
|1i
A
⊗ |0i
E
−→
p
1 − p |1i
A
⊗ |0i
E
+
√
p |1i
A
⊗ |2i
E
.
(3)
Jeżeli kubit był w stanie |0i
A
, to otoczenie znajdujące się
początkowo w stanie |0i
E
przechodzi – po bardzo krótkim
czasie ∆t T
2
– do stanu |1i
E
z prawdopodobieństwem p.
Jeżeli natomiast kubit był w stanie |1i
A
, to otoczenie
znajdujące się początkowo w stanie |0i
E
przechodzi do stanu
|2i
E
z prawdopodobieństwem p.
Przejścia te opisane są następująco:
|0i
A
⊗ |0i
E
−→
p
1 − p |0i
A
⊗ |0i
E
+
√
p |0i
A
⊗ |1i
E
,
(2)
|1i
A
⊗ |0i
E
−→
p
1 − p |1i
A
⊗ |0i
E
+
√
p |1i
A
⊗ |2i
E
.
(3)
Jeżeli kubit był w stanie |0i
A
, to otoczenie znajdujące się
początkowo w stanie |0i
E
przechodzi – po bardzo krótkim
czasie ∆t T
2
– do stanu |1i
E
z prawdopodobieństwem p.
Jeżeli natomiast kubit był w stanie |1i
A
, to otoczenie
znajdujące się początkowo w stanie |0i
E
przechodzi do stanu
|2i
E
z prawdopodobieństwem p.
Przejścia te opisane są następująco:
|0i
A
⊗ |0i
E
−→
p
1 − p |0i
A
⊗ |0i
E
+
√
p |0i
A
⊗ |1i
E
,
(2)
|1i
A
⊗ |0i
E
−→
p
1 − p |1i
A
⊗ |0i
E
+
√
p |1i
A
⊗ |2i
E
.
(3)
Stan początkowy całego układu A + E ma postać
|Ψ
0
i = (λ|0i
A
+ µ|1i
A
) ⊗ |0i
E
,
(4)
przy czym |λ|
2
+ |µ|
2
= 1.
Stan początkowy całego układu A + E ma postać
|Ψ
0
i = (λ|0i
A
+ µ|1i
A
) ⊗ |0i
E
,
(4)
przy czym |λ|
2
+ |µ|
2
= 1.
Stan początkowy całego układu A + E ma postać
|Ψ
0
i = (λ|0i
A
+ µ|1i
A
) ⊗ |0i
E
,
(4)
przy czym |λ|
2
+ |µ|
2
= 1.
Macierz gęstości dla stanu początkowego układu A ma postać
%
(0)
A
=
%
00
%
01
%
10
%
11
!
,
(5)
gdzie
%
00
= |λ|
2
, %
11
= |µ|
2
, %
01
= λµ
?
, %
10
= λ
?
µ .
(6)
Macierz gęstości dla stanu początkowego układu A ma postać
%
(0)
A
=
%
00
%
01
%
10
%
11
!
,
(5)
gdzie
%
00
= |λ|
2
, %
11
= |µ|
2
, %
01
= λµ
?
, %
10
= λ
?
µ .
(6)
Macierz gęstości dla stanu początkowego układu A ma postać
%
(0)
A
=
%
00
%
01
%
10
%
11
!
,
(5)
gdzie
%
00
= |λ|
2
, %
11
= |µ|
2
, %
01
= λµ
?
, %
10
= λ
?
µ .
(6)
W wyniku transformacji opisanej wzorami (2) i (3) macierz
gęstości układu A przyjmuje postać
%
(1)
A
=
%
00
(1 − p)%
01
(1 − p)%
10
%
11
!
.
(7)
W wyniku transformacji opisanej wzorami (2) i (3) macierz
gęstości układu A przyjmuje postać
%
(1)
A
=
%
00
(1 − p)%
01
(1 − p)%
10
%
11
!
.
(7)
Po upływie czasu t = n∆t [po n transformacjach (2) i (3)]
otrzymujemy macierz gęstości o postaci
%
(n)
A
=
%
00
(1 − p)
n
%
01
(1 − p)
n
%
10
%
11
!
.
(8)
Po upływie czasu t = n∆t [po n transformacjach (2) i (3)]
otrzymujemy macierz gęstości o postaci
%
(n)
A
=
%
00
(1 − p)
n
%
01
(1 − p)
n
%
10
%
11
!
.
(8)
Prawdopodobieństwo p pojedynczego przejścia można wyrazić
jako
p = Γ∆t ,
(9)
gdzie Γ oznacza szybkość przejść.
Jeżeli obserwujemy ewolucję kubitu w czasie t, gdzie t = n∆t,
to dla n → ∞, czyli dla ∆t → 0, otrzymujemy
%
01
(t) = %
01
(1 − Γ∆t)
t/∆t ∆t→0
−→ %
01
e
−Γt
.
(10)
Prawdopodobieństwo p pojedynczego przejścia można wyrazić
jako
p = Γ∆t ,
(9)
gdzie Γ oznacza szybkość przejść.
Jeżeli obserwujemy ewolucję kubitu w czasie t, gdzie t = n∆t,
to dla n → ∞, czyli dla ∆t → 0, otrzymujemy
%
01
(t) = %
01
(1 − Γ∆t)
t/∆t ∆t→0
−→ %
01
e
−Γt
.
(10)
Prawdopodobieństwo p pojedynczego przejścia można wyrazić
jako
p = Γ∆t ,
(9)
gdzie Γ oznacza szybkość przejść.
Jeżeli obserwujemy ewolucję kubitu w czasie t, gdzie t = n∆t,
to dla n → ∞, czyli dla ∆t → 0, otrzymujemy
%
01
(t) = %
01
(1 − Γ∆t)
t/∆t ∆t→0
−→ %
01
e
−Γt
.
(10)
Prawdopodobieństwo p pojedynczego przejścia można wyrazić
jako
p = Γ∆t ,
(9)
gdzie Γ oznacza szybkość przejść.
Jeżeli obserwujemy ewolucję kubitu w czasie t, gdzie t = n∆t,
to dla n → ∞, czyli dla ∆t → 0, otrzymujemy
%
01
(t) = %
01
(1 − Γ∆t)
t/∆t ∆t→0
−→ %
01
e
−Γt
.
(10)
Prawdopodobieństwo p pojedynczego przejścia można wyrazić
jako
p = Γ∆t ,
(9)
gdzie Γ oznacza szybkość przejść.
Jeżeli obserwujemy ewolucję kubitu w czasie t, gdzie t = n∆t,
to dla n → ∞, czyli dla ∆t → 0, otrzymujemy
%
01
(t) = %
01
(1 − Γ∆t)
t/∆t ∆t→0
−→ %
01
e
−Γt
.
(10)
Wynika stąd końcowa postać macierzy gęstości
%
A
(t) =
%
00
%
01
e
−Γt
%
10
e
−Γt
%
11
!
.
(11)
Wynika stąd końcowa postać macierzy gęstości
%
A
(t) =
%
00
%
01
e
−Γt
%
10
e
−Γt
%
11
!
.
(11)
Czas koherencji można wyrazić jako
T
2
=
1
Γ
.
(12)
Końcową postać (11) macierzy gęstości możemy wyrazić jako
%
A
(t) =
%
00
%
01
e
−t/T
2
%
10
e
−t/T
2
%
11
!
.
(13)
Czas koherencji można wyrazić jako
T
2
=
1
Γ
.
(12)
Końcową postać (11) macierzy gęstości możemy wyrazić jako
%
A
(t) =
%
00
%
01
e
−t/T
2
%
10
e
−t/T
2
%
11
!
.
(13)
Czas koherencji można wyrazić jako
T
2
=
1
Γ
.
(12)
Końcową postać (11) macierzy gęstości możemy wyrazić jako
%
A
(t) =
%
00
%
01
e
−t/T
2
%
10
e
−t/T
2
%
11
!
.
(13)
Czas koherencji można wyrazić jako
T
2
=
1
Γ
.
(12)
Końcową postać (11) macierzy gęstości możemy wyrazić jako
%
A
(t) =
%
00
%
01
e
−t/T
2
%
10
e
−t/T
2
%
11
!
.
(13)
Po upływie odpowiednio długiego czasu t (t → ∞) macierz
gęstości (13) staje się diagonalna, czyli
%(t)
t→∞
−→
%
00
0
0
%
11
!
.
(14)
Po upływie odpowiednio długiego czasu t (t → ∞) macierz
gęstości (13) staje się diagonalna, czyli
%(t)
t→∞
−→
%
00
0
0
%
11
!
.
(14)
Uwzględniając postać macierzy gęstości (5) możemy zapisać
wzór (14) jako
%(t) =
|λ|
2
0
0
|µ|
2
!
.
(15)
Uwzględniając postać macierzy gęstości (5) możemy zapisać
wzór (14) jako
%(t) =
|λ|
2
0
0
|µ|
2
!
.
(15)
Ewolucja układu A + E ze stanu początkowego (4) o macierzy
gęstości (5) do stanu końcowego o macierzy gęstości (15) nie
jest opisana operatorem unitarnym.
W wyniku dekoherencji stan początkowy rozpada się na
mieszaninę (nie superpozycję) stanów |0i
A
i |1i
A
, która ma
postać
|λ|
2
|0i
A
+ |µ|
2
|1i
A
.
(16)
Mieszania stanów (16) nie podlega interferencji kwantowej.
Ewolucja układu A + E ze stanu początkowego (4) o macierzy
gęstości (5) do stanu końcowego o macierzy gęstości (15) nie
jest opisana operatorem unitarnym.
W wyniku dekoherencji stan początkowy rozpada się na
mieszaninę (nie superpozycję) stanów |0i
A
i |1i
A
,
która ma
postać
|λ|
2
|0i
A
+ |µ|
2
|1i
A
.
(16)
Mieszania stanów (16) nie podlega interferencji kwantowej.
Ewolucja układu A + E ze stanu początkowego (4) o macierzy
gęstości (5) do stanu końcowego o macierzy gęstości (15) nie
jest opisana operatorem unitarnym.
W wyniku dekoherencji stan początkowy rozpada się na
mieszaninę (nie superpozycję) stanów |0i
A
i |1i
A
, która ma
postać
|λ|
2
|0i
A
+ |µ|
2
|1i
A
.
(16)
Mieszania stanów (16) nie podlega interferencji kwantowej.
Ewolucja układu A + E ze stanu początkowego (4) o macierzy
gęstości (5) do stanu końcowego o macierzy gęstości (15) nie
jest opisana operatorem unitarnym.
W wyniku dekoherencji stan początkowy rozpada się na
mieszaninę (nie superpozycję) stanów |0i
A
i |1i
A
, która ma
postać
|λ|
2
|0i
A
+ |µ|
2
|1i
A
.
(16)
Mieszania stanów (16) nie podlega interferencji kwantowej.
Document Outline
Wyszukiwarka
Podobne podstrony:
ćw 10 GM, chemia fizyczna I, chemia fizyczna I
10 Kryteria segmentacji na rynku dóbr i usług konsumpcyjnych
Ćwiczenie 10.6, technologia chemiczna, Fizyczna, Labolatorium
10.1, semestr 4, chemia fizyczna, sprawka laborki, 10.1
Ćwiczenie 10.1, technologia chemiczna, Fizyczna, Labolatorium
03 10 Raportowanie realizacji zlecenia produkcyjnego INSTR9
10 Kryteria doboru Zakładów Służby Zdrowia - załącznik nr 1, Studia
FIZ 10, Sprawozdanie z labolatorium fizycznego
Ćwiczenie nr 10 gosia, Chemia fizyczna
ćw 10 GM, chemia fizyczna I, chemia fizyczna I
Ćwiczenie 1 Wahadło Fizyczne Obliczenia
UZUPEŁNIENIE ROZDZIAŁ 10 KRYTERIA OSOBOWOŚCI HISTRIONICZNEJ
Prezentacja JMichalska PSP w obliczu zagrozen cywilizacyjn 10 2007
kinezyterapia 17 10, POSTAWA CIAŁA I KRYTERIA JEJ OCENY
10.6 poprawione, semestr 4, chemia fizyczna, sprawka laborki, 10.6
obliczenia i wnioski, BIOTECHNOLOGIA POLITECHNIKA ŁÓDZKA, CHEMIA FIZYCZNA
więcej podobnych podstron