
1. Układ biegunowy
2. Ruch ze stałą prędkością i stałym przyspieszeniem z warunkami początkowymi
3.Zasady dynamiki Newtona
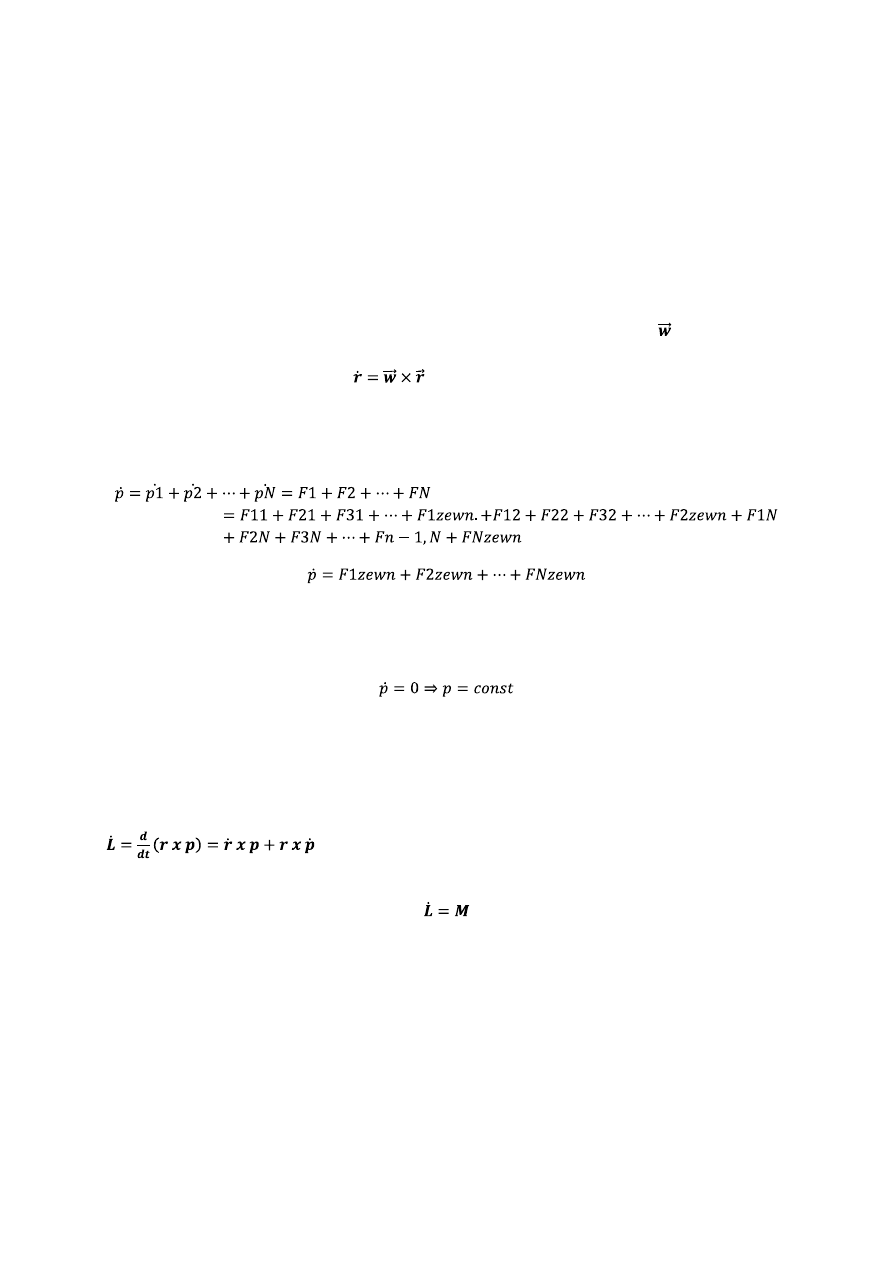
4.Zasada zachowania pędu w układzie N czastek
5. Zasada zachowania energii mechanicznej układu N cząstek
6. Zaleznośd L od M
7. Tłumiony oscylator harmoniczny
Siła harmoniczna, Warunki początkowe, rozwiązanie równania
8. Rezonans, częstośd rezonansowa, wymuszony oscylator harmoniczny.
9.przyspieszenie, prędkośd styczna normalna.
10. Definicja bryły sztywnej
11.Wektor prędkości kątowej
12. Środek masy bryły sztywnej.
13.Energia kinetyczna bryły sztywnej, zależnośd wektora prędkości kątowej od tensora momentu
bezwładności.
14. Twierdzenie Steinera
15. Równania Eulera bąka symetrycznego.
Precesja, stożek polodii i herpolhodii
16. Wartośd stałej grawitacji, zasada superpozycji sił grawitacyjnych, prawo powszechnego ciążenia
17. Prawo 1 keplera uogólnione i rozszerzone
18. Udowodnienie 3 prawa Keplera
19. Udowodnienie 2 prawa Keplera
20.Prawo hooka, moduł Younga
21. Zmiana wymiarów poprzecznych dla rozciągania sciskania, wspolcznynik poisonna
22. co to jest energia potencjalna, zasada zach en (suma Ep i Ek)
23. Okres drgao wahadła,oscylatra
13.
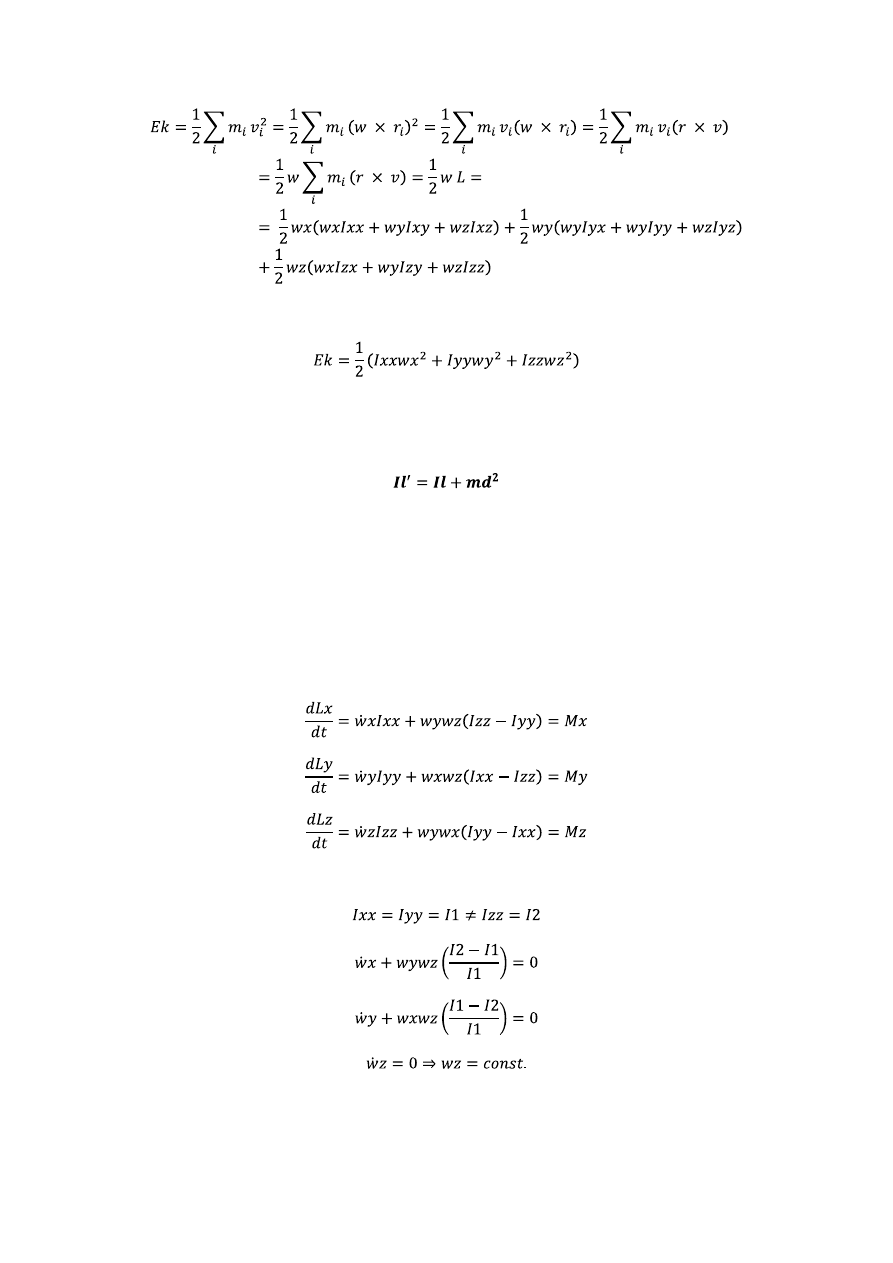
W przypadku układu odniesienia pokrywającego się z osiami głównymi:
Składowe tensora momentu bezwładności to 9 liczb opisujących rozkład masy w bryle sztywnej
14.
Il’-moment bezwładności bryły sztywnej względem osi równoległej
d-odległośd między osiami
m-masa
Il-moment bezwładności bryły sztywnej względem osi przechodzącej przez środek masy
15. 3 równania Eulera
Dla bąka symetrycznego
Rozwiązania
wx=Acos(Ωt)
wy=Asin (Ωt)
Stożek polodii – stożek który jest zakreślany przez wektor prędkości kątowej
Stożęk Herpolhodii-stożek który jest zakreślany przez wektor momentu pędu
Precesja- Zjawisko zmiany kierunku osi obrotu obracającego się ciała. Oś obraca się wtedy zakreślając
powierzchnię stożkową.
11. Wektor prędkości kątowej
W ruchu obrotowym bryły sztywnej istnieje jednoznacznie zdefiniowany wektor w ruchu o takiej
własnoci że dla każdego punktu bryły sztywnej wyznaczonego przez wektor wodzący jego prędkośd
(tego wektora w) dana jest wzorem
4. Zasada zachowania pędu w układzie N cząstek
P=p1+p2+…+pn
Całkowity pęd układu N cząstek zmienia się tylko pod wpływem sił zewnętrzych.
Dla sił zewnętrznych równych 0:
6. Zależnośd L od M
L=r x p
M=r x F
=(v x mv) + r x F = M
(v x mv w tym przypadku sie rowan zero co
trzeba napisad pod spodem w równaniu, a dlaczego tak jest to nei jestem pewien :P)
9. Przyspieszenie styczne i przyspieszenie normalne związek z krzywizną toru
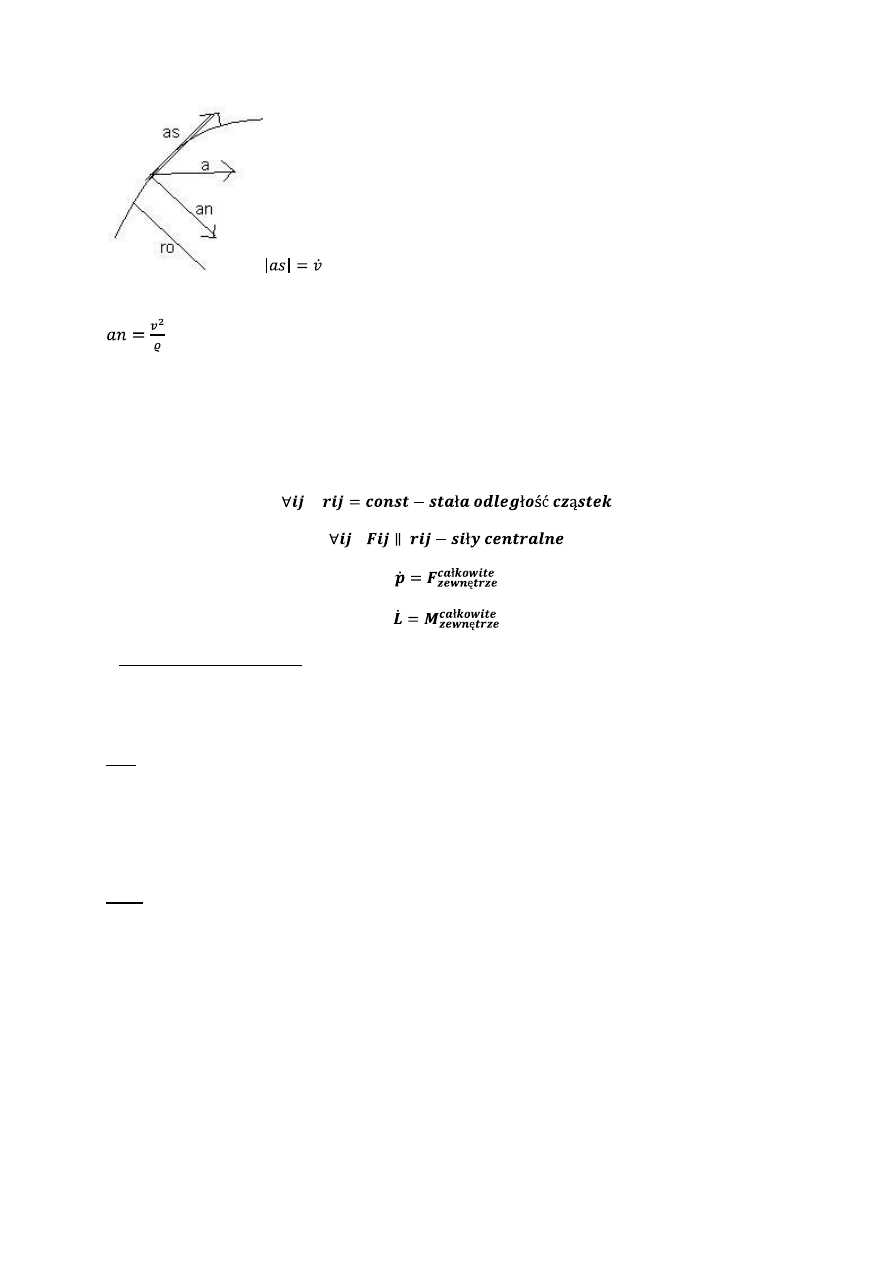
-przyspieszenie styczne (zmienia szybkośd)
- przyspieszenie normalne ( zmienia kierunek)
a=an+as ρ-promieo krzywizny toru
10. definicja bryły sztywnej
Jest to układ N cząstek spełniający dwie własności
3.I zasada dynamiki Newtona
W inercialnym układie odniesienia cząstka na którą nie działa żadna siła lub siły się równoważą
porusza sięruchem jednostajnym prostoliniowym
IzdN
W inercialnym układie odniesienia przyspieszenie cząstki jest wprost proporcjonalne do działającej na
nią siły i odwrotnie proporcjonalne do jej masy
F=ma
IIIzdn
Jeśli cząsta A działa na cząstkę B siłą Fba to siła Fab którą działa cząsta B na cząstkęA jest jej równa co
do wartości i kierunku ale różna co do zwrotu.
Fab=-Fba
22. Zasada zachowania energii mechanicznej
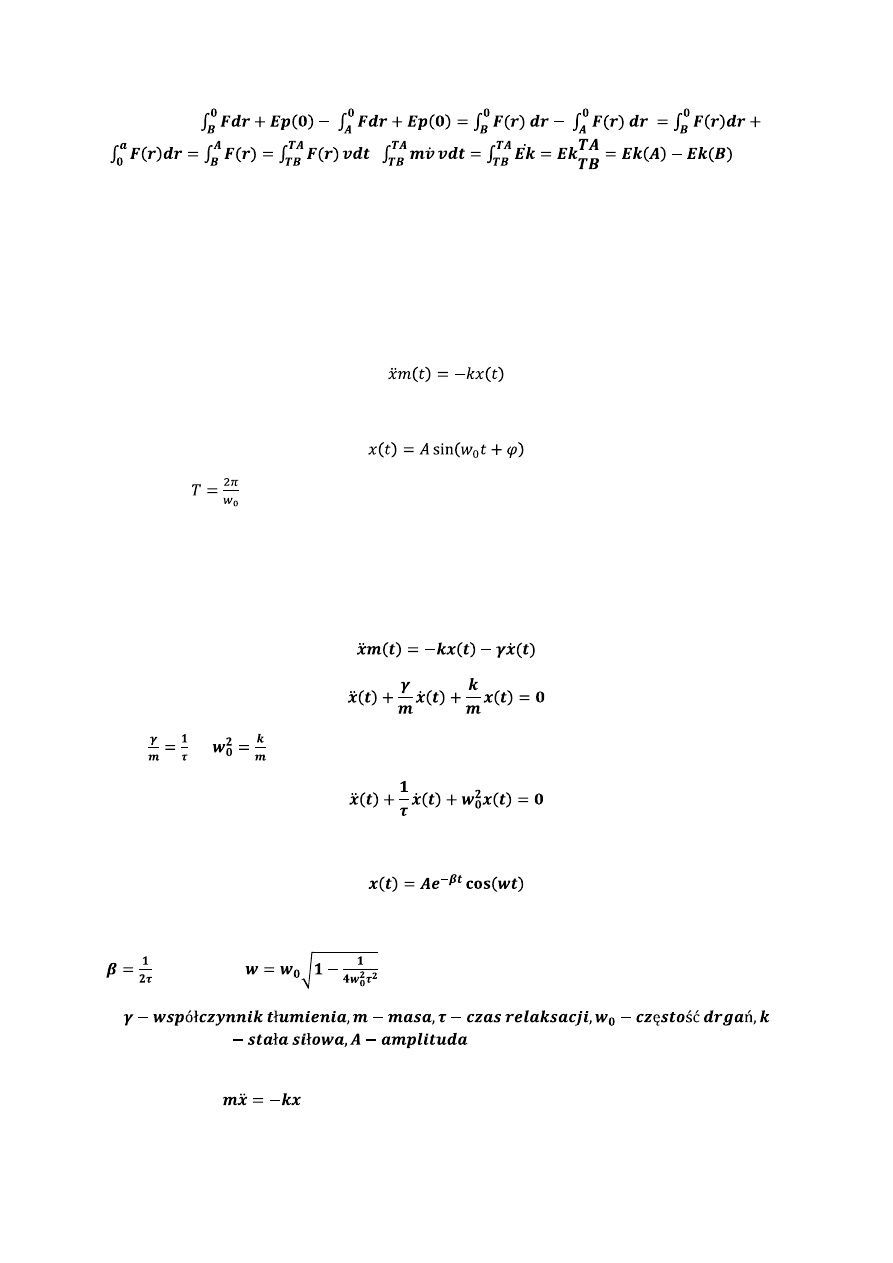
Ep(B)-Ep(A) =
=
Ep(B)+Ep(A) = Ek(A)+Ek(B)
Energia potencjalna to funkcja skalarna której gradient (ze znakiem minus) jest równy sile
opisującej określone pole
F=-gradEp (r)
9. Zwykły oscylator harmoniczny
Rozwiazanie:
Okres drgao
7. Tłumiony oscylator harmoniczny
Rownanie Newtona:
Gdzie
Rozwiązanie:
Gdzie:
Siła harmoniczna- siła proporcjonalna do wychylenia ciała z punktu równowagi skierowana do
poczatku układu
Warunki poczatkowe
8. Wymuszony OH
Rownanie Newtona:
Rozwiązanie
Rezonans
,x0 osiąga maximum dla częstości rezonansowej wrez
Rezonans polega na tym że amplituda drgao wymuszonych osiąga wartośd maksymalną
Czestośd rezonansowa-czestośd wymuszeo dla którego następuje wzrost amplitudy.
Przy słabym tłumieniu wrez jest prawie jak czestośd drgao swobodnych
w-czestośd siły wymuszającej,F0-diła wymuszająca, wrez-czestośd rezonansowa, x0-amplituda
17. Poszezone I prawo keplera
Masa zredukowana porusza się po krzywych stozkowych a srodek masy znajduje się w ognisku
krzywych stozkowych
Uogulnione- planety poruszaja się po torach eliptycznych a w ognisku tych elips jest slonce.
5. zasada zachowania energi mechanicznej Nczastek (bez dowodu)
Ek+Ep = const
16.
Każda czasta przyciaga kazda inna czastke siła grawitacyjna o wartosci
Zasada superpozycji.
Całkowita siła działająca na czastke jest suma wektorowa sił pochodzacych od innych czastek
Wartosc stałej grawitacyjnej z jednotka
18. Udowodnienie III prawa keplera
19. Udowodnienei II prawa keplera
S-powierzchnia zakreślana przez promieo wodzący planety
- masa zredukowana, T –okres, p-parametr krzywej stożkowej
12. Środek masy układu N czastek
Można wyznaczyd wektor wodzący środka masy dany rowaniem
1,b opis predkosci przyspieszenia sredniego i chwilowego ( limesy, delty i te sprawy)
20. Prawo hooka
F-siła
S-pole
l-długosc poczatkowa
–wydluzenie
E-moduł younga (wielkośd uzależniajaca odksztalcenie liniowe od naprezenia, stała materiałowa)
Odksztalcenie ciała pod wpływem siły jest wprost proporcjonalne do tej siły
21. wspolczynnik poissona- okresla w jaki sposób odksztalca się ciało
- odksztalcenie na szerokosc (width)
- odksztalcenie na wysokosc (height)
Wyszukiwarka
Podobne podstrony:
Mechanika techniczna(12)
Mechanika Semest I pytania egz
wykl 8 Mechanizmy
mechanizm mycia i prania
MECHANIKA II DYN
METODY KOMPUTEROWE W MECHANICE 2
08 BIOCHEMIA mechanizmy adaptac mikroor ANG 2id 7389 ppt
Mechanizm obrzęków
Mechanizmy swoistej immunoterapii alergii 3
mechanika kwantowa
Mechanizmy nadwrażliwości
Mechanika górotworu cz 3
Szkol Uszkodzenie ciała przez czynniki mechaniczne
więcej podobnych podstron