4. ELEMENTY PŁASKIEGO STANU NAPRĘŻEŃ I ODKSZTAŁCEŃ
1
4.
4. ELEMENTY PŁASKIEGO STANU NAPRĘŻEŃ I ODKSZTAŁCEŃ
4.1. Elementy trójkątne
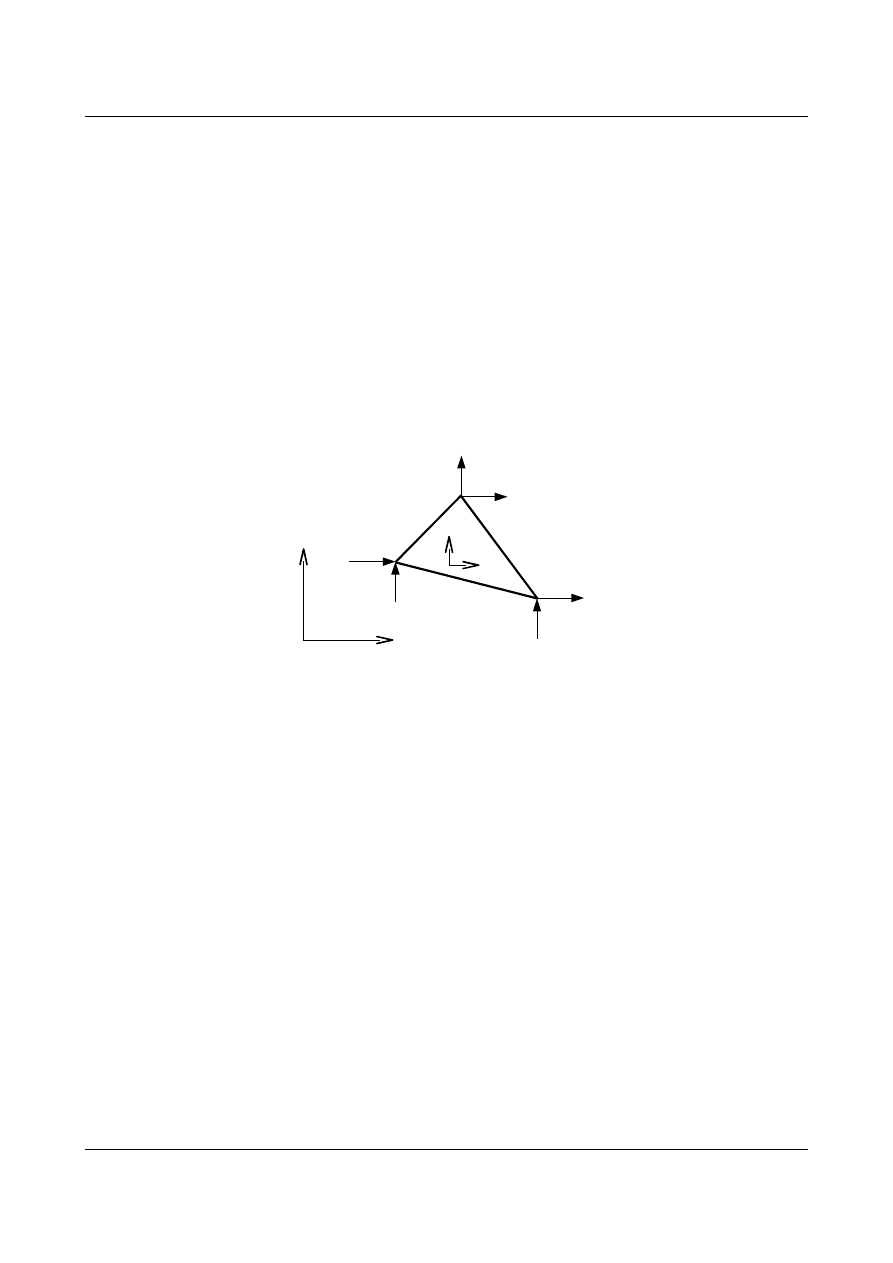
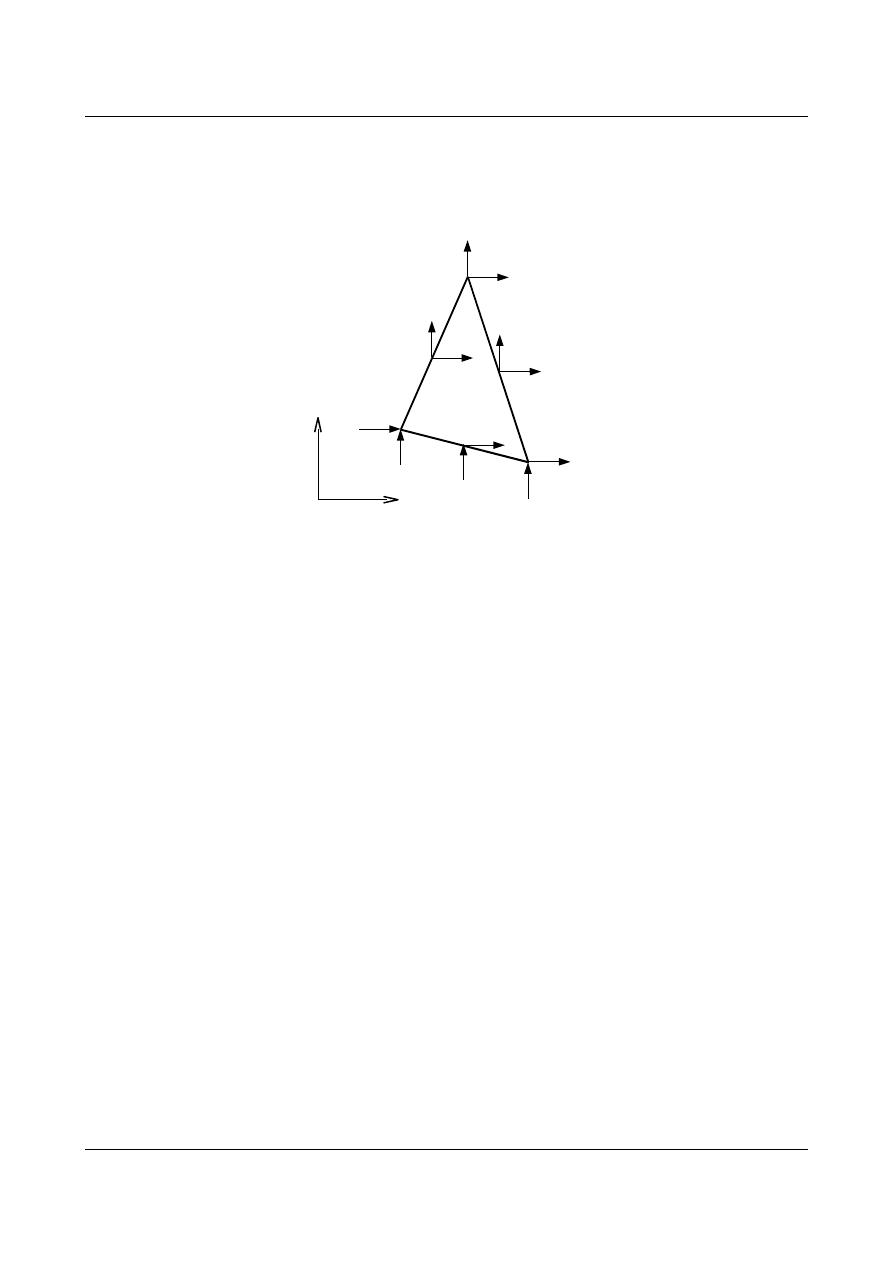
Do opisywania dwuwymiarowego kontinuum jako jeden z pierwszych elementów zastosowano
element trójkątny nazywany skrótem CST (Constant Strain Triangle). W elemencie tym wyróżnić możemy
trzy węzły (zobrazowane poprzez wierzchołki trójkąta), które mają po dwa translacyjne stopnie swobody.
Tak więc przemieszczenie dowolnego punktu elementu opisywać będziemy w układzie x0y za pomocą
dwóch składowych, które oznaczymy u i v. Kolejne przemieszczenia węzłowe oznaczymy przez d
1
do d
6
.
Odpowiadają one stopniom swobody oznaczonym na rysunku poniżej
Rys. 4.1. Element trójwęzłowy
Wektor przemieszczeń d, który opisuje deformację elementu, składa się z następujących składowych
d
=[d
1
, d
2
, d
3
, d
4
, d
5
, d
6
,
]
T
=[u
1
, v
2
, u
3
, v
4
, u
5
, v
6
,
]
T
(4.1)
Możemy przyjąć funkcje, które będą opisywać wielkości przemieszczeń u i v w postaci liniowo
zależnej od x i y:
u
=c
1
c
2
x
c
3
y
v
=c
4
c
5
x
c
6
y
(4.2)
W postaci macierzowej założoną aproksymację zmian wektora przemieszczeń
u
=[u , v]
T
możemy
zapisać
u
=gc
(4.3)
gdzie c jest wektorem stałych c
i
(na razie nieznanych), natomiast macierz geometryczna g ma postać
g
=
[
1 x y 0 0 0
0 0 0 1 x y
]
(4.4)
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
i
k
i
j
x
y
v
jk
v
ij
v
ik
u
v
d
1
d
2
d
3
d
4
d
5
d
6
4. ELEMENTY PŁASKIEGO STANU NAPRĘŻEŃ I ODKSZTAŁCEŃ
2
Jeśli podstawimy warunki brzegowe, to znaczy porównamy przemieszczenia u i v odpowiednio do
przemieszczeń węzłów w punktach i, j, k otrzymamy macierz h postaci:
h
=
[
g
i
g
j
g
k
]
=
[
1 x
i
y
i
0 0 0
0 0 0 1 x
i
y
i
1 x
j
y
j
0 0 0
0 0 0 1 x
j
y
j
1 x
k
y
k
0 0 0
0 0 0 1 x
k
y
k
]
(4.5)
która spełnia poniższe równanie macierzowe:
d
=hc
(4.6)
Z równania tego wyznaczamy wartości stałych c
i
przez znalezienie macierzy odwrotnej
h
−1
:
h
−1
=
1
2 A
ijk
[
x
j
y
k
−x
k
y
j
0
x
k
y
i
−x
i
y
k
0
x
i
y
j
−x
j
y
i
0
−y
jk
0
−y
kj
0
−y
ij
0
x
jk
0
x
kj
0
x
ij
0
0
x
j
y
k
−x
k
y
j
0
x
k
y
i
−x
i
y
k
0
x
i
y
j
−x
j
y
i
0
−y
jk
0
−y
ki
0
−y
ij
0
x
jk
0
x
ki
0
x
ij
]
(4.7)
Wpływ jednostkowego przemieszczenia w węzłach na przemieszczenia wszystkich punktów na
obszarze elementu
x
ij
=x
j
−x
i
y
ki
= y
i
− y
k
(4.8)
Funkcja kształtu jest funkcją liniową.
2 A
ijk
=∣podwójne pole powierzchni trójkąta∣=det
[
1 x
i
y
i
1 x
j
y
j
1 x
k
y
k
]
=x
ij
y
ik
−x
ik
y
ij
(4.9)
Macierz funkcji kształtu ma więc postać:
N
=gh
−1
=
[
N
1
0
N
2
0
N
3
0
0
N
1
0
N
2
0
N
3
]
(4.10)
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
4. ELEMENTY PŁASKIEGO STANU NAPRĘŻEŃ I ODKSZTAŁCEŃ
3
gdzie odpowiednie funkcje wyrażają się następującymi wzorami
N
1
=
1
2 A
ijk
x
j
y
k
−x
k
y
j
− y
jk
x
x
jk
y
(4.11)
N
2
=
1
2 A
ijk
x
k
y
i
−x
i
y
k
− y
ki
x
x
ki
y
(4.12)
N
3
=
1
2 A
ijk
x
i
y
j
−x
j
y
i
− y
ij
x
x
ij
y
(4.13)
Zależność pomiędzy przemieszczeniami węzłów d a odkształceniami elementu otrzymamy wykonując
działanie pokazane poniżej
B
=L N =
[
∂
∂ x
0
0
∂
∂ y
∂
∂ y
∂
∂ x
]
N
=
1
2 A
ijk
[
−y
jk
0
−y
ki
0
−y
ij
0
0
x
jk
0
x
ki
0
x
ij
x
jk
−y
jk
x
ki
−y
ki
x
ij
−y
ij
]
(4.14)
=Bd
(4.15)
Jeśli założymy, że mamy do czynienia z materiałem izotropowym możemy macierz konstytutywną
zapisać
D
=
E
1e
2
[
e
1
0
e
1
0
0
0 e
3
]
(4.16)
Gdzie przyjęte stałe
e
i
są równe:
➔
dla płaskiego stanu naprężenia
e
1
=1
e
2
=1−
e
3
=
e
2
2
(4.17)
➔
dla płaskiego stanu odkształcenia
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
4. ELEMENTY PŁASKIEGO STANU NAPRĘŻEŃ I ODKSZTAŁCEŃ
4
e
1
=1−
e
2
=1−2
e
3
=
e
2
2
(4.18)
Macierz sztywności elementu CST
K
=
∫
V
B
T
DB dV
=B
T
DBA
ijk
t
=K
1
K
2
(4.19)
gdzie przez t oznaczono grubość elementu, zaś macierze K
1
i K
2
zawierają wyrazy wywodzące się
odpowiednio tylko z odkształceń normalnych i ścinających:
K
1
=e
4
[
e
1
y
jk
2
− x
jk
y
jk
e
1
x
jk
2
e
1
y
ki
y
jk
− x
jk
y
ki
e
1
y
ki
2
− x
ki
y
jk
e
1
x
ki
x
jk
− x
ki
y
ki
e
1
x
ki
2
e
1
y
ij
y
jk
− x
jk
y
ij
e
1
y
ij
y
ki
− x
ki
y
ij
e
1
y
ij
2
− x
ij
y
jk
e
1
x
ij
x
jk
− x
ij
y
ki
e
1
x
ij
x
ki
− x
ij
y
ij
e
1
x
ij
2
]
(4.20)
K
2
=e
4
[
x
jk
2
−x
jk
y
jk
y
jk
2
x
ki
x
jk
−x
ki
y
jk
x
ki
2
−x
jk
y
ki
y
ki
y
jk
−x
ki
y
ki
y
ki
2
x
ij
x
jk
−x
ij
y
jk
x
ij
x
ki
−x
ij
y
ki
x
ij
2
−x
jk
y
ij
y
ij
y
jk
−x
ki
y
ij
y
ij
y
ki
−x
ij
y
ij
y
ij
2
]
(4.21)
Powyższe macierze są macierzami symetrycznymi .
We wzorach na K
1
i K
2
wzorach przyjęto następujące oznaczenia
e
4
=
Et
4 A
ijk
1e
2
[
e
1
0
e
1
0
0
0 e
3
]
e
5
=e
4
=e
3
(4.22)
4.2. Element skończony trójkątny sześciowęzłowy
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
4. ELEMENTY PŁASKIEGO STANU NAPRĘŻEŃ I ODKSZTAŁCEŃ
5
Do analizy płaskich stanów naprężenia i odkształcenia możemy posłużyć się również
sześciowęzłowym elementem trójkątnym, który w literaturze jest w skrócie nazywany LST (Linear Strain
Triangle). Element ten przedstawia poniższy rysunek:
Rys. 4.2. Element sześciowęzłowy
Wektor przemieszczeń węzłowy możemy zapisać jako
d
=
[
u
1
u
2
u
3
u
4
u
5
u
6
v
1
v
2
v
3
v
4
v
5
v
6
]
T
(4.23)
Wektor przemieszczenia dowolnego punktu elementu określony jest przy pomocy dwóch składowych:
u=
[
u v
]
T
. Natomiast aproksymację każdej ze składowych przyjmuje się w postaci
u
=c
1
c
2
x
c
3
y
c
4
x
2
c
5
xy
c
6
y
2
v
=c
7
c
8
x
c
9
y
c
10
x
2
c
11
xy
c
12
y
2
(4.24)
Wektor odkształcenia możemy wyrazić jako funkcję przemieszczeń węzłów
=
[
x
y
xy
]
=
[
B
x
0
0
B
y
B
y
B
x
]
=
[
u
v
]
=Bd
(4.25)
Poszczególne wektory można zapisać następująco
x
=
[
x1
x2
x3
]
y
=
[
y1
y2
y3
]
xy
=
[
xy1
xy2
xy3
]
(4.26)
Zastosowane macierze B
i
wyrazić można jako
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
1
2
x
y
u
1
v
1
u
2
v
2
u
3
v
3
u
6
v
6
u
5
v
5
u
4
v
4
4
6
3
5
4. ELEMENTY PŁASKIEGO STANU NAPRĘŻEŃ I ODKSZTAŁCEŃ
6
B
x
=
1
2 A
[
3 y
32
−y
13
−y
21
4 y
13
0
4 y
21
−y
32
3 y
13
−y
21
4 y
32
4 y
21
0
−y
32
−y
13
3 y
21
0
4 y
13
4 y
32
]
(4.27)
B
y
=
1
2 A
[
3 x
23
−x
31
−x
12
4 x
31
0
4 x
12
−x
23
3 x
31
−x
12
4 x
23
4 x
12
0
−x
23
−x
31
3 x
12
0
4 x
31
4 x
23
]
(4.28)
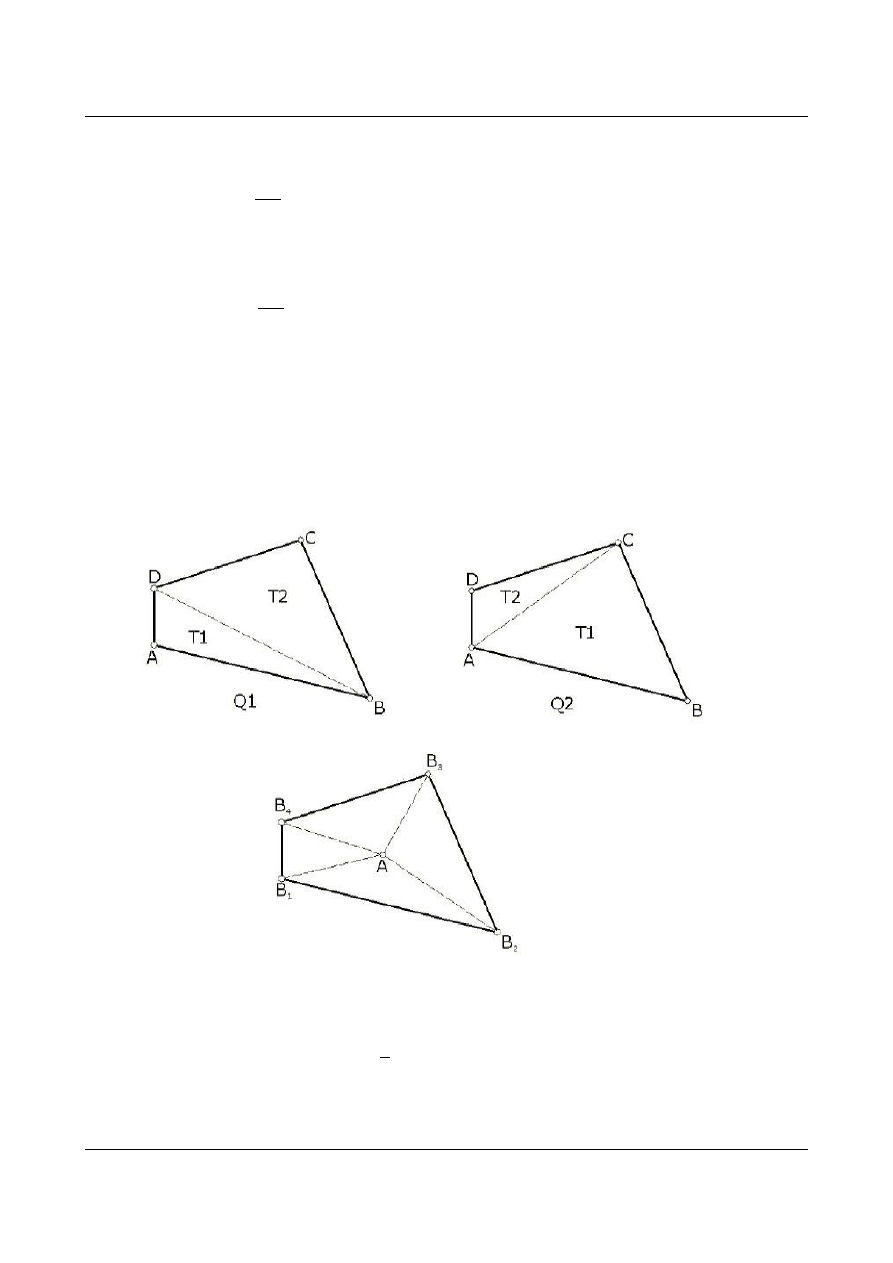
4.3. Kondensacja statyczna
Kondensacja statyczna polega na tworzeniu elementu czterokątnego z elementów trójkątnych
(suma dwóch trójkątnych).
K
Qi
=K
T
1
K
T
2
i
=1 , 2
(4.29)
K
0
=
1
2
[ K
Q
1
K
Q
2
]
(4.30)
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater

4. ELEMENTY PŁASKIEGO STANU NAPRĘŻEŃ I ODKSZTAŁCEŃ
7
[
K
AA
K
AB
K
BA
K
BB
]
⋅
[
d
A
d
B
]
=
[
p
A
p
B
]
(4.31)
K
AA
⋅d
A
K
AB
⋅d
B
= p
A
K
BA
⋅d
A
K
BB
⋅d
B
= p
B
(4.32)
Po odpowiednich przekształceniach doprowadzamy wzory do postaci
K
BA
⋅K
AA
−1
⋅ p
A
−K
AB
⋅d
B
K
BB
⋅d
B
= p
B
K
BB
−K
BA
⋅K
AA
−1
⋅K
AB
⋅d
B
= p
B
−K
BA
⋅K
AA
−1
⋅p
A
(4.33)
co skracamy do postaci
K
BB
✶
⋅d
B
= p
B
✶
(4.34)
Dokładność macierzy sztywności zależy od dyskretyzacji, otrzymujemy wynik przybliżony.
Tylko wtedy gdy obciążenia przyłożymy w węzłach, funkcja kształtu trzeciego stopnia
v
x=a
1
a
2
x
a
3
x
2
a
4
x
3
(4.35)
Jest prawdziwą i dokładną funkcją rozwiązującą dane równanie różniczkowe. Funkcja momentów na
danym odcinku jest liniowa.
d
2
w
d x
2
=±
M
x
EI
(4.36)
Kondensacja statyczna polega na dodaniu do siebie prostych elementów po to aby tworzyć bardziej
złożone. Składanie czworokąta z trójkątów to dodanie odpowiednich sztywności.(RYSUNKI). Dochodzenie
do macierzy sztywności elementu czworokątnego może odbywać się w różny sposób. Element czworokątny
o węzłach 1,2,3,4 można złożyć z dwóch trójkątów 4,1,2 i 4,3,2 lub 1,4,3 i 1,2,3.
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
Wyszukiwarka
Podobne podstrony:
07 Z Teoria stanu naprężenia i odkształcenia
2 Analiza stanu naprezenia i odksztalcenia w punkcie
Analiza stanu naprężenia i odkształcenia
03 Plaski stan naprezenia i odksztalcenia
2 Analiza stanu naprężenia i odkształcenia w punkcie
Analiza plaskiego stanu napreze Nieznany
06 Z Teoria stanu naprężenia i odkształcenia
ANALIZA STANU NAPRĘŻENIA I ODKSZTAŁCENIA, Budownictwo, semestr 4, Mechanika Budowli
2 Analiza stanu naprężenia i odkształcenia w punkcie (1)
07 Z Teoria stanu naprężenia i odkształcenia
więcej podobnych podstron