4-1
4. Warunki brzegowe i zależności energetyczne w polu EM
4.1. Warunki brzegowe na powierzchniach rozgraniczających dwa różne
ośrodki
Najwygodniejszą podstawę do otrzymania związków między składowymi
stycznymi i normalnymi (do powierzchni granicznej) pól EM po obu stro-
nach powierzchni rozgraniczającej dwa różne ośrodki stanowi całkowa po-
stać równań Maxwella. Rozważmy dwa równania
d
d
C
S
t
∂
⎛
⎞
⋅ =
+
⋅
⎜
⎟
∂
⎝
⎠
∫
∫
D
H l
J
s
v
(prawo Ampére’a z poprawką Maxwella) (4.1)
d
d
C
S
t
∂
⋅ = −
⋅
∂
∫
∫
B
E l
s
v
(prawo
Faradaya)
(4.2)
Dopuszczamy możliwość istnienia ładunku powierzchniowego ρ
S
[C/m
2
]
i powierzchniowej gęstości prądu J
S
[A/m] na rozgraniczającej po-
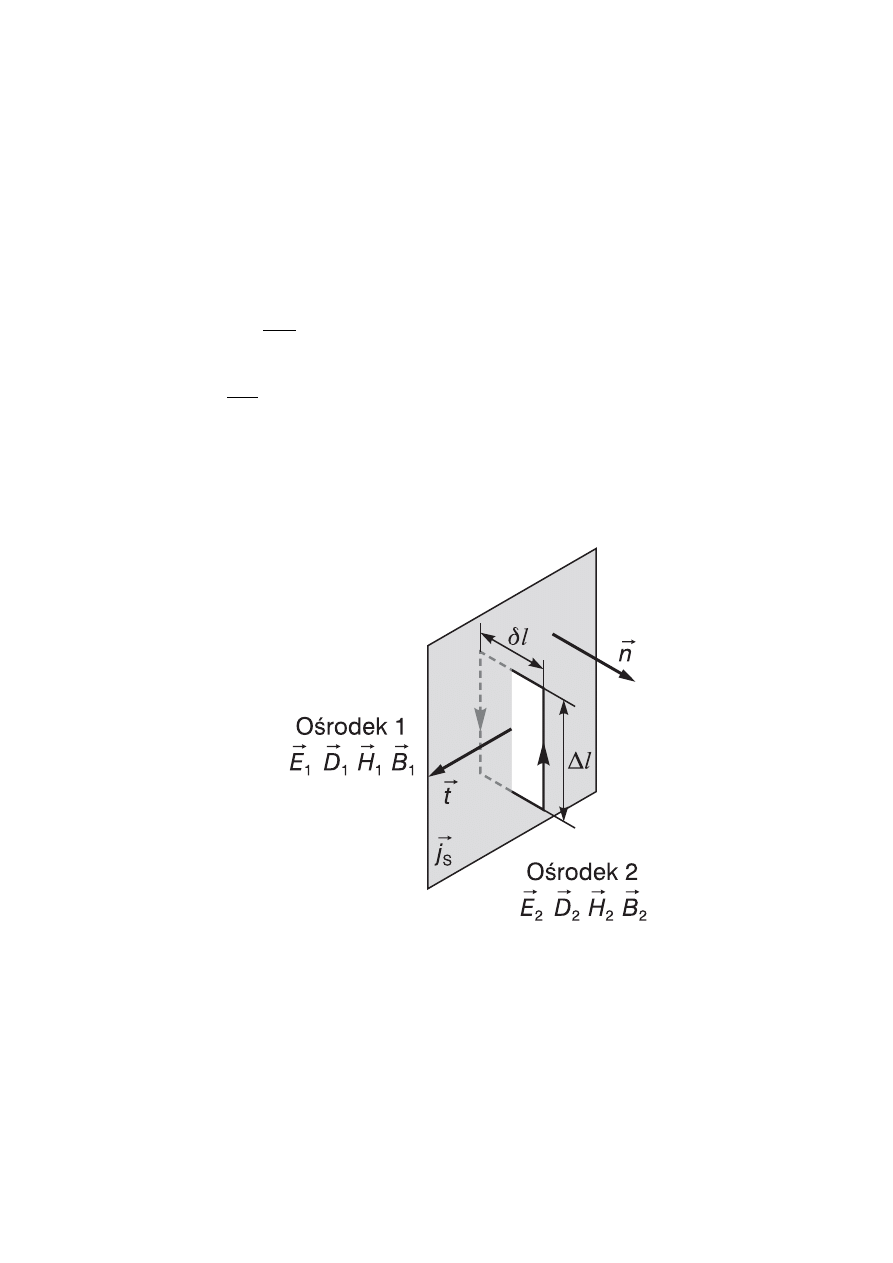
wierzchni. Odpowiednia konstrukcja geometryczna pokazana jest na ry-
sunku 4.1.
Rys. 4.1. Infinitezymalnie cienki kontur C
będący brzegiem powierzchni S.
Wektor ˆn jest jednostkowym wektorem normalnym do powierzchni roz-
graniczającej dwa ośrodki (skierowanym od ośrodka 1 do 2), wektor
ˆt
jest
jednostkowym wektorem normalnym do powierzchni S ograniczonej
krzywą C. Zakładamy, że rozmiary liniowe krzywej C są na tyle małe, że
całki można zastąpić odpowiednimi iloczynami, ponadto
l
l
δ
<< Δ
(4.3)
4-2
W całkach po dłuższych bokach prostokąta we wzorach (4.1) i (4.2) infini-
tezymalny przyrost dl zapisujemy w postaci
ˆ ˆ
d
dl
= ×
l t n
w ośrodku 2
(4.4a)
ˆ ˆ
d
dl
= − ×
l
t n
w ośrodku 1
(4.4b)
Rozpatrzmy najpierw wzór (4.2). W całce konturowej po lewej stronie
wzoru możemy pominąć wkład od krótszych boków ze względu na waru-
nek (4.3) co daje
2
1
2
1
ˆ
ˆ
ˆ
ˆ
(
) (
)
[
(
)]
l
l
−
⋅ × Δ = ⋅ ×
−
Δ
E
E
t n
t n
E
E
. (4.5)
Skorzystaliśmy z tożsamości wektorowej
(
)
(
)
(
)
⋅ × = ⋅ × = ⋅ ×
a b c
b c a
c a b
.
Prawa strona wzoru (4.2) przyjmie postać
ˆ l l
t
δ
∂
−
⋅
Δ
∂
B
t
(4.6)
W granicy
0
l
δ
→ wyrażenie to zeruje się i otrzymujemy
2
1
ˆ ˆ
[
(
)] 0
⋅ ×
−
=
t n
E
E
(4.7)
Wyrażenie (4.7) jest słuszne dla dowolnego położenia prostokątnego kon-
turu, aby tylko związany z konturem wektor
ˆ
t
pozostawał nadal prostopa-
dły do ˆn, co jest możliwe wtedy i tylko wtedy gdy
2
1
ˆ (
) 0
×
−
=
n
E
E
(4.8)
Identyczne rozważania możemy przeprowadzić dla pól magnetycznych
opisanych równaniem (4.1). W tym przypadku wygodnie jest przyjąć, że
przez powierzchnię konturu S może płynąć prąd nawet gdy
0
l
δ
→ . Prąd
ten określa wektor powierzchniowej gęstości prądu J
S
. Tak więc
2
1
S
ˆ
ˆ
ˆ
[
(
)] l
l
⋅ ×
−
Δ =
⋅ Δ
t n
H
H
J t
(4.9)
Wyrażenie to jest słuszne dla dowolnego wektora ˆt prostopadłego do ˆn,
stąd otrzymujemy warunek brzegowy dla pól magnetycznych
2
1
S
ˆ (
)
×
−
=
n
H
H
J
(4.10)
4-3
Rozważamy teraz pozostałe dwa równania Maxwella
d
d
S
V
Q
V
ρ
⋅
= =
∫
∫
D s
v
(prawo
Gaussa)
(4.11)
d
0
S
⋅
=
∫
B s
v
(bez
nazwy)
(4.12)
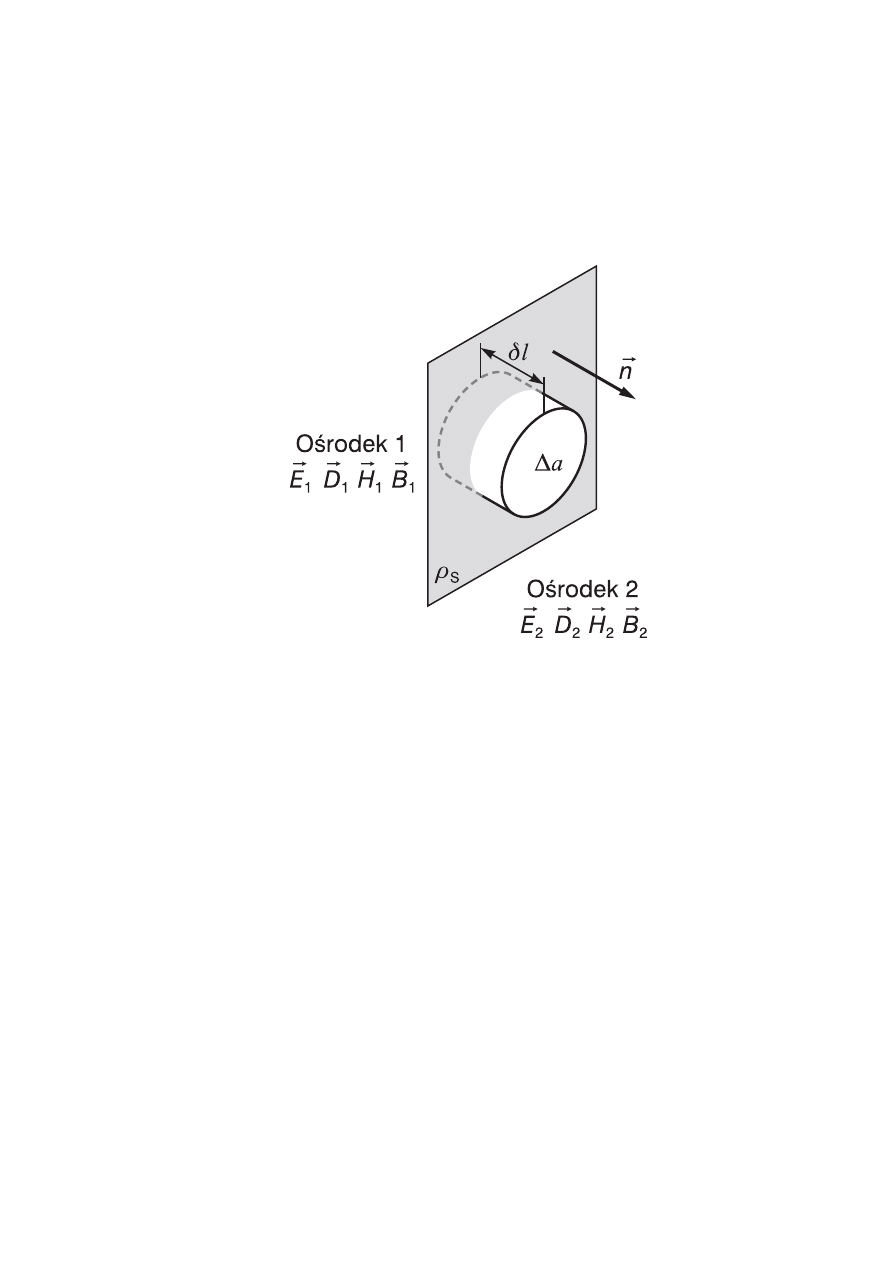
Przeanalizujmy pola w walcowej objętości V (o powierzchni S) przedsta-
wionej na rys. 4.2.
Rys. 4.2. Obszar całkowania V ograniczony powierzchnią cylindryczną S.
Δa jest powierzchnią podstawy walca.
Z równania (4.11) przyjmując
0
l
δ
→ otrzymamy
2
1
S
ˆ
(
)
a
a
ρ
−
⋅ Δ = Δ
D
D
n
(4.13)
gdzie ρ
S
jest gęstością ładunku powierzchniowego rozumianego podobnie
jak powierzchniowa gęstość prądu.
Ostatecznie otrzymujemy kolejny warunek brzegowy dla pola elektrycz-
nego
2
1
S
ˆ
(
)
ρ
−
⋅ =
D
D
n
(4.14)
Natomiast dla pola magnetycznego z równania (4.12) mamy
2
1
ˆ
(
)
0
−
⋅ =
B
B
n
(4.15)

4-4
Podsumowanie
Warunków granicznych używa się do powiązania ze sobą równań
Maxwella opisujących różne obszary. Otrzymujemy w ten sposób przebieg
pól w całej przestrzeni.
Wzory do zapamiętania (uwaga: normalna ˆn skierowana jest od
ośrodka 1 do 2)
2
1
ˆ (
) 0
×
−
=
n
E
E
(4.16)
2
1
S
ˆ (
)
×
−
=
n
H
H
J
(4.17)
2
1
S
ˆ
(
)
ρ
−
⋅ =
D
D
n
(4.18)
2
1
ˆ
(
)
0
−
⋅ =
B
B
n
(4.19)
Rozkładając wektory na składowe styczne do powierzchni granicznej
(z indeksem „t” – ang. tangential) oraz prostopadłe do tej powierzchni
(z indeksem „n” – ang. normal) można podać warunki równoważne wzo-
rom (4.16):
• dla składowych stycznych pól
2t
1t
0
−
=
E
E
(4.20a)
2t
1t
S
−
=
H
H
J
(4.20b)
• oraz dla składowych normalnych pól
2n
1n
S
D
D
ρ
−
=
(4.20c)
2n
1n
0
B
B
−
= (4.20d)
Przykład. Napisać warunki brzegowe dla pól zmiennych w czasie na
granicy dielektryka (ośrodek 1) i idealnego przewodnika (ośrodek 2).
W ośrodku 2 pole elektryczne musi być równe zeru, gdyż w przeciw-
nym przypadku wywoływałoby przepływ prądu o nieskończonym natęże-
niu ( J
E
σ
=
). Podobnie nie może istnieć zmienne pole magnetyczne, gdyż
zgodnie z prawem Faradaya wywoływałoby pole elektryczne co jest
sprzeczne z poprzednią tezą. Stąd warunki brzegowe przyjmą postać
t1
0
=
E
t1
S
= −
H
J
n1
S
D
ρ
= −
n1
0
B
=
Stąd wynika, że pole elektryczne jest prostopadłe, a pole magnetyczne
równoległe do granicy.
4-5
4.2. Zależności energetyczne w polu elektromagnetycznym
Żadna teoria propagacji fal nie może być uważana za kompletną jeśli nie
sformułuje się zasady zachowania energii. Powinna ona przedstawiać za-
leżności między mocą dostarczaną przez źródło fal, mocą traconą na sku-
tek dyssypacji, szybkością zmian energii magazynowanej w polu falowym
i strumieniem mocy fal. W teorii pola elektromagnetycznego relacja tego
rodzaju jest nazywana twierdzeniem Poyntinga.
Twierdzenie Poyntinga w postaci rzeczywistej
Zapiszmy równania Maxwella dla pól rzeczywistych
t
∂
∇ × = +
∂
D
H J
(4.21)
t
∂
∇ × = −
∂
B
E
(4.22)
Po pomnożeniu pierwszego z nich przez wektor E a drugiego przez wektor
H i odjęciu pierwszego od drugiego otrzymamy
t
t
∂
∂
⋅ ∇ × − ⋅∇ × = − ⋅
− ⋅
− ⋅
∂
∂
B
D
H
E E
H
H
E
E J
(4.23)
Korzystając z tożsamości wektorowej (por. tabela 1.2)
(
)
∇ ⋅
×
= ⋅ ∇ × − ⋅∇ ×
E H
H
E E
H
(4.24)
otrzymujemy postać różniczkową twierdzenia Poyntinga
(
)
0
t
t
∂
∂
∇ ⋅
×
+ ⋅
+ ⋅
+ ⋅ =
∂
∂
B
D
E H
H
E
E J
(4.25)
Całkując (4.25) po objętości V i stosując twierdzenia Gaussa
(
)d
d
V
S
V
∇ ⋅
=
⋅
∫
∫
v
v s
v
uzyskujemy całkową postać twierdzenia Poyntinga
(
) d
d
d
0
S
V
V
V
V
t
t
∂
∂
⎛
⎞
×
⋅ +
⋅
+ ⋅
+
⋅
=
⎜
⎟
∂
∂
⎝
⎠
∫
∫
∫
B
D
E H
s
H
E
E J
v
(4.26)
gdzie S jest zamkniętą powierzchnią obejmującą objętość V.
Interpretacja fizyczna: Pierwsza całka przedstawia moc dostarczaną do
układu z zewnątrz. Druga całka wyraża szybkość zmian energii magazy-
nowanej w układzie. Trzecia całka wyraża moc traconą w układzie na sku-
tek przepływu prądu przewodzenia.
Problem: Dlaczego podejrzewamy, że równanie (4.26) opisuje bilans
energii w polu elektromagnetycznym? Wskazówka: Sprawdzić jed-
nostki dla poszczególnych składników równania (E [V/m], H [A/m],
D [C/m
2
], B [Wb/m
2
= V·s/m
2
], J
0
[A/m
2
]).
4-6
Straty w polu elektromagnetycznym (dyssypacja energii)
Zinterpretowanie poszczególnych członów wzoru (4.26) zaczniemy od
trzeciej całki.
Dla pojedynczego ładunku q dostarczana mu moc P
q
(pochodna pracy
W po czasie t) przez pola elektromagnetyczne E i B wynosi
d
d
d
d
q
W
P
t
t
⋅
=
=
F l
(4.27)
gdzie: dl – infinitezymalne przesunięciem ładunku w czasie dt związane
z prędkością jego ruchu zależnością d
dt
=
l v
,
F – siła Lorentza określona wzorem
(
)
q
=
+ ×
F
E v B
.
Podstawiając powyższe zależności do wzoru (4.27) otrzymujemy
(
) d
d
q
q
t
P
q
t
+ ×
⋅
=
=
⋅
E v B v
E v
(4.28)
Pole magnetyczne nie wykonuje pracy gdyż siła magnetyczna jest prosto-
padła do prędkości.
Jeżeli mamy do czynienia z ciągłym rozkładem ładunku swobodnego
określonego gęstością ρ to we wzorze (4.28) zamiast q podstawimy
d
d
q
V
ρ
=
i całkujemy po skończonej objętości V, wtedy całkowita moc
dostarczona od pola ładunkom zawartym w tej objętości wynosi
d
d
q
V
V
P
V
V
ρ
=
⋅
=
⋅
∫
∫
E v
E J
(4.29)
W powyższym wzorze wykorzystano związek
ρ
=
v J
który wynika
z założenia, że ruch ładunków swobodnych powoduje powstanie odpo-
wiedniej swobodnej gęstości prądu J.
Ta moc odpowiada wielkości energii EM zamienianej w jednostce
czasu na energię mechaniczną lub cieplną. Musi być ona skompensowana
przez równe jej w jednostce czasu straty energii pola EM w objętości V.
Wprowadza się pojęcie objętościowej gęstości mocy strat wynikających
ze zjawiska przewodzenia
2
3
V A
W
m m
m
q
p
⎡
⎤
= ⋅
⋅
=
⎢
⎥
⎣
⎦
E J
(4.30)
która dla ośrodka izotropowego jest równa
2
q
p
E
σ
= ⋅ =
E J
(4.31)
4-7
Energia magazynowana w polach elektrycznym i magnetycznym
Zarówno w polu elektrycznym jak i magnetycznym magazynowana jest
pewna energia. Jest ona gromadzona w czasie wytwarzania pola i może
być potem wydatkowana, np. na pracę związaną z przesuwaniem ładun-
ków w polu elektrycznym. Podamy bez wyprowadzenia wzory służące do
obliczania tej energii. Założymy, że nasz ośrodek makroskopowy jest li-
niowy zarówno w odniesieniu do zjawisk elektrycznych, jak i magnetycz-
nych.
Energia pola elektrycznego gromadzona w elemencie objętości dV
jest równa
e
e
2
3
3
1
d
d
d
2
1
V C
VAs
J
2
m m
m
m
e
W
V
w V
w
=
⋅
=
⎡
⎤
=
⋅
⋅
=
=
⎢
⎥
⎣
⎦
E D
E D
(4.32)
przy czym w
e
jest nazywana objętościową gęstością energii pola elek-
trycznego.
Dla ośrodka izotropowego
2
e
1
2
w
E
ε
=
(4.33)
Podobnie energia pola magnetycznego gromadzona w elemencie ob-
jętości dV jest równa
m
m
m
2
3
3
1
d
d
d
2
1
A Wb
AVs
J
2
m m
m
m
W
V
w V
w
=
⋅
=
⎡
⎤
=
⋅
⋅
=
=
⎢
⎥
⎣
⎦
H B
H B
(4.34)
przy czym w
m
jest nazywana objętościową gęstością energii pola magne-
tycznego.
Dla ośrodka izotropowego
2
m
1
2
w
H
μ
=
(4.35)
Wykorzystując wyrażenia (4.32) i (4.34) możemy zdefiniować obję-
tościową gęstość energii całkowitej wzorem
e
m
1
(
)
2
u w
w
=
+
=
⋅ + ⋅
E D H B
(4.36)
4-8
Zauważając, że dla ośrodka liniowego zachodzą następujące tożsamości
1
(
)
2
t
t
∂
∂
=
⋅
∂
∂
D
E
E D
oraz
1
(
)
2
t
t
∂
∂
=
⋅
∂
∂
B
H
H B
(4.37)
stwierdzamy, że druga całka we wzorze (4.26) jest pochodną czasową cał-
kowitej energii pola elektromagnetycznego
d 1
d
(
)d
d
2
V
V
V
V
t
t
t
∂
∂
⎛
⎞
⋅
+ ⋅
=
⋅ + ⋅
⎜
⎟
∂
∂
⎝
⎠
∫
∫
B
D
H
E
E D H B
(4.38)
Wektor Poyntinga
Aby energia była zachowana pierwsza całka we wzorze (4.26) musi okre-
ślać moc dostarczoną do układu z zewnątrz. Wynika stąd, że wektorowa
wielkość nazywana wektorem Poyntinga
2
V A
W
m m
m
⎡
⎤
≡ ×
⋅
=
⎢
⎥
⎣
⎦
S E H
(7.19)
stanowi powierzchniową gęstość strumienia mocy przenoszoną przez pola
(falę elektromagnetyczną). Inaczej wektorem Poyntinga nazywamy ener-
gię przenoszoną przez pola w jednostce czasu na jednostkę powierzchni.
Twierdzenie Poyntinga dla pól harmonicznych (w postaci zespolonej)
Będziemy dalej opisywać harmoniczną zależność czasową wszystkich pól
i źródeł za pomocą czynnika
exp( j )
t
ω
, pisząc na przykład
j
j
*
j
1
2
( , ) Re
( )e
( )e
( )e
t
t
t
t
ω
ω
ω
−
⎡
⎤
⎡
⎤
=
≡
+
⎣
⎦
⎣
⎦
E r
E r
E r
E r
(7.20)
Przy tej konwencji pole ( )
E x
jest w ogólności polem zespolonym, a jego
amplituda i faza zmieniają się z położeniem. Dla iloczynów skalarnych ta-
kich jak
( , ) ( , )
q
p
t
t
=
⋅
E r
J r
, mamy wtedy
j
*
j
j
*
j
1
4
*
*
2j
*
2 j
1
4
( , ) ( , )
( )e
( )e
( )e
( )e
[ ( )
( )
( ) ( )
( ) ( )e
* ( ) ( )e
]
t
t
t
t
q
t
t
p
t
t
ω
ω
ω
ω
ω
ω
−
−
−
⎡
⎤ ⎡
⎤
=
⋅
=
+
⋅
+
=
⎣
⎦ ⎣
⎦
=
⋅
+
+
+
E r
J r
E r
E r
J r
J r
E r J r
E r J r
E r J r
E
r J r
(7.21)
W większości zagadnień interesują nas wartości średnie w czasie
0
1
( )d
T
q
q
T
p
p t t
T
=
∫
(7.22)
Wzór (7.21) zawiera dwa składniki zmienne w czasie, których wartość
średnia za okres wynosi zero, a więc
*
*
*
1
1
4
2
[ ( )
( )
( ) ( )
Re[ ( )
( )]
q T
p
=
⋅
+
=
⋅
E x J x
E x J x
E x J x
(7.23)
4-9
Widzimy stąd, że średnie czasowe dla iloczynów skalarnych równe są
połowie części rzeczywistej iloczynu skalarnego jednej z wielkości ze-
spolonych i sprzężenia zespolonego drugiej.
Dla pól harmonicznych równania Maxwella przyjmą postać
j
ω
∇ × = +
H J
D
(7.24)
j
ω
∇ × = −
E
B
(7.25)
ρ
∇ ⋅ =
D
(7.26)
0
∇ ⋅ =
B
(7.27)
gdzie zgodnie z prawą stroną zapisu (7.20) wszystkie występujące tu wiel-
kości są zespolonymi funkcjami położenia r.
Pierwsze z tych równań zapisujemy w postaci zespolonej sprzężonej,
mnożymy przez E i odejmujemy od drugiego pomnożonego przez H*.
Wykorzystując przytoczoną wyżej tożsamość wektorową uzyskujemy róż-
niczkowe twierdzenie Poyntinga w postaci zespolonej
(
*) j ( *
*)
* 0
ω
∇ ⋅
×
+
− ⋅
+ ⋅
=
E H
H B E D
E J
(7.28)
Całkując wyrażenie (7.28) po objętości V i stosując twierdzenia o dywer-
gencji (Gaussa) uzyskujemy całkową postać twierdzenia Poyntinga
(
)
(
*) d
j
*
* d
*d
0
S
V
V
V
V
ω
×
⋅ +
⋅ − ⋅
+
⋅
=
∫
∫
∫
E H
s
H B E D
E J
v
(7.29)
Zdefiniujemy teraz zespolony wektor Poyntinga
*
≡ ×
S E H
(7.30)
Podobnie jak dla iloczynów skalarnych średnie czasowe dla iloczynów
wektorowych równe są połowie części rzeczywistej iloczynu wektoro-
wego jednej z wielkości zespolonych i sprzężenia zespolonego drugiej.
Uśrednienie wektora Poyntinga za okres daje
1
2
( )
Re(
*)
T
t
=
×
S
E H
(7.31)
4-10
Wykazać, że średnia czasowa (po okresie) rzeczywistego wektor Poyn-
tinga jest równa połowie części rzeczywistej zespolonego wektora
Poyntinga
1
2
0
1
( , )
( , )d
Re[ ( , )]
T
T
t
t t
T
≡
=
∫
S r
S r
S r ω
(1)
Rozwiązanie
Rzeczywisty wektor Poyntinga definiuje się jako
( , )
( , )
( , )
t
t
t
=
×
S r
E r
H r
(2)
Zespolony wektor Poyntinga ma sens tylko dla fal monochromatycznych
(o jednej częstotliwości). Opisując zależność czasową wszystkich pól
i źródeł za pomocą czynnika
exp( j )
t
ω
, pisząc na przykład
j
j
j
1
2
( , ) Re
( , )e
( , )e
( , )e
t
t
t
t
∗
−
⎡
⎤
⎡
⎤
=
≡
+
⎣
⎦
⎣
⎦
E r
E r
E r
E r
ω
ω
ω
ω
ω
ω
(3)
j
j
j
1
2
( , ) Re
( , )e
( , )e
( , )e
t
t
t
t
∗
−
⎡
⎤
⎡
⎤
=
≡
+
⎣
⎦
⎣
⎦
H r
H r
H r
H r
ω
ω
ω
ω
ω
ω
(4)
można zdefiniować zespolony wektor Poyntinga
( , )
( , )
( , )
∗
=
×
S r
E r
H r
ω
ω
ω
(5)
W tej konwencji pola
( , )
E r ω
,
( , )
H r ω
są w ogólności polami zespolo-
nym, zależnymi od częstości
ω
a ich amplituda i faza zmieniają się
z położeniem. Rzeczywisty wektor Poyntinga (2) można zapisać jako
j
j
j
j
1
4
1
4
2j
2 j
1
4
( , )
( , )
( , )
( , )e
( , )e
( , )e
( , )e
[ ( , )
( , )
( , )
( , )]
[ ( , )
( , )e
( , )
( , )e
]
t
t
t
t
t
t
t
t
t
∗
−
∗
−
∗
∗
∗
∗
−
=
×
=
⎡
⎤ ⎡
⎤
=
+
×
+
=
⎣
⎦ ⎣
⎦
=
×
+
×
+
+
×
+
×
S r
E r
H r
E r
E r
H r
H r
E r
H r
E r
H r
E r
H r
E r
H r
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
(6)
Wzór (6) zawiera dwa składniki zmienne w czasie, których wartość
średnia za okres wynosi zero, a więc
1
4
1
1
2
2
( , )
[ ( , )
( , )
( , )
( , )]
Re[ ( , )
( , )]
Re[ ( , )]
T
t
∗
∗
∗
=
×
+
×
=
=
×
=
S r
E r
H r
E r
H r
E r
H r
S r
ω
ω
ω
ω
ω
ω
ω
(7)
To kończy dowód.
Wyszukiwarka
Podobne podstrony:
O 9 ?danie zależności emisji energetycznej żarówki od tem
O-9 - Badanie zależności emisji energetycznej żarówki od tem, Studia, Pracownie, I pracownia
O 9 ?danie zależności emisji energetycznej żarówki od tem
Zapotrzebowanie energetyczne w zależności od klimatu
GG 2007 2 25 WB Optymalna Oferta Energetyczna Dla Polski w XXI Wieku
Zapotrzebowanie energetyczne w zależności od strefy klimatycznej(1)
30 Struktury zaleznosci miedzy wskaznikami zrow rozw K Chmura
Polityka energetyczna (1)
Metodologia SPSS Zastosowanie komputerów Brzezicka Rotkiewicz Testy zależne
europejski system energetyczny doc
Wykład wb os 4
Energetyka jądrowa szanse czy zagrożenia dla Polski
Organizacja działu handlu zagranicznego w zależności od grup
rozwiazywanie zadan tekstowych wb
ENERGETYCZNE WYKORZYSTANIE BIOMASY
Pielęgniarstwo w intensywnej terapii w zależności od rodzaju zabiegu 2009
więcej podobnych podstron