Mechanisms
A mechanism is simply a device which takes an input motion and force, and outputs a different motion and force.
The point of a mechanism is to make the job easier to do. The mechanisms most commonly used in mechanical
systems are levers, linkages, cams, gears, and and pulleys.
Levers: 1
You need to know how to calculate the mechanical advantage obtained by using levers, the velocity ratio in levers
and pulley systems, and gear ratio and output speed when using gears.
A lever is the simplest kind of mechanism. There are three different types of lever. Common examples of each type
are the crowbar, the wheelbarrow and the pair of tweezers.
All levers are one of three types, usually called classes. The class of a lever depends on the relative position of
the load, effort and fulcrum:
• The load is the object you are trying to move.
• The effort is the force applied to move the load.
• The fulcrum (or pivot) is the point where the load is pivoted.
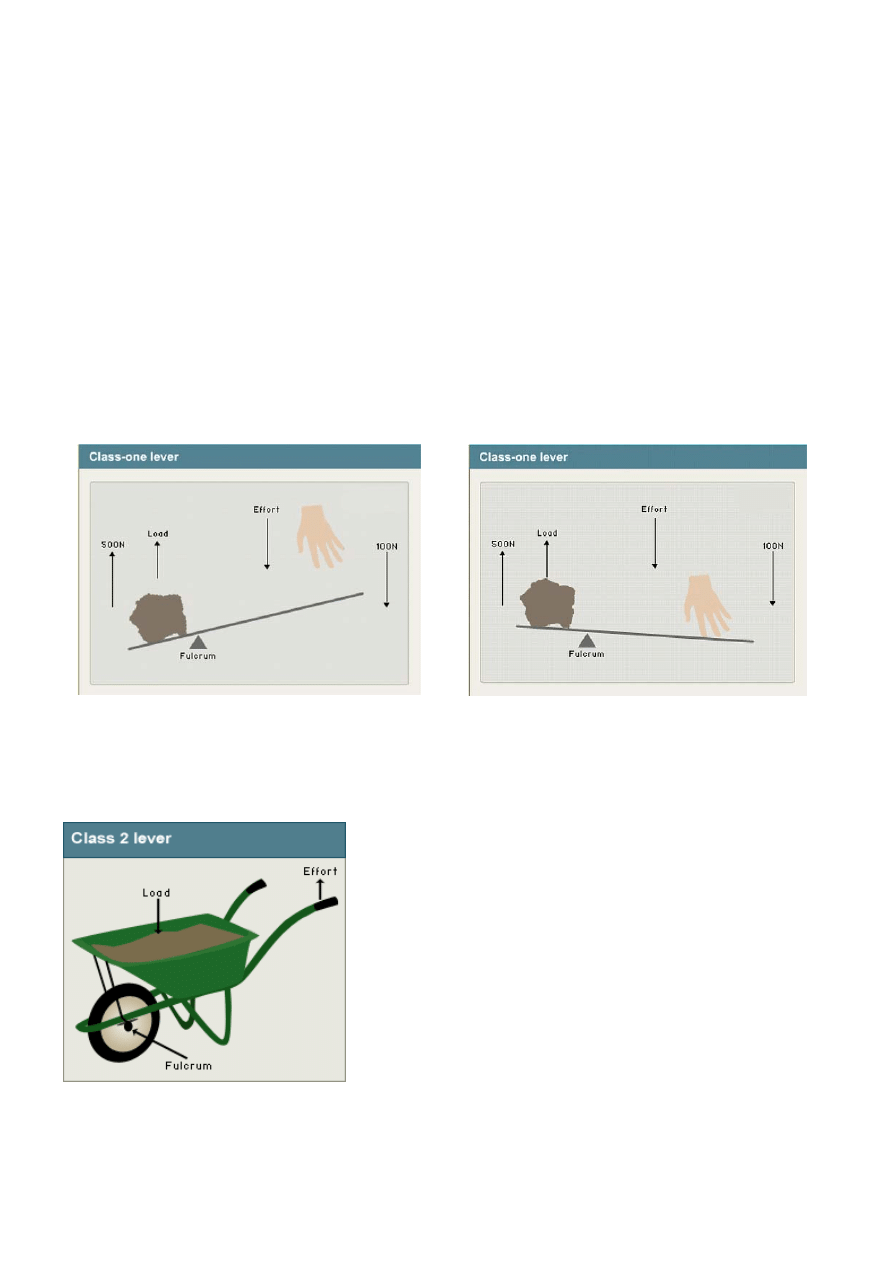
Class 1 levers
A class 1 lever has the load and the effort on opposite sides of the fulcrum, like a seesaw. Examples of a class-
one lever are a pair of pliers and a crowbar.
For example, it would take a force of 500N to lift the load in the animation below. But using a lever - a rod with the
fulcrum placed closer to the load than the point of effort - it only requires a force of 100N.
Class 2 levers
A class 2 lever has the load and the effort on the same side of the fulcrum, with the load nearer the fulcrum.
Examples of a class-two lever are a pair of nutcrackers or a wheelbarrow.
In the diagram below, the wheel or fulcrum on the wheelbarrow is helping to share the weight of the load. This
means that it takes less effort to move a load in a wheelbarrow than to carry it.
Class 2 lever
Mechanical advantage and velocity ratio
Class 1 and class 2 levers both provide mechanical advantage. This means that they allow you to move a large
output load with a small effort. Load and effort are forces and are measured in Newtons (N). Mechanical
advantage is calculated as follows:
Mechanical advantage = load ÷ effort
In the example above, where the load=500N and the effort=100N, the mechanical advantage would be:
500N ÷ 100N = 5
Velocity ratio
The mechanical advantage gained with class-one levers and class-two levers makes it seem like you are getting
something for nothing: moving a large load with a small effort. The catch is that to make the effort smaller, you
have to move a greater distance. In the first diagram the trade-off is that you need to push the lever down further
to move the load up a smaller distance. This trade-off is calculated by the velocity ratio:
Velocity ratio = distance moved by effort ÷ distance moved by load
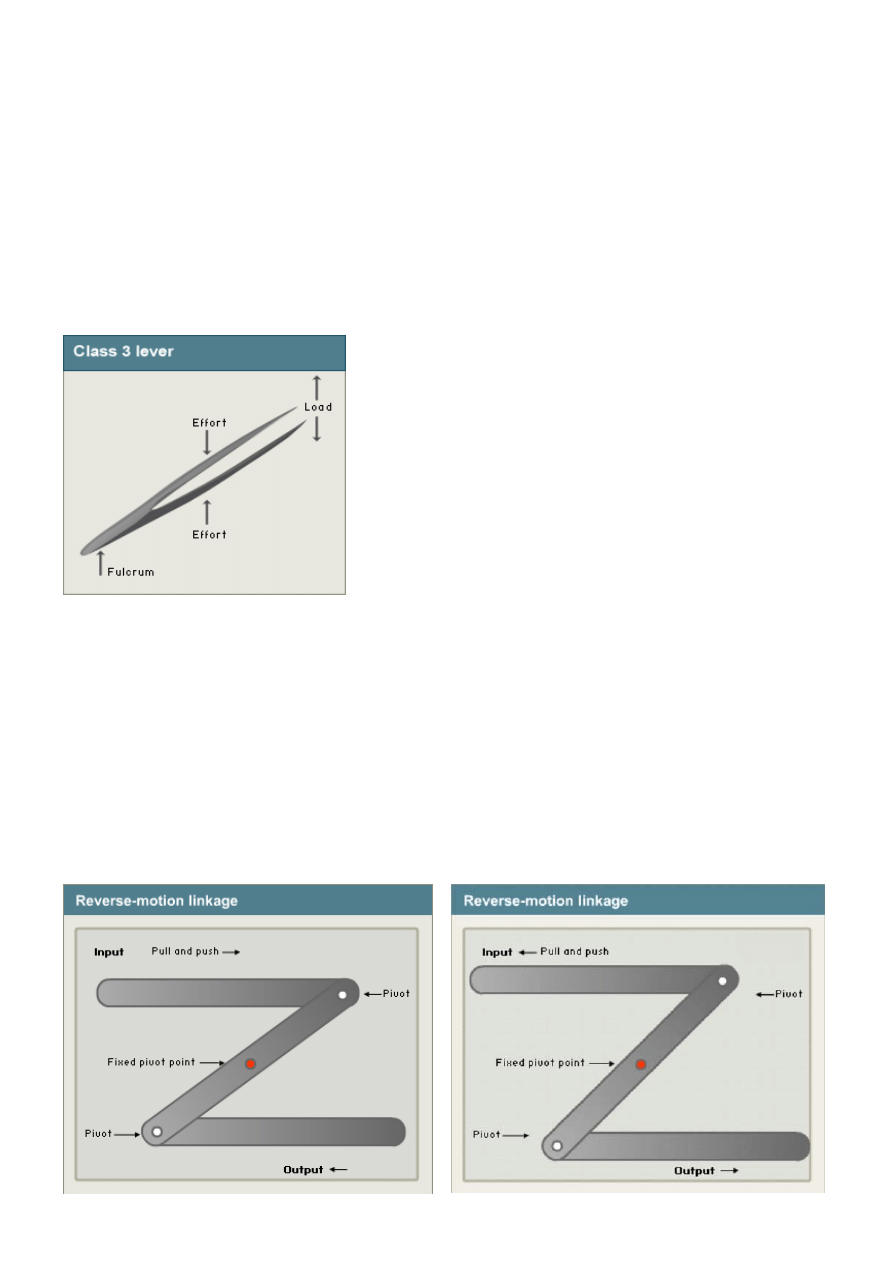
Levers: 2
A class 3 lever does not have the mechanical advantage of class-one levers and class-two levers, so examples are
less common. The effort and the load are both on the same side of the fulcrum, but the effort is closer to the
fulcrum than the load, so more force is put in the effort than is applied to the load. These levers are good for
grabbing something small, fiddly or dirty, or picking up something that could be squashed or broken if too much
pressure is applied. The common example of class 3 levers is a pair of barbeque tongs or a pair of tweezers.
The latter are shown in the diagram below.
Class 3 lever
Linkages
Linkages are mechanisms which allow force or motion to be directed where it is needed. Linkages can be used to
change:
• The direction of motion
• The type of motion
• The size of a force
A linkage consists of a system of rods or other rigid materials connected by joints or pivots. The ability of each rod
to move will be limited by moving and fixed pivots. The input at one end of the mechanical linkages will be
different from the output, in place, speed, direction and other ways.
Reverse-motion linkage
A reverse-motion linkage changes the direction of motion. In the diagram below, note how the linkage looks a little
like a "Z". See how the central rod moves around a central fixed pivot. By pulling (or pushing) the linkage in one
direction, it creates an exact opposite motion in the other direction. If the fixed pivot was not central, it would
create a larger or smaller motion in the opposite direction.
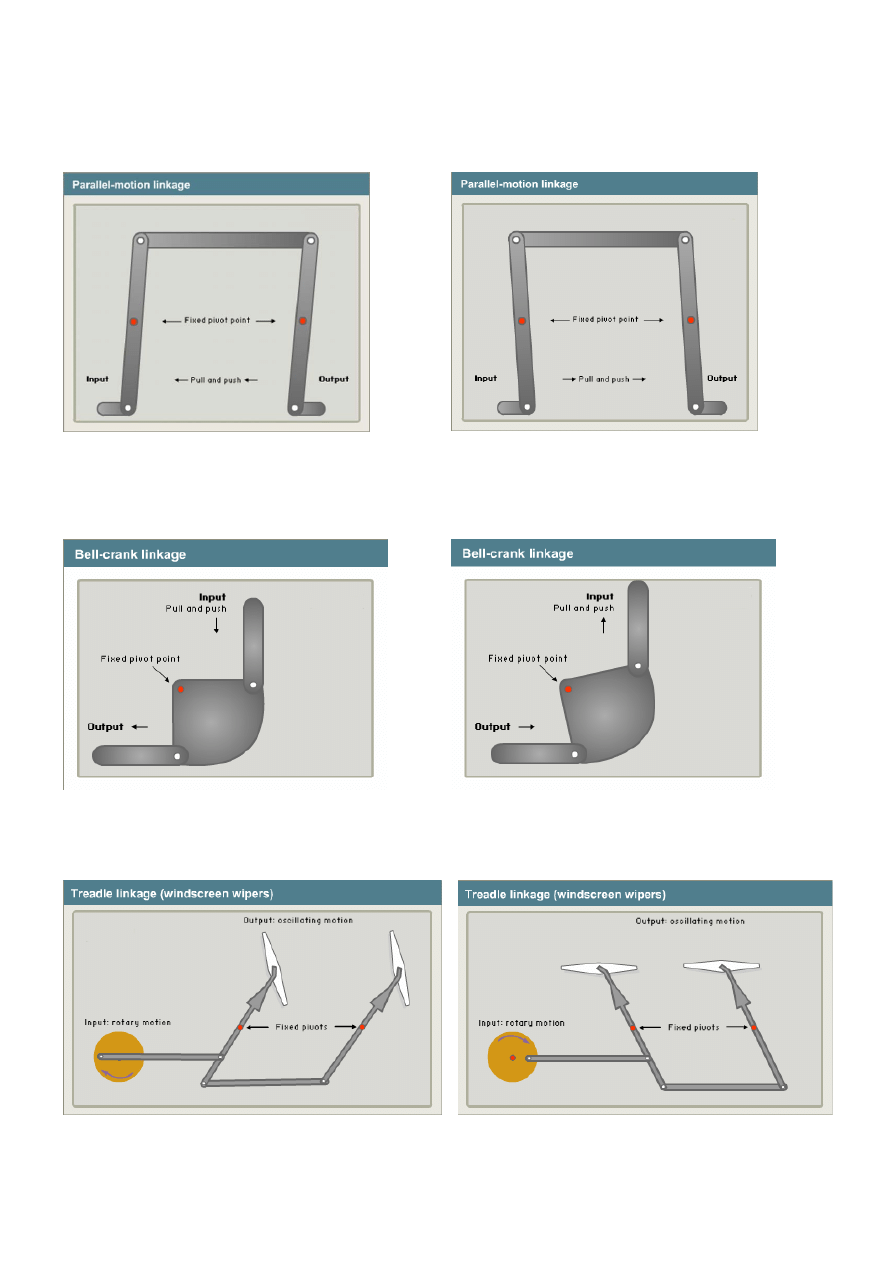
Parallel-motion linkage
A parallel-motion linkage creates an identical parallel motion. In the diagram below, note how the linkage looks a
little like an "n". This time, it is the two side rods that move around two central fixed pivots, while the top of the
"n" moves freely. By pulling (or pushing) the linkage in one direction, it creates an identical parallel motion at the
other end of the linkage.
Bell-crank linkage
A bell-crank linkage changes the direction of movement through 90°. A bell-crank linkage tends to look a little like
an "L" or, as shown in the diagram below, a mirror image of an "L". By pulling (or pushing) the linkage in one
direction, it creates a similar motion at the other end of the linkage. For example, a bell-crank linkage could be
used to turn a vertical movement into horizontal movement, as in a bicycle braking system.
Treadle linkage
A treadle linkage shows how linkages can be used to change one type of motion into another. In this case, the
rotary motion of the cam moves a parallel-motion linkage. The parallel-motion linkage controls the identical side-
to-side, or oscillating motion, of two windscreen wipers.
Cams
A cam is a shaped piece of metal or plastic fixed to a rotating shaft. A cam mechanism has three parts: cam,
slide and follower.
The cam shaft rotates continually, turning the cam. The follower is a rod that rests on the edge of the turning cam.
The follower is free to move up and down, but is prevented from moving from side to side by a slide or guide, so
the follower can only do three things:
1. Rise (move up)
2. Fall (move down) or
3. Dwell (remain stationary)
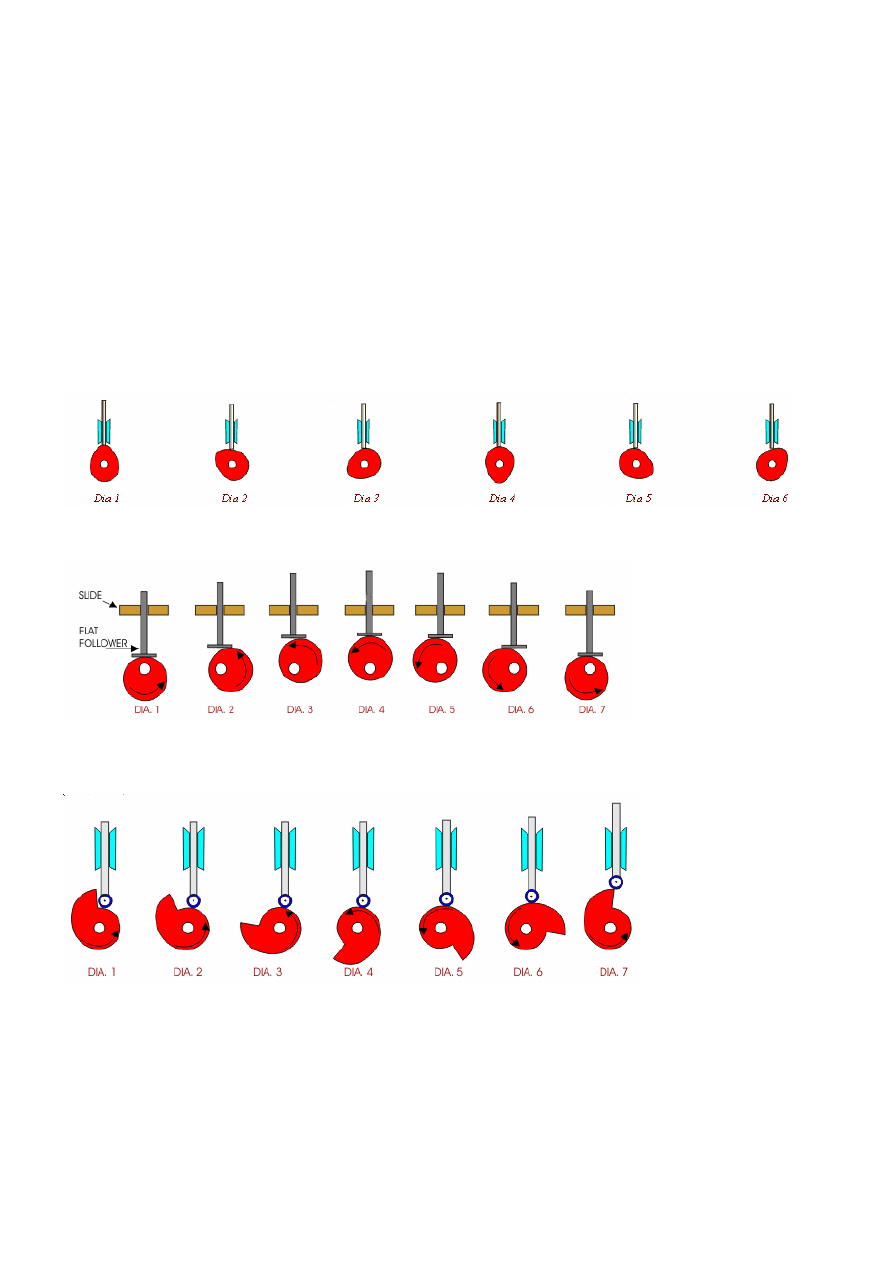
The follower's pattern of movement depends on the profile or outside edge of the cam that it follows. If the cam is
perfectly round and the fixed shaft is in the centre of the cam, the follower will dwell. But if the cam is a different
shape, and/or the shaft is not central, the follower will rise or fall. How often and how quickly the follower moves is
determined by the shape of the cam and the position of the shaft.
• Cams come in many different shapes - for example pear-shaped, triangular or square.
• The cam may have a chunk or chunks removed, so that the follower falls into a gap and is then is pushed
out again.
• Whatever the shape of the cam, positioning the shaft off-centre will alter the behaviour of the follower.
Pear-shaped cam
The pear shape of this cam means that for half the cycle, the follower will dwell. Then, as the pointed part of the
cam approaches, the follower is pushed up (rises), then, as the point passes, falls and dwells - and the cycle starts
again.
Eccentric cam
The eccentric cam is perfectly circular, but the rotating shaft is off-centre, which affects how it turns. This type of
cam produces a smooth, symmetrical rise and fall motion in the follower, which never pauses to dwell.
Drop cam
With a drop cam the shaft is central in a perfectly round cam, which has a chunk removed. The follower will dwell
for most of the cycle, until it suddenly falls into the removed section, then rises again as the cam regains its
circular shape.
Note that if the size of the cut-out portion was larger or the incline smoother, the follower would behave
differently.
Gears: 1
Gears consist of toothed wheels fixed to shafts. The teeth interlock with each other, and as the first shaft (the
driver shaft) rotates, the motion is transmitted to the second or driven shaft. The motion output at the driven
shaft will be different from the motion input at the driver shaft - in place, speed, direction and other ways.
A number of gears connected together are called a gear train. The input (e.g. a motor) is connected to the driver
gear. The output, (e.g. the wheel of a buggy) is connected to the driven gear.
Spur gears
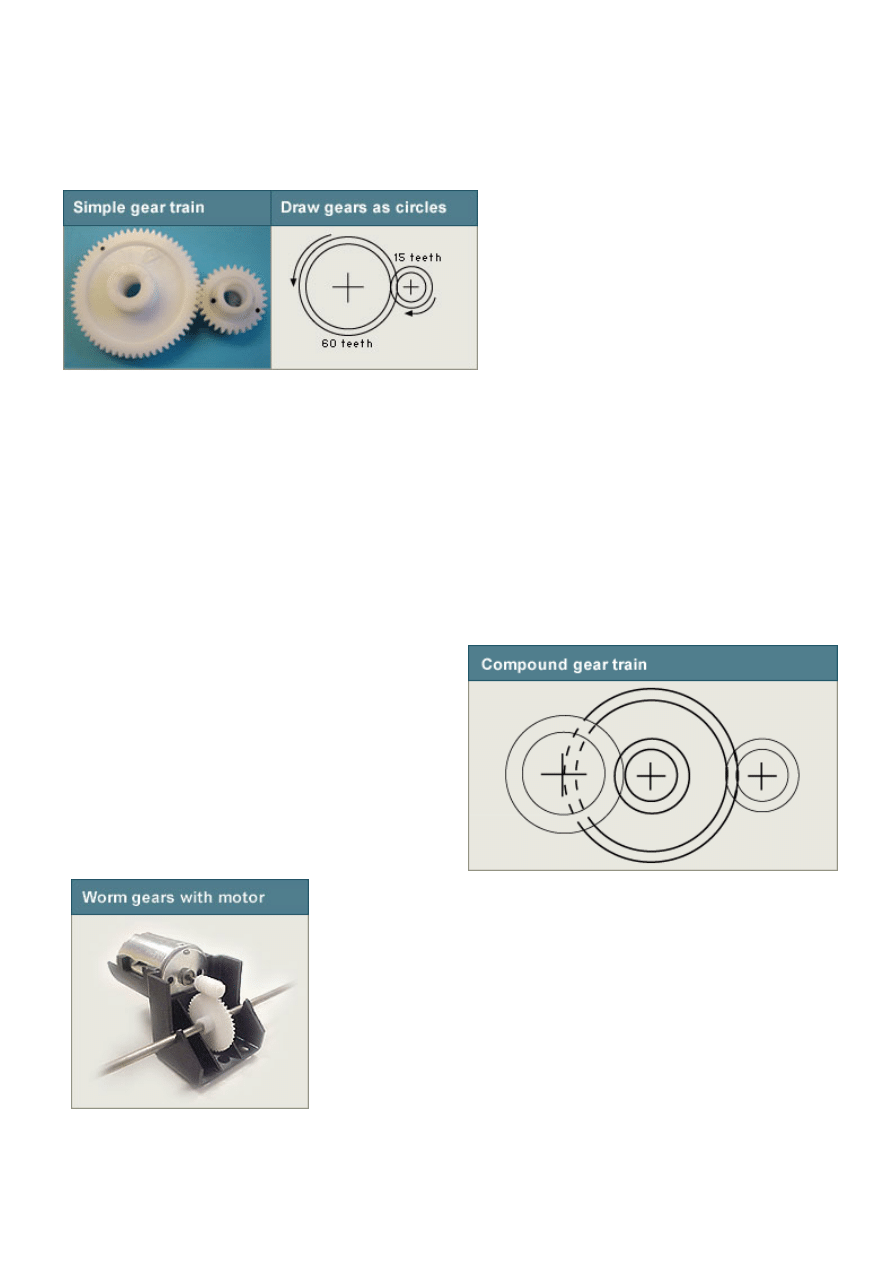
The photograph below shows a simple gear train made up of a couple of spur gears. These are the common gears
(or cogs) that look like wheels with teeth around the rim. Next to the photo is a diagram showing how you would
draw this gear train in an exam.
In the drawing, the centre of each gear is shown by a cross. Each gear is drawn as two circles, one slightly larger
than the other to show where the teeth would be. Teeth do not have to be drawn, but the number of teeth is
written next to the gear, in this case 60 teeth and 15 teeth. Arrows indicate the direction that the gears are
moving. Note that with two connected gears, they will be rotating in opposite directions.
Gears
Gear ratio and output speed
Where there are two gears of different sizes, the smaller gear will rotate faster than the larger gear. The difference
between these two speeds is called the velocity ratio, or the gear ratio, and can be calculated using the number
of teeth. The formula is:
Gear ratio = number or teeth on driven gear ÷ number of teeth on the driver gear
So the gear ratio for the simple gear train above, if the smaller gear is the driver gear, is:
Gear ratio = 60 ÷ 15 = 4.
In other words, the driver gear revolves four times to make the driven gear revolve once.
If you know the gear ratio, and the speed input at the driver gear, you can calculate the speed output at the
driven gear using the formula:
Output speed = input speed ÷ gear ratio
So if the gear ratio is 4 and the driver gear is revolving at 200 rpm [rpm:
= revolutions per minute, a measure of
speed of rotation ] then the output speed = 200 ÷ 4 = 50 rpm
Gears: 2
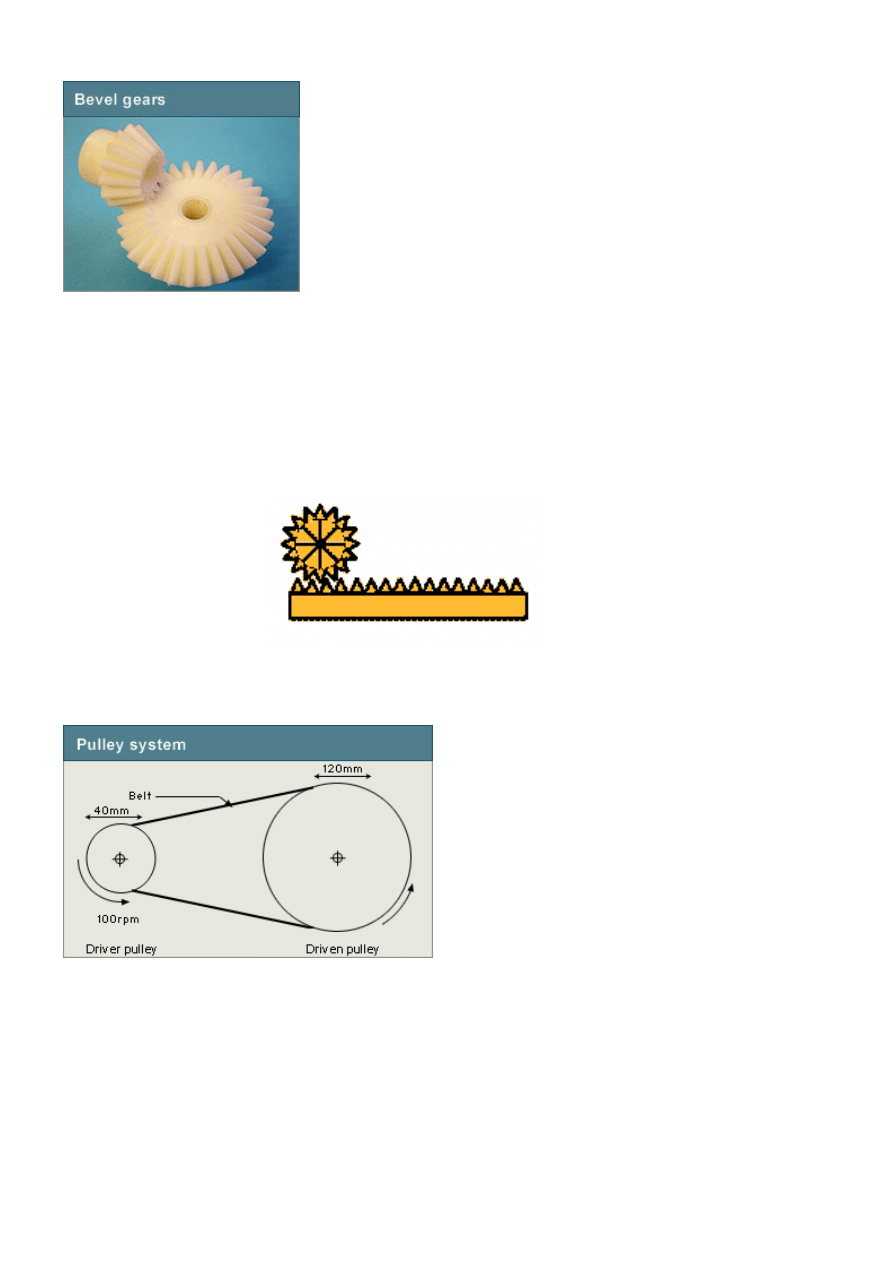
Compound gear train
Where very large speed reductions are required, several
pairs of gears can be used in a compound gear train. A
small gear drives a large gear. The large gear has a
smaller gear on the same shaft. This smaller gear drives a
large gear. With each transfer, the speed is significantly
reduced.
Compound gear train
Worm gears
Worm gears
Another method of making large speed reductions is to use a worm
gear. This is a shaft with a thread like a screw. This connects at 90° to a
large gear (the thread shaft points along the outside edge of the larger
gear). Each time the shaft spins one revolution, the gear turns forward
by only one tooth. If the gear has 50 teeth, this creates a gear ratio of
50:1. The worm can drive the worm gear round, but the worm gear
cannot drive the worm. This means that worm gears are good to use in
hoists, the load will not fall back when the motor stops. Worm gears are
a good option when you wish to alter direction or rotary motion through
90° and reduce the speed. The photograph to the left shows a worm
gear powered by a motor.
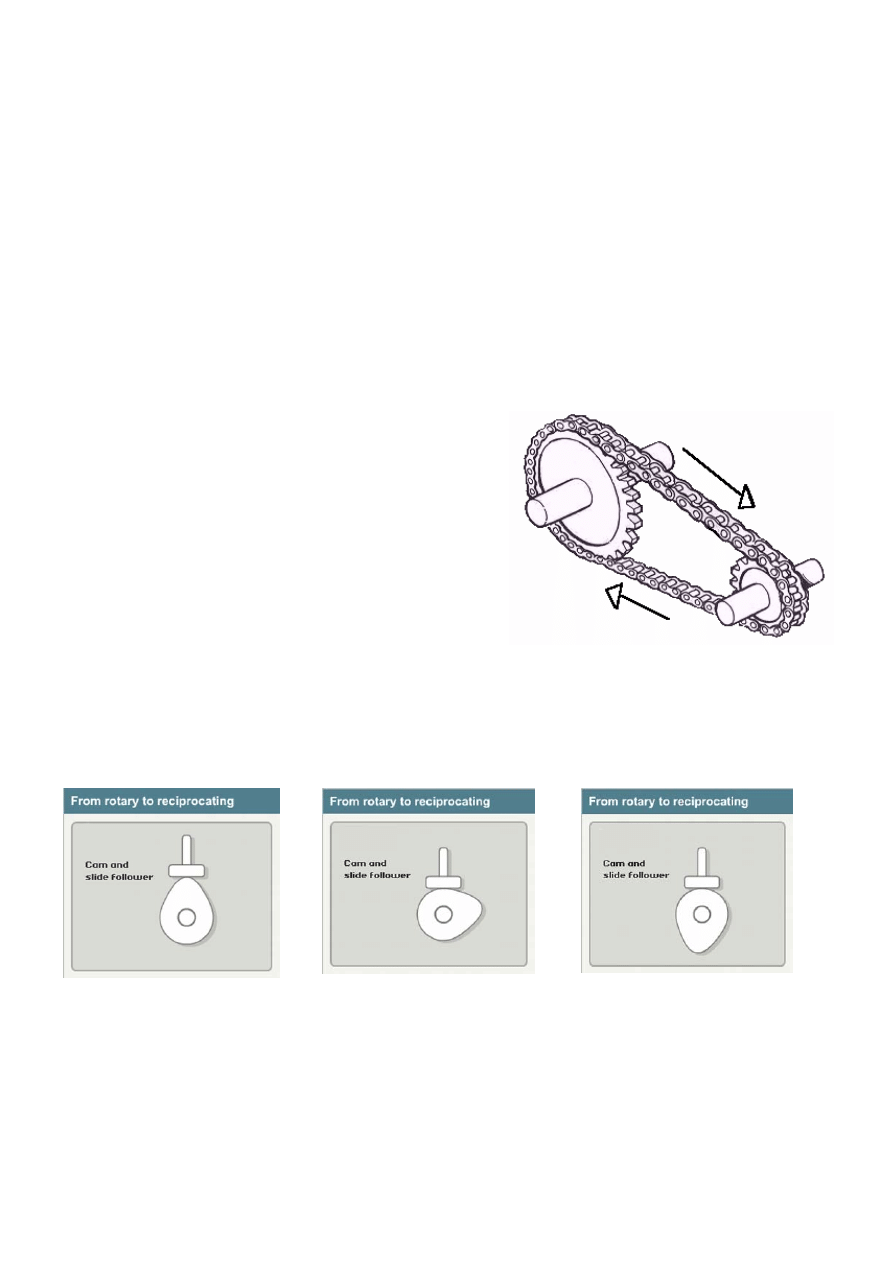
Bevel gears
Bevel gears
Bevel gears, like worm gears, change the axis of rotation through 90°.
The teeth have been specially cut so the gears will mesh at right-angles
to each other, where spur gears must be parallel.
Rack and pinion
A pinion is a round cog and the rack is a flat bar with teeth. The driver cog either moves along the rack, as in a
rack and pinion (funicular) railway - or else the driver cog moves the rack, as in the steering system in cars.
Rack and pinion changes rotary motion into linear motion - as shown in the diagram below.
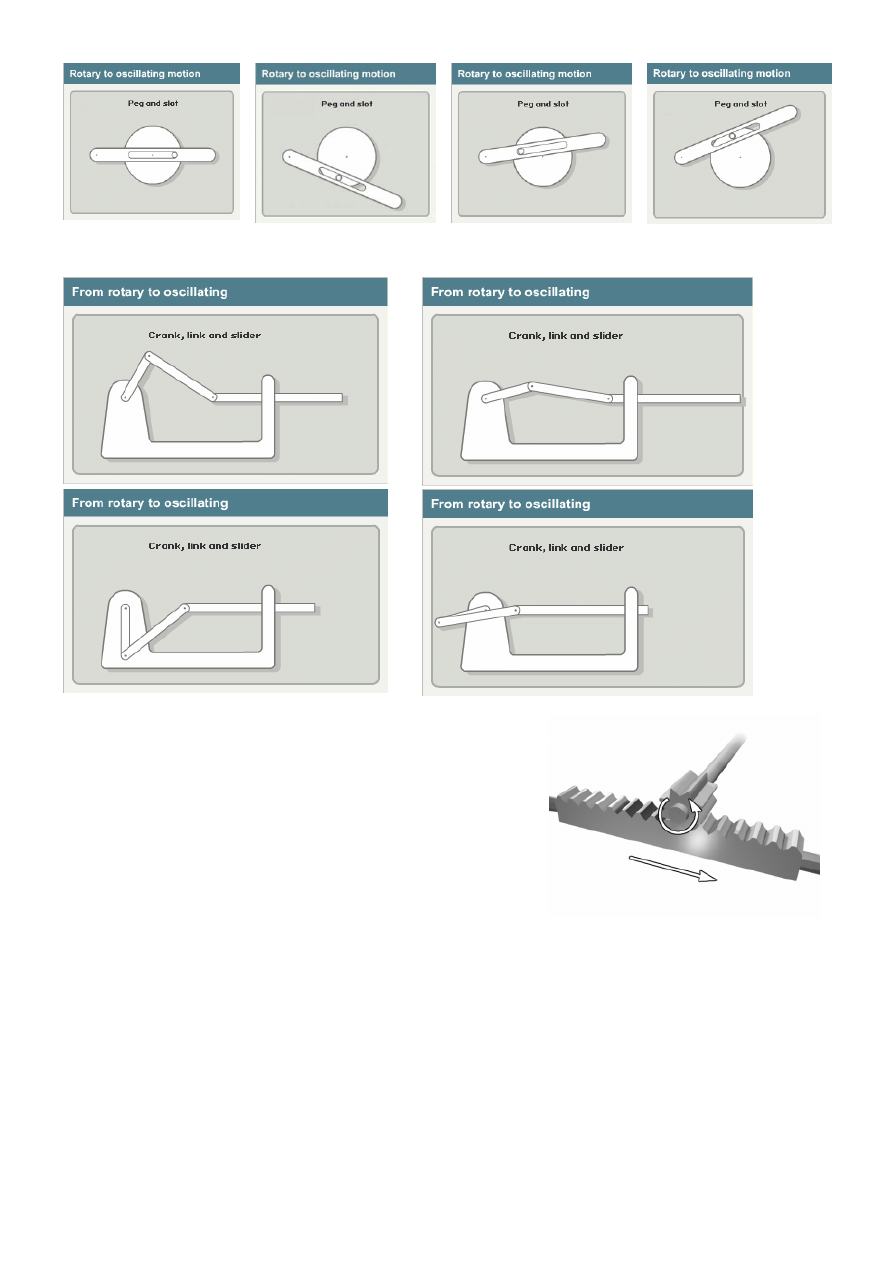
Pulley systems
Pulleys are used to change the speed, direction of rotation, or turning force or torque.
A pulley system consists of two pulley wheels each on a shaft, connected by a belt. This transmits rotary
motion and force from the input, or driver shaft, to the output, or driven shaft.
Image shows a pulley system consisting of two pulley wheels and a belt. The smaller, driver, pulley is 40mm wide
and the larger, driven pulley is 120mm wide. The speed of the smaller wheel is 100rpm.
If the pulley wheels are different sizes, the smaller one will spin faster than the larger one. The difference in speed
is called the velocity ratio. This is calculated using the formula:
Velocity ratio = diameter of the driven pulley ÷ diameter of the driver pulley
If you know the velocity ratio and the input speed of a pulley system, you can calculate the output speed using the
formula:
Output speed = input speed ÷ velocity ratio
Worked example
• Work out the velocity ratio and the output speed of the pulley shown in the diagram above.
• Velocity ratio = 120mm ÷ 40mm = 3
• Output speed = 100rpm ÷ 3 = 33.3 rpm
Torque
The velocity ratio of a pulley system also determines the amount of turning force or torque transmitted from the
driver pulley to the driven pulley. The formula is:
output torque = input torque × velocity ratio.
Pulley drive belts
Drive belts are usually made of synthetic fibres such as neoprene and polyurethane, with a V-shaped cross section.
It is possible to reverse the direction of the driven pulley by twisting the belt as it crosses from input to output.
Pulley belts have the advantage over chains that they do not need lubrication (though unlike a chain, a belt can
slip).
Types of motion
There are four basic types of motion in mechanical systems:
• Rotary motion is turning round in a circle, such as a wheel turning.
• Linear motion is moving in a straight line, such as on a paper trimmer.
• Reciprocating motion is moving backwards and forwards in a straight line, as in cutting with a saw.
• Oscillating motion is swinging from side to side, like a pendulum in a clock.
Many mechanisms take one type of input motion, and output it as a different type of motion. Below are some
examples.
Chain and sprocket
A chain and sprocket changes rotary motion to linear motion
- or vice versa. A wheel-and-axle, rack-and-pinion, rope-and-
pulley, screw thread, or chain-and-sprocket could also be used
for this.
Cam-and-follower
A cam-and-follower changes rotary motion to reciprocating motion. A crank, link and slider or rack-and-pinion
could also be used for this.
Peg-and-slot
A peg-and-slot changes oscillating motion to rotary motion. A crank, link and slider could be used for this, and
also to change rotary to oscillating motion.
Crank, link and slider
4. A crank, link and slider will change rotary motion to oscillating / reciprocating motion.
1.
2.
3.
4.
Rack-and-pinion
A rack-and-pinion changes rotary motion to reciprocating
motion. A crank, link and slider could also be used for this. A cam-
and-follower will change reciprocating to rotary motion.
Mechanical systems and sub-systems
Small systems can be combined to make more complex systems. A
cam which is turned by an electric motor can operate a micro switch
which could be used to turn a light on or off. Two mechanical systems
can be connected together to give complex movements.
Wyszukiwarka
Podobne podstrony:
mechanika 3 id 290735 Nieznany
manual mechanika 2 2 id 279133 Nieznany
mechanikakinematyka id 291582 Nieznany
Przekladnie mechaniczne id 4047 Nieznany
Egzamin mechanika3 id 152505 Nieznany
Mechanizmy id 291695 Nieznany
przekladnie mechaniczne id 4048 Nieznany
Dodatek B Mechanika id 138691 Nieznany
mechanika 3 id 290735 Nieznany
manual mechanika 2 2 id 279133 Nieznany
mechanika plynow id 291486 Nieznany
Mechanika budowli 4 id 290783 Nieznany
mechanika do poprawki id 290847 Nieznany
mechanika plynow id 291242 Nieznany
mechanizmy lewopolkulowe id 291 Nieznany
MECHANIKA PLYNOW 1 id 291255 Nieznany
MECHANIKA PLYNOW 2(1) id 291256 Nieznany
mechanika inzynieria id 291479 Nieznany
więcej podobnych podstron