
PODSTAWOWE ELEMENTY LINIOWE UKŁADÓW
AUTOMATYKI
Elementy liniowe klasyfikuje si najcz ciej ze wzgl du na ich własno ci
dynamiczne. Wyró niamy nast puj ce grupy elementów podstawowych:
1.
Elementy bezinercyjne (proporcjonalne);
2.
Elementy inercyjne pierwszego rz du (jednoinercyjne);
3.
Elementy inercyjne wy szych rz dów (wieloinercyjne);
4.
Elementy całkowe;
5.
Elementy ró niczkuj ce;
6.
Elementy oscylacyjne;
7.
Elementy opó niaj ce.
Własno ci statyczne wszystkich elementów okre la mo na przez podanie
równania i wykresu charakterystyki statycznej
y=f(x), a własno ci dynamiczne przez
podanie równania ró niczkowego i odpowiadaj cej mu transmitancji operatorowej
oraz wykresu odpowiedzi
y(t) na wymuszenie skokowe.
Element bezinercyjny
Element bezinercyjny charakteryzuje si tym, e w ka dej chwili jego sygnał
wyj ciowy
Y(s) jest proporcjonalny do sygnału wej ciowego X(s).
Ogólna posta równania elementu bezinercyjnego jest nast puj ca:
kX
Y
=
gdzie:
Y – wielko wyj ciowa, X – wielko wej ciowa,
k – współczynnik proporcjonalno ci (wzmocnienia).
)
t
(
x
k
)
t
(
y
⋅
=
;
)
s
(
X
k
)
s
(
Y
⋅
=
Transmitancja elementu bezinercyjnego jest równa współczynnikowi
proporcjonalno ci:
X(s)
Y(s)
G(s)
Elementy liniowe układów automatyki
Element bezinercyjny
k
)
s
(
X
)
s
(
Y
)
s
(
G
=
=
;
s
)
s
(
G
)
s
(
h
=
;
s
k
)
s
(
h
=
α
=
−
S
)
s
(
G
)
t
(
h
1
;
)
t
(
1
k
)
t
(
h
⋅
=
Odpowied jednostkowa:
s
k
)
s
(
h
=
;
)
t
(
1
k
)
t
(
h
⋅
=
;
)
s
(
G
)
s
(
g
=
;
k
)
s
(
g
=
;
)]
s
(
G
[
)
t
(
g
1
−
α
=
;
)
t
(
k
)
t
(
g
δ
⋅
=
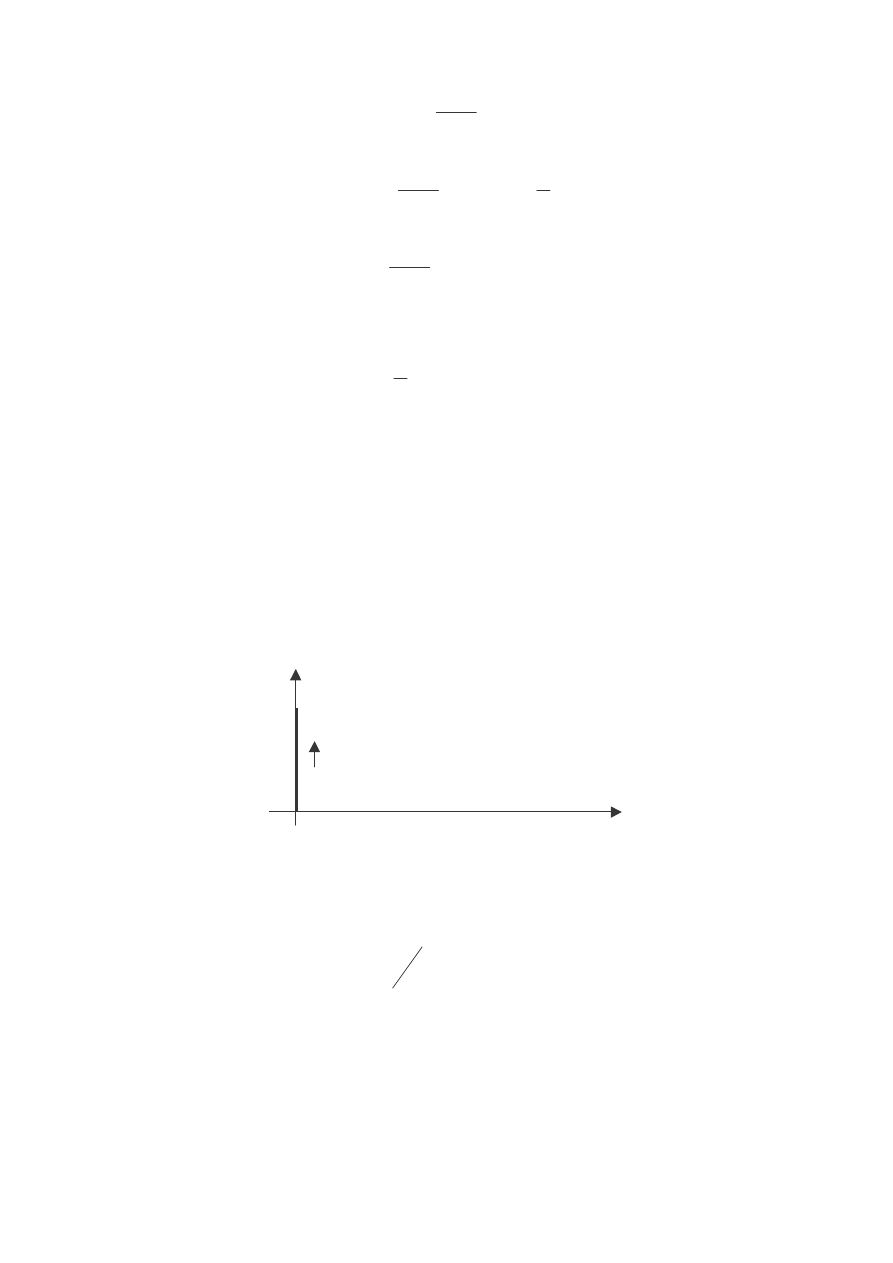
Odpowied impulsowa:
k
)
s
(
g
=
;
)
t
(
k
)
t
(
g
δ
⋅
=
t
g(t)
k
δ(t)
Odpowied impulsowa elementu proporcjonalnego
Transmitancja widmowa:
ω
=
=
ω
j
s
)
s
(
G
)
j
(
G
k
)
j
(
G
=
ω
)
(
jQ
)
(
P
)
j
(
G
ω
+
ω
=
ω
k
)
(
P
=
ω
O
)
(
Q
=
ω
Elementy liniowe układów automatyki
Element bezinercyjny
Charakterystyki członu proporcjonalnego
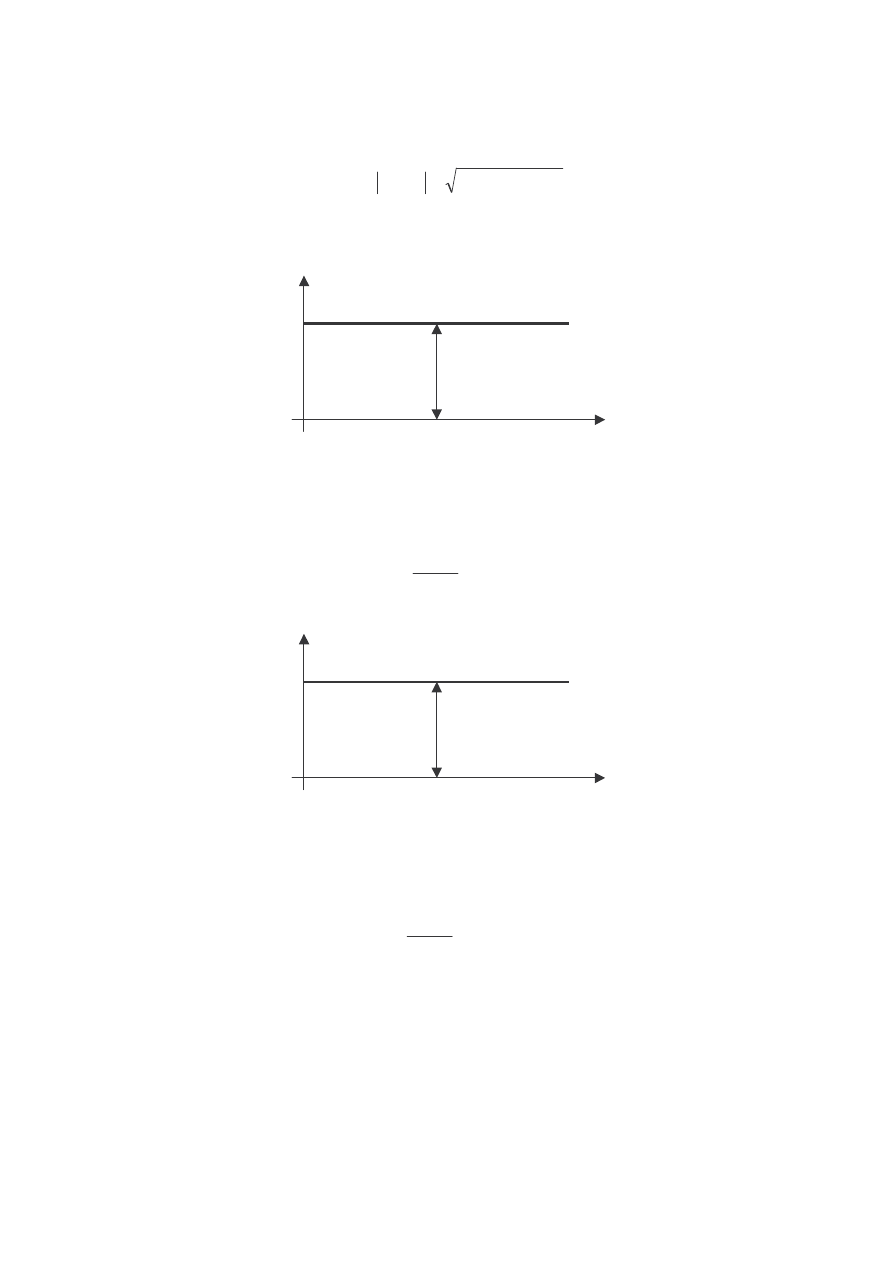
Charakterystyka amplitudowa:
( )
)
(
Q
)
(
P
)
j
(
G
A
2
2
ω
+
ω
=
ω
=
ω
;
( )
k
A
=
ω
k
ω
A(
ω)
Charakterystyka amplitudowa
Charakterystyka fazowa:
)
(
P
)
(
Q
ctg
ar
)
(
ω
ω
=
ω
ϕ
;
0
)
(
=
ω
ϕ
k
ω
A(
ω)
Charakterystyka amplitudowa
Charakterystyka fazowa:
)
(
P
)
(
Q
ctg
ar
)
(
ω
ω
=
ω
ϕ
;
0
)
(
=
ω
ϕ
Elementy liniowe układów automatyki
Element bezinercyjny
ω
ϕ(ω)
ϕ(ω)=0
X(t)
Y(t)
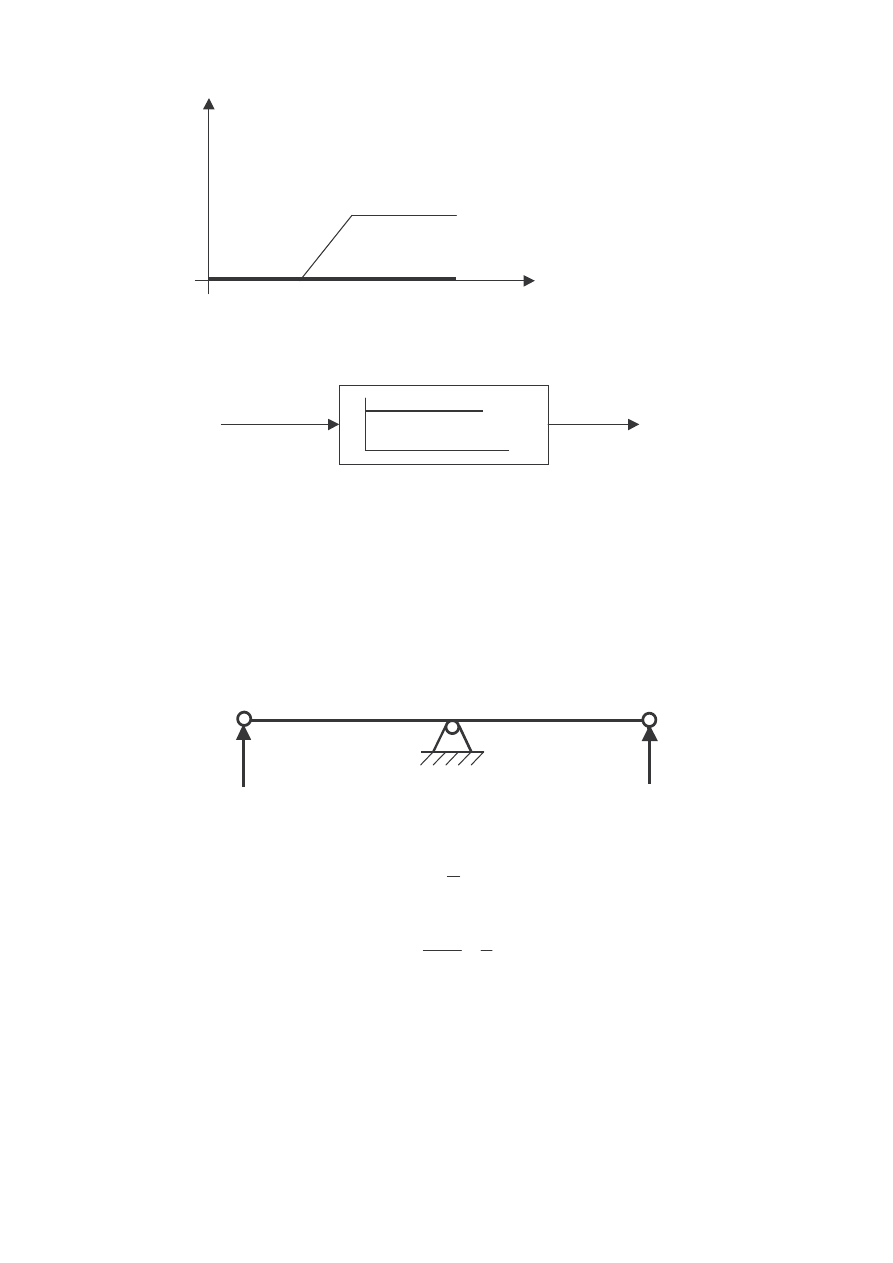
Charakterystyka fazowa i oznaczenie elementu proporcjonalnego stosowane
na schematach blokowych
Przykłady elementów proporcjonalnych
D wignia dwustronna
D wignia dwustronna
x
y
F
b
a
F
=
;
k
b
a
)
s
(
F
)
s
(
F
)
s
(
G
x
y
=
=
=
F
x
F
y
a
b
x
y
Elementy liniowe układów automatyki
Element bezinercyjny
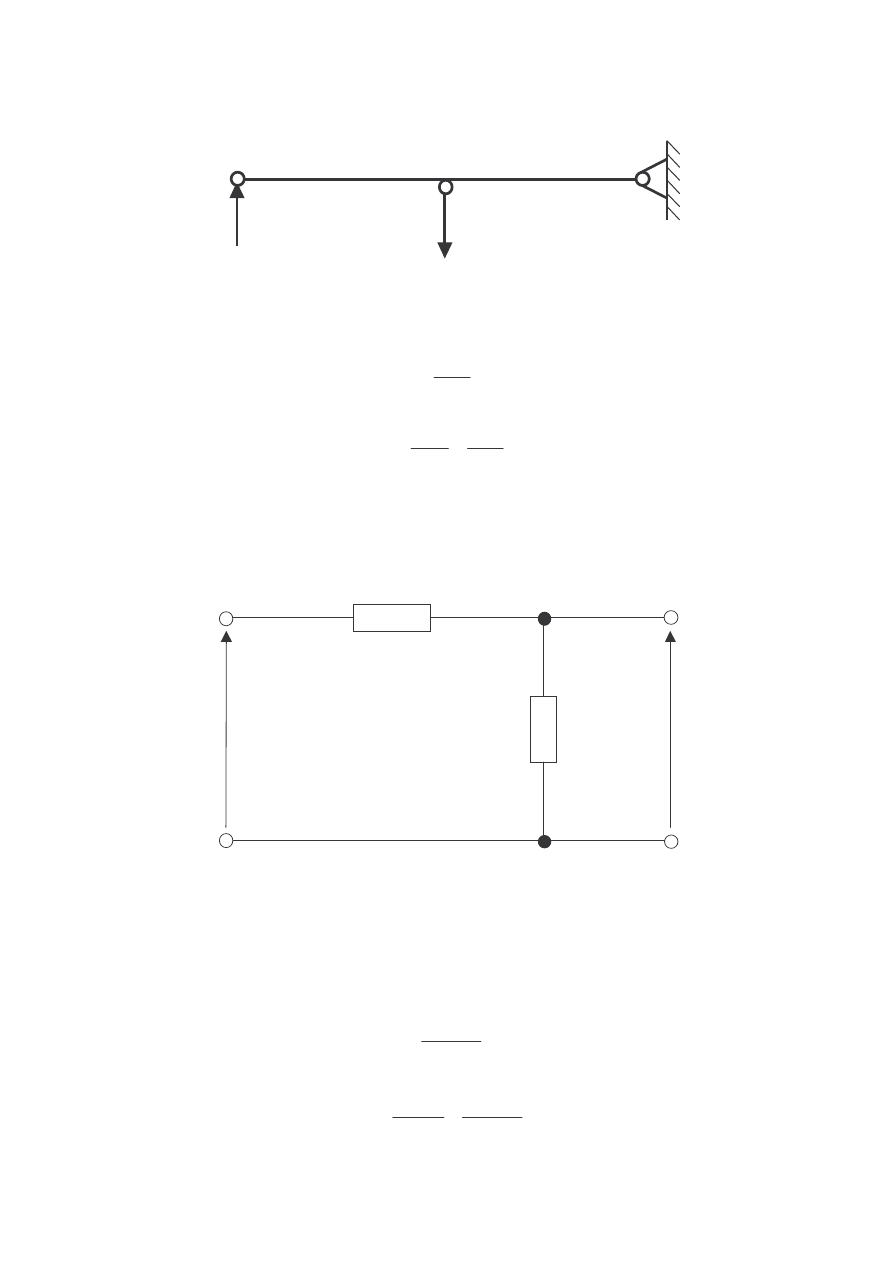
D wignia jednostronna
F
x
F
y
a
b
y
x
D wignia jednostronna
x
y
F
b
b
a
F
+
=
;
k
b
b
a
)
s
(
F
)
s
(
F
)
s
(
G
x
y
=
+
=
=
D wignia jest elementem proporcjonalnym o współczynniku wzmocnienia k.
Czwórnik rezystancyjny.
e
t)
y
t)
Czwórnik rezystancyjny
W pokazanym na schemacie nie obci alnym czwórniku rezystancyjnym
mi dzy napi ciem wyj ciowym U
2
, a napi ciem wej ciowym U
1
wyst puje zwi zek:
)
t
(
U
R
R
R
)
t
(
U
we
2
1
2
wy
+
=
;
k
R
R
R
)
s
(
U
)
s
(
U
)
s
(
G
2
1
2
we
wy
=
+
=
=
Elementy liniowe układów automatyki
Element bezinercyjny
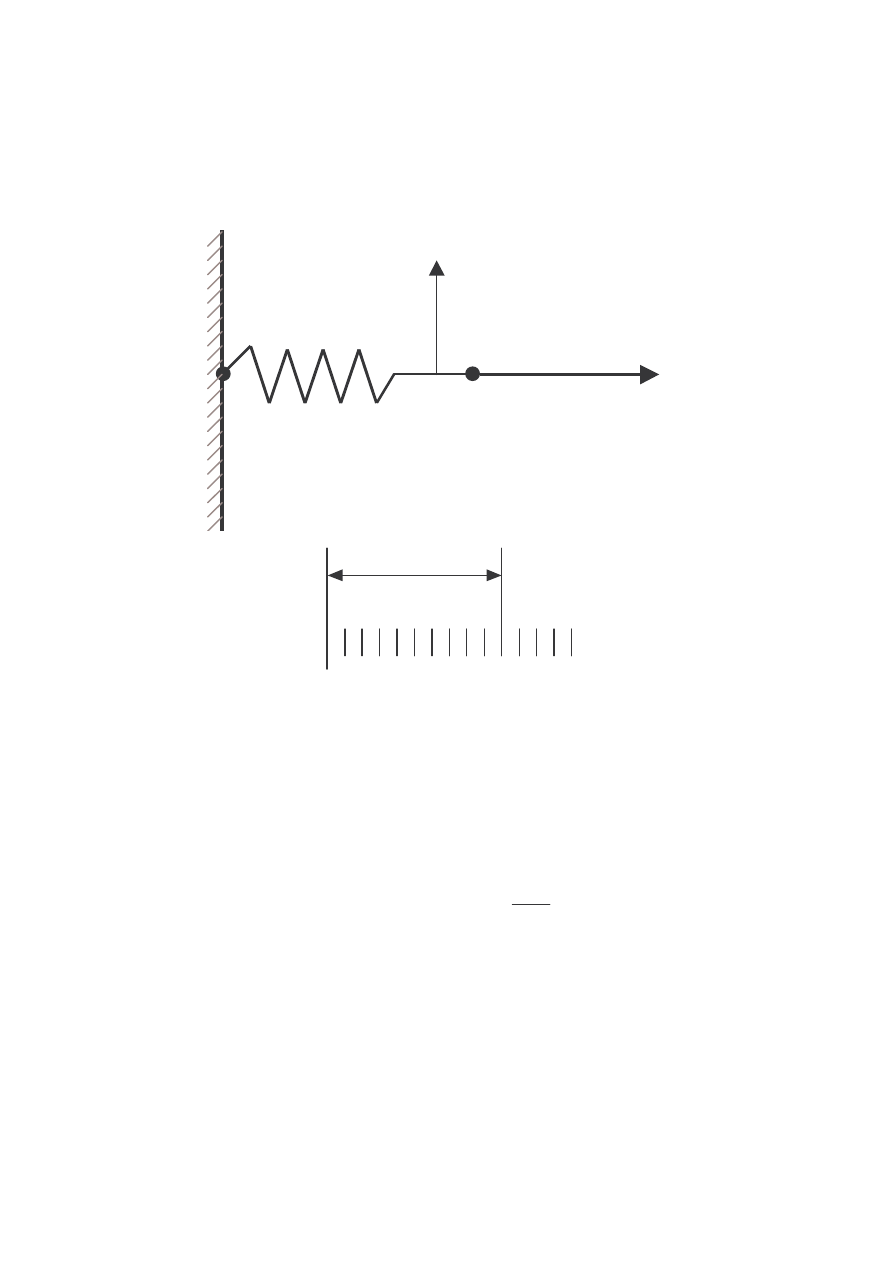
Dynamometr spr ynowy
0
∆ l
Schemat dynamometru spr ynowego:
F –siła,
∆
l – zmiana długo ci spr yny, k
spr
– stała spr yny
Je eli spr yna jest idealna to mas mo na pomin i wtedy zmiana jej długo ci
jest proporcjonalna do siły.
l
k
F
spr
∆
⋅
=
spr
k
)
s
(
l
)
s
(
F
)
s
(
G
=
∆
=
Omawiany dynamometr jest członem proporcjonalnym, którego współczynnik
wzmocnienia jest równy stałej spr yny k
spr
.
k
spr
F
Wyszukiwarka
Podobne podstrony:
05 Serwozawory i zawory proporcjonalne Konspekt
podrecznik 2 18 03 05
regul praw stan wyjątk 05
05 Badanie diagnostyczneid 5649 ppt
Podstawy zarządzania wykład rozdział 05
05 Odwzorowanie podstawowych obiektów rysunkowych
05 Instrukcje warunkoweid 5533 ppt
05 K5Z7
05 GEOLOGIA jezior iatr morza
05 IG 4id 5703 ppt
05 xml domid 5979 ppt
Świecie 14 05 2005
Wykł 05 Ruch drgający
TD 05
więcej podobnych podstron