Konspekt: Serwozawory
1
Wzmacniacz elektrohydrauliczny (serwozawór)
1. Wprowadzenie
Wzmacniacze elektrohydrauliczne (serwozawory) przeznaczone są do regulacji położenia
(przemieszczenia), prędkości lub siły w układach hydraulicznych poprzez sterowanie wielkością i
kierunkiem przepływu czynnika roboczego proporcjonalnie do wielkości i znaku elektrycznego sygnału
sterującego.
Wzmacniacze te stanowią elementy łączące elektroniczne urządzenie sterujące z hydraulicznymi
urządzeniami wykonawczymi. Wzmocnienie serwozaworu jest to stosunek mocy wyjściowej (oleju) do
mocy sygnału sterującego. Serwozawory osiągają wzmocnienia rzędu do kilkaset tysięcy razy.
Wzmacniacze elektrohydrauliczne znalazły bardzo szerokie zastosowanie w wielu dziedzinach
techniki jak:
- wzbudniki drgań do badań wytrzymałościowych materiałów, zespołów konstrukcyjnych i
kompletnych maszyn, do badań konstrukcji budynków (symulacja drgań sejsmicznych ziemi),
- lotnictwo (samoloty, promy kosmiczne)
- maszyny robocze, statki, obrabiarki
- oraz w wielu innych układach automatyki przemysłowej o wysokich wymaganiach technicznych.
Układy regulacji ze wzmacniaczami elektrohydraulicznymi łączą w sobie zalety układów
elektronicznych (łatwość kształtowania sygnału, zdolność realizowania funkcji logicznych i przeliczeń)
oraz układów hydraulicznych (duża moc na wyjściu, niezawodność działania).
2. Typowe obwody regulacyjne ze wzmacniaczami elektrohydraulicznymi
Wzmacniacze elektrohydrauliczne (serwozawory) stosowane są najczęściej w układach regulacji
położenia, siły lub prędkości. Schemat typowego układu regulacji przemieszczenia tłoka siłownika
przedstawia rysunek 1.
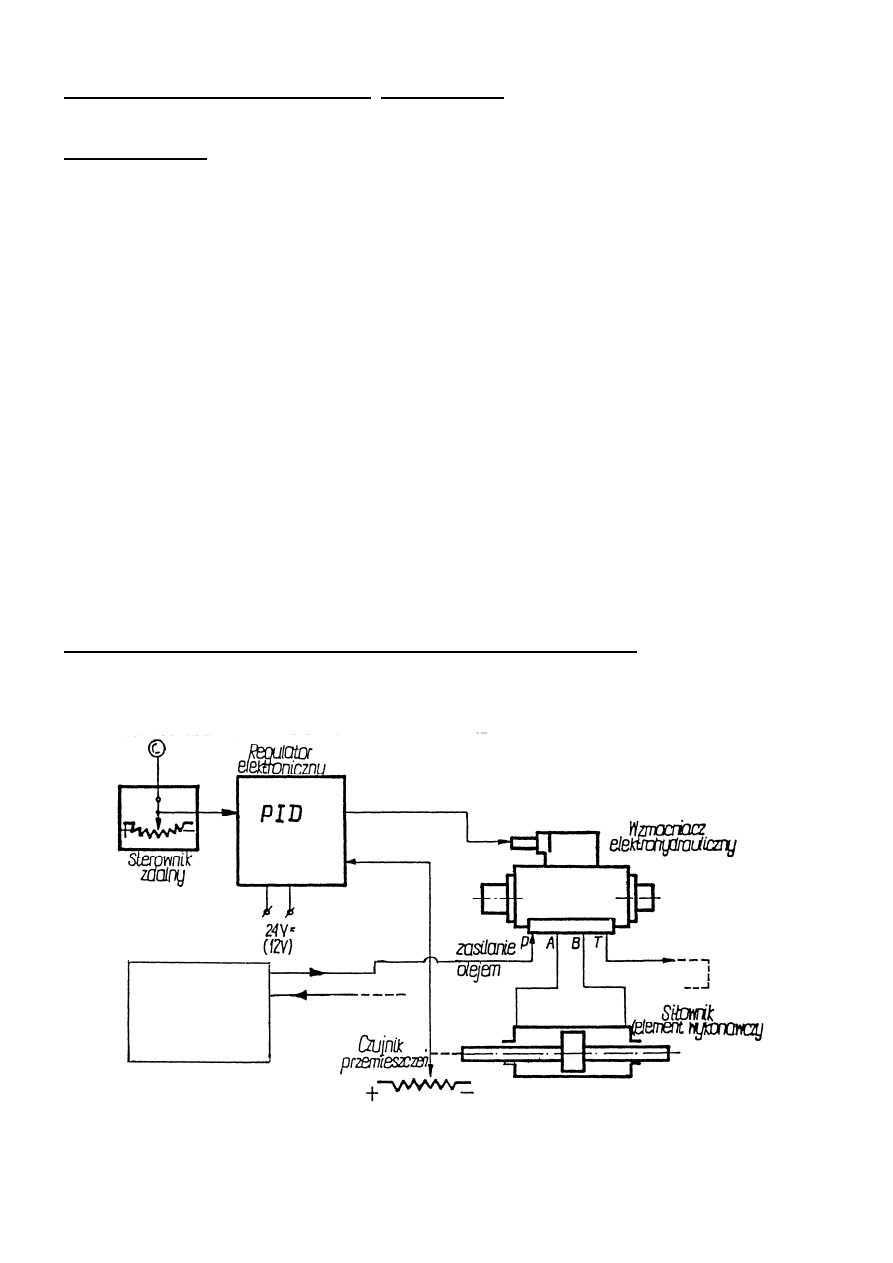
Rys.1 Układ regulacji położenia tłoka siłownika: 1-sterownik zdalny, 2-regulator PID, 3-
serwozawór(wzmacnacz elektrohydrauliczny), 4-siłownik wykonawczy, 5-czujnik przemieszczenia, 6-
zasilacz hydrauliczny
Zasilacz
hydrauliczny
Konspekt: Serwozawory
2
Wzmacniacz elektrohydrauliczny w tym układzie zasila siłownik będący elementem wykonawczym.
Przemieszczenie tłoczyska siłownika mierzone jest czujnikiem przemieszczeń (czujnik indukcyjny).
Sygnał z czujnika, jako sygnał sprzężenia zwrotnego, podawany jest do regulatora elektronicznego,
gdzie po porównaniu z sygnałem zadanym, jako sygnał uchybu przetwarzany jest dalej w regulatorze PID.
Wzmocniony napięciowy sygnał uchybu jest przekształcany na sygnał prądowy doprowadzony do cewek
silnika momentowego wzmacniacza elektrohydraulicznego.
Współczynniki regulatora PID można regulować w szerokim zakresie celem uzyskania
wymaganych własności dynamicznych obwodu. Sygnał zadany wytwarzany jest w sterowniku zdalnym
(stosowanym np. w maszynach samojezdnych) lub w urządzeniu sterującym (np. komputerze).
Układ regulacji siły jest podobny do przedstawionego z tym, że sygnał sprzężenia zwrotnego
wytwarzany jest przez czujnik siły.
W układzie regulacji prędkości sygnał sprzężenia otrzymywany jest z kolei z czujnika prędkości,
którym może być np. prądnica tachometryczna w przypadku, gdy elementem wykonawczym jest silnik
hydrauliczny.
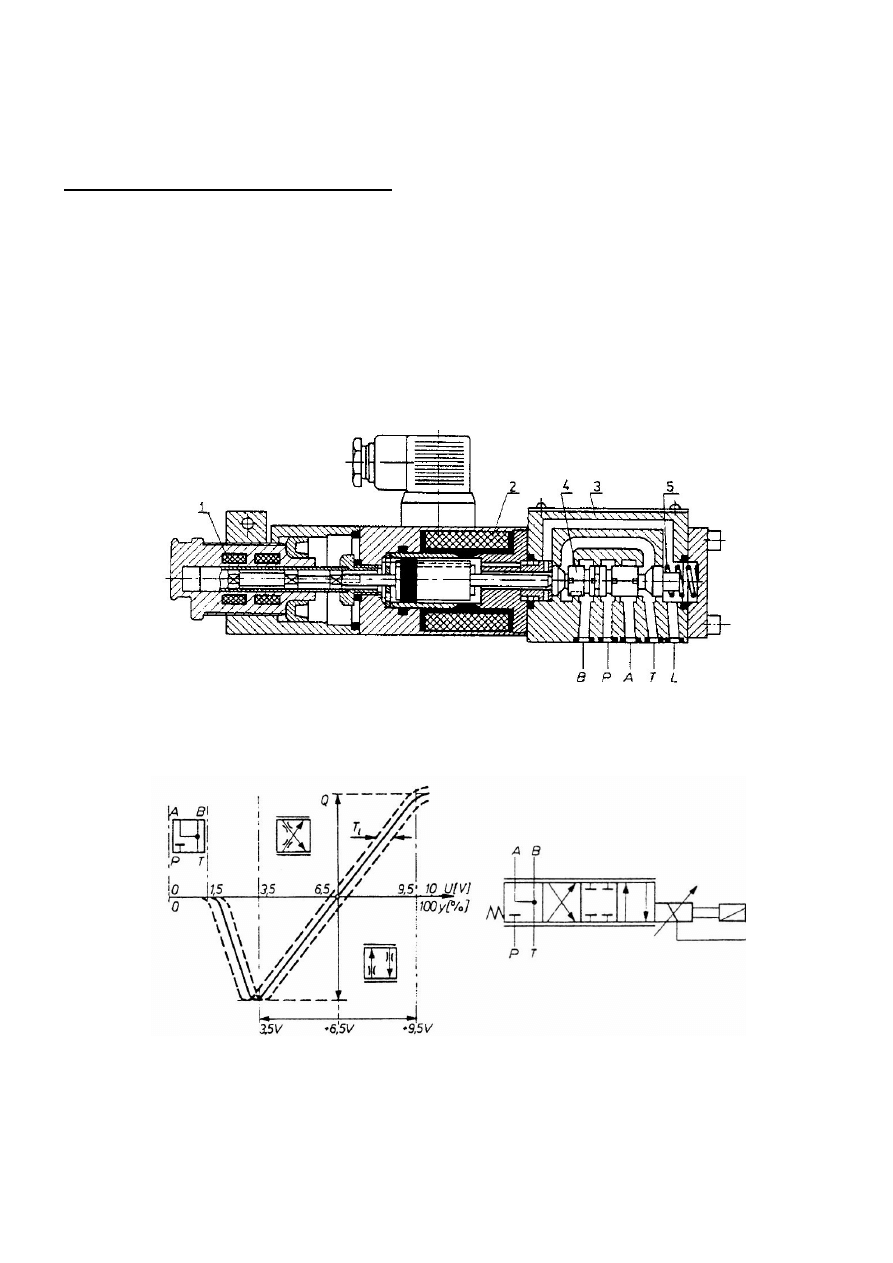
3. Budowa i działanie serwozaworu (wzmacniacza elektrohydraulicznego) f. Moog
Serwozawór (wzmacniacz elektrohydrauliczny) steruje kierunkiem i natężeniem przepływu przy
dużych częstotliwościach. Budowę serwozaworu przedstawiono na rysunku 2.
Wzmacniacz składa się z następujących zespołów:
- silnika momentowego,
- wzmacniacza pierwszego stopnia typu dysze-przysłona,
- wzmacniacza drugiego stopnia (suwak + kanały sterujące)
- oraz mechanicznego sprzężenia zwrotnego.
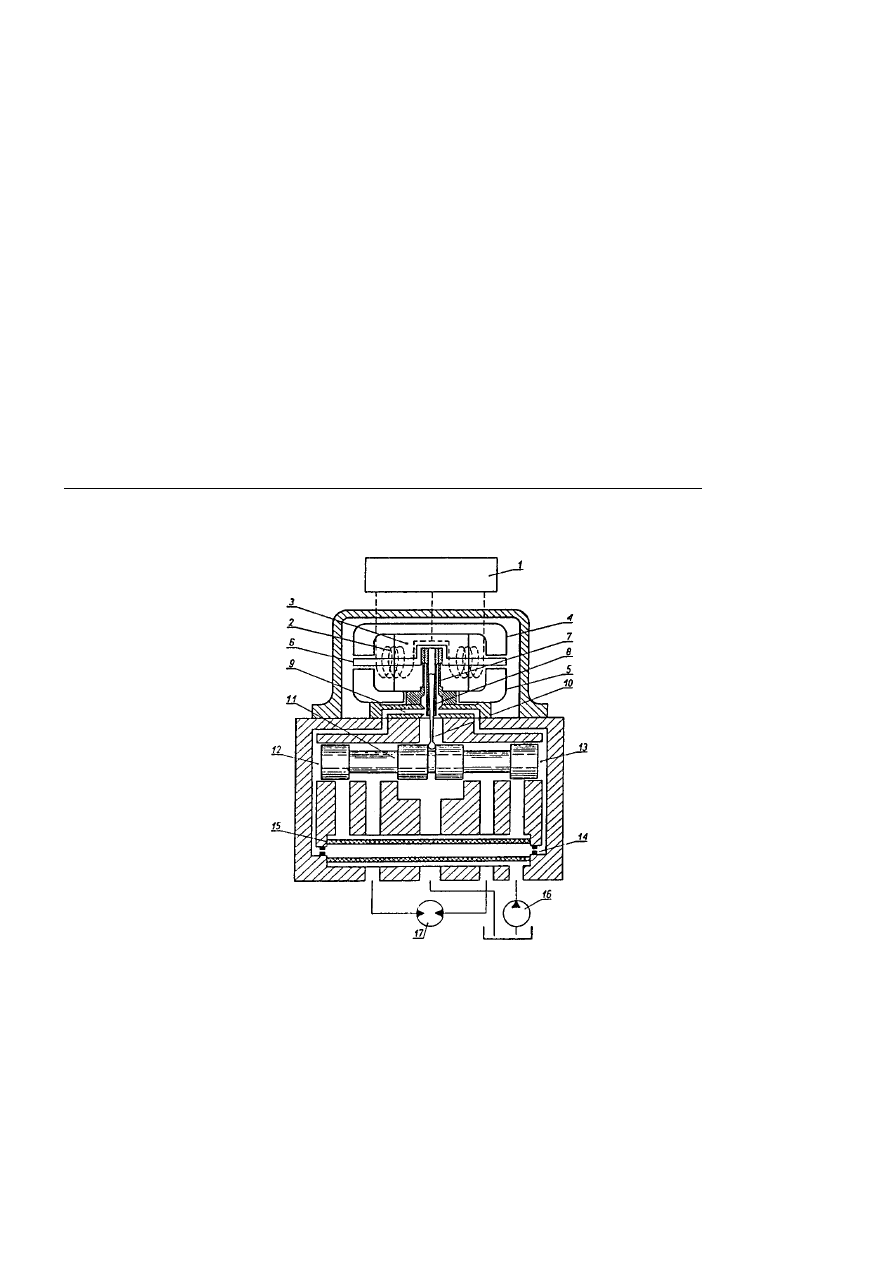
Rys. 2 Budowa serwozaworu: 1-sterownik elektroniczny, 2-cewki silnika momentowego, 3-magnes
stały, 4,5-osłonymagnesu, 6-zwora, 7-rurka sprężysta, 8-przysłona, 9-dysza, 10-pręt sprężysty
(ujemne sprzężenie zwrotne), 11-suwak, 12,13-czoła suwaka, 14-dławiki (kryzy), 15-filtr 3µm
Konspekt: Serwozawory
3
Sygnał prądowy dostarczany jest ze sterownika elektronicznego 1 do cewek 2 silnika
momentowego. Silnik przetwarza sygnał prądowy proporcjonalnie na moment obrotowy zwory 6. Zwora
wraz z przysłoną 8, połączona jest cienkościenną odkształcalną sprężyście rurką 7. Rurka ta podpiera
przegubowo przysłonę oraz oddziela szczelnie część hydrauliczną od silnika.
Olej do dysz dopływa przez dławiki 14. W środkowym położeniu przysłony kryzy dławiące 14 są tak
dobrane, aby spadek ciśnienia na nich wynosił połowę ciśnienia zasilania np. 10 MPa przy ciśnieniu
zasilania 20 MPa.
Wychylenie zwory powoduje zbliżenie np. przysłony 8 do lewej dyszy 9 oraz odsunięcie przysłony
od dyszy prawej. Zmniejszenie szczeliny wypływowej dla dyszy po lewej stronie powoduje zmniejszenie
ilości oleju wypływającego z dyszy a tym samym zmniejszenie spadku ciśnienia na niej np. do wartości
6 MPa. Stąd ciśnienie działające na czoło suwaka po lewej stronie wynosić będzie
20 MPa – 6 MPa =14 MPa. Dla dyszy po prawej stronie natężenie przepływu wzrośnie i wzrośnie również
spadek ciśnienia na tej dyszy np. do wartości 14 MPa. Ciśnienie działające po prawej stronie suwaka
wynosi 20 MPa – 14 MPa = 6 MPa. Całkowita różnica ciśnień działająca na suwak to 14 – 6 = 8 MPa.
Różnica ta pomnożona przez powierzchnię czoła suwaka daje siłę potrzebną na pokonanie oporów ruchu i
przyspieszanie suwaka. W środkowym położeniu przysłony różnica ciśnień działająca na czoła suwaka
wynosi zero ( 10 – 10 = 0 MPa).
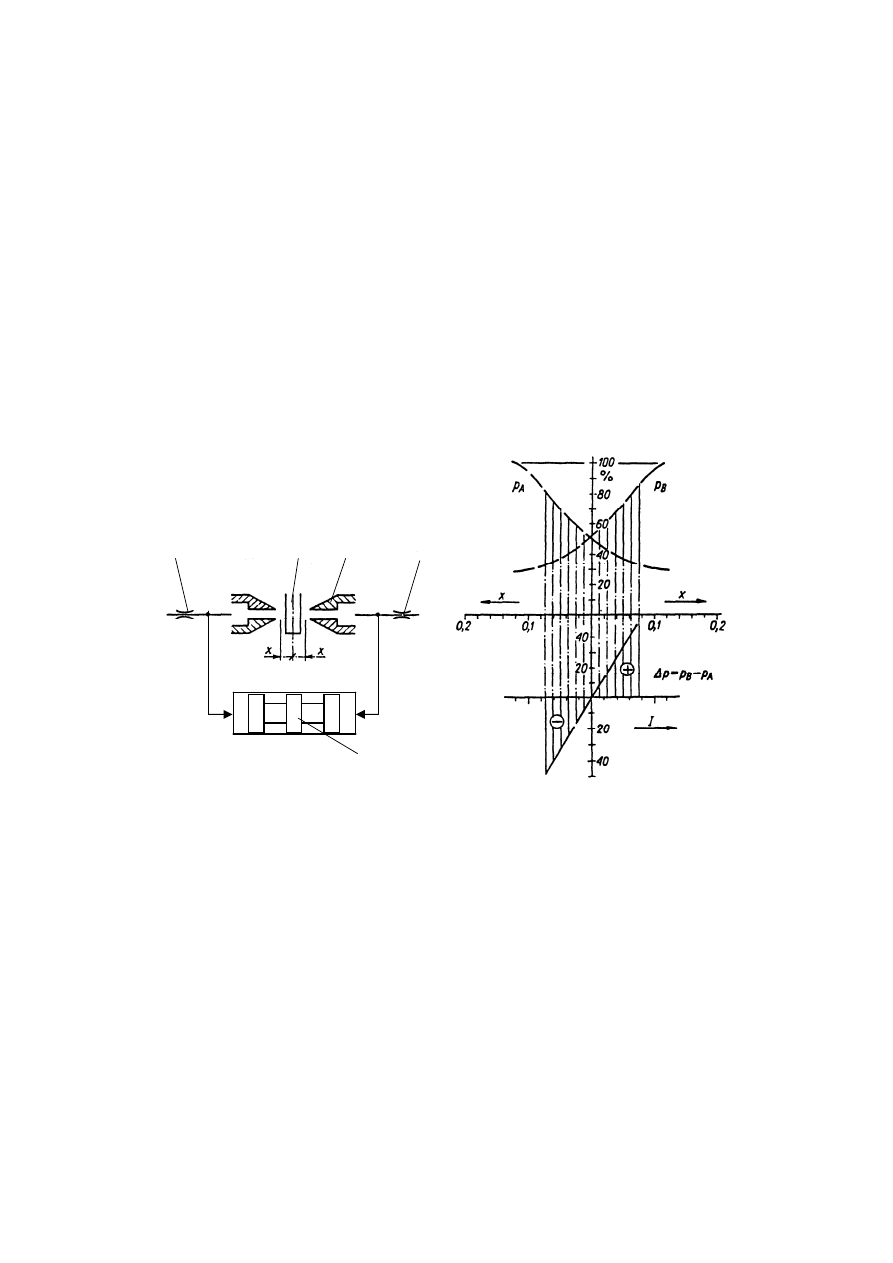
Dysze są dobrane i cały układ zestrojony tak, aby różnica ciśnień ∆p była liniową funkcją prądu
silnika. Przemieszczający się w prawo suwak 11 otwiera odpowiednio kanały przepływowe P-A lub P-B i
pociąga za sobą pręt sprężysty 10, który wywiera moment przeciwny do momentu silnika. Po osiągnięciu
wymaganego przemieszczenia suwaka ustala się równowaga obu momentów, a przysłona wraca w
położenie środkowe. Ciśnienia działające na powierzchnie suwaka wyrównują się. Pręt sprężysty 10 pełni
rolę mechanicznego sprzężenia zwrotnego.
Kierunek obrotu zwory jest określony biegunowością prądu, przy czym wartość kąta obrotu jest
proporcjonalna do natężenia prądu sterującego. Przy zaniku prądu zwora wraca do położenia środkowego.
Zasada działania serwozaworu polega więc na tym, że sygnał prądowy zamieniony jest w silniku
na przemieszczenie przysłony, które we wzmacniaczu pierwszego stopnia transformowane jest na różnicę
ciśnień, a ta z kolei jest przekształcona w drugim stopniu na przemieszczenie suwaka 11 sterującego
natężeniem przepływu w kanałach do odbiornika.
Jak widać z rysunku 2 para suwakowa (suwak-krawędzie kanałów sterujących) posiada przekrycia
zerowe, konieczne do pracy przy dużych prędkościach.
p
p
8
9
p
B
11
14
14
p
A
p
p
Rys. 3 Wzmacniacz typu dysze-przysłona oraz wykres różnicy ciśnień ∆p w funcji prądu
sterującego silnika
Konspekt: Serwozawory
4
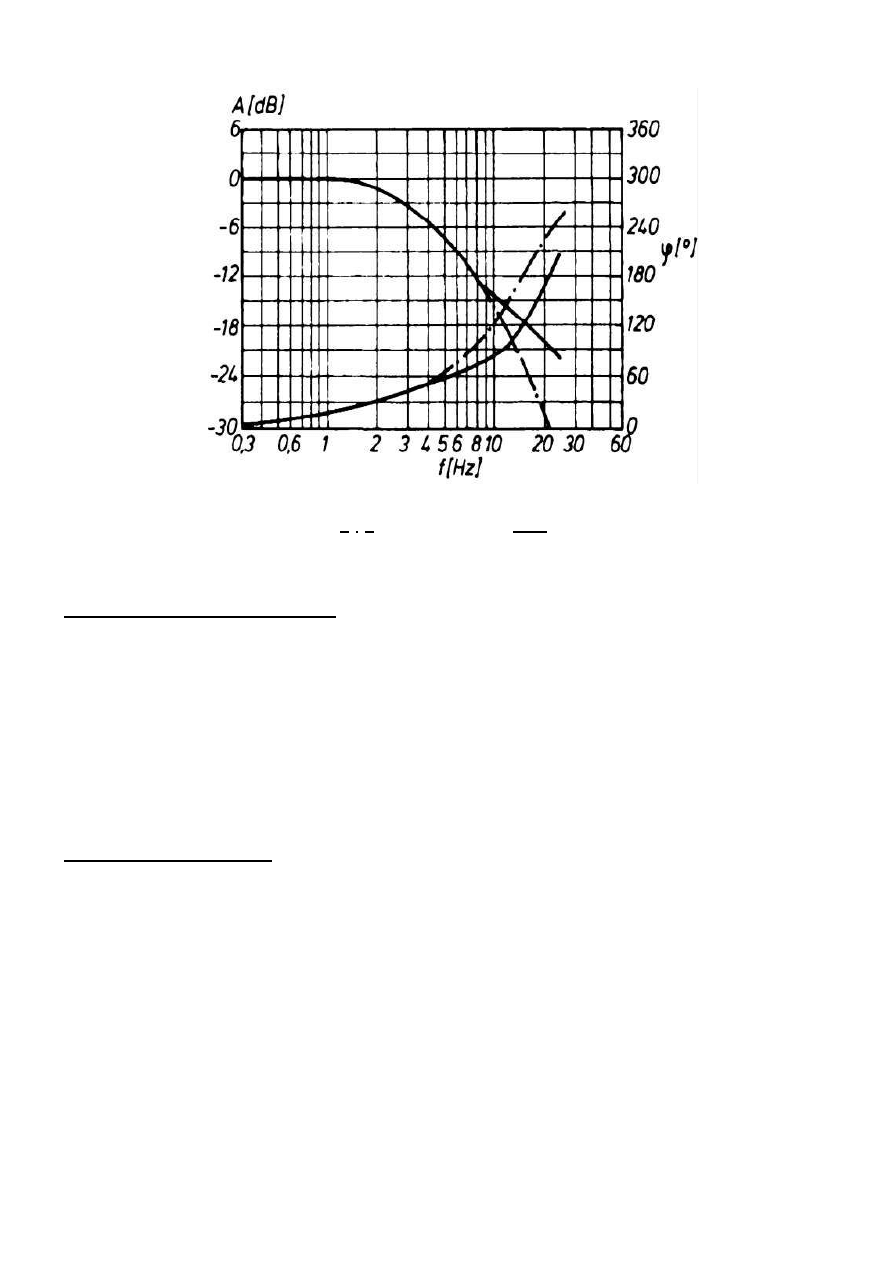
4. Charakterystyki serwozaworu (wzmacniacza elektrohydraulicznego)
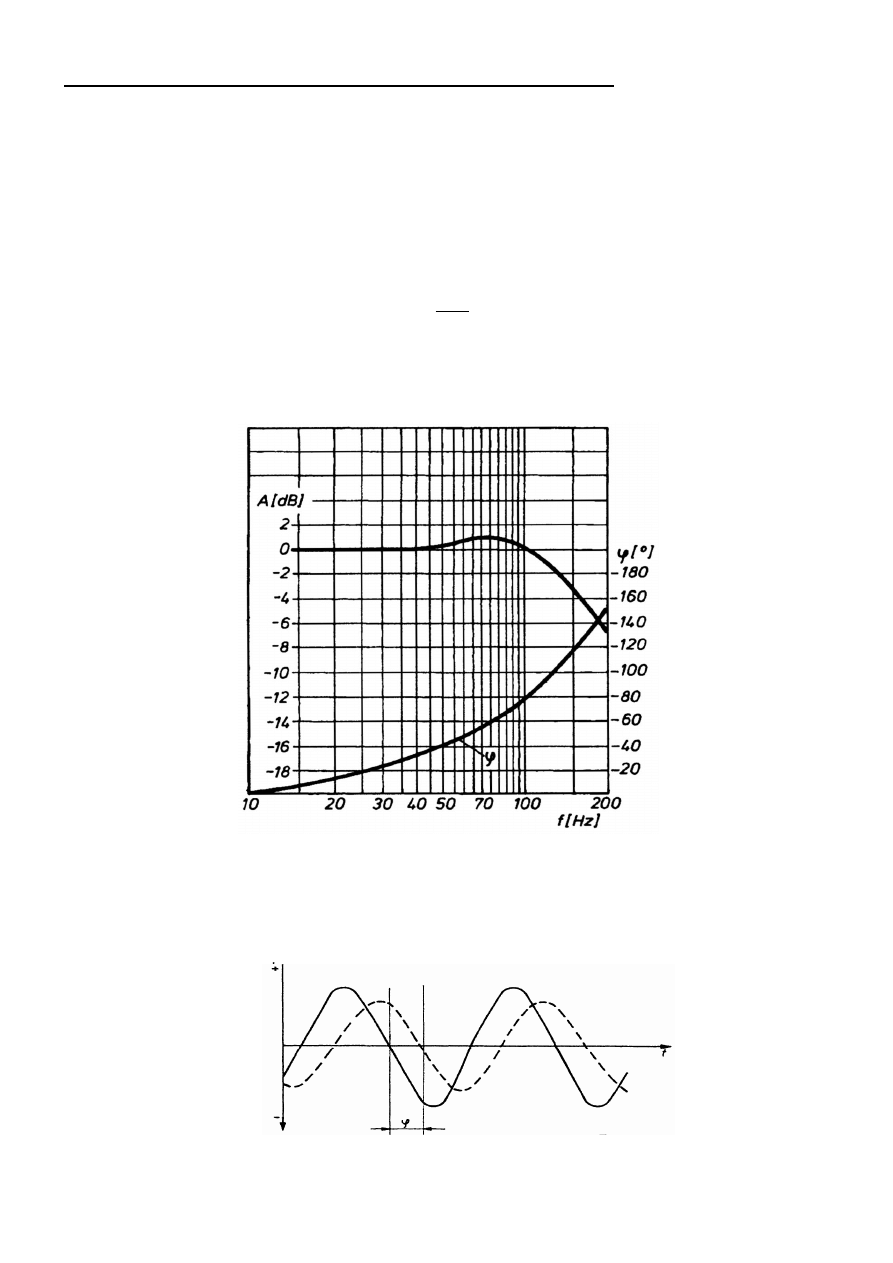
Na rysunku 4 przedstawiono charakterystyki: amplituda i przesunięcie fazowe w funkcji
częstotliwości pracy serwozaworu. Charakterystyka amplitudowa podaje zależność zrealizowanej
amplitudy w postaci natężenia przepływu dla serwozaworu w funkcji częstotliwości sygnału sterującego.
Widać, że od około 40 Hz następuje niewielki wzrost amplitudy. Przy sygnale sterującym powyżej 100 Hz
amplituda Q zmniejsza się. Jest to spowodowane krótkim czasem przesterowania suwaka i maleje ilość
oleju, która może wówczas przepłynąć przez kanały sterujące A, B (połączone z odbiornikiem)
serwozaworu.
Amplituda podawana jest w dB, gdzie:
Hz
Q
Q
dB
1
log
20
1
ψ
⋅
=
gdzie:
- Q
v
– natężenie przepływu przy częstotliwości ν sygnału sterującego,
- Q
1Hz
- natężenie przepływu przy częstotliwości 1 Hz sygnału sterującego
Przesunięcie fazowe opisuje opóźnienie sygnału odpowiedzi (natężenie przepływu przez serwozawór) w
stosunku do sygnału sterującego (rys.5).
Rys. 5 Opóźnienie sygnału odpowiedźi układu (linia przerywana) w stosunku do sygnału sterującego
Q
Rys.4 Przykładowa charakterystyka amplitudowo, fazowo-częstotliwościowa serwozaworu
Konspekt: Serwozawory
5
Częstotliwość graniczną pracy serwozaworu (z teorii regulacji) wyznacza spadek amplitudy o –3 dB lub
przesunięcie fazowe ϕ=90
0
. Odczytane wartości z wykresu różnią się między sobą, jednak w konkretnym
zastosowaniu decyduje najczęściej jedno kryterium.
5. Zawory proporcjonalne (przepływowe)
Rysunek 8 przedstawia charakterystyki rozdzielacza proporcjonalnego, który jest prostszy w
budowie niż serowzawór a przez to tańszy. Zakres realizowanych częstotliwości jest znacznie mniejszy w
porównaniu z serwozaworem i wynosi maksymalnie 10-20 Hz. Klasyczny rozdzielacz sterowany
elektrycznie ma częstotliwość przełączania 2 Hz (prąd zmienny) do 4Hz (prąd stały). Zawór
proporcjonalny (rys.6) zbudowany jest najczęściej z elektromagnesu proporcjonalnego (przetwornik
elektromechaniczny) oraz przetwornika mechaniczno-hydraulicznego, którym jest zawór suwakowy
przetwarzający sygnał mechaniczny na proporcjonalne ciśnienie lub natężenie przepływu. Zawory
proporcjonalne mogą być 1, 2, 3 – stopniowe. Nazwa zaworu została wzięta od elektromagnesu
sterującego, który ma liniową charakterystykę, tj. siła lub przesunięcie suwaka są proporcjonalne do
wartości prądu elektrycznego.
Rys. 6 Budowa zaworu proporcjonalnego: 1-czujnik położenia, 2-elektromagnes proporcjonalny, 3-zawór
suwakowy, 4-suwak, 5- sprężyna
Rys. 7 Charakterystyka przepływowa w funcji napięcia sterującego oraz symbol zaworu proporcjonalnego
Konspekt: Serwozawory
6
6. Serwomechanizmy hydrauliczne
Serwomechanizmem (serwonapędem) hydraulicznym nazywamy urządzenie sterujące ze
sprzężeniem zwrotnym o dużej dokładności działania i hydraulicznym wzmocnieniem mocy (siły lub
momentu). W serwomechanizmie wejściowy sygnał sterujący jest najczęściej zmienny i odpowiedzi
układu nadążają za zmianami tego sygnału. Stąd serwomechanizmy nazywane są także układami
nadążnymi lub śledzącymi.
Przykładowy schemat serwomechanizmu pokazano na rysunku 1 tego opracowania. Jest to typowy
serwomechanizm hydrauliczny z położeniowym sprzężeniem zwrotnym.
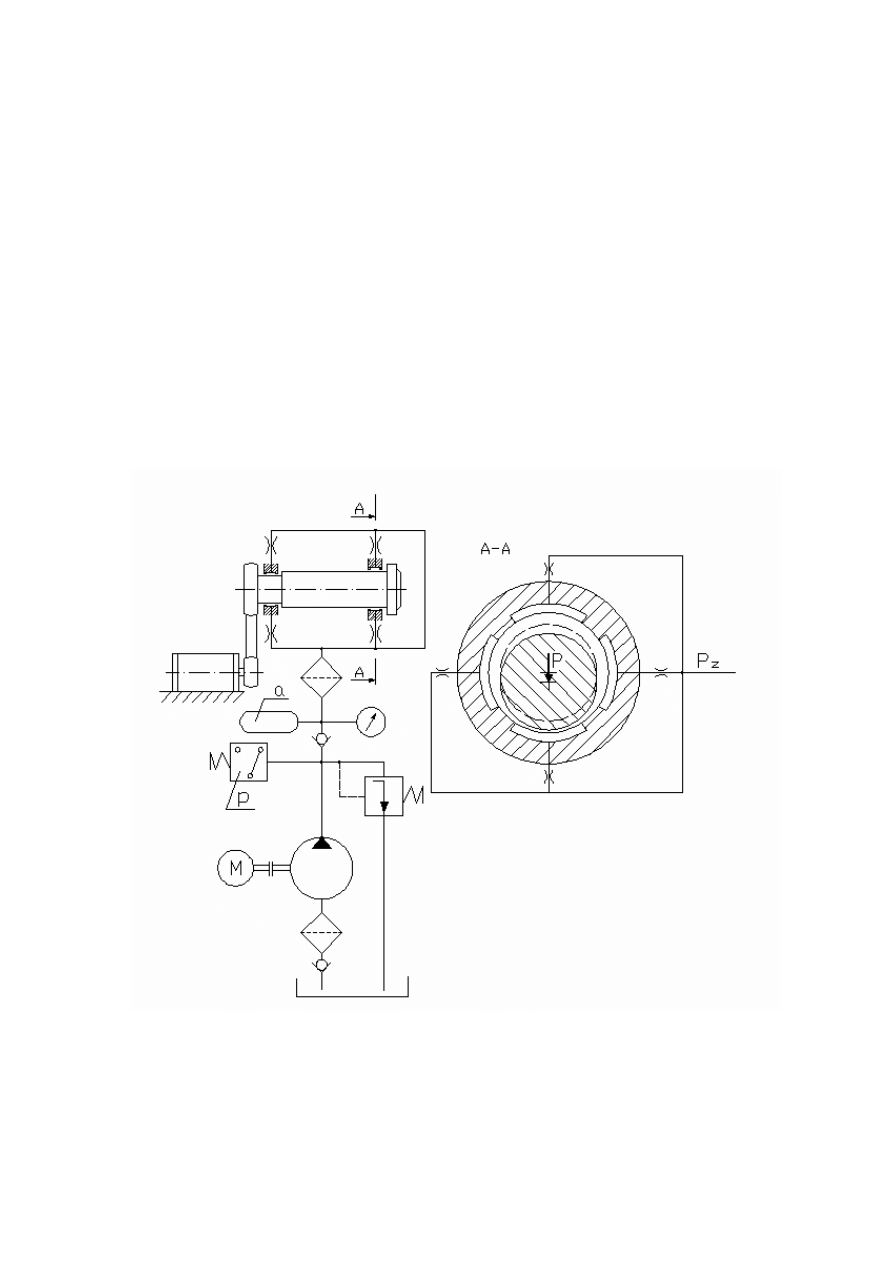
7. Łożysko hydrostatyczne
W łożyskach hydrostatycznych zrównoważenie obciążenia zewnętrznego następuje przez
wytworzenie odpowiednich wartości ciśnień statycznych w komorach nośnych łożyska. Olej do komór
nośnych dostarczany jest z pompy olejowej pod odpowiednim ciśnieniem statycznym przez dławiki.
Łożyska te mogą być poprzeczne i wzdłużne, dwu, cztero lub sześcio komorowe.
Do zalet łożysk hydrostatycznych zaliczamy:
- nośność i sztywność łożyska jest niezależna od prędkości obrotowej czopa (a nawet może być równa
zero),
- w łożysku występuje cały czas tarcie płynne dlatego elementy łożyska nie ulegają zużyciu przez
ścieranie, co pozwala też na wykonanie panewki tego łożyska ze stali a nie z drogiego np. brązu,
- nie wymagają tak dokładnego wykonania jak łożyska hydrodynamiczne z uwagi na znacznie większy luz
promieniowy (nawet 10 razy),
- znacznie mniejszy jest wpływ błędów kształtu czopa i panewki na dokładność obrotu wału (wrzeciona)
niż w łożyskach hydrodynamicznych,
Rys.8 Przykładowa charakterystyka amplitudowo, fazowo-częstotliwościowa zaworu
proporcjonalnego: prąd znamionowy, 25% prądu znamionowego
Konspekt: Serwozawory
7
- przy zastosowaniu odpowiednich członów automatycznej regulacji w układzie zasilania łożyska można
uzyskać sztywność nieskończenie wielką,
- lepiej tłumią drgania niż łożyska toczne (dorównują łożyskom hydrodynamicznym),
- korzystne warunki wymiany ciepła z otoczeniem (wypływający olej z łożyska odprowadza jednocześnie
ciepło wytworzone przez tarcie lepkie).
Wadami łożysk hydrostatycznych są duże koszty wykonania instalacji hydraulicznej oraz większe
koszty utrzymania obrabiarki w ruchu.
Zasada pracy łożyska hydrostatycznego podobna jest do pracy wzmacniacza hydraulicznego typu
dysze – przysłona. Olej z pompy dopływa poprzez dławiki do odpowiednich komór nośnych łożyska a z
komór nośnych wypływa w kierunku osiowym przez dławiki, którymi są luzy między czopem a panewką.
Jeśli do czopa przyłożymy obciążenie poprzeczne to następuje jego przemieszczenie z położenia
środkowego (rys. 9).
W komorze dolnej luzy (szczelina wypływowa oleju) się zmniejszają, a w górnej powiększają. Stąd z
dolnej komory nośnej wypływa mniej oleju i spadek ciśnienia na dławiki dopływowym do komory jest
mniejszy co powoduje, że ciśnienie w tej komorze wzrasta. W komorze górnej sytuacja jest odwrotna i
ciśnienie w tej komorze spada. Różnica ciśnień w obu komorach pomnożona przez powierzchnię nośną
komory daje siłę, która równoważy obciążenie zewnętrzne przyłożone do czopa.
Rys. 9 Schemat układu hydraulicznego zasilania łożyska hydrostatycznego oraz przekrój poprzeczny przez łożysko
Wyszukiwarka
Podobne podstrony:
39 Wzmacniacze elektrohydrauliczne zawory proporcjonalne i serwomechanizmy elektrohydrauliczne ppt
KVIab09.05- FORMATOWANIE ARKUSZA KALKULACYJNEGO, Konspekty dydaktyka
scenariusz 05 2006 w czasie deszczu, Konspekty
05 1 proporcjonalny
konspekt U. Lehowska - na 29.05, Bałagan - czas posprzątać i poukładać
konspekty kl VI, 05(06)-VIp, Paweł Witkowski
Kto rządzi konspekty, 05 Kto rzadzi zbor
Kto rządzi, konspekty 05-Kto rzadzi zbor
nr 05 jesienna relaksacja, KONSPEKTY
bak2, Konspekt zajęć popołudniowych prowadzonych dnia 05
Lekkoatletyka 05.09, konspekty AWF,WF, konspekty, konspekty, dziennik praktyk
2014 05 konspekt-final, Różne, Przygotowanie do ŚDM w Krakowie 2016 rok, Grudzień 2013 rok, Styczeń
konspekt 05-01-2009 -, Poniedziałek 05-01-2009
KONSPEKT---wyklad-2---Czlowiek-jako-miara-i-skala--Kanon-proporcji-czlowieka
05 04 16 KONSPEKT
konspekt zajec) 05 10
Biblijna nauka o grzechu-05, Kazania, Kaznodzieje i wykładowcy polscy, Kazimierz Sosulski, Seminariu
więcej podobnych podstron