PODSTAWY AUTOMATYKI
PODSTAWY AUTOMATYKI
Wyk
ład 1
Wyk
ład 1
Prowadz
ący:
Jan
Jan Syposz
Syposz
Wst
ępne informacje
Wst
ępne informacje
•
Podstawa zaliczenia wyk
ładu: kolokwium – 23.01.2010
•
Obecno
ść na wykładach: lista obecności.
•
Zakres tematyczny przedmiotu: (10 godzin wyk
ładów)
•
Wprowadzenie do uk
ładów automatycznej regulacji i sterowania.
•
Schematy blokowe uk
ładów sterowania i regulacji.
•
Struktura i zadania uk
ładu automatycznej regulacji.
•
W
łaściwości dynamiczne elementów automatyki.
•
Podstawowe algorytmy sterowania.
•
Ocena jako
ści regulacji.
•
Sygna
ły regulacyjne.
•
Regulatory: ci
ągłe i dwustawne – podstawy teoretyczne.
•
Elementy pomiarowe i wykonawcze - przegl
ąd.
LITERATURA
LITERATURA
1.
Kowal J.: Podstawy automatyki. Kraków 2003
2.
Praca zbiorowa.: Regelungs- und Steuerungstechnik in der Versorgungstechnik. C.F.
Muller. 2002.
Wprowadzenie do uk
ładów
Wprowadzenie do uk
ładów
automatycznej regulacji i
automatycznej regulacji i
sterowania
sterowania
Uk
ład regulacji
Uk
ład regulacji
Funkcje realizowane przez automatyk
ę w inżynierii środowiska:
- regulacja,
- sterowanie,
- zabezpieczenie,
- optymalizacja.
Uk
ład regulacji jest połączeniem elementów automatyki, które
wspó
łdziałają ze sobą realizując wyznaczone zadanie.
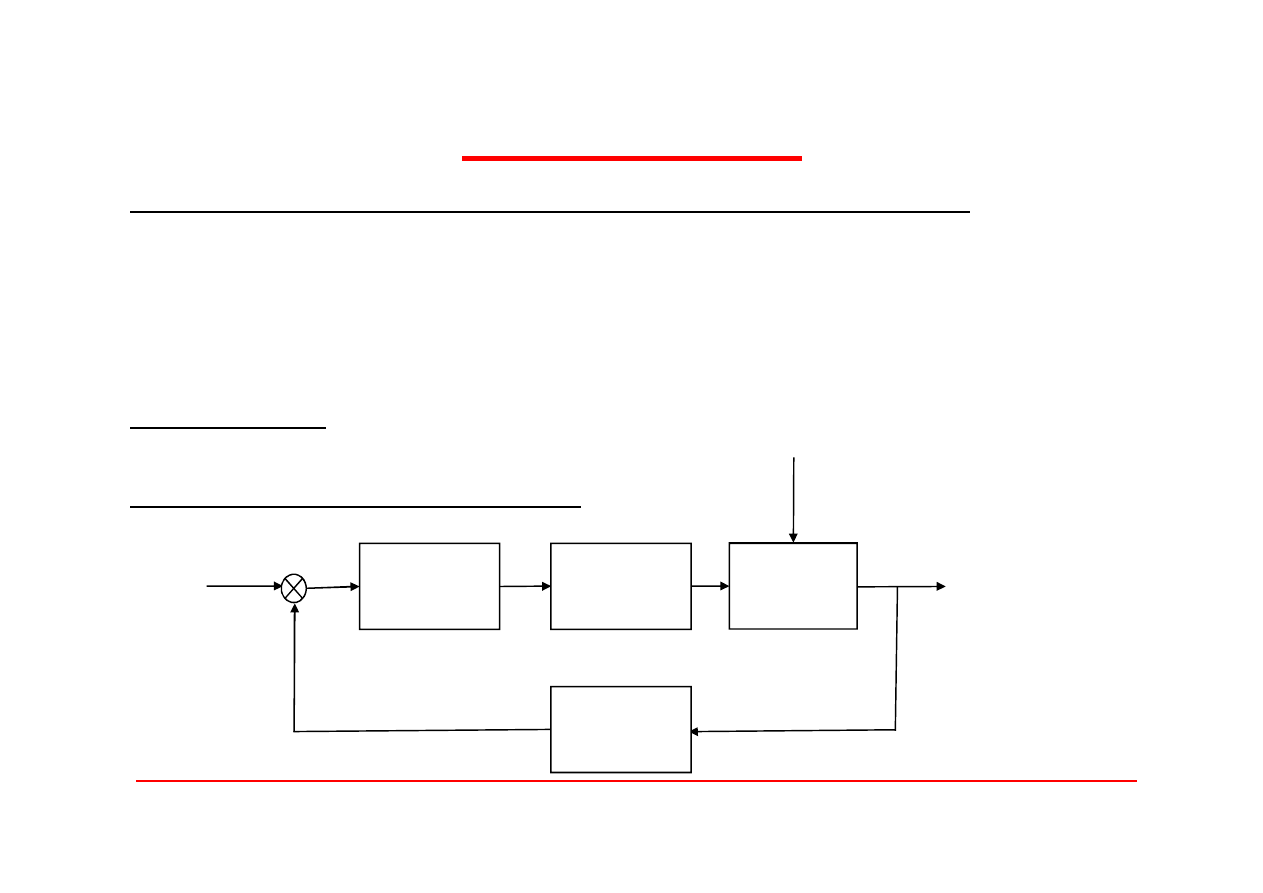
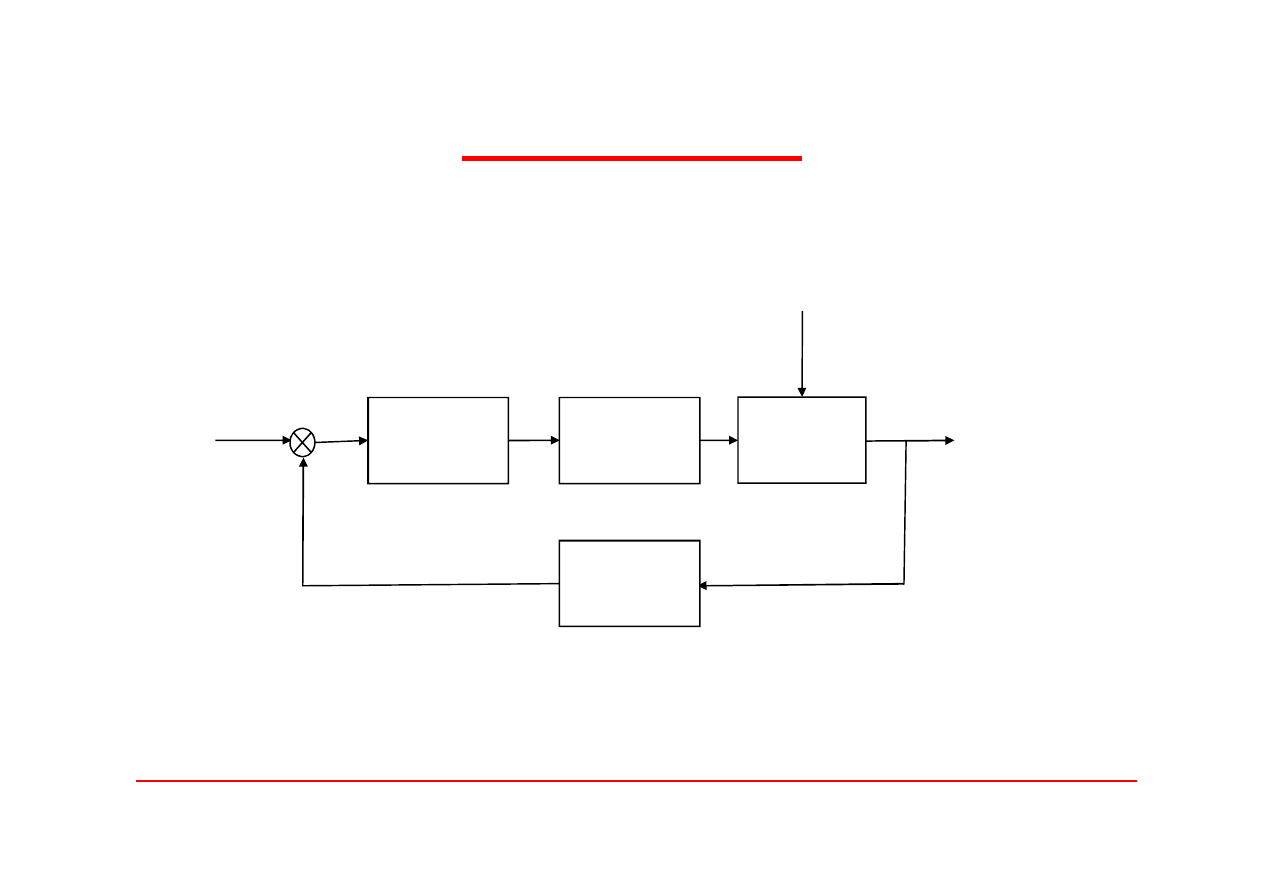
Schemat blokowy uk
ładu regulacji
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
+_
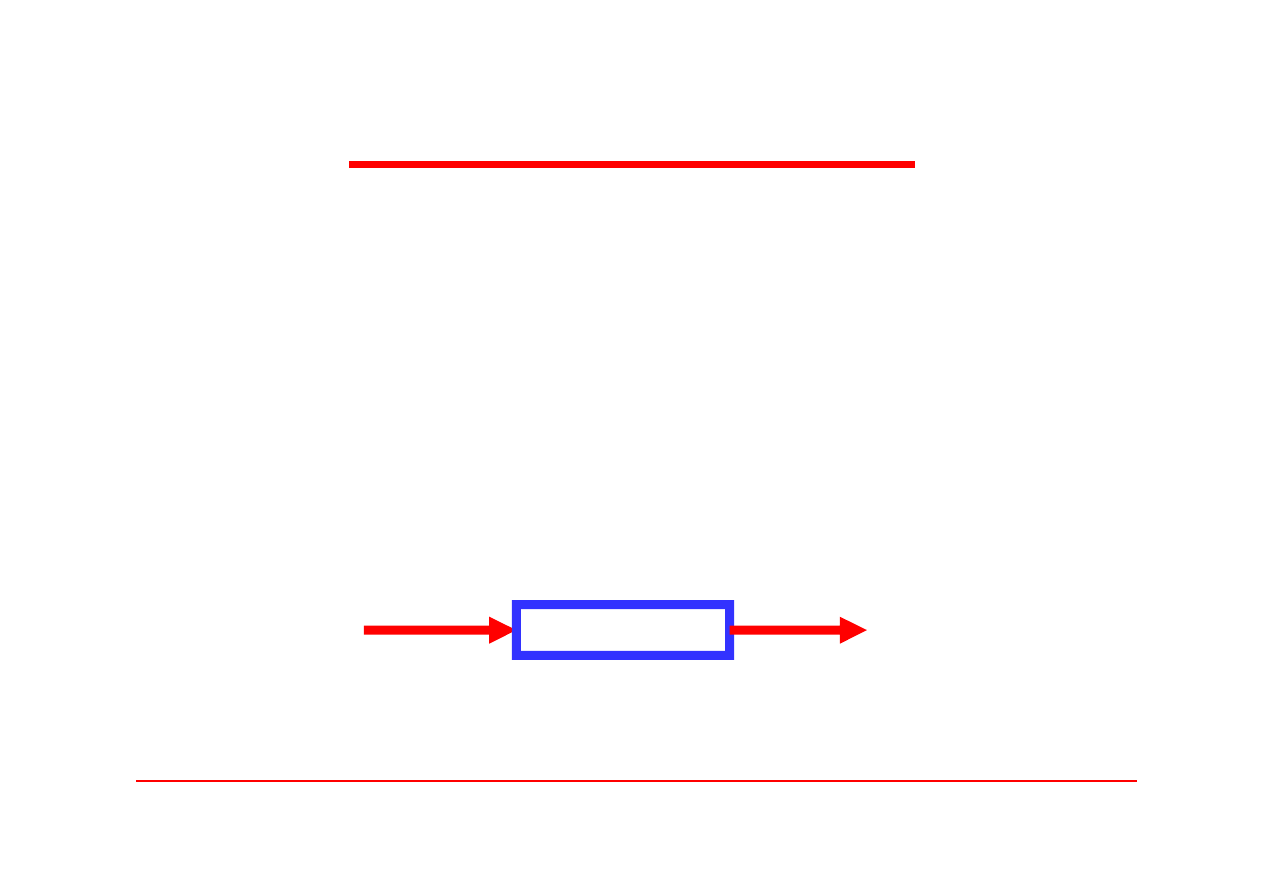
Element automatyki
Element automatyki
• Element automatyki jest to urz
ądzenie posiadające sygnał
wej
ściowy i wyjściowy
• Elementy
liniowe
s
ą
to
takie
elementy,
których
matematyczny opis ma posta
ć zależności liniowych.
• Elementy nieliniowe s
ą opisywane za pomocą nieliniowych
równa
ń algebraicznych, różnicowych lub różniczkowych.
element automatyki
x
sygna
ł
wej
ściowy
y
sygna
ł
wyj
ściowy
Obiekt regulacji
Obiekt regulacji
•
Obiektem regulacji mo
że być urządzenie, zespół urządzeń lub proces
technologiczny, w którym w wyniku zewn
ętrznych oddziaływań realizuje
si
ę pożądany algorytm działania.
•
Na obiekt regulacji oddzia
łują zmienne wejściowe nazywane sygnałami
nastawiaj
ącymi
u
oraz zmienne szkodliwe nazywane sygna
łami
zak
łócającymi
z
.
•
Sygna
ły wejściowe
wp
ływają na sygnały wyjściowe nazywane
zmiennymi regulowanymi
y
.
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
+_
Warto
ść zadana, zakłócenie
Warto
ść zadana, zakłócenie
•
Zak
łócenie
z
jest sygna
łem wywierającym niekorzystny wpływ na
warto
ść wielkości regulowanej
y
.
•
Zak
łócenia generowane poza systemem są sygnałami wejściowymi do
obiektu regulacji.
•
Warto
ść zadana
w
wielko
ści regulowanej jest określona przez
wielko
ść wiodącą w procesie regulacji.
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
+_
Regulator
Regulator
•
Regulator jest to element uk
ładu regulacji, którego zadaniem jest
wytworzenie sygna
łu sterującego wpływającego na przebieg wielkości
regulowanej. Sygna
łem wejściowym regulatora jest uchyb regulacji
e
,
a sygna
łem wyjściowym wielkość sterująca
u
.
•
Uchyb regulacji
e
otrzymuje si
ę w regulatorze w wyniku porównania
warto
ści zadanej
w
oraz warto
ści wielkości regulowanej
y
.
e = w – y
Regulator zale
żnie od uchybu regulacji odpowiednio zmienia sygnał
steruj
ący
u
tak aby spe
łnić warunek równości wielkości regulowanej i
warto
ści zadanej
y=w
.
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
+/-
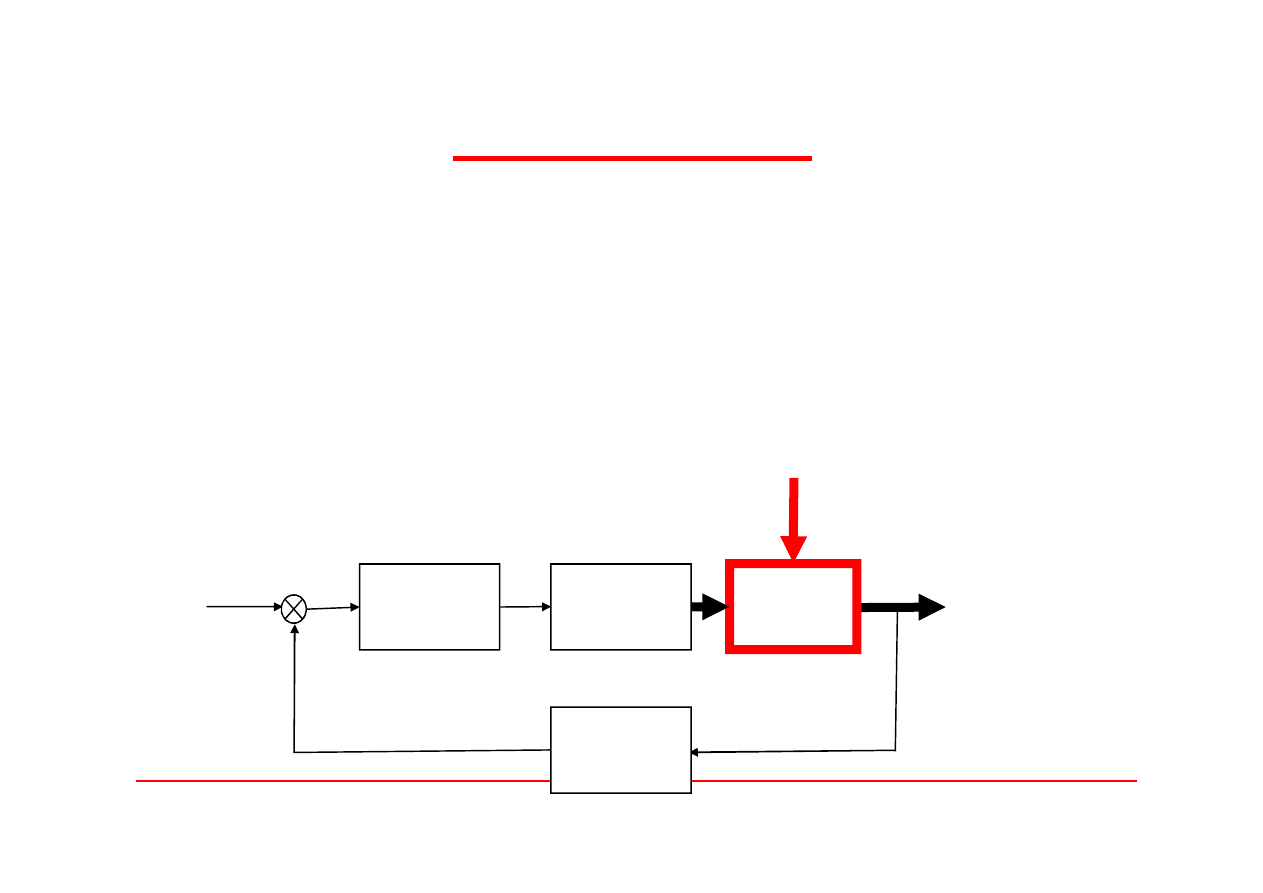
Urz
ądzenie wykonawcze
Urz
ądzenie wykonawcze
•
Urz
ądzenie wykonawcze składa się z elementu napędowego oraz
elementu wykonawczego.
•
Element
wykonawczy
jest
to
urz
ądzenie wymuszające zmiany
wielko
ści regulowanej.
•
W systemach grzewczych i wodoci
ągowych elementem wykonawczym
jest
najcz
ęściej
pompa
i
zawór
regulacyjny
.
W
systemach
wentylacyjnych
wentylator
i
przepustnica
.
W
urz
ądzeniach
transportowych –
podajnik, przeno
śnik
.
•
Element nap
ędowy służy jako napęd (
silnik, si
łownik
) elementu
wykonawczego.
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
+_
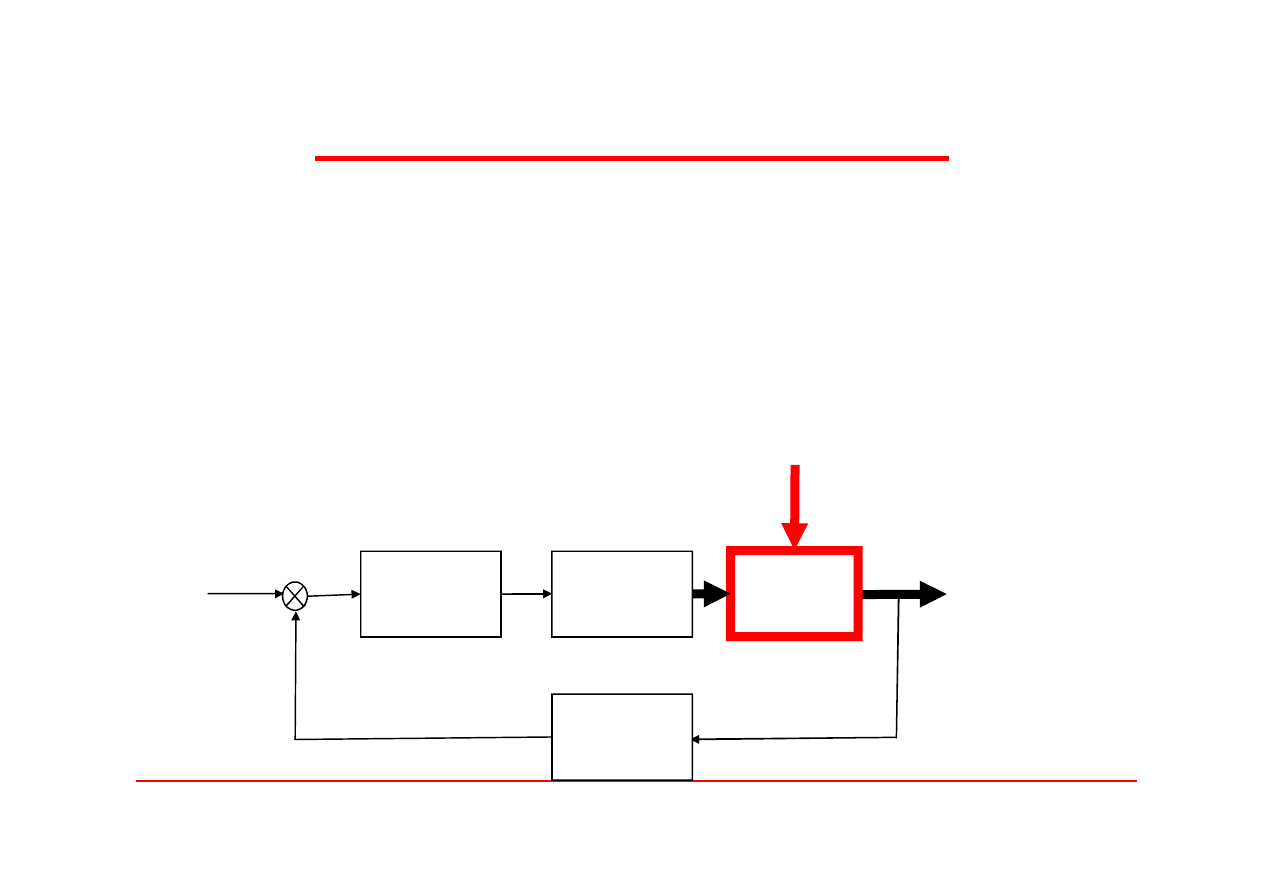
Element pomiarowy
Element pomiarowy
• Element pomiarowy jest to cz
ęść układu regulacji, której
zadaniem jest pomiar wielko
ści regulowanej
y
oraz
wytworzenie sygna
łu
y
m
dogodnego do wprowadzenia do
regulatora.
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
+_
SCHEMATY BLOKOWE
SCHEMATY BLOKOWE
•
W technice regulacji struktur
ę i działanie układu automatyki przedstawia
si
ę często w formie graficznej w postaci schematu blokowego.
•
Elementarne bloki s
ą członami obwodu regulacyjnego, każdy z nich ma
wielko
ść wejściową i wyjściową.
•
Bloki s
ą rysowane w postaci prostokątów z umieszczonymi wewnątrz
informacjami opisuj
ącymi ich właściwości.
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
+_
W
ęzły informacyjne
W
ęzły informacyjne
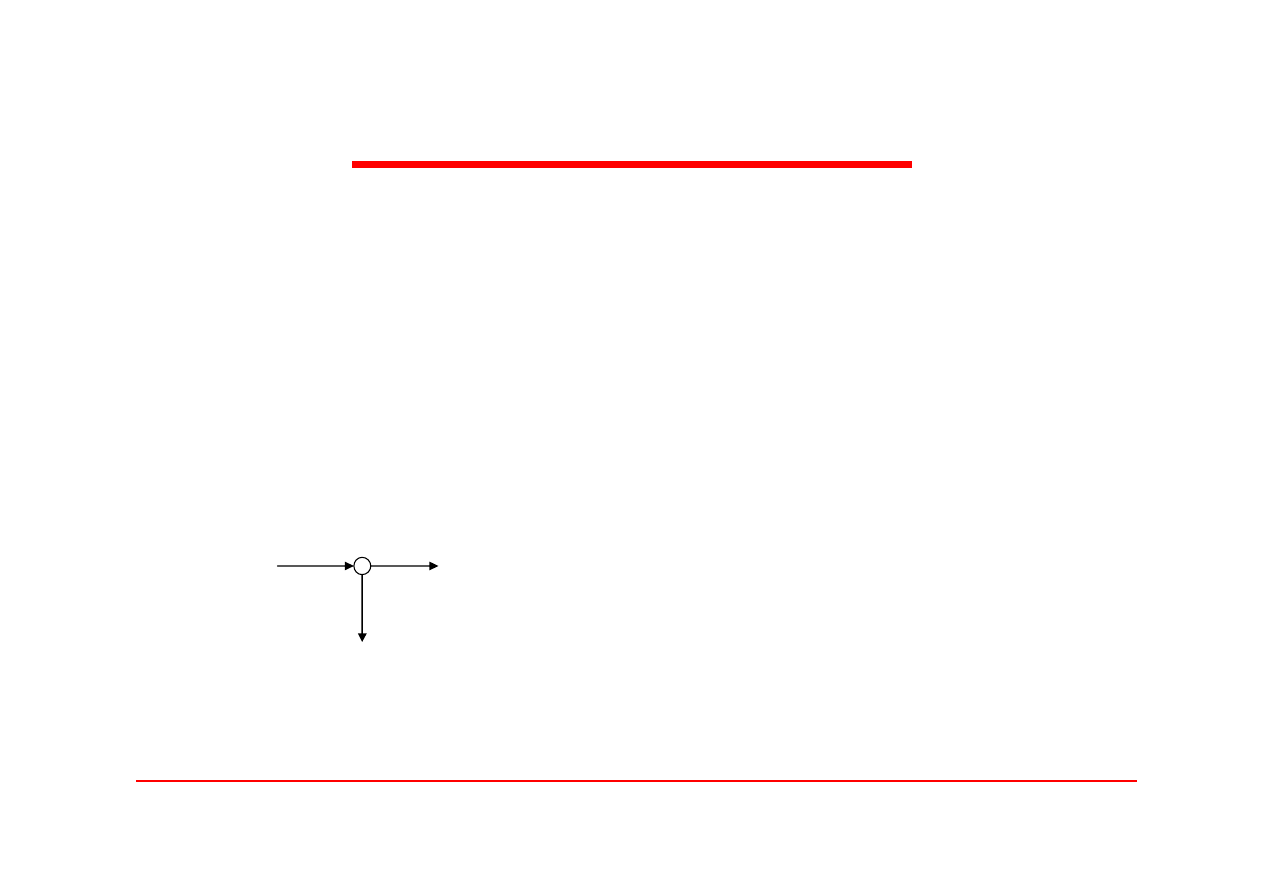
•
W
ęzły informacyjne umożliwiają przekazanie tej samej informacji do
kilku ró
żnych punktów schematu blokowego (jedno wejście i co najmniej
dwa wyj
ścia)
•
Schemat w
ęzła informacyjnego
x
x
x
W
ęzły sumujące
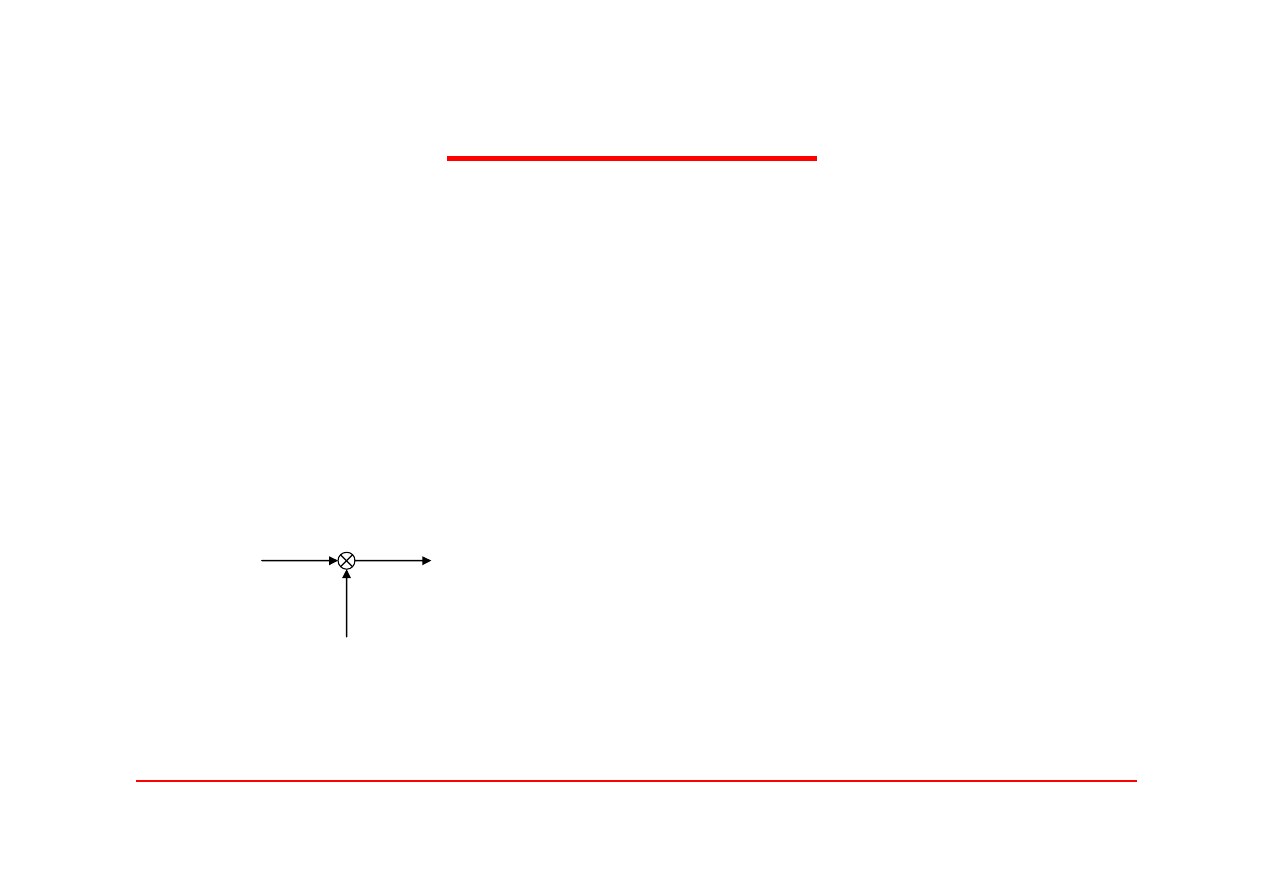
W
ęzły sumujące
• W
ęzły sumujące (porównujące) umożliwiają algebraiczne
sumowanie kilku sygna
łów (jedno wyjście i co najmniej dwa
wej
ścia)
• Schemat w
ęzła sumującego
w
e
y
±
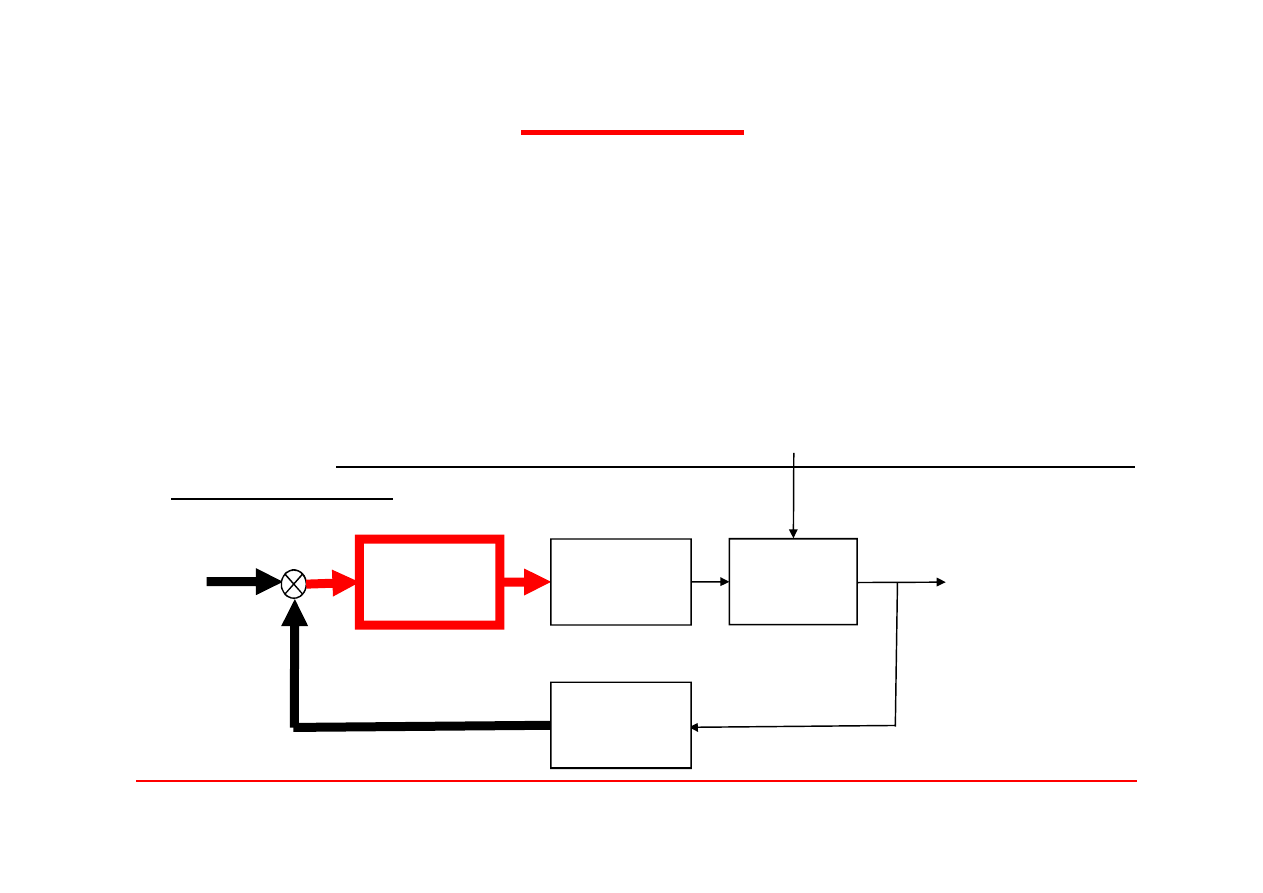
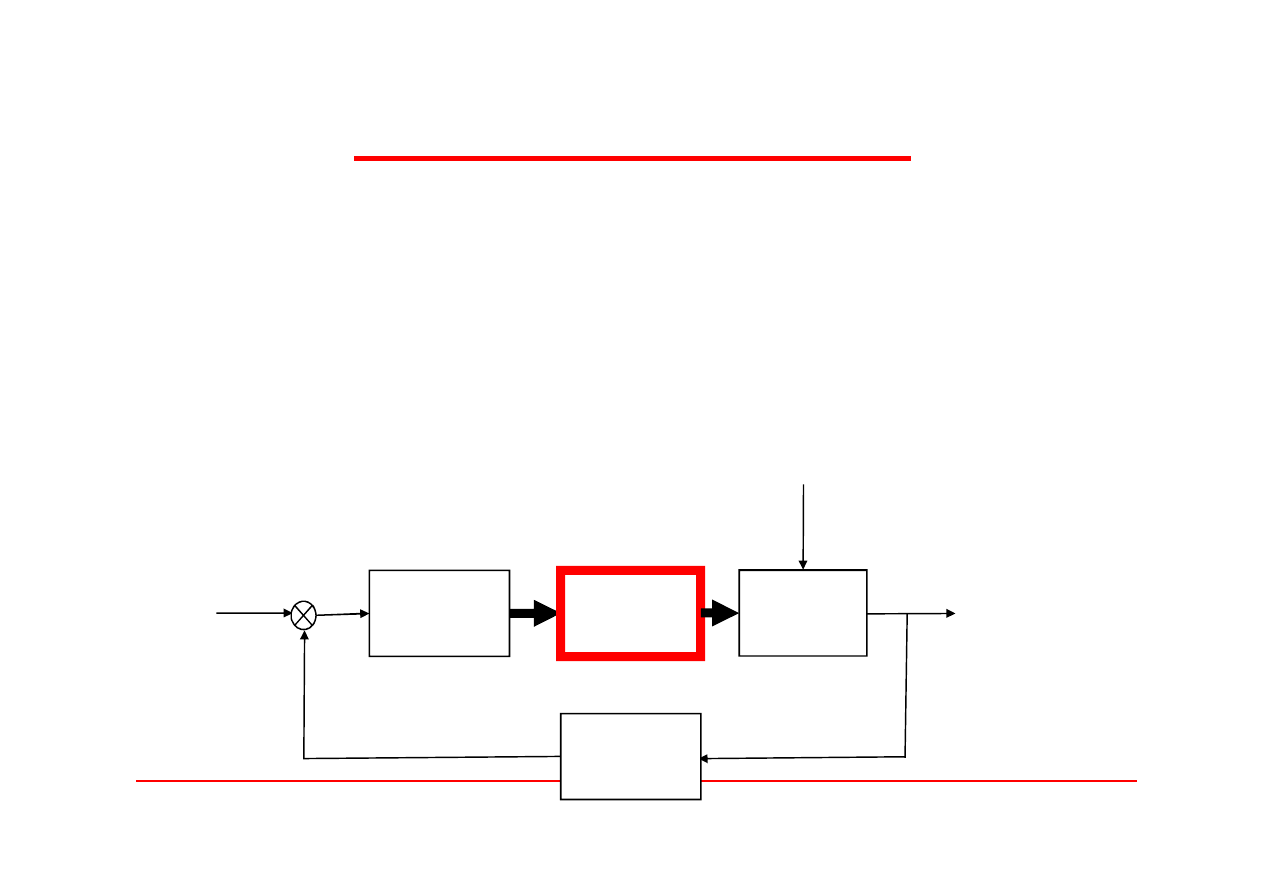
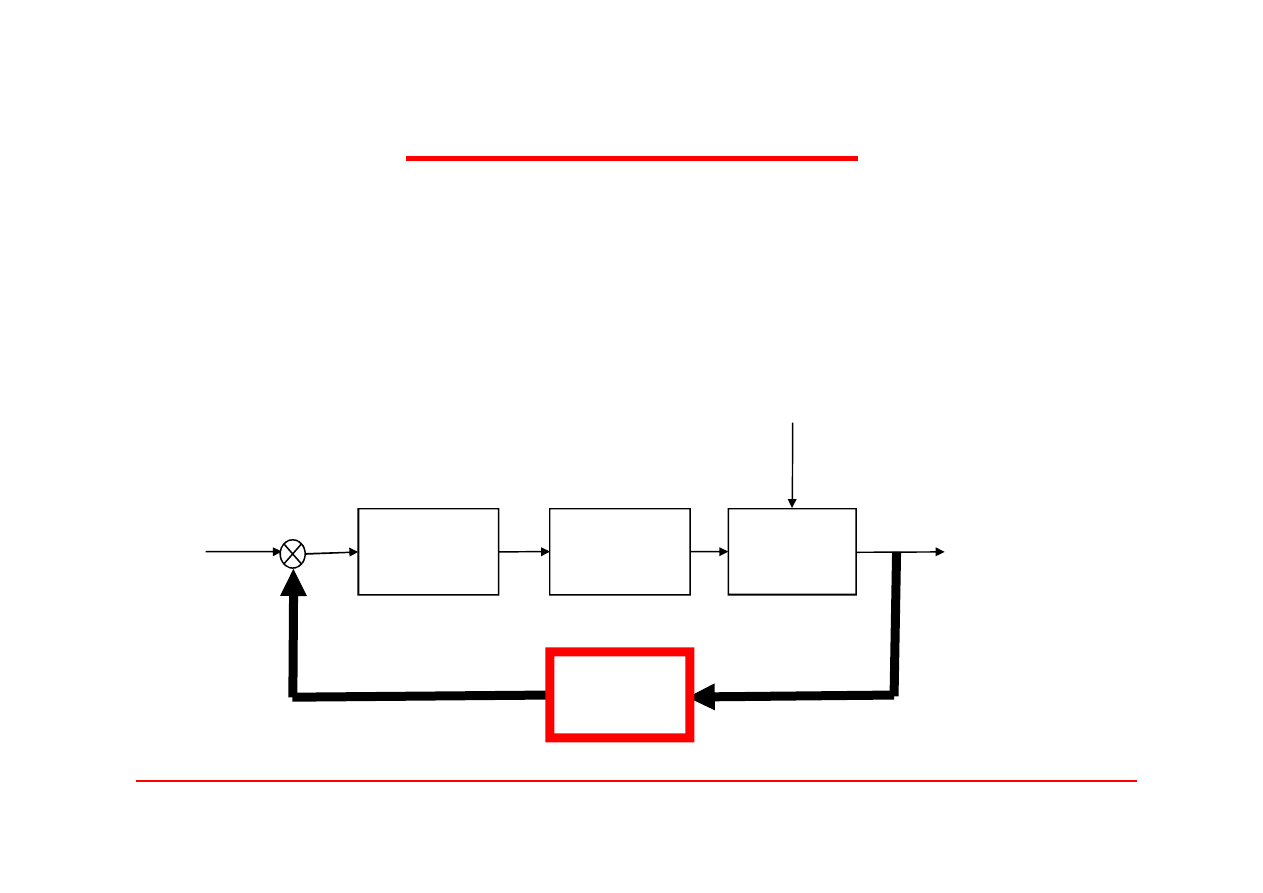
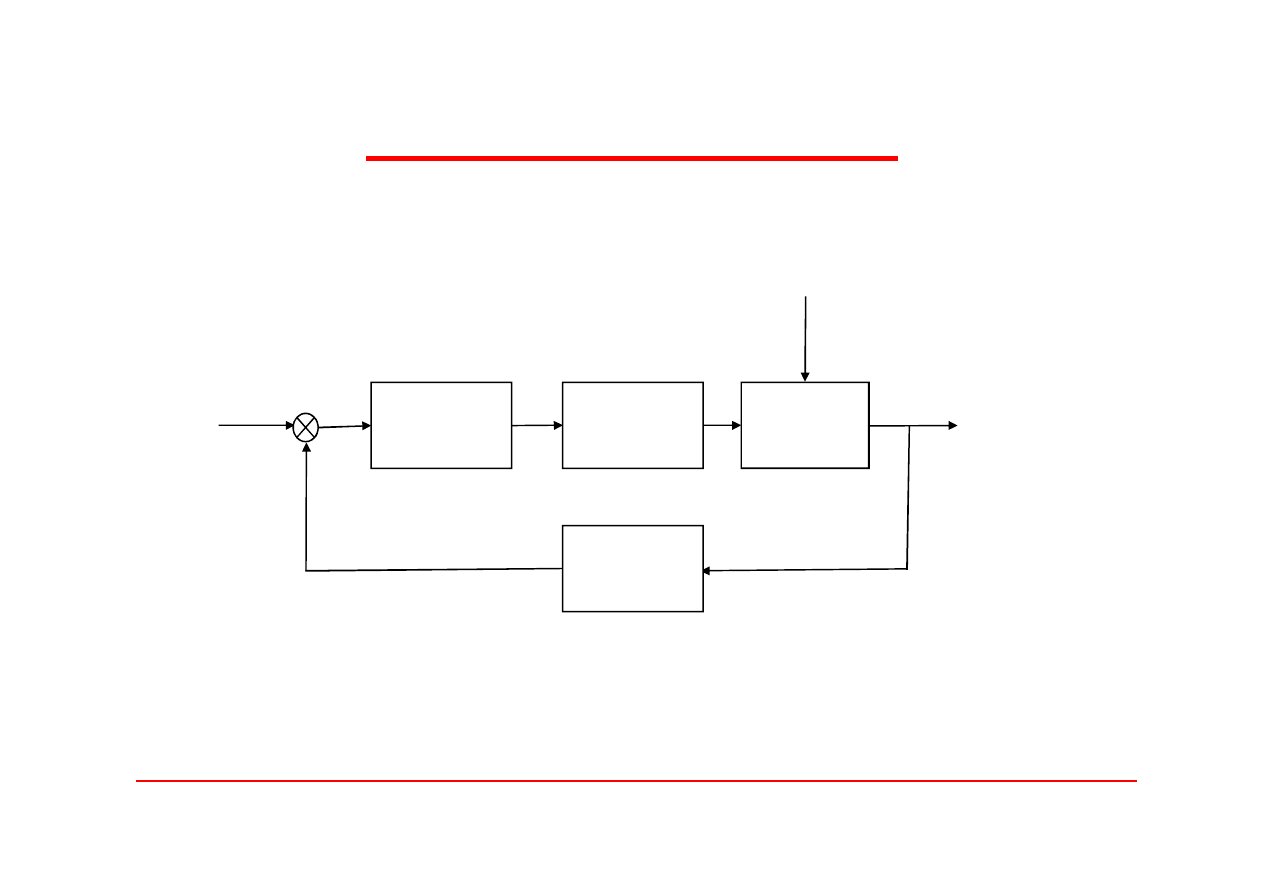
ŁĄCZENIE BLOKÓW
ŁĄCZENIE BLOKÓW
Podstawowe bloki mog
ą być połączone:
• szeregowo,
• równolegle
• lub w uk
ładzie ze sprzężeniem zwrotnym.
W ka
żdym z wymienionych połączeń można wyznaczyć
wypadkow
ą zależność między sygnałem wejściowym a
sygna
łem wyjściowym.
Zale
żność między tymi sygnałami nazywana jest
transmitancj
ą.
Po
łączenie szeregowe
Po
łączenie szeregowe
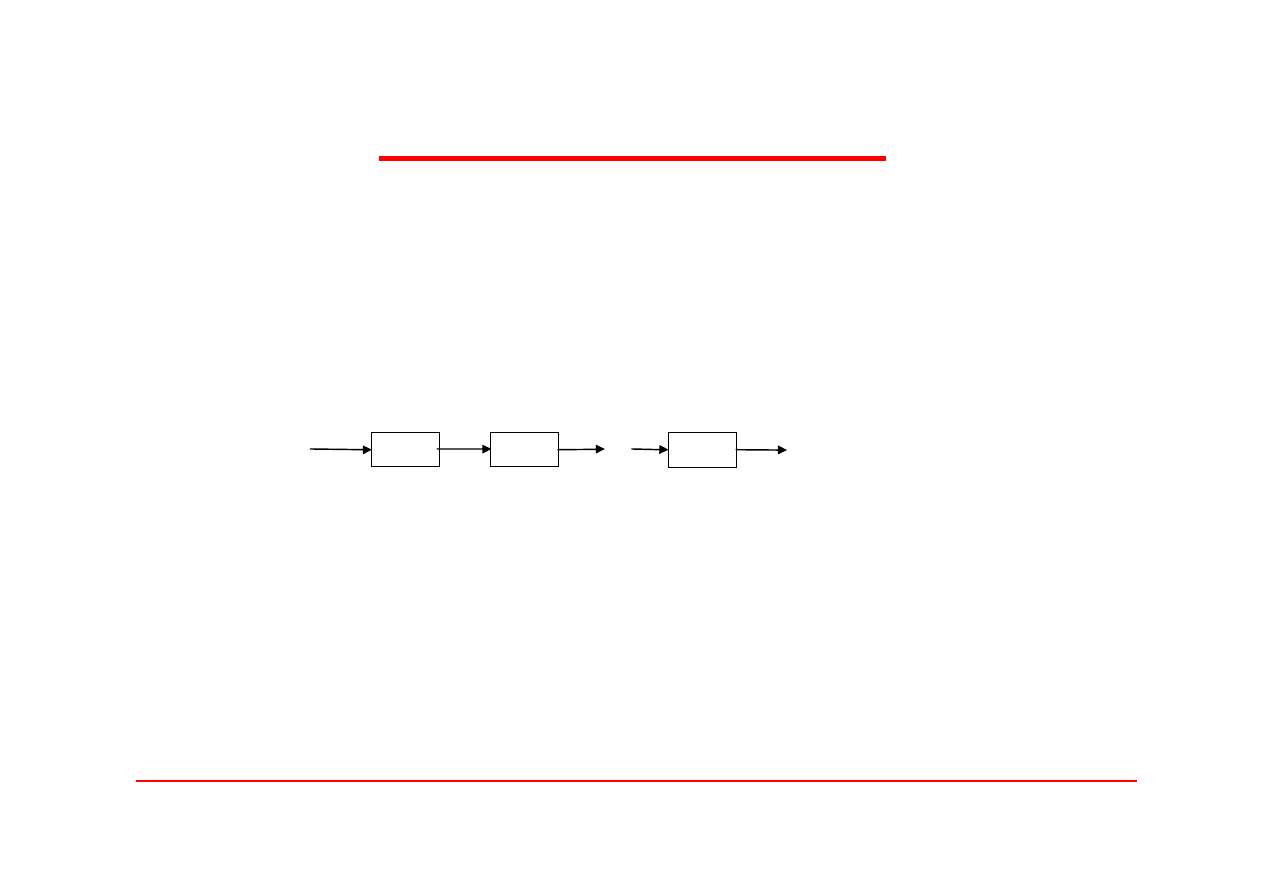
•
Po
łączenie szeregowe charakteryzuje się tym, że sygnał wyjściowy
jednego bloku jest sygna
łem wejściowym bloku następnego.
•
Po
łączenie to nazywane jest również połączeniem kaskadowym.
•
Transmitancja wypadkowa jest iloczynem transmitancji.
•
G
w =
G
1
· G
2
· ... · G
n
u
G
1
G
2
……
G
n
y
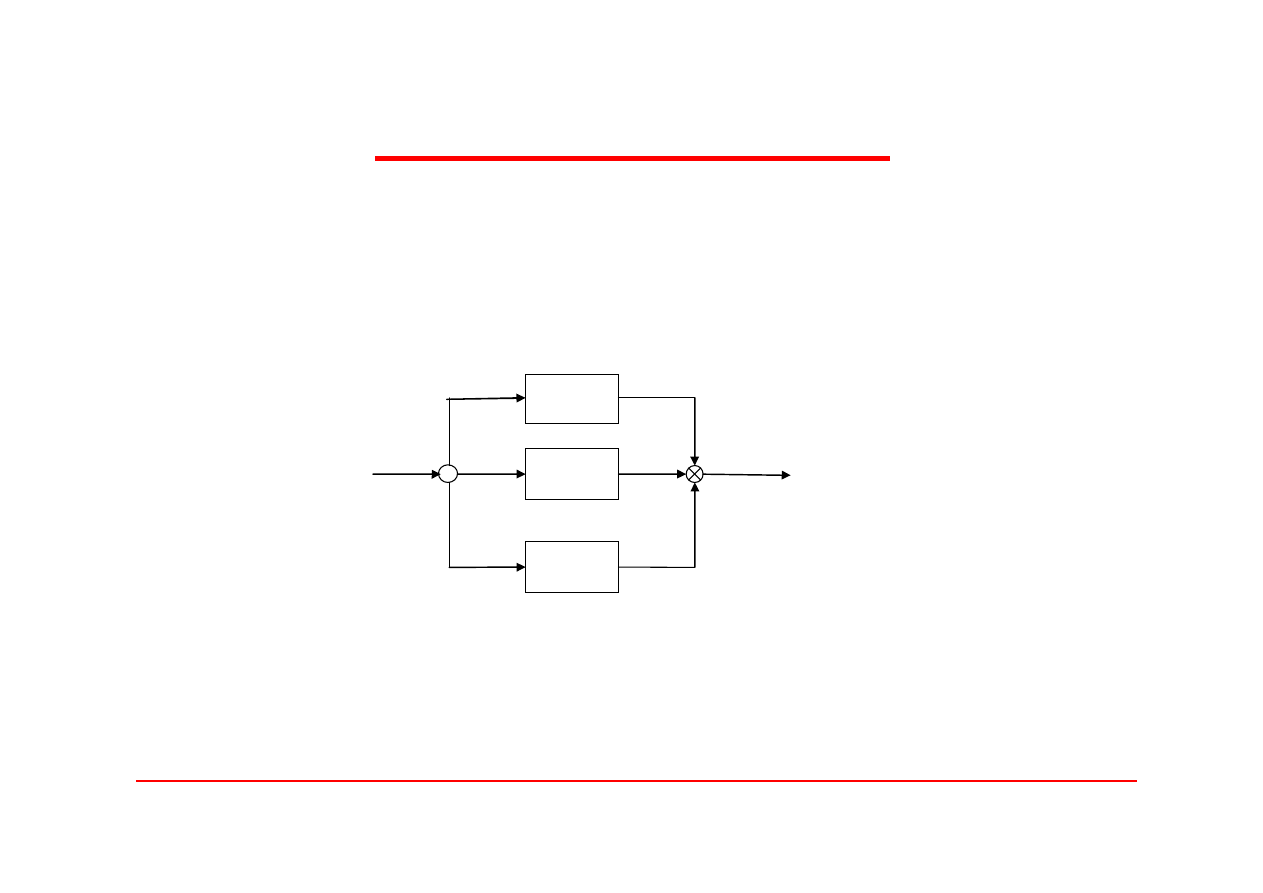
Po
łączenie równoległe
Po
łączenie równoległe
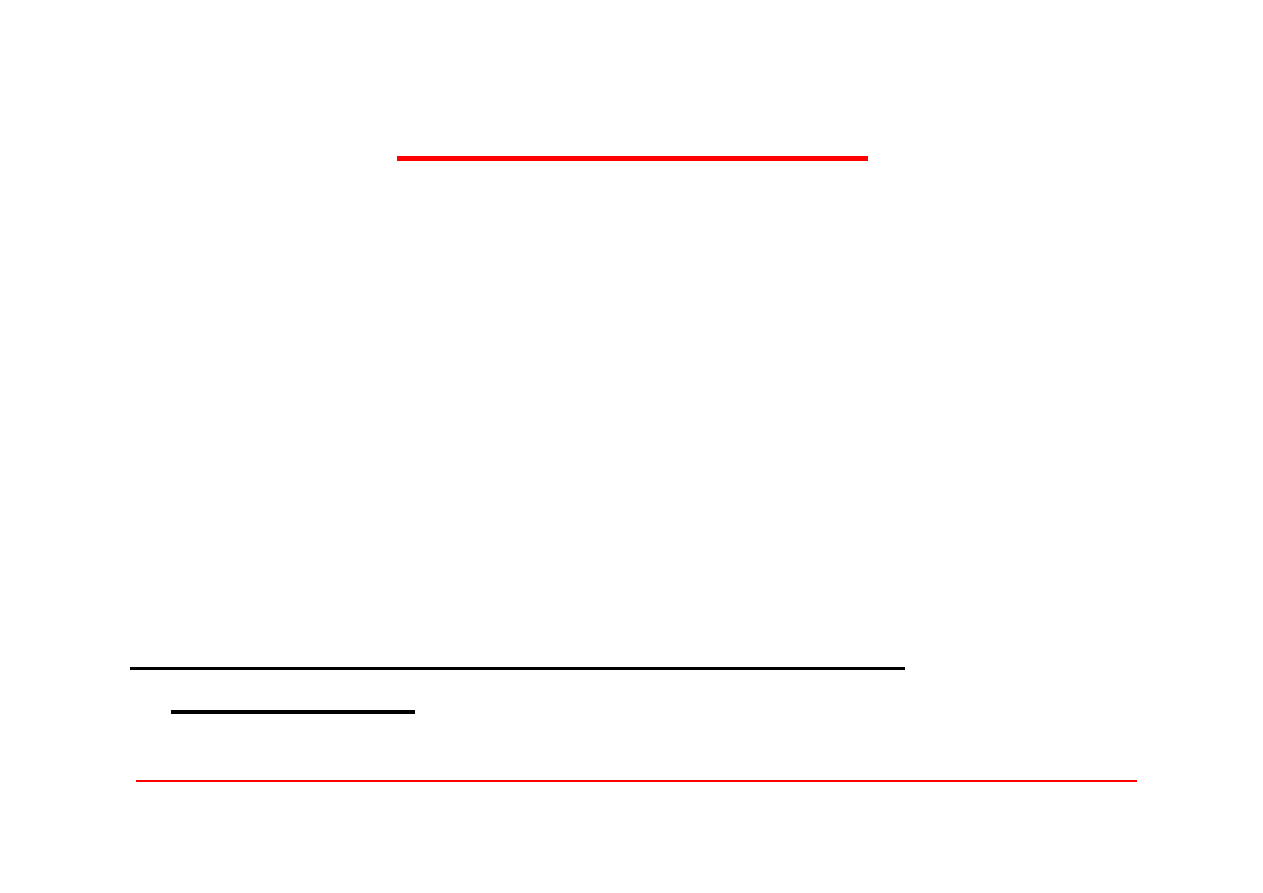
•
Po
łączenie równoległe charakteryzuje się tym, że ten sam sygnał jest
wprowadzany do kilku bloków, a sygna
ły wyjściowe tych bloków są
algebraicznie sumowane.
•
Transmitancja wypadkowa dla dowolnej liczby bloków jest sum
ą
algebraiczn
ą poszczególnych transmitancji.
•
•
G
w =
G
1
+ G
2
+ ... + G
n
G
2
y
G
n
G
1
u
u
u
u
+
+
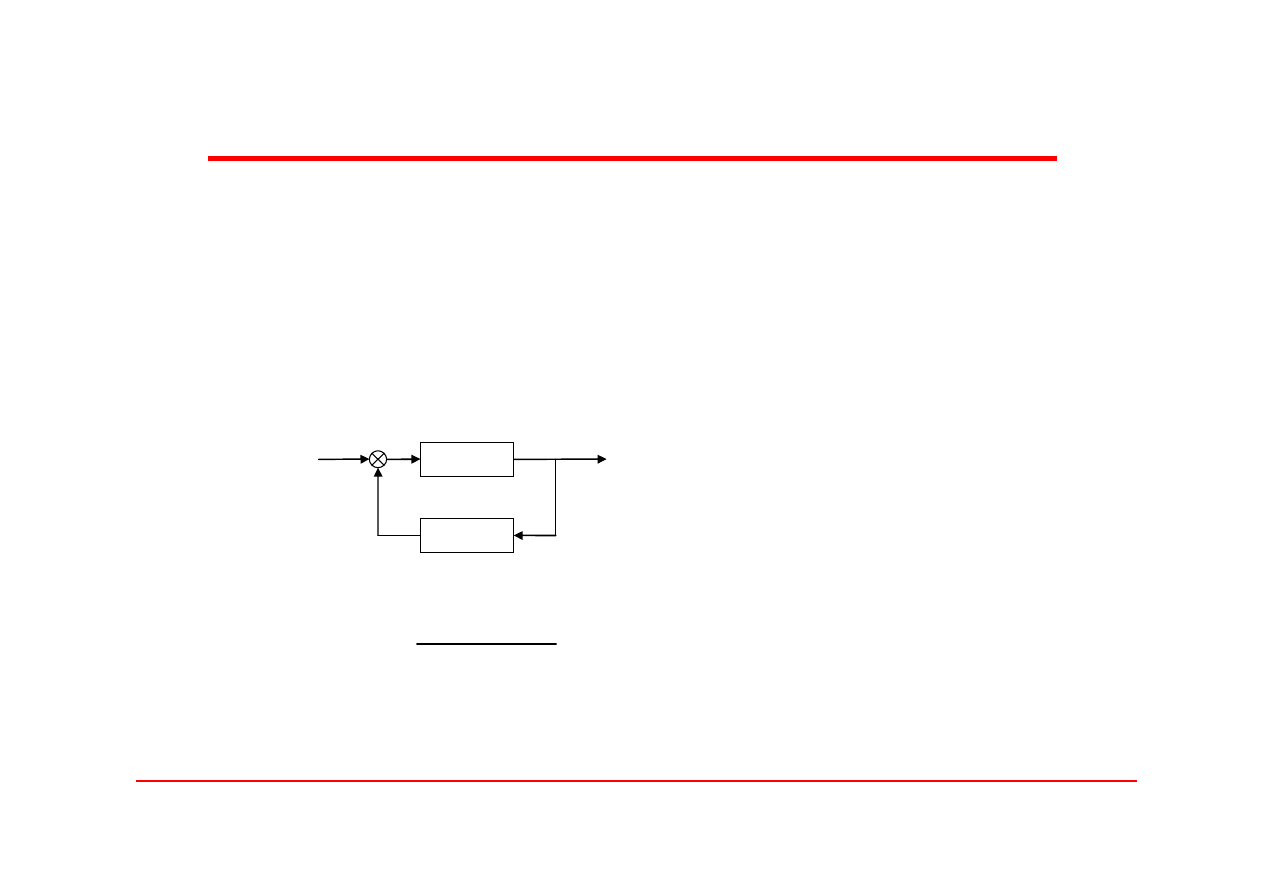
Po
łączenie ze sprzężeniem zwrotnym
Po
łączenie ze sprzężeniem zwrotnym
•
Po
łączenie ze sprzężeniem zwrotnym charakteryzuje się tym, że
sygna
ł wyjściowy układu, bezpośrednio lub za pomocą innego bloku
zostaje wprowadzony na wej
ście tego układu.
•
Je
żeli sygnał wejściowy odejmujemy od sygnału wejściowego do układu
wówczas sprz
ężenie nazywamy ujemnym, jeżeli sygnał ten dodajemy
wówczas sprz
ężenie nazywamy dodatnim.
•
Transmitancj
ę wypadkową opisuje wzór
•
Znak dodatni w mianowniku wyst
ępuje przy sprzężeniu dodatnim, znak
ujemny przy sprz
ężeniu ujemnym.
G
1
G
2
±
y
u
2
1
1
w
G
G
1
G
G
•
±
=
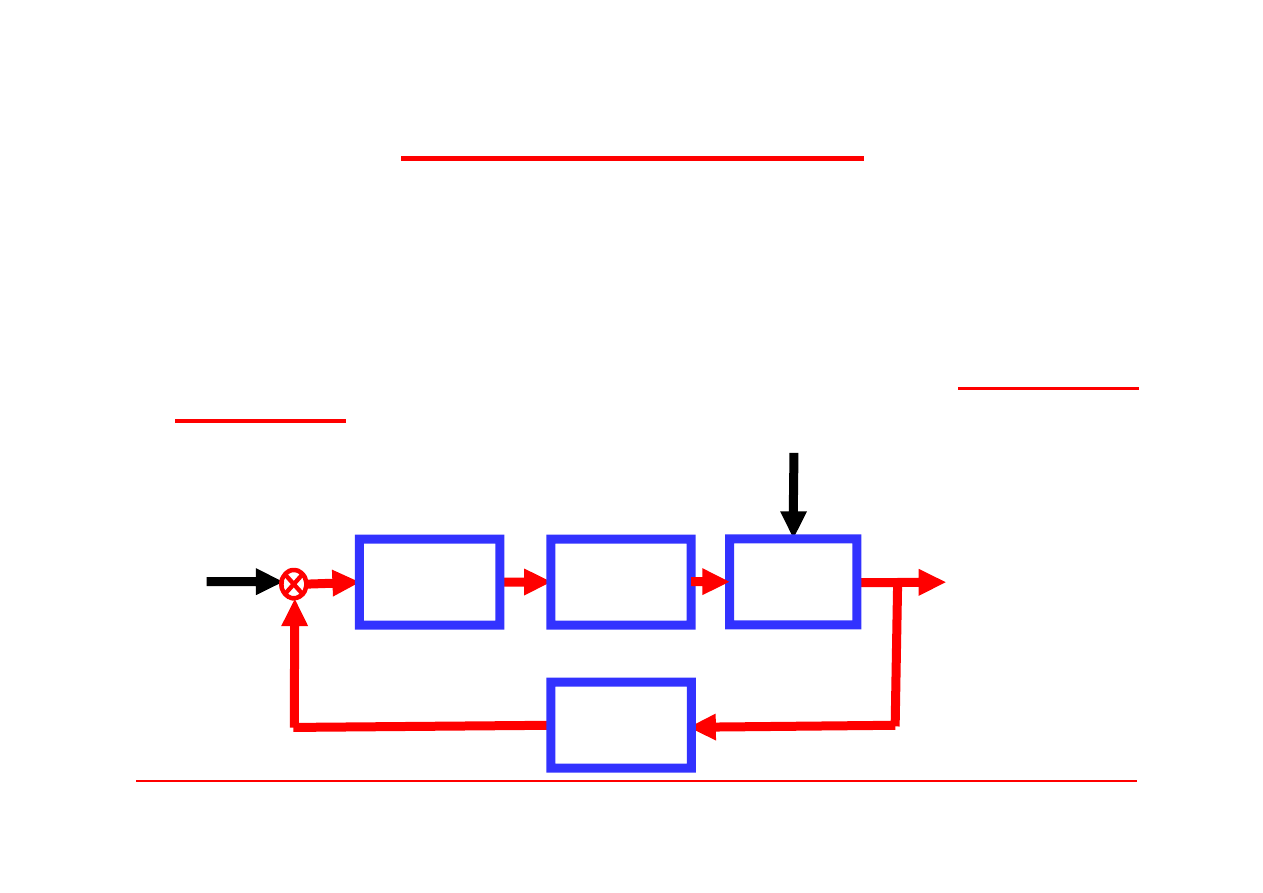
Regulacja
Regulacja -- definicja
definicja
•
Regulacja jest definiowana jako proces, w trakcie którego mierzy si
ę
jak
ąś wielkość fizyczną, nazywaną wielkością regulowaną
y
, porównuje
z warto
ścią innej wielkości nazywanej wielkością zadaną
w
i wp
ływa na
jego przebieg w celu minimalizacji ró
żnicy tych wielkości
e
[DIN 19226].
W procesie regulacji przebieg sygna
łów odbywa się
w obwodzie
zamkni
ętym
, nazywanym uk
ładem automatycznej regulacji.
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
+_
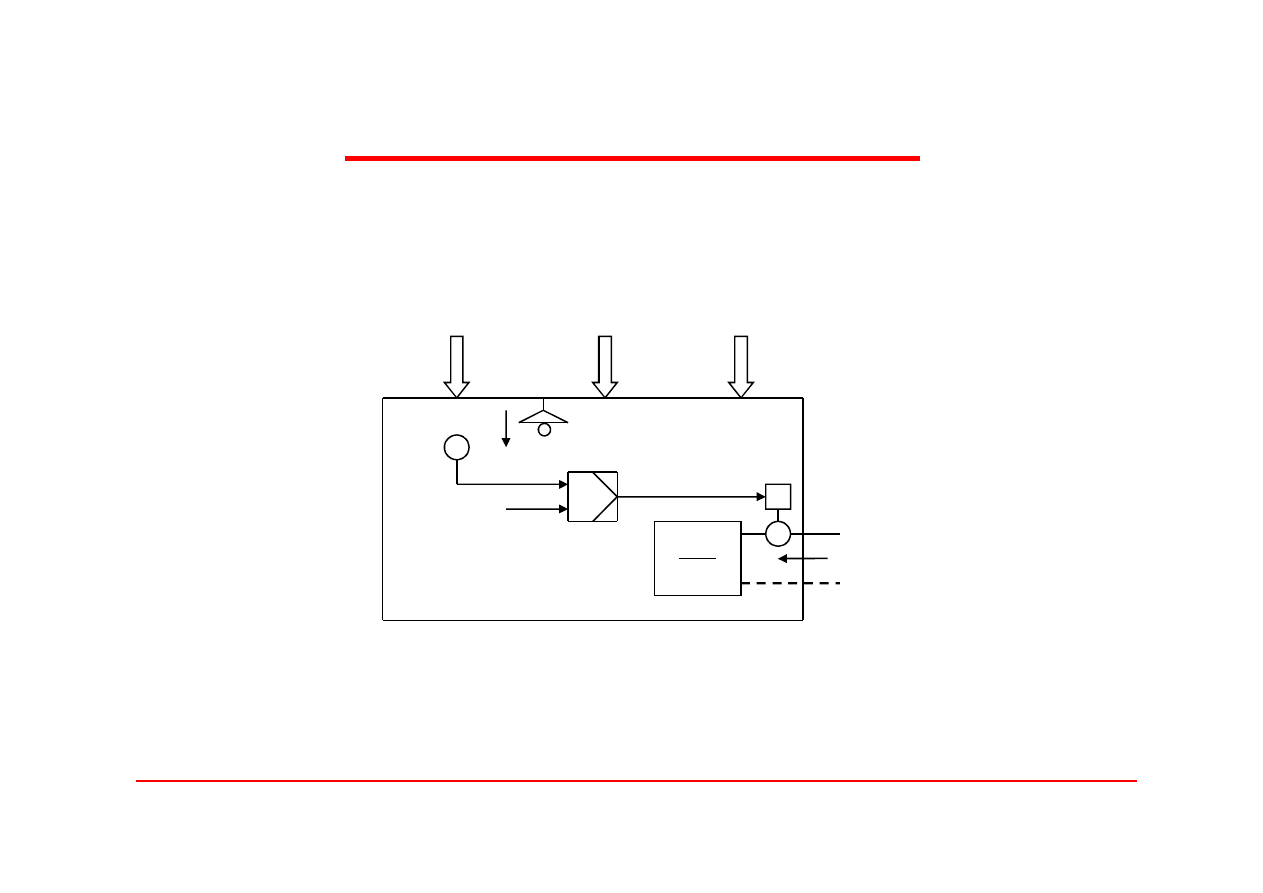
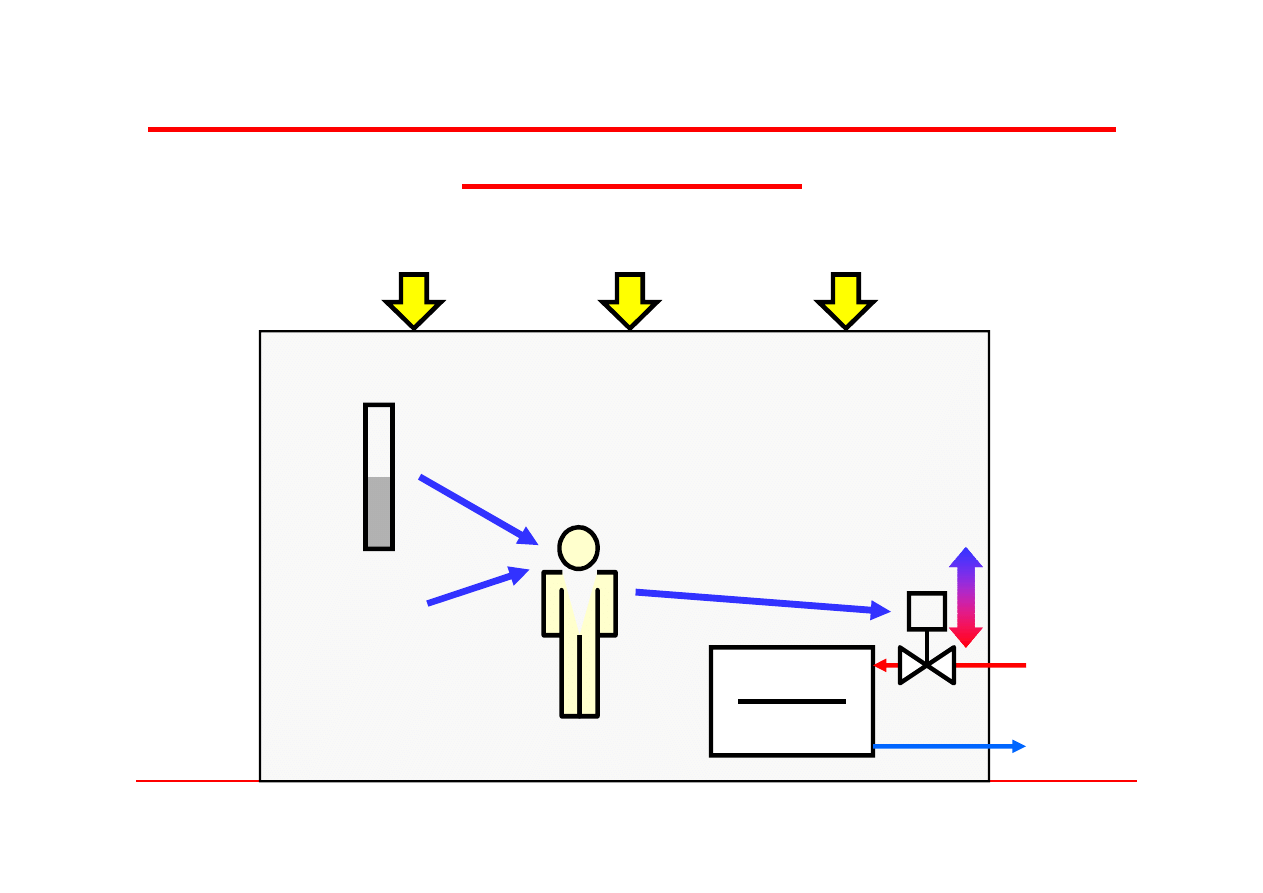
Przyk
ład układu regulacji
Przyk
ład układu regulacji
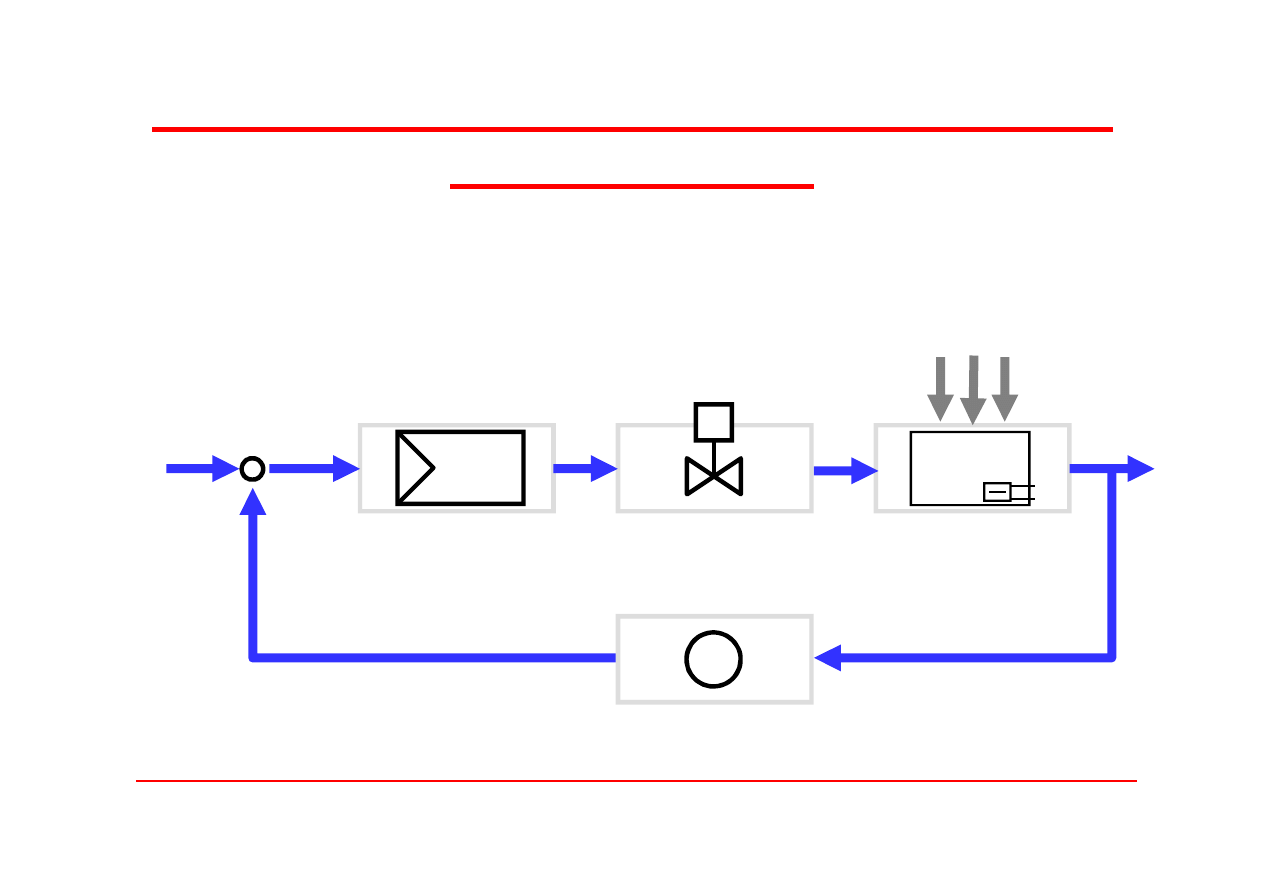
• Schemat
funkcjonalny
uk
ładu
regulacji
temperatury
powietrza w ogrzewanym pomieszczeniu
w
y
T
1
2
u
3
z
1
z
2
z
3
z
5
z
4
1 - regulator, 2 – czujnik temperatury powietrza w pomieszczeniu, 3 - cz
łon wykonawczy, 4 -
obiekt regulacji (pomieszczenie z grzejnikiem), u - wielko
ść nastawna, w - wartość zadana, y -
wielko
ść regulowana, z
1
, z
2
, z
3
, z
4
, z
5
- wielko
ści zakłócające
4
Zak
łócenia zewnętrzne
z
u
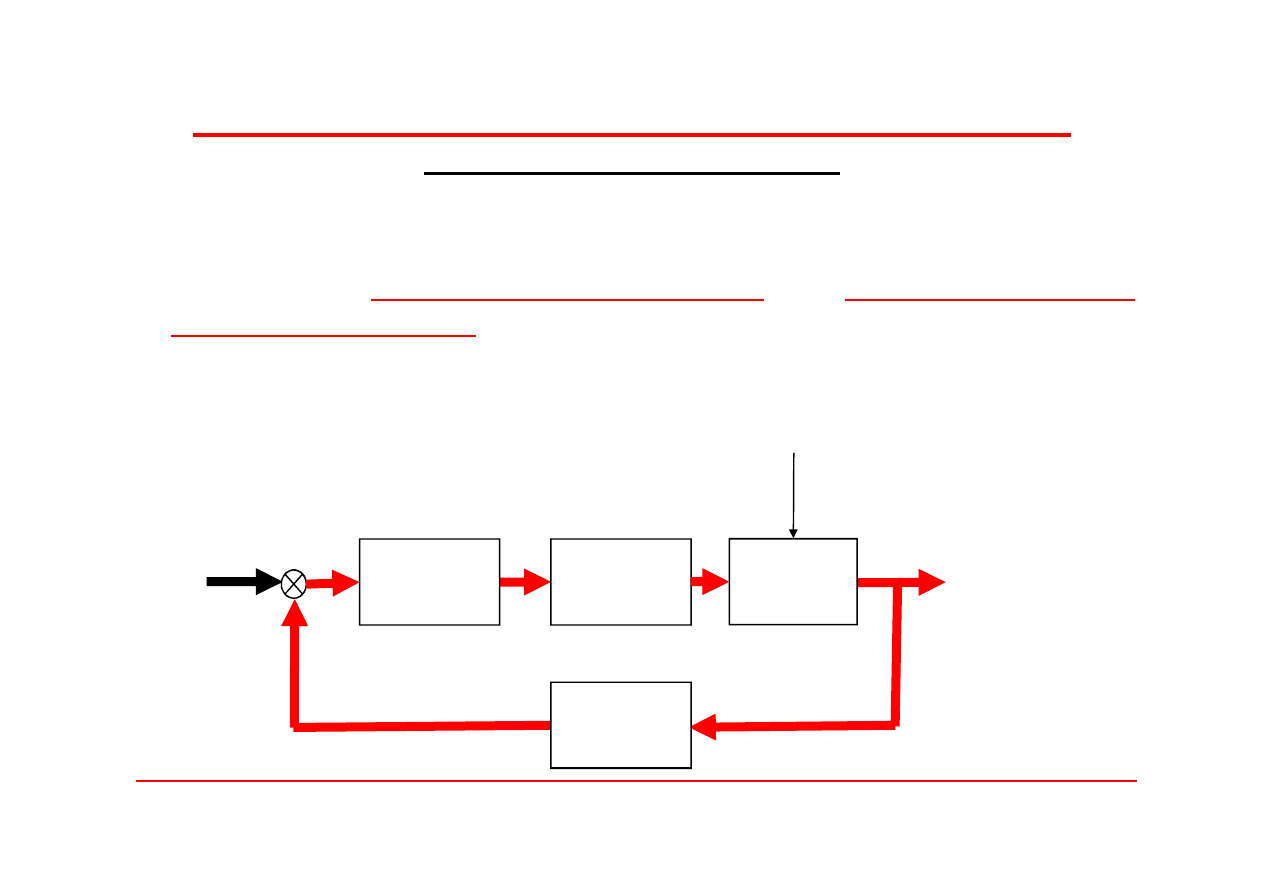
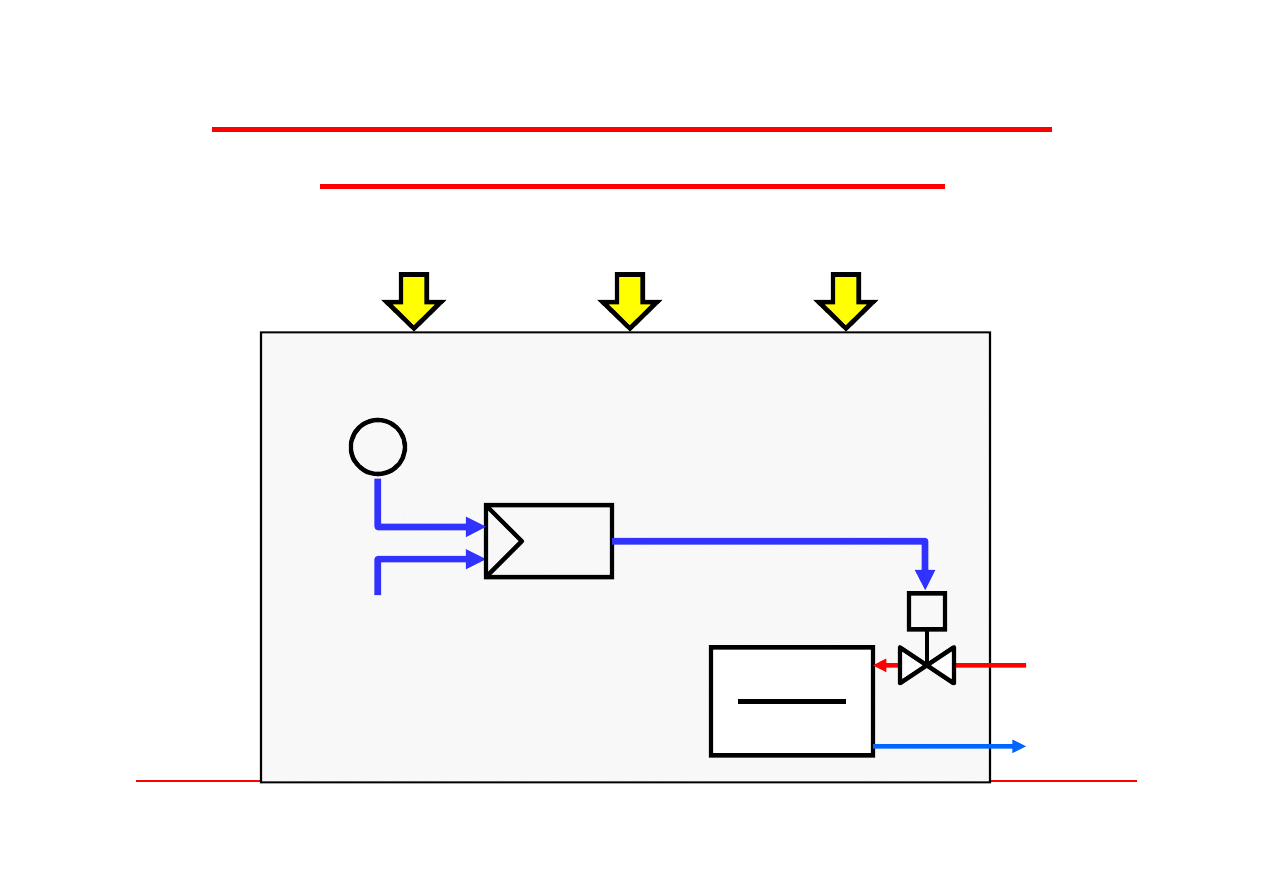
Schemat funkcjonalny
Schemat funkcjonalny –
– schemat blokowy
schemat blokowy
uk
ładu regulacji
uk
ładu regulacji
2
2
3
3
1
1
4
4
1 = REGULATOR
2 = CZUJNIK TEMPERATURY
3 = SI
ŁOWNIK Z ZAWOREM
4 = POMIESZCZENIE Z GRZEJNIKIEM
z = wielko
ści zakłócające
y = wielko
ść regulowana
w = warto
ść zadana
u = wielko
ść nastawna
e = odchy
łka regulacji
w
y
m
T
e
y
Uk
ład regulacji = układ sterowania ze sprzężeniem zwrotnym
Uk
ład regulacji = układ sterowania ze sprzężeniem zwrotnym
((zamkni
ęty układ sterowania
zamkni
ęty układ sterowania))
•
W literaturze z zakresu automatyki uk
ład regulacji jest definiowany
równie
ż jako
zamkni
ęty układ sterowania
lub
uk
ład sterowania ze
sprz
ężeniem zwrotnym.
•
Aby otrzyma
ć zamknięty układ sterowania należy zamknąć pętlę
oddzia
ływań, uzależniając sterowanie od skutków jakie to sterowanie
wywo
łuje.
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
+_
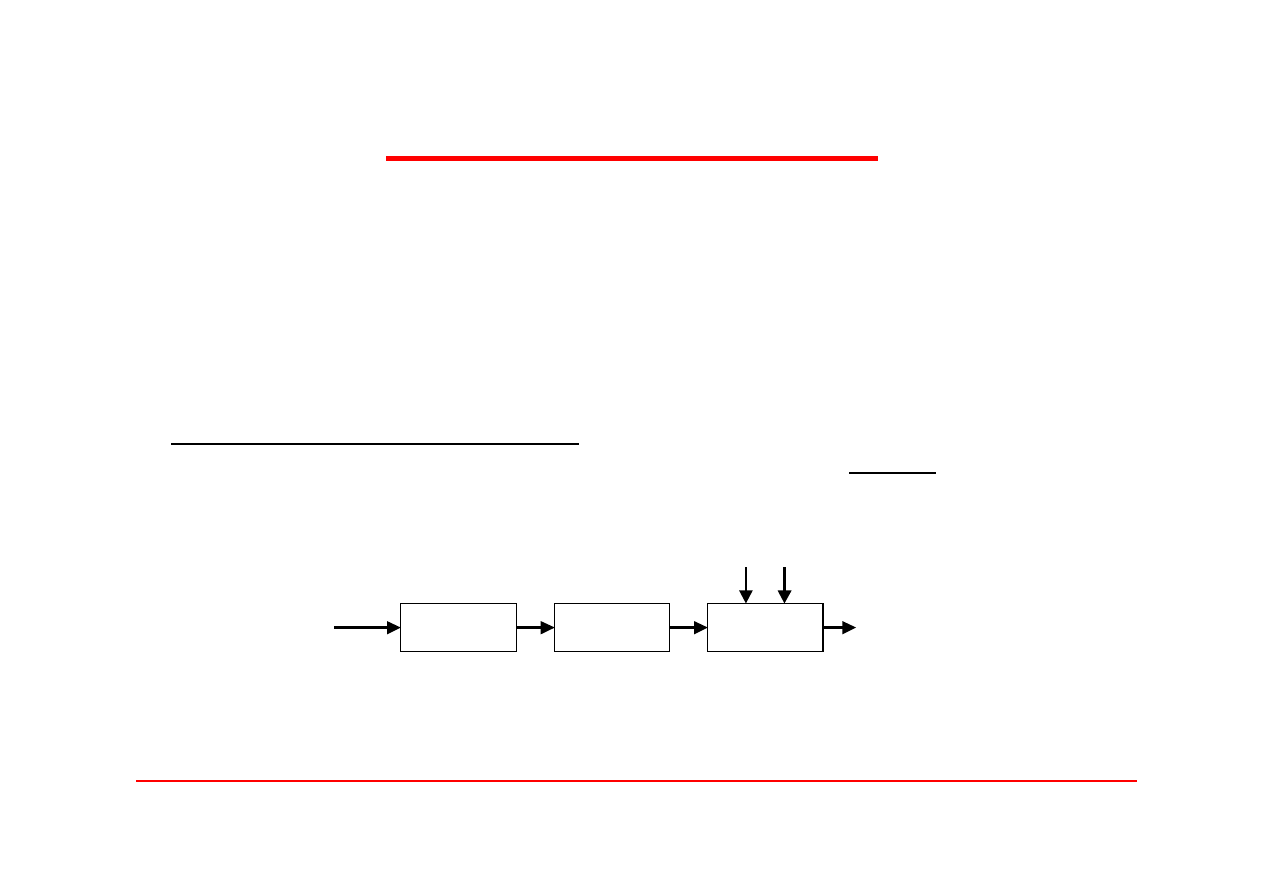
Sterowanie
Sterowanie -- definicja
definicja
•
Sterowanie jest to proces w uk
ładzie, w którym jedna wielkość lub ich
wi
ększa ilość, jako wielkości wejściowe, wpływają na wielkości
wyj
ściowe według prawidłowości właściwej układowi [DIN 19226].
•
Uk
ład sterowania jest układem otwartym, w którym sygnał wyjściowy
nie jest mierzony ani porównywany z sygna
łem wejściowym i nie
wp
ływa na akcję sterowania (brak sprzężenia zwrotnego!).
•
Otwarte uk
łady sterowania stosowane są wówczas, gdy związek
pomi
ędzy sygnałem wejściowym i wyjściowym jest znany.
z
urz
ądzenie
steruj
ące
cz
łon
wykonawczy
obiekt
sterowania
w
u
y
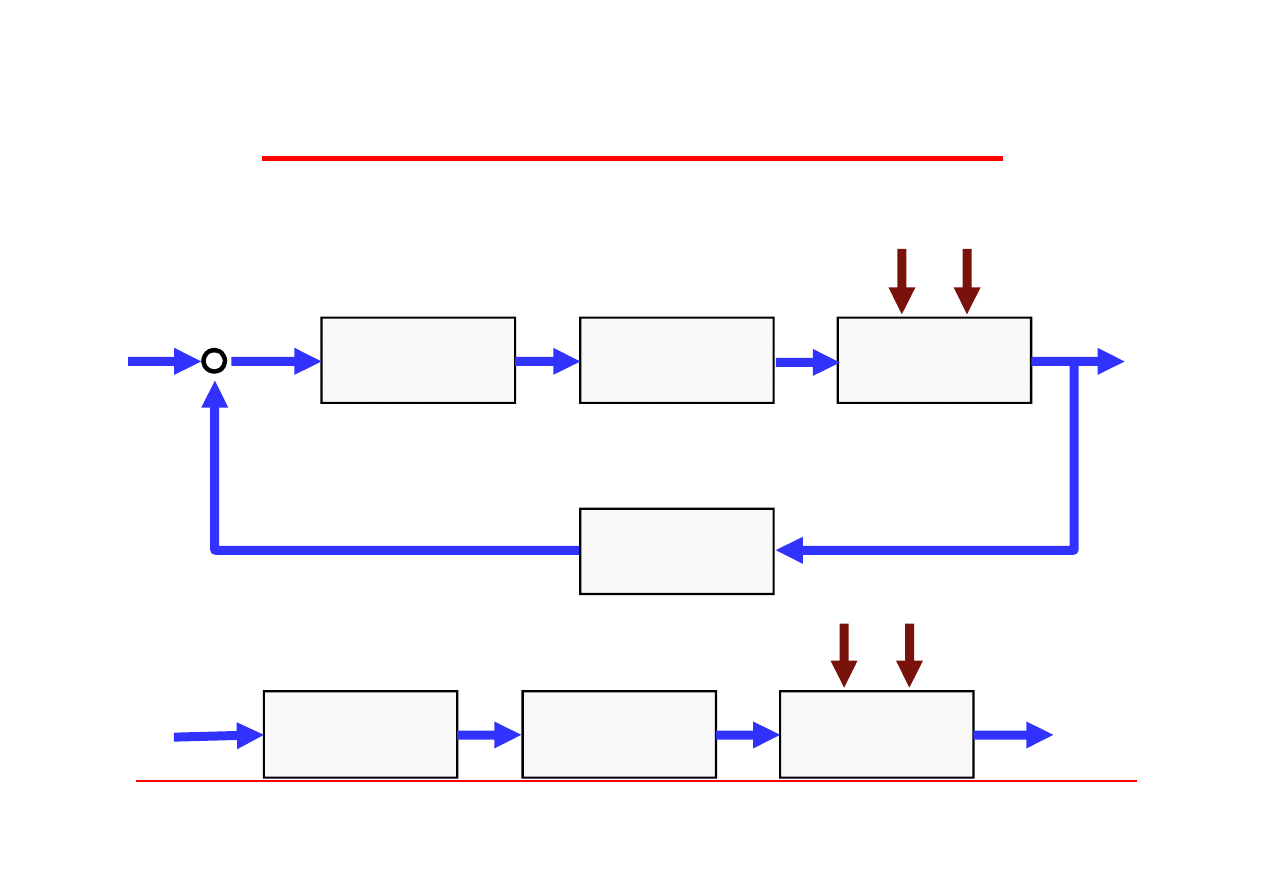
Regulacja i sterowanie. Ró
żnice!
Regulacja i sterowanie. Ró
żnice!
Regulator
Cz
łon
wykonawczy
Obiekt
regulacji
zak
łócenia Z
u
w
y
Cz
łon
pomiarowy
e
Sterownik
Cz
łon
wykonawczy
Obiekt
sterowania
zak
łócenia Z
w
u
y
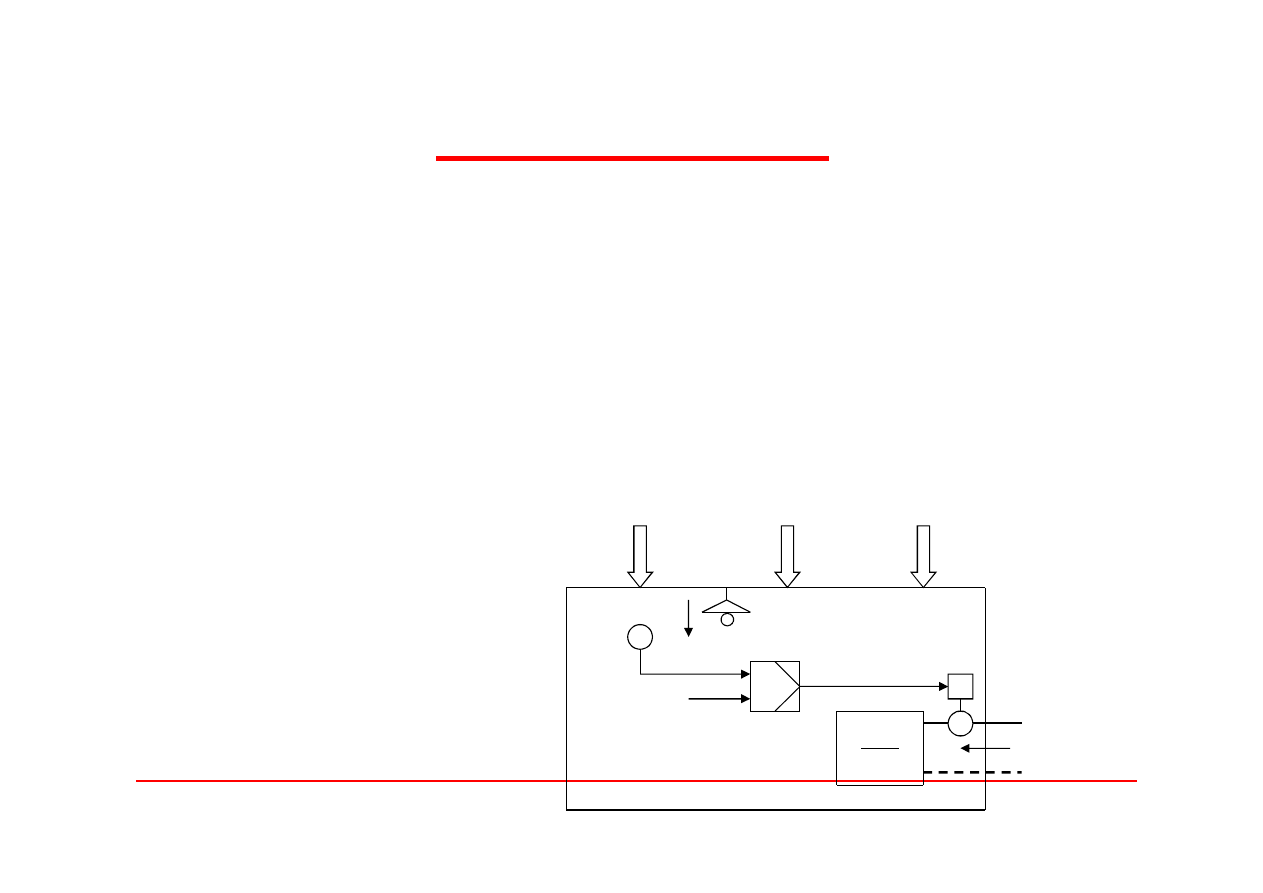
Przyk
ład regulacji i sterowania
Przyk
ład regulacji i sterowania
6
y’→ t
i
w
T
2
1
u
3
4
5
y
y
m
Schemat funkcjonalny układu aut. reg. i sterowania
regulator
(1)
obiekt
regulacji
(3,4,5)
element
pomiarowy
(2)
obiekt
sterowania
(6)
y
u
e
w
y
m
y
z
2
z
1
t
zco
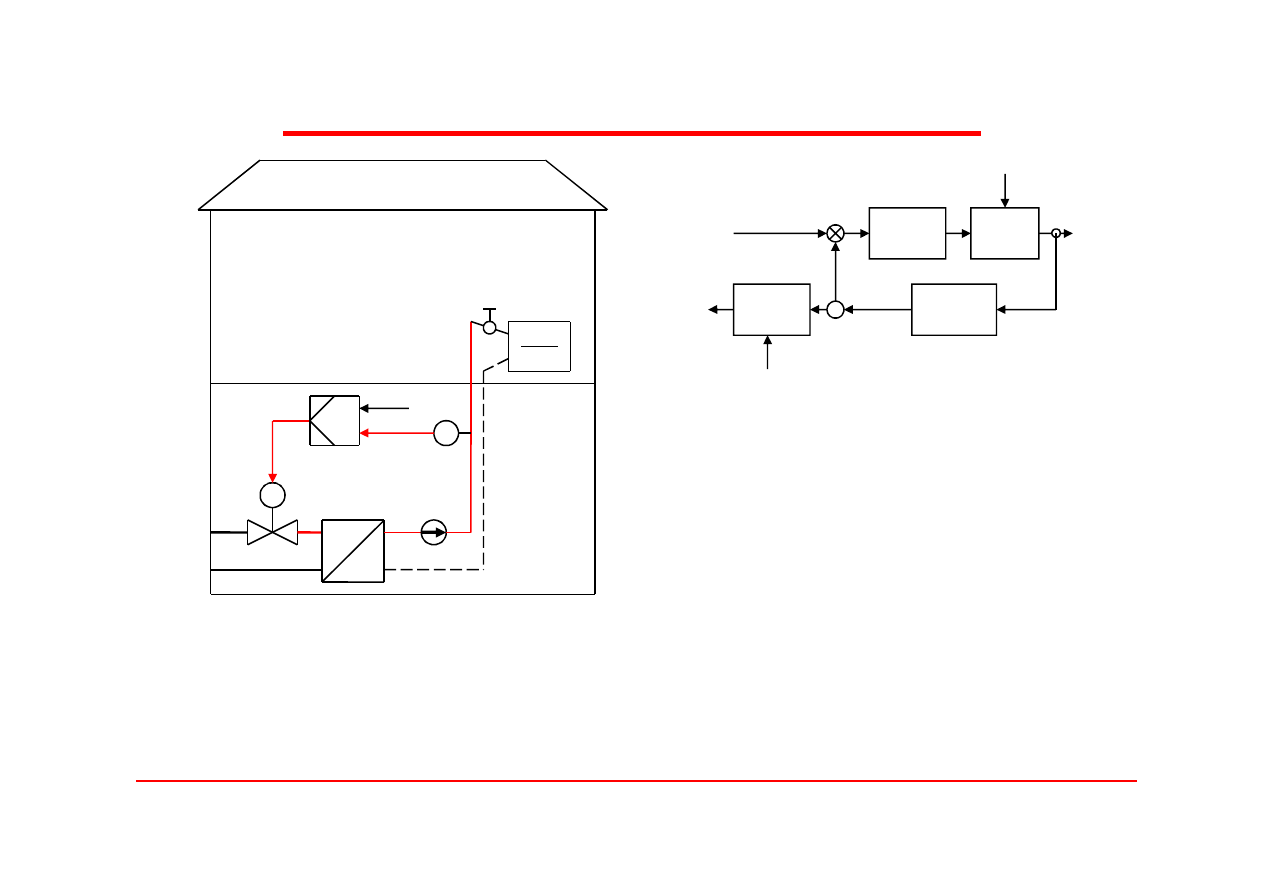
Sterowanie temperatur
ą powietrza w pomieszczeniu i regulacja temperatury wody zasilającej grzejnik:
1 - regulator, 2 – czujnik temperatury wody, 3 – zawór regulacyjny z si
łownikiem, 4 - wymiennik ciepła, 5
- pompa obiegowa, 6 – grzejnik w ogrzewanym pomieszczeniu, w – warto
ść zadana, u – sygnał
nastawiaj
ący, y- wielkość regulowana, y
m
– zmierzona warto
ść wielkości regulowanej, y’ – wielkość
sterowana, z
1,
z
2
– zak
łócenia
Schemat blokowy układu regulacji i sterowania
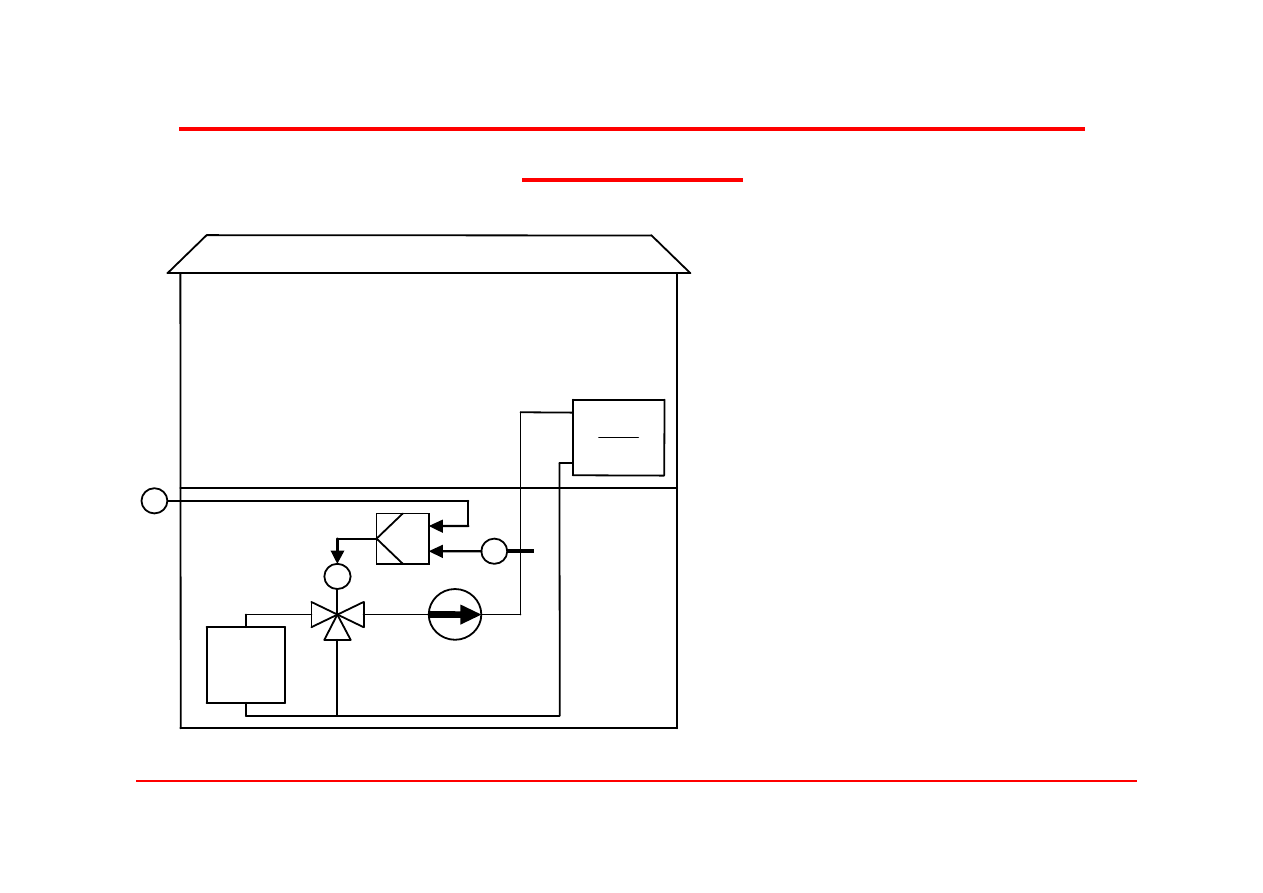
Regulacja pogodowa jako przyk
ład regulacji i
Regulacja pogodowa jako przyk
ład regulacji i
sterowania
sterowania
7
3
u
2
4
T
5
t
zco
y
m
y
w
T
1
6
y' = t
w
t
zco
-
wielko
ść regulowana
t
w
-
wielko
ść sterowana
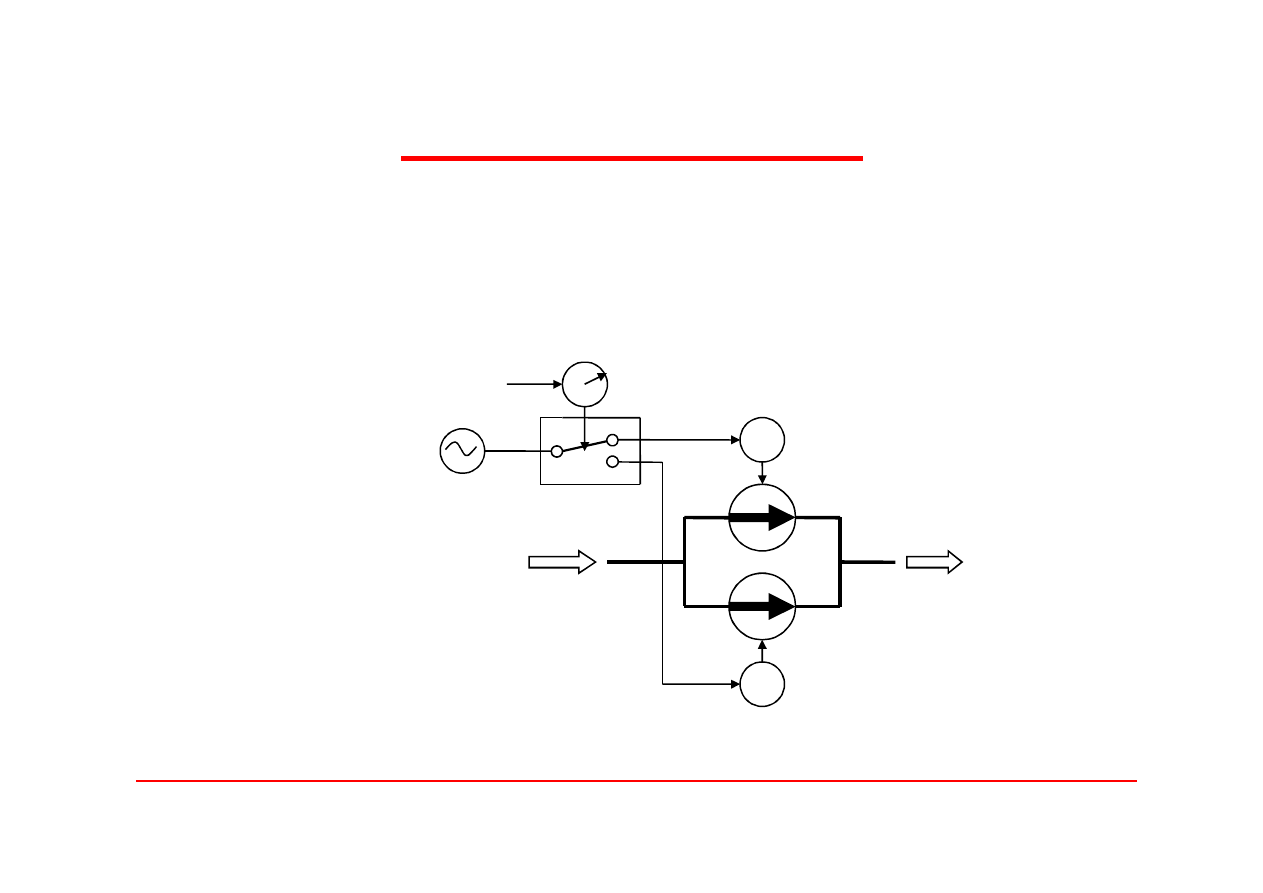
Przyk
ład sterowania
Przyk
ład sterowania
Sterowanie czasowe (programowe) prze
łączaniem równolegle
po
łączonych pomp
M
M
w
u
1
u
2
y
1
y
2
Zegar sterujący
P
1
P
2

Rodzaje regulacji
Rodzaje regulacji
Rodzaje regulacji
• R
ęczna
• Automatyczna
Ró
żnice w regulacji ręcznej i automatycznej.
Przyk
ład:
- termostat grzejnikowy – regulacja
automatyczna (r
ęczne nastawianie wielkości
regulowanej?),
- zawór grzejnikowy – regulacja r
ęczna.
30
+ 20°C
°C
24
22
20
18
16
Z
1
Z
2
Z
3
1
1
2
2
3
3
4
4
R
ęczna regulacja temperatury powietrza w
R
ęczna regulacja temperatury powietrza w
pomieszczeniu
pomieszczeniu
31
2
2
3
3
T
1
1
w
y
u
4
4
Automatyczna regulacja temperatury
Automatyczna regulacja temperatury
powietrza w pomieszczeniu
powietrza w pomieszczeniu
Z
1
Z
2
Z
3
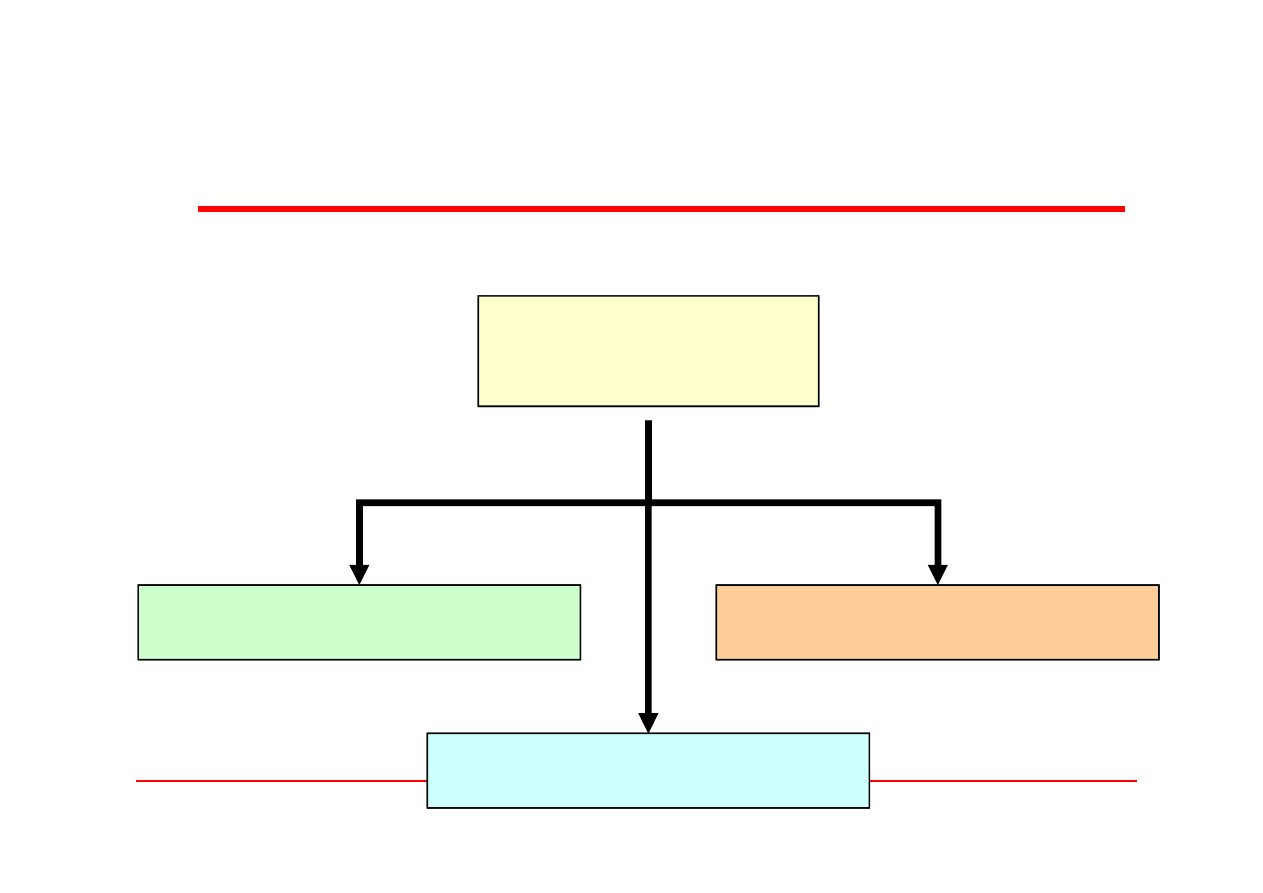
Rodzaje regulacji automatycznej
Rodzaje regulacji automatycznej
AUTOMATYCZNA
REGULACJA
STAŁOWARTOŚCIOWA
NADĄŻNA
PROGRAMOWA
Rodzaje regulacji
Rodzaje regulacji
• Regulacja sta
łowartościowa polega na utrzymaniu stałej
warto
ści wielkości regulowanej. Wartość zadana pozostaje
na sta
łym poziomie niezależnie od zakłóceń działających na
uk
ład (jest zdeterminowana w = const). Działanie układu
regulacji automatycznej prowadzi do eliminowania wp
ływu
zak
łóceń na wielkość regulowaną.
• Jest to najcz
ęściej stosowany rodzaj regulacji: np. regulacja
temp. w pomieszczeniu
w
y
T
1
2
u
3
z
1
z
2
z
3
z
5
z
4
Regulacja sta
łowartościowa
Regulacja sta
łowartościowa
• Regulacja temperatury powietrza nawiewanego.
+
T
w
y
m
u
y
1
2
3
4
5
z
1
z
2
Regulacja sta
łowartościowa temperatury powietrza w
Regulacja sta
łowartościowa temperatury powietrza w
pomieszczeniu
pomieszczeniu –
– kocio
ł jako człon wykonawczy.
kocio
ł jako człon wykonawczy.
T
pomieszczenie
czujnik temperatury
kocioł
regulator
y
w
Człon
wykonawczy
Obiekt
regulacji
Człon
pomiarowy
w
Przyk
ład regulacji stałowartościowej
Przyk
ład regulacji stałowartościowej
• Regulacja poziomu wody w zasobniku
z
1
P
1
u
2
1
w
y
4
3
z
2
V
2
h
Przyk
ład regulacji stałowartościowej
Przyk
ład regulacji stałowartościowej
• Regulacja temperatury wody w zasobniku
(podgrzewaczu pojemno
ściowym).
Regulacja programowa
Regulacja programowa
• Regulacja programowa utrzymuje
zmienn
ą w czasie
warto
ść
wielko
ści
regulowanej
zgodnie
z
zadanym
programem zmiany warto
ści zadanej (w = w(t)). Typowym
przyk
ładem regulacji programowej w systemach ogrzewania
pomieszcze
ń
jest
okresowe
obni
żanie
temperatury
powietrza do poziomu temperatury dy
żurnej w godzinach
nocnych lub w dni wolne od pracy.
Regulacja programowa
Regulacja programowa
t
i
°C
czas
0:00
7:00
17:00
24:00
+20
+15
DZIEŃ
normalna praca
instalacji
ogrzewania
NOC
praca instalacji
ogrzewania
z osłabieniem
NOC
praca instalacji
ogrzewania
z osłabieniem
Regulacja sta
łowartościowa sekwencyjna
Regulacja sta
łowartościowa sekwencyjna
• Regulacja
sta
łowartościowa
sekwencyjna
stosowana jest w przypadku gdy dla utrzymania
sta
łej wartości wielkości regulowanej konieczna jest
wspó
łpraca regulatora z dwoma lub więcej
elementami wykonawczymi.
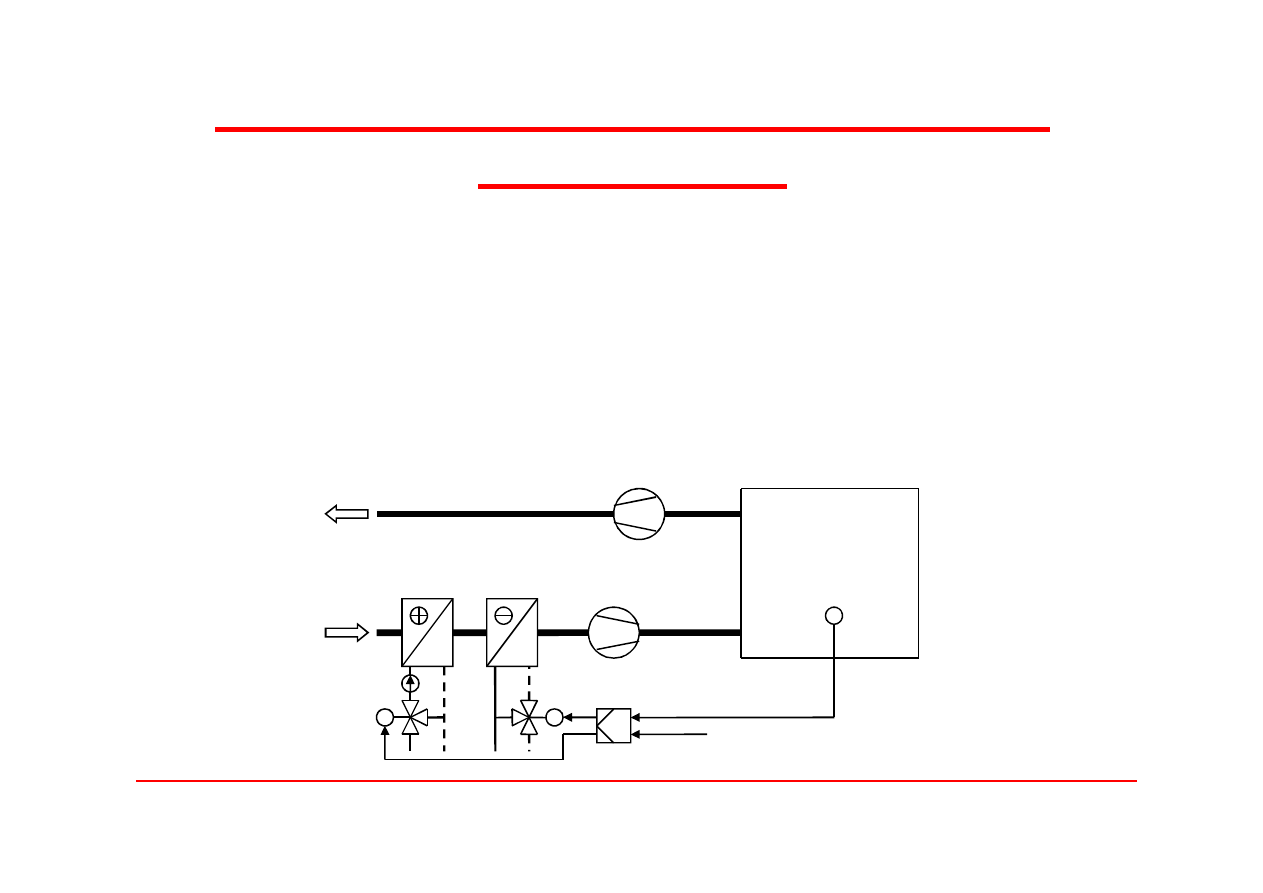
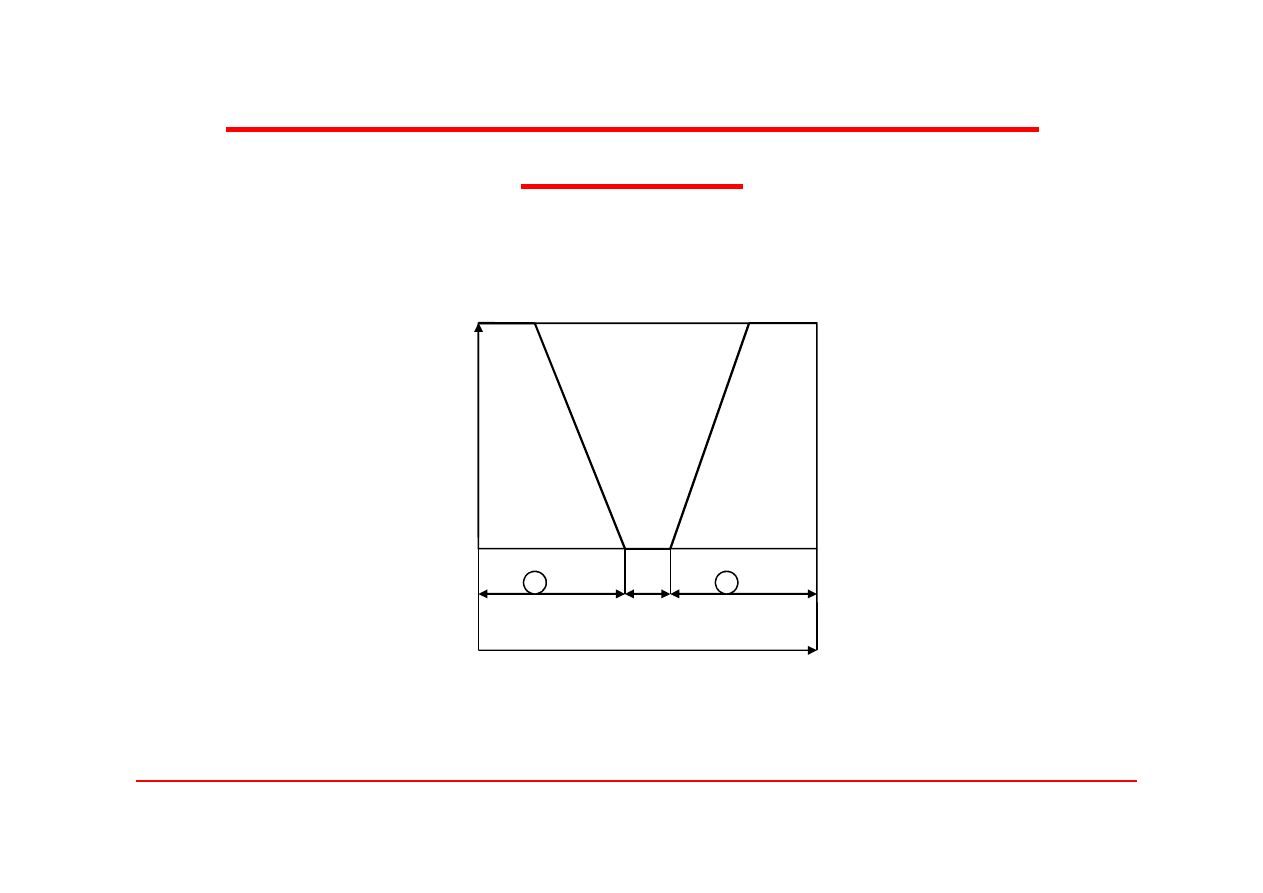
Przyk
ład regulacji stałowartościowej
Przyk
ład regulacji stałowartościowej
sekwencyjnej
sekwencyjnej
•
Uk
ład regulacji temperatury powietrza w wentylowanym pomieszczeniu.
•
Regulator
w
zale
żności od wartości temperatury powietrza w
pomieszczeniu wysy
ła sygnał nastawiający do siłownika nagrzewnicy
lub do si
łownika chłodnicy.
•
Za
łączanie tych sygnałów odbywa się sekwencyjnie
T
y
w
u
ch
u
g
y=t
i
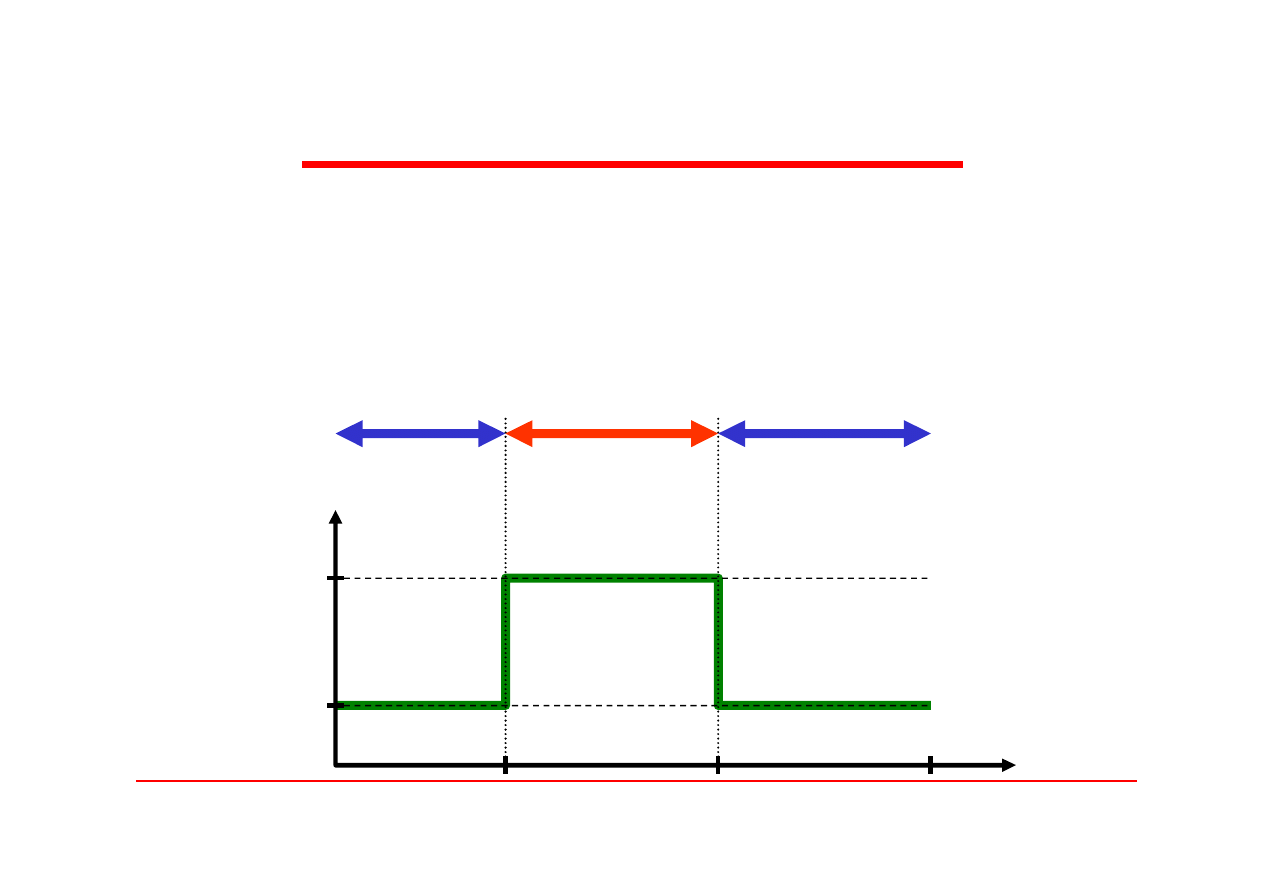
Sekwencyjna regulacja temperatury
Sekwencyjna regulacja temperatury
powietrza
powietrza
• Wykres przebiegu sygna
łu sterującego
+
-
Strefa martwa
t
i
0
100%
u
g
u
ch
u
Regulacja nad
ążna
Regulacja nad
ążna
• Regulacja nad
ążna ma za zadanie nadążne korygowanie
warto
ści wielkości regulowanej
stosownie do aktualnej
warto
ści
zadanej,
która
zmienia
si
ę
w
sposób
niezdeterminowany, tzn. trudny do przewidzenia (w = w(?))
• W ogrzewaniach wodnych temperatura czynnika grzejnego
zasilaj
ącego instalację wewnętrzną t
zco
(jako wielko
ść
regulowana y) w procesie regulacji nad
ąża za zmianami
temperatury powietrza zewn
ętrznego t
zew
(warto
ścią zadaną
w)
• Regulacja
ta
uwzgl
ędnia wpływ parametrów klimatu
zewn
ętrznego
potocznie
jest
nazywana
regulacj
ą
pogodow
ą lub kompensacyjną.
Regulacja nad
ążna (pogodowa?)
Regulacja nad
ążna (pogodowa?)
7
3
u
2
4
T
5
t
zco
y
m
y
w
T
1
6
y' = t
w
Wykres regulacji jako
ściowej
Wykres regulacji jako
ściowej c.o
c.o..
t
zco
[°C]
0
90
50
- 20
-10
0
10
10
20
30
40
60
70
80
t
zco
=f(t
zew
)
t
zew
[°C]
Regulacja nad
ążna kaskadowa
Regulacja nad
ążna kaskadowa
• Regulacja
nad
ążna kaskadowa stosowana jest do
regulacji temperatury w systemach wentylacji i klimatyzacji
w
celu
uzyskania
wysokiej
jako
ści regulacji poprzez
kompensacj
ę własności dynamicznych obiektu regulacji.
• W procesie regulacji zak
łada się kaskadowe działanie dwu
regulatorów,
regulatora
g
łównego
(wiod
ącego)
oraz
regulatora pomocniczego (nad
ążnego).
• Obydwa regulatory w regulatorach cyfrowych mog
ą być
zaprogramowane w jednym urz
ądzeniu.
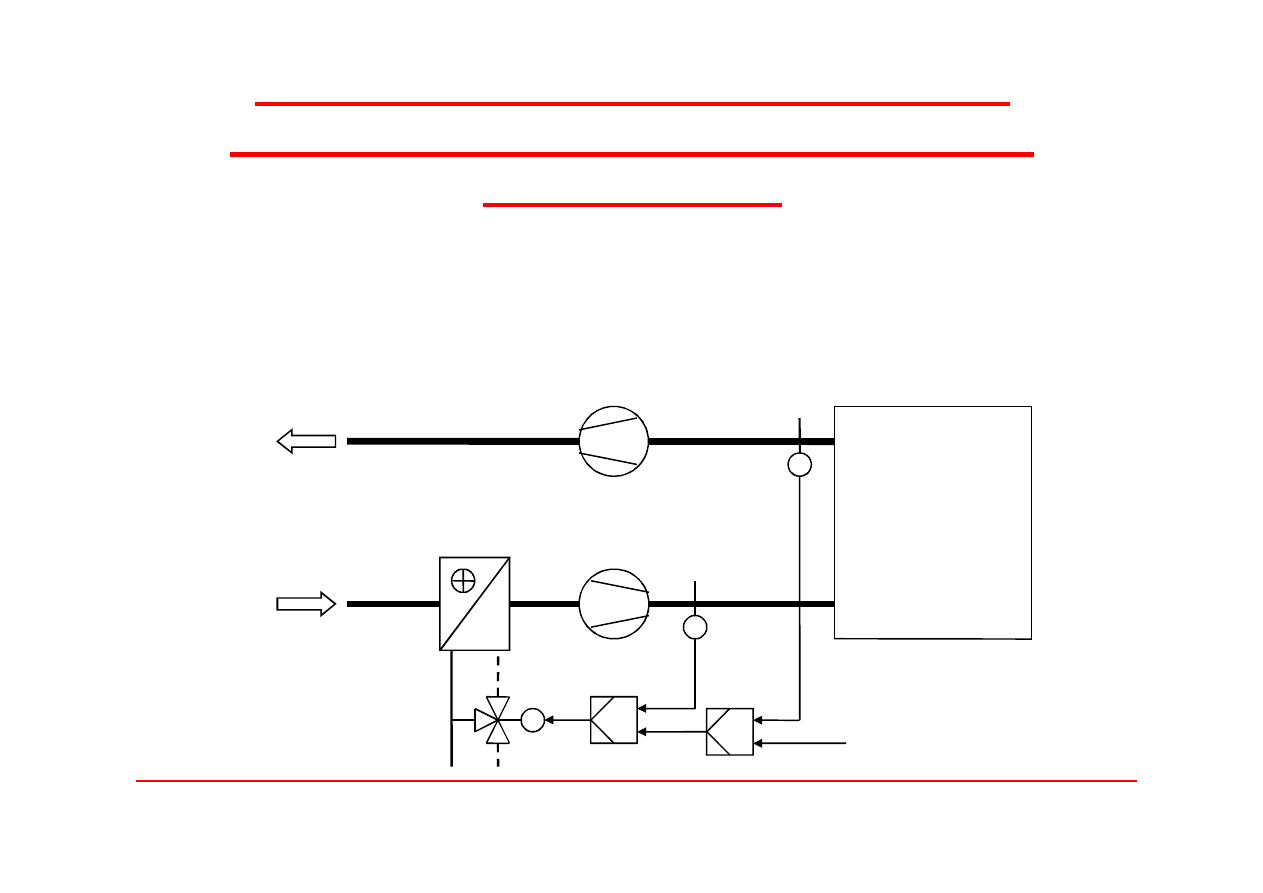
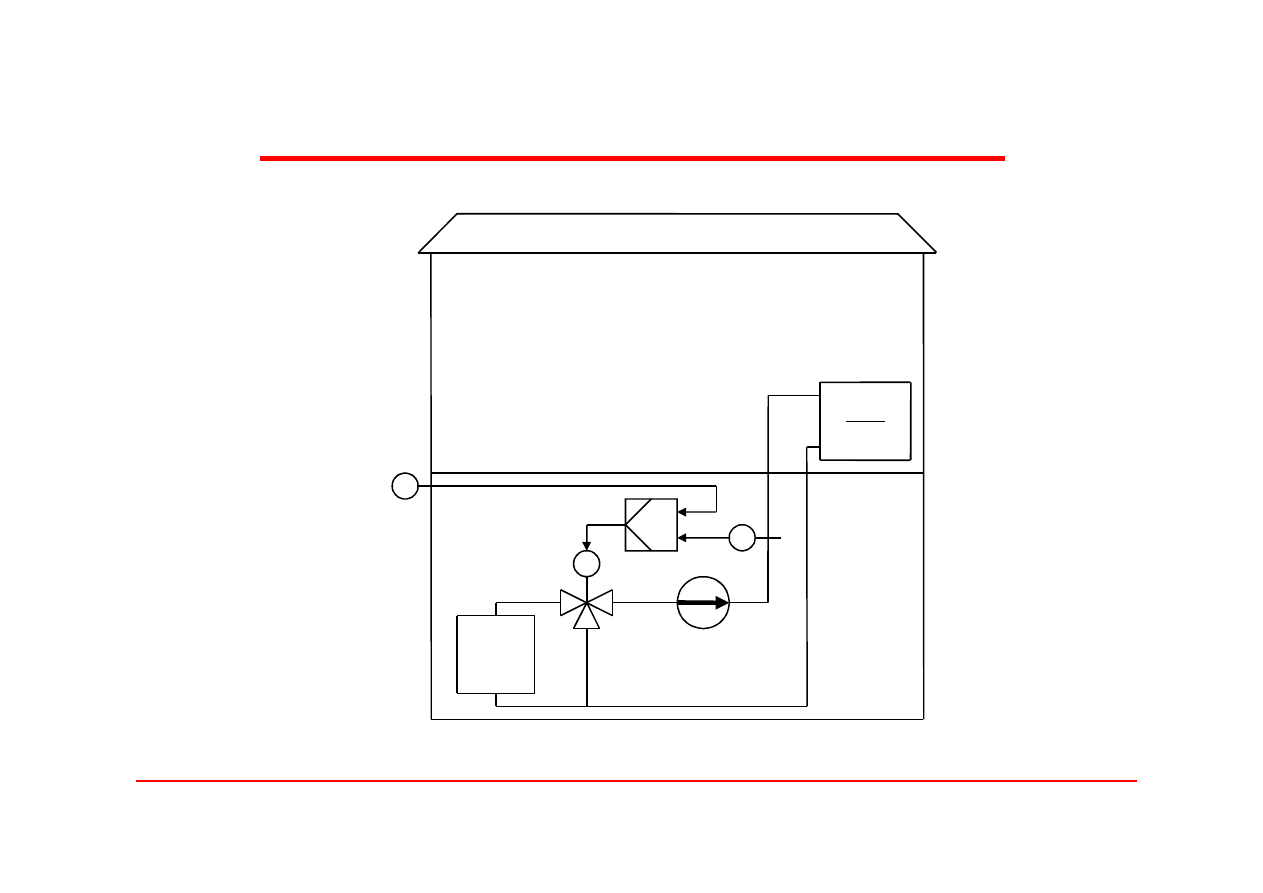
Schemat uk
ładu kaskadowej regulacji
Schemat uk
ładu kaskadowej regulacji
temperatury powietrza w pomieszczeniu
temperatury powietrza w pomieszczeniu
wentylowanym
wentylowanym
•
Temperatura powietrza nawiewanego t
N
(jako wielko
ść pomocnicza y
1
)
utrzymywana jest przez regulator 1 na poziomie zadawanym przez
regulator 2 nad
ążnie za aktualną wartością temperatury powietrza
wywiewanego t
W
(g
łówna wielkość regulowana y
2
).
T
T
1
y
1
w=t
i
u
1
t
i
t
W
t
N
2
y
2
u
2
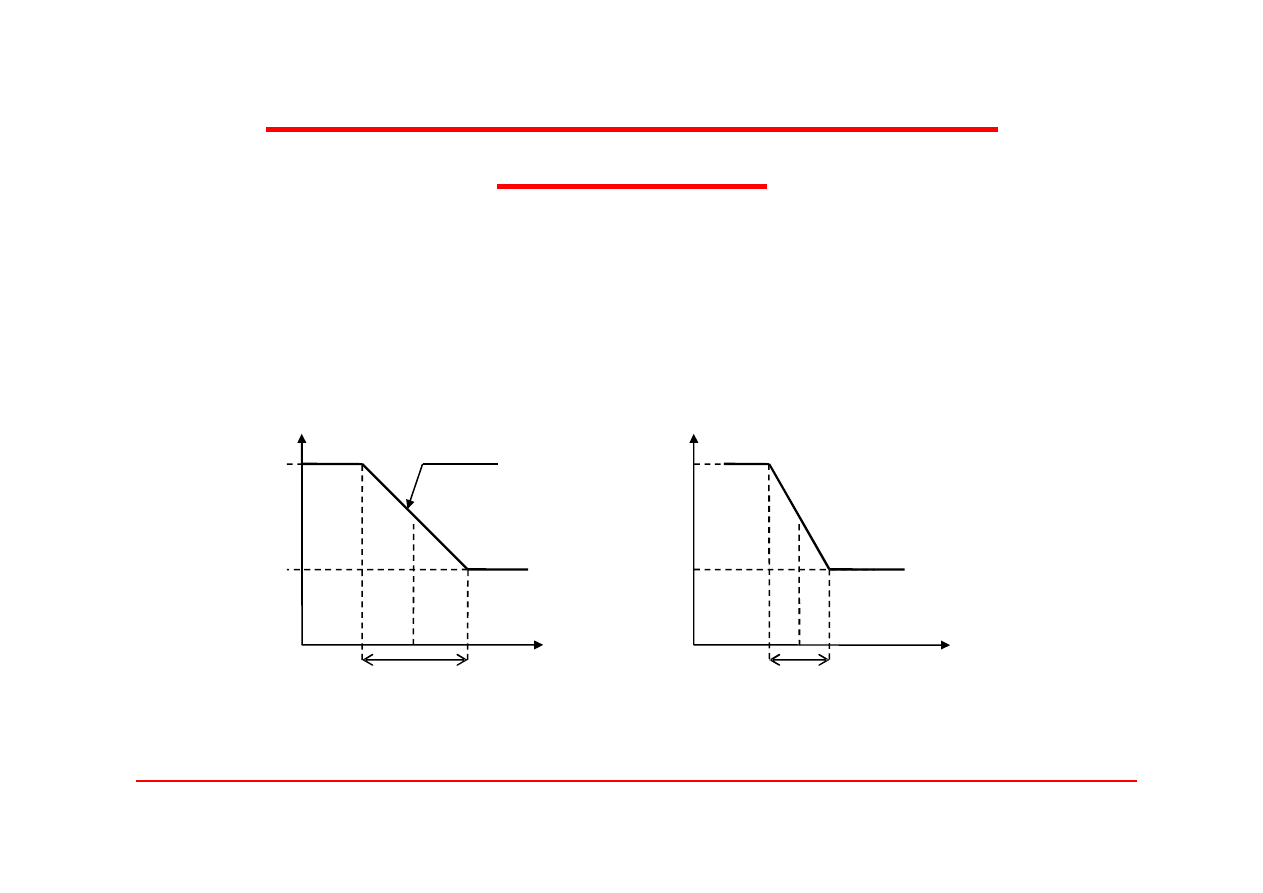
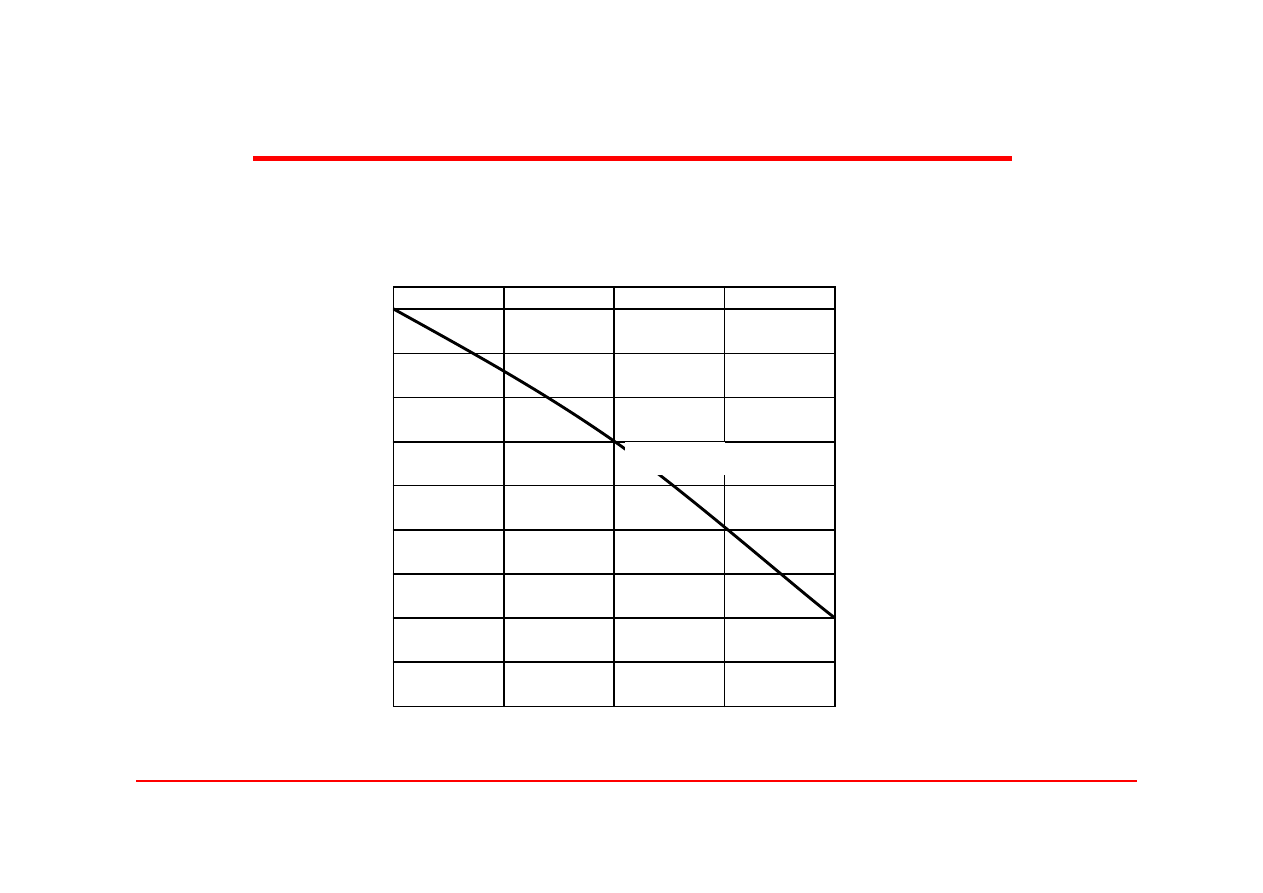
Przyk
ład zastosowania regulacji
Przyk
ład zastosowania regulacji
kaskadowej
kaskadowej
• Wykres zale
żności temperatury powietrza nawiewanego od
temperatury powietrza wywiewanego stosowany w uk
ładach
regulacji kaskadowej
t
W
[°C]
t
N
[°C]
30
t
N max
t
i
12
-Δt
+Δt
t
N min
a
b
-1K t
i
+1K
t
N max
t
N min
t
N
t
W
t
N
=f(±Δt)
Regulacja kaskadowa
Regulacja kaskadowa
• Regulacja kaskadowa korzystna jest szczególnie
wówczas gdy w
łasności dynamiczne obu obwodów
regulacji ró
żnią się znacznie między sobą. Dzięki
ma
łej inercyjności pierwszego obiektu regulacji
(nagrzewnica powietrza) mimo du
żej bezwładności
cieplnej
g
łównego
obiektu
regulacji
(pomieszczenie wraz z instalacj
ą wentylacyjną)
stosuj
ąc regulację kaskadową można znacznie
poprawi
ć własności dynamiczne układu regulacji i
uzyska
ć wysoką jakość regulacji.
KONIEC
KONIEC
Podstawy automatyki
Podstawy automatyki
Wyk
ład 2
Wyk
ład 2
Jan Syposz
Obiekty regulacji
Obiekty regulacji
Uk
ład regulacji
Uk
ład regulacji
Obiekt w uk
ładzie regulacji
obiekt regulacji
w
e
u
y
y
y
m
z
regulator
urz
ądzenie
wykonawcze
obiekt
regulacji
element
pomiarowy
_
Obiekt regulacji
Obiekt regulacji
Obiektem regulacji mo
że być urządzenie, zespół urządzeń
lub
proces
technologiczny,
w
którym
w
wyniku
zewn
ętrznych oddziaływań realizuje się pożądany algorytm
dzia
łania.
Na obiekt regulacji oddzia
łują:
-
zmienne wej
ściowe
nazywane sygna
łami nastawiającymi
u
,
-
zmienne szkodliwe
nazywane sygna
łami zakłócającymi
z
,
Na
wyj
ściu z obiektu regulacji otrzymujemy sygnały
wyj
ściowe nazywane:
zmiennymi regulowanymi y
.
Obiekty regulacji
Obiekty regulacji
Do prawid
łowego zaprojektowania układu regulacji
niezb
ędna jest znajomość właściwości obiektów
regulacji,
to
znaczy
zale
żności
pomi
ędzy
wielko
ściami wejściowymi i wyjściowymi.
Stany ustalone
, w których wielko
ści te pozostają
niezmienne
w
czasie
okre
śla
si
ę
charakterystykami statycznymi,
Stany nieustalone
(wielko
ści zmienne w czasie)
opisywane
s
ą
przy
pomocy
charakterystyk
dynamicznych.
Charakterystyki te
(statyczne i dynamiczne)
mo
żna
wyznaczy
ć analitycznie lub doświadczalnie.
Metody wyznaczania charakterystyk
Metody wyznaczania charakterystyk
statycznych
statycznych
• Metoda analityczna polega na graficznym przedstawieniu
zale
żności między sygnałem wejściowym i wyjściowym
y =
f(x),
przy wykorzystaniu matematycznego opisu procesów
fizycznych zachodz
ących w obiekcie.
• Metoda do
świadczalna polega na wprowadzaniu do
rzeczywistego uk
ładu kolejnych, niezmiennych w czasie,
warto
ści sygnału wejściowego
x
1
do
x
n
oraz pomiarze
odpowiadaj
ących im wartości sygnału na wyjściu
y
1
do
y
n
.
Po
uzyskaniu odpowiedniej ilo
ści par
(x,y)
nanosi si
ę je na
wykres wspó
łrzędnych, aproksymuje otrzymując w ten
sposób charakterystyk
ę statyczną obiektu.
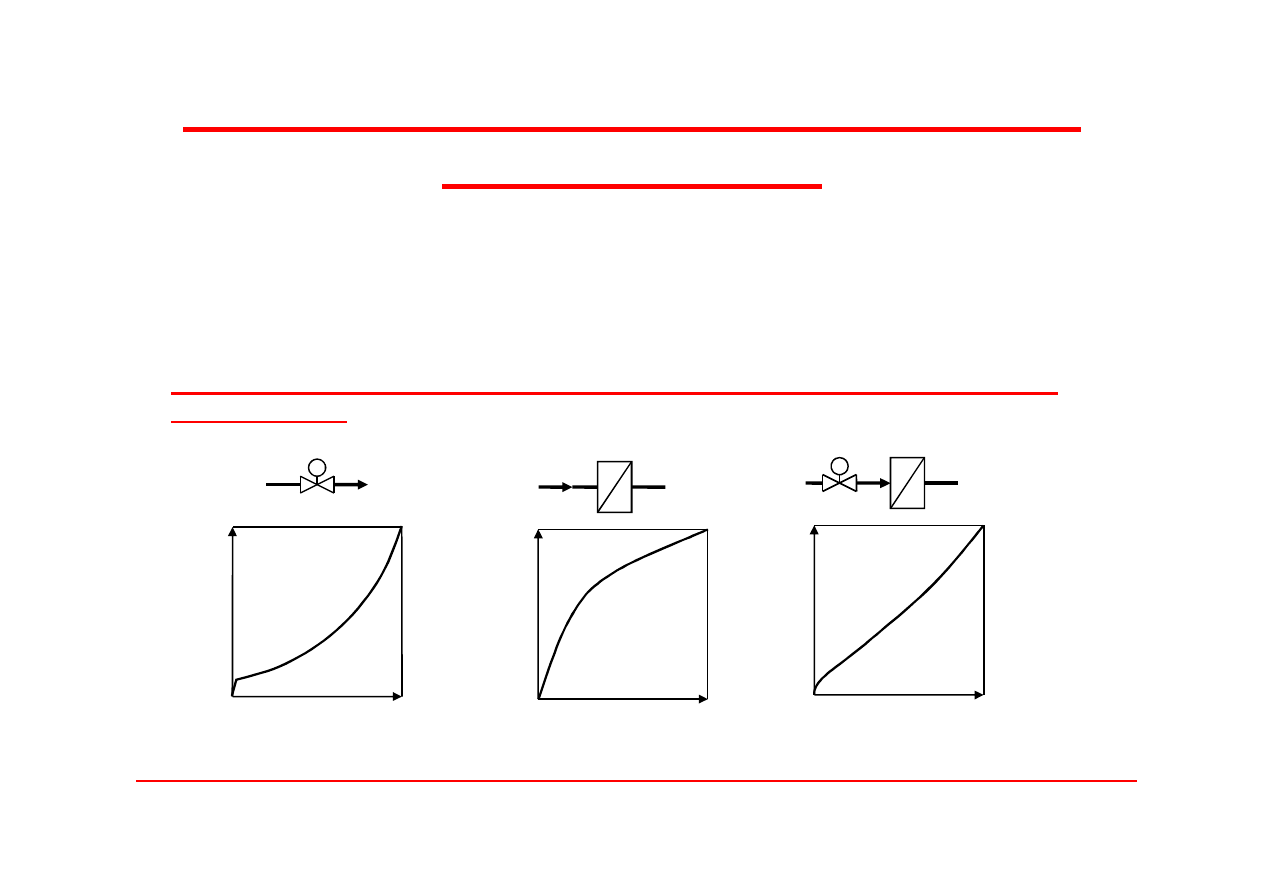
Przyk
ładowa charakterystyka statyczna
Przyk
ładowa charakterystyka statyczna
obiektu regulacji
obiektu regulacji
• Charakterystyki statyczne: a – zaworu regulacyjnego
(sta
łoprocentowa), b – wymiennika ciepła, c – wymiennika
ciep
ła wraz z zaworem regulacyjnym (obiekt regulacji)
•
Charakterystyki te wykorzystano przy opracowywaniu zasad doboru zaworów
regulacyjnych !
h/h
s
m
h
a
m/m
s
Q/Q
s
m
Q
b
h/h
s
h
Q/Q
s
m
Q/Q
s
m/m
s
Charakterystyki dynamiczne obiektów
Charakterystyki dynamiczne obiektów
regulacji
regulacji
• Charakterystyk
ę
dynamiczn
ą
elementu
lub
uk
ładu otrzymuje się jako odpowiedź sygnału
wyj
ściowego y(τ) na wymuszenie w postaci
zmiennego w czasie sygna
łu wejściowego x(τ).
Przed podaniem wymuszenia sygna
ły x(τ) i y(τ) są
w stanie ustalonym. Po podaniu wymuszenia i
up
ływie
odpowiednio
d
ługiego
czasu
uk
ład
ponownie
znajdzie
si
ę w stanie ustalonym.
Charakterystyka
dynamiczna
jest
funkcj
ą
przej
ścia
(transmitancj
ą)
pomi
ędzy
dwoma
stanami ustalonymi.
Analityczne wyznaczenie charakterystyki
Analityczne wyznaczenie charakterystyki
dynamicznej
dynamicznej
Analityczne wyznaczenie funkcji przej
ścia wymaga
rozwi
ązania równania różniczkowego, opisującego
model uk
ładu.
W
przypadku
uk
ładów opisanych równaniami
ró
żniczkowymi
liniowymi
powszechnie
wykorzystywane s
ą metody operatorowe.
Idea tej metody polega na:
znalezieniu przekszta
łcenia, które pozwala zastąpić
równania
ró
żniczkowo-całkowe
zwyk
łymi
równaniami algebraicznymi.
Najcz
ęściej stosowanym narzędziem
matematycznym jest
przekszta
łcenie Laplace’a
.
Transmitancja
Transmitancja
• Transmitancja (funkcja przej
ścia) jest definiowana jako
stosunek
transformaty
Laplace’a
sygna
łu wyjściowego
(funkcji odpowiedzi) do transformaty Laplace’a sygna
łu
wej
ściowego (funkcji wymuszającej), przy założeniu, że
wszystkie warunki pocz
ątkowe są zerowe.
• Transmitancja operatorowa jest szeroko wykorzystywana
w analizie i projektowaniu uk
ładów automatycznej regulacji.
Znaj
ąc
transmitancj
ę
operatorow
ą
uk
ładu,
mo
żna
wyznaczy
ć odpowiedź układu y(t) na dowolne wymuszenie
x(t) na wej
ściu do układu.
Przekszta
łcenie
Przekszta
łcenie Laplace’a
Laplace’a
Je
żeli
zale
żność
pomi
ędzy
sygna
łem
wyj
ściowym
i
wej
ściowym układu liniowego opiszemy przy pomocy
równania ró
żniczkowego o stałych współczynnikach, przy
czym n
≥m,
dokonuj
ąc przekształceń Laplace’a obydwu stron równania
u
b
dt
u
d
b
dt
u
d
b
y
a
dt
y
d
a
dt
y
d
a
m
m
m
m
m
m
o
n
n
n
n
n
n
0
1
1
1
1
1
1
...
...
+
+
+
=
+
+
+
−
−
−
−
−
−
+
+
+
=
+
+
+
−
−
−
−
−
−
u
b
dt
u
d
b
dt
u
d
b
L
y
a
dt
y
d
a
dt
y
d
a
L
m
m
m
m
m
m
o
n
n
n
n
n
n
0
1
1
1
1
1
1
...
...
Przekszta
łcenie
Przekszta
łcenie Laplace’a
Laplace’a
Transmitancja
Transmitancja
• otrzymamy równanie w postaci:
• Stosownie do przyj
ętej definicji transmitancji, jako stosunku
transformaty Laplace’a sygna
łu wyjściowego (funkcji
odpowiedzi) do transformaty sygna
łu wejściowego (funkcji
wymuszaj
ącej),
(
)
(
)
)
(
...
)
(
...
0
1
1
1
0
1
1
1
s
U
b
s
b
s
b
s
b
s
Y
a
s
a
s
a
s
a
m
m
m
m
n
n
n
n
+
+
+
+
=
+
+
+
+
−
−
−
−
[ ]
[ ]
)
(
)
(
)
(
s
U
s
Y
u
L
y
L
s
G
=
=
Transmitancja operatorowa
Transmitancja operatorowa
• Po przekszta
łceniach równania otrzymamy wymierną
funkcj
ę zmiennej zespolonej {s} nazywaną transmitancją
operatorow
ą
0
1
1
1
0
1
1
1
...
...
)
(
)
(
)
(
a
s
a
s
a
s
a
b
s
b
s
b
s
b
s
U
s
Y
s
G
n
n
n
n
m
m
m
m
+
+
+
+
+
+
+
+
=
=
−
−
−
−
Transmitancja
Transmitancja
W praktyce stosuje si
ę przekształcenie powyższego wzoru do postaci
zawieraj
ącej następujące parametry:
•
wspó
łczynnik wzmocnienia
K
,
•
sta
łe czasowe (zastępcze stałe czasowe):
T, Tz
,
•
czas opó
źnienia (liczba tłumienia):
Tt, To,
•
zmienn
ą zespoloną {
s
}, (s=b+j
ω),
Transmitancja przyk
ładowego obiektu regulacji (obiekt inercyjny
wy
ższego rzędu)
0
1
1
1
0
1
1
1
...
...
)
(
)
(
)
(
a
s
a
s
a
s
a
b
s
b
s
b
s
b
s
U
s
Y
s
G
n
n
n
n
m
m
m
m
+
+
+
+
+
+
+
+
=
=
−
−
−
−
0
sT
-
e
1
)
(
⋅
+
⋅
≅
s
T
K
s
G
z
Do
świadczalne metody wyznaczania
Do
świadczalne metody wyznaczania
charakterystyk dynamicznych
charakterystyk dynamicznych
• Do
świadczalne metody identyfikacji stosowane są w
przypadku
niedostatecznej
znajomo
ści
zjawisk
zachodz
ących w obiekcie regulacji.
• Najcz
ęściej jest stosowana metoda oceny transmitancji
obiektu na podstawie odpowiedzi na wymuszenie skokowe
nazywana charakterystyk
ą skokową.
• Metoda umo
żliwia proste wyznaczenie współczynnika
wzmocnienia obiektu (
statycznego!
), równego stosunkowi
warto
ści ustalonej odpowiedzi skokowej do wartości sygnału
wej
ściowego
u
y
K
∆
∆
=
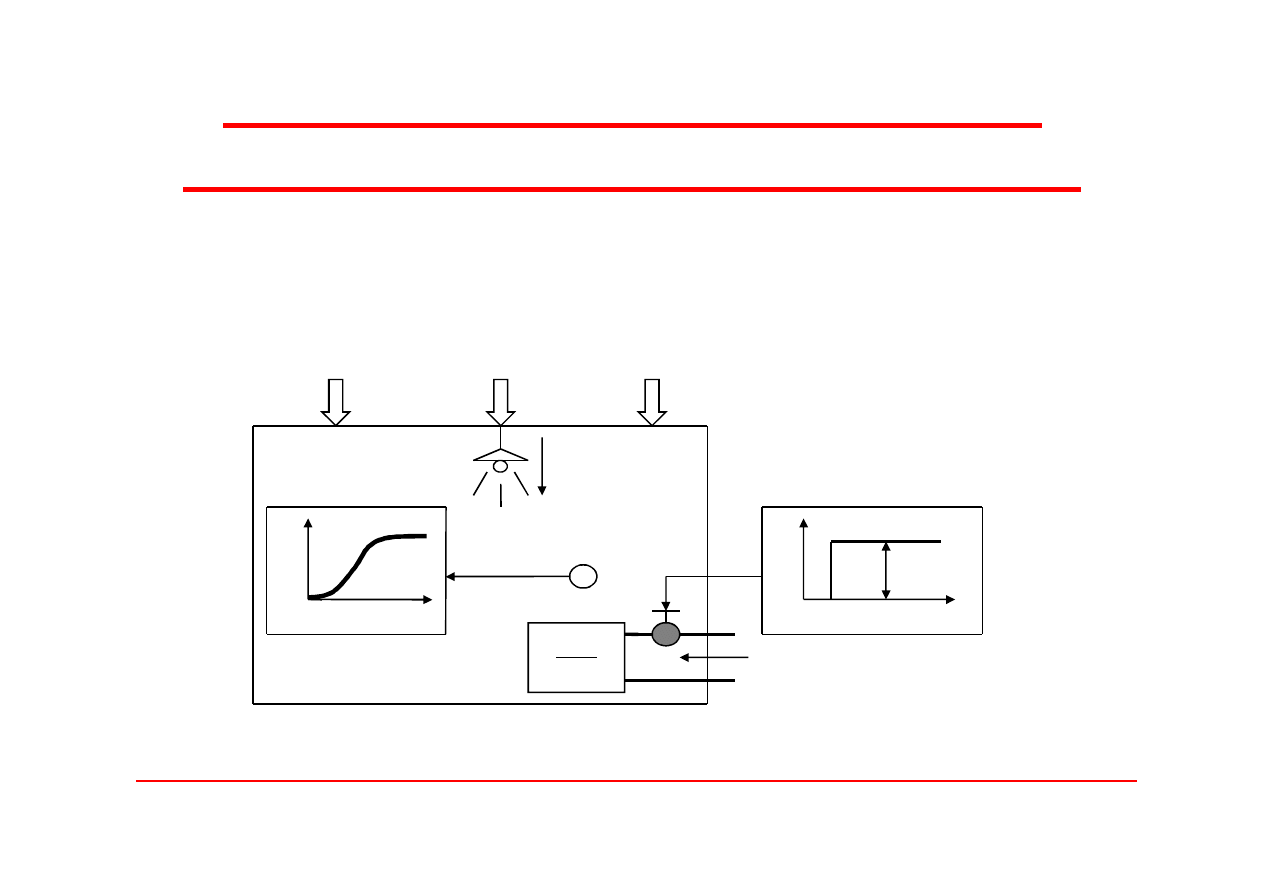
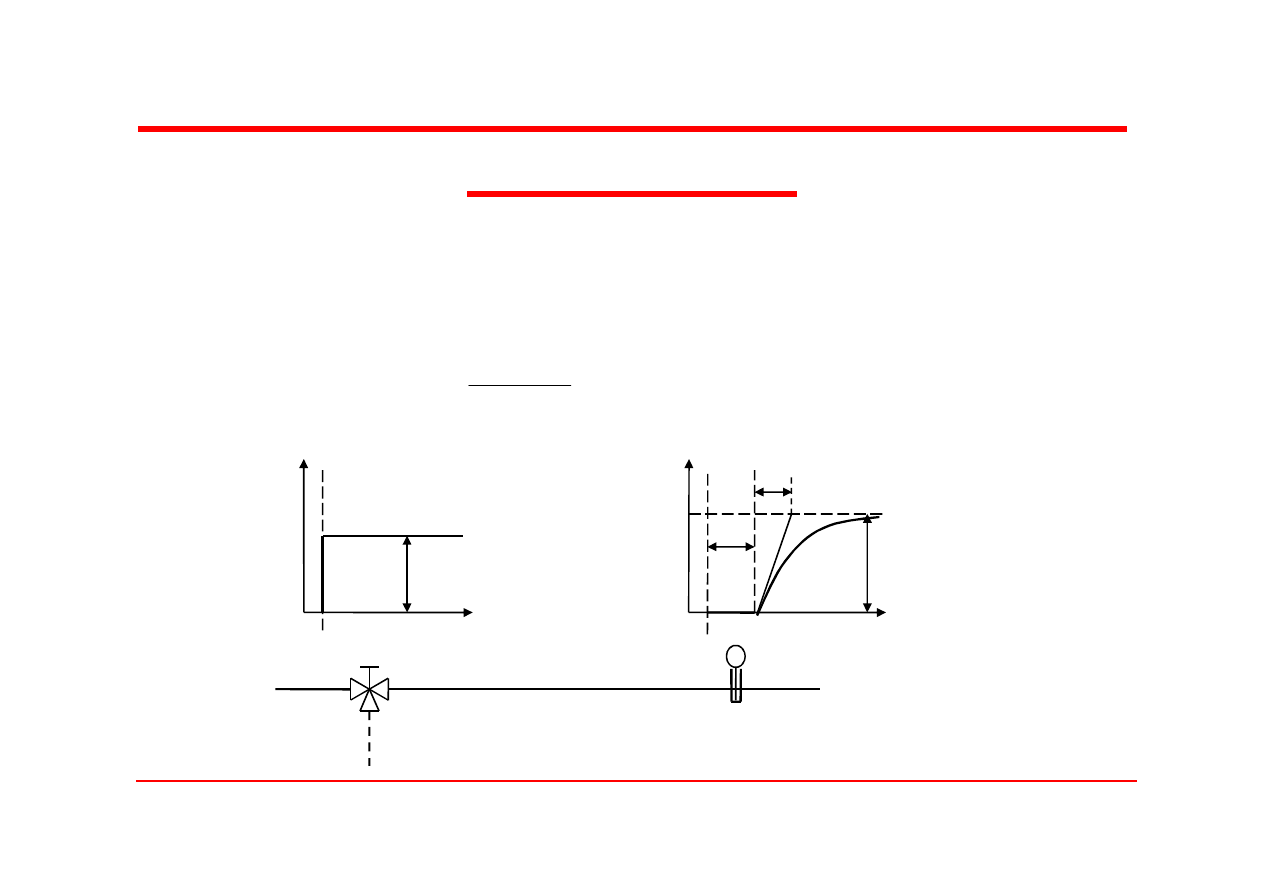
Przyk
ład doświadczalnego sposobu
Przyk
ład doświadczalnego sposobu
sporz
ądzania charakterystyki skokowej
sporz
ądzania charakterystyki skokowej
• Metoda rejestracji odpowiedzi obiektu regulacji (temperatury
powietrza w ogrzewanym pomieszczeniu) na wymuszenie
skokowe
2
τ
u
Δu
t
i
τ
T
t
i
=f(τ)
))
odpowied
ź skokowa
wymuszenie skokowe
3
z
4
1
z
5
z
1
z
2
z
3
y=t
i
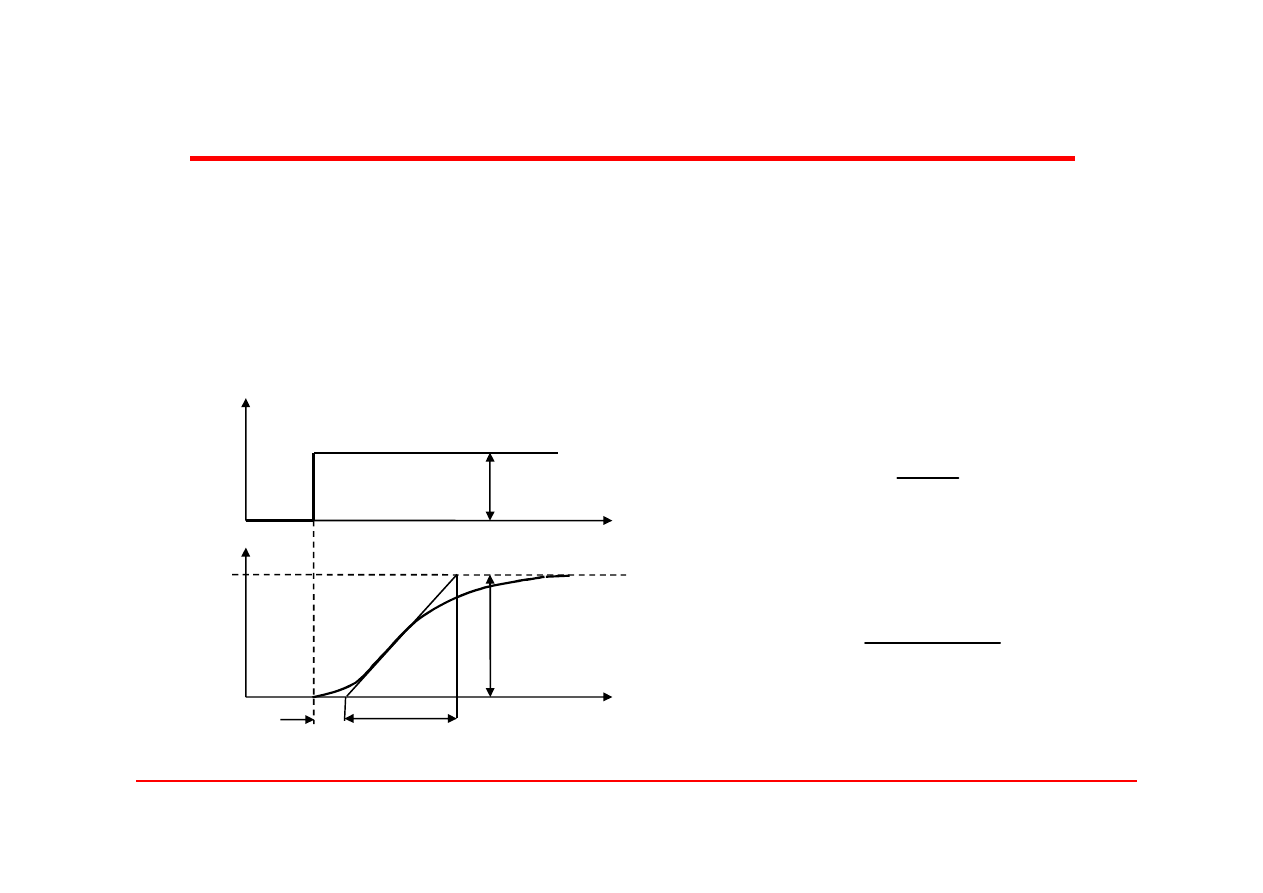
Przyk
ładowa charakterystyka skokowa
Przyk
ładowa charakterystyka skokowa
• Uzyskana eksperymentalnie odpowied
ź obiektu regulacji
(temperatury powietrza w ogrzewanym pomieszczeniu) na
wymuszenie skokowe
.
u, (h)
Δu = Δh
y, (t
i
)
τ
τ
τ
0
Δy = Δt
i
T
0
T
z
u
y
K
∆
∆
=
0
sT
-
e
1
)
(
⋅
+
⋅
≅
s
T
K
s
G
z
Inercyjny kszta
łt odpowiedzi skokowej
Inercyjny kszta
łt odpowiedzi skokowej
•
Kszta
łt
odpowiedzi obiektu regulacji na wymuszenie
skokowe mo
żna zrozumieć analizując przebieg ciągu
procesów zachodz
ących podczas eksperymentu:
1.
Wymuszona zmiana stopnia otwarcia zaworu powoduje
skokow
ą
zmian
ę
strumienia
czynnika
grzejnego.
Wynikaj
ąca stąd zmiana mocy grzejnika przebiega z
pewnym opó
źnieniem.
2.
Z opó
źnieniem zachodzą także kolejne procesy: wymiana
ciep
ła pomiędzy grzejnikiem a pomieszczeniem za
po
średnictwem powietrza oraz transport ciepła od
otoczenia do czujnika temperatury.
3.
Te wszystkie wp
ływy razem wyjaśniają inercyjny kształt
odpowiedzi skokowej.
Inercyjny kszta
łt odpowiedzi skokowej
Inercyjny kszta
łt odpowiedzi skokowej
• Po zrównaniu nowej warto
ści strat ciepła pomieszczenia
(przy zmienionej ró
żnicy temperatury wewnętrznej i
zewn
ętrznej) z ilością ciepła dostarczanego przez grzejnik
powstaje nowy stan równowagi i od tego momentu
temperatura powietrza utrzymuje si
ę na stałym poziomie.
Rodzaje charakterystyk dynamicznych
Rodzaje charakterystyk dynamicznych
obiektów regulacji
obiektów regulacji
Obiekty regulacji klasyfikuje si
ę zwykle ze względu na ich
w
łasności dynamiczne.
Podstawowym kryterium podzia
łu obiektów regulacji jest
samodzielne
osi
ąganie
stanu
trwa
łej
równowagi
po
wprowadzeniu
skokowego
wymuszenia
sygna
łu
wej
ściowego.
Zgodnie z tym kryterium rozró
żnia się dwie grupy obiektów:
• Obiekty
astatyczne
(bez
samowyrównania),
których
warto
ść odpowiedzi skokowej dąży do nieskończoności.
• Obiekty
statyczne
(z
samowyrównaniem),
których
odpowiedzi skokowe d
ążą do wartości skończonej.
Obiekty astatyczne (bez
Obiekty astatyczne (bez
samowyrównania)
samowyrównania)
• Obiekty,
których
warto
ść odpowiedzi na wymuszenie
skokowe d
ąży do nieskończoności i nie osiąga nowego
stanu
ustalonego
nazywane
s
ą
astatycznymi
(bez
samowyrównania).
• W
łasności dynamiczne idealnego obiektu całkującego
mo
żna opisać równaniem różniczkowym:
• transmitancj
ą operatorową:
)
(
)
(
τ
τ
τ
u
K
d
dy
⋅
=
s
K
)
s
(
U
)
s
(
Y
)
s
(
G
=
=
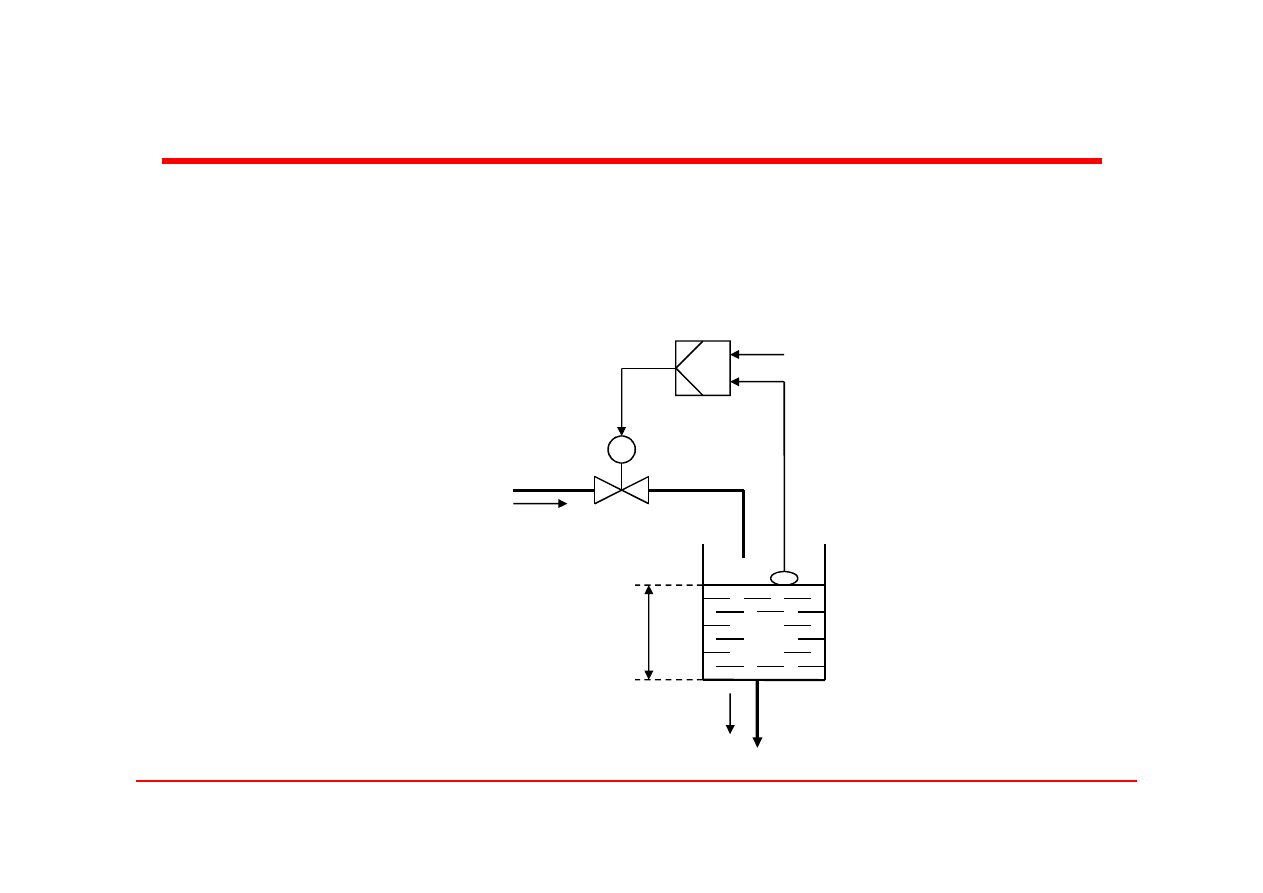
Astatyczny obiekt regulacji
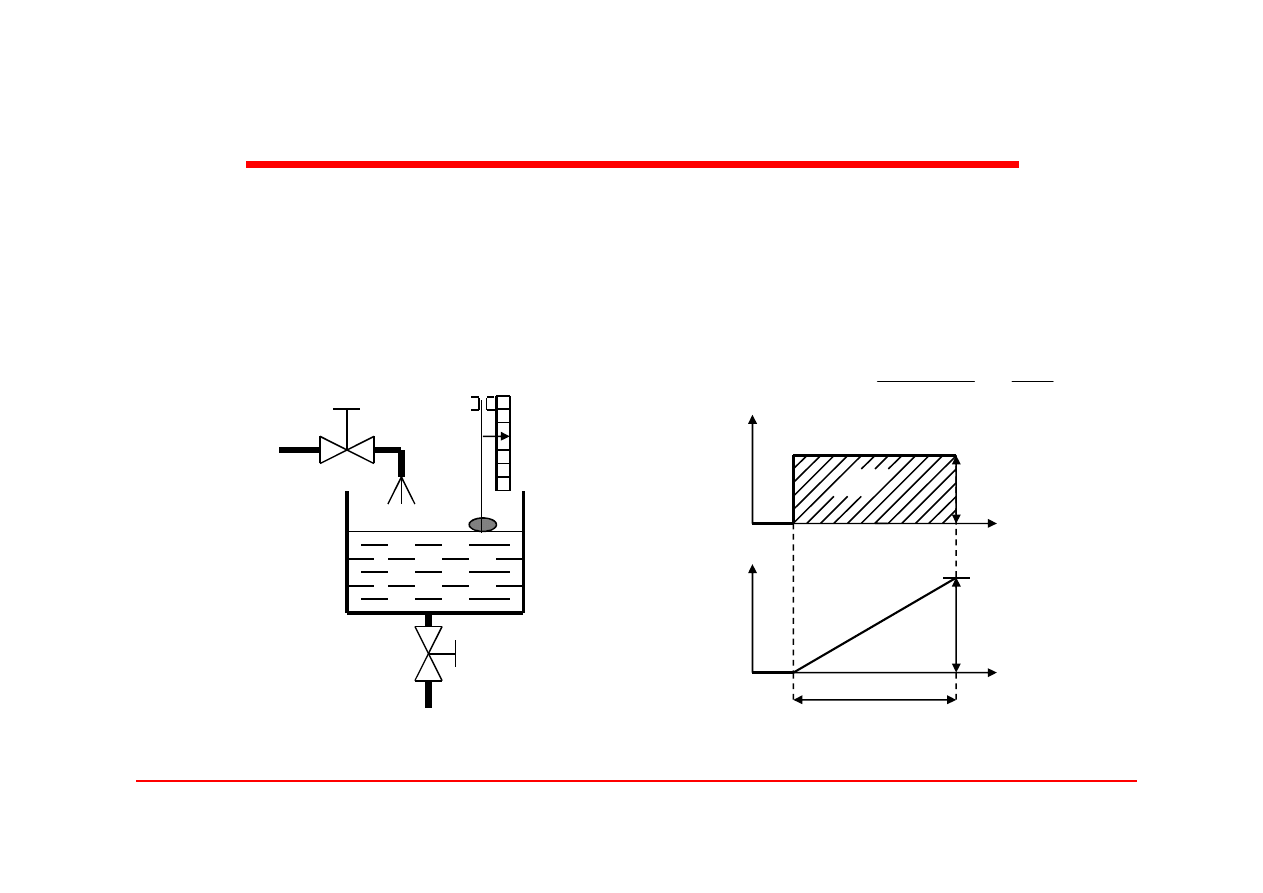
Astatyczny obiekt regulacji
• Astatyczny obiekt regulacji jakim jest zbiornik
wody z regulowanym poziomem
Δu
s
u
τ
τ
0
0
τ
y
Δτ
Δy
A
u
y = h
u = h
s
→ V
u
A
y
d
u
y
K
∆
=
⋅
∆
=
∫
τ
Obiekty statyczne (z samowyrównaniem)
Obiekty statyczne (z samowyrównaniem)
Odpowiedzi obiektów cieplnych na
wymuszenie skokowe mo
żna podzielić na :
• proporcjonalne,
• inercyjne pierwszego rz
ędu,
• inercyjne pierwszego rz
ędu z opóźnieniem,
• inercyjne wy
ższego rzędu.
Podstawowe charakterystyki skokowe
Podstawowe charakterystyki skokowe
obiektów statycznych
obiektów statycznych
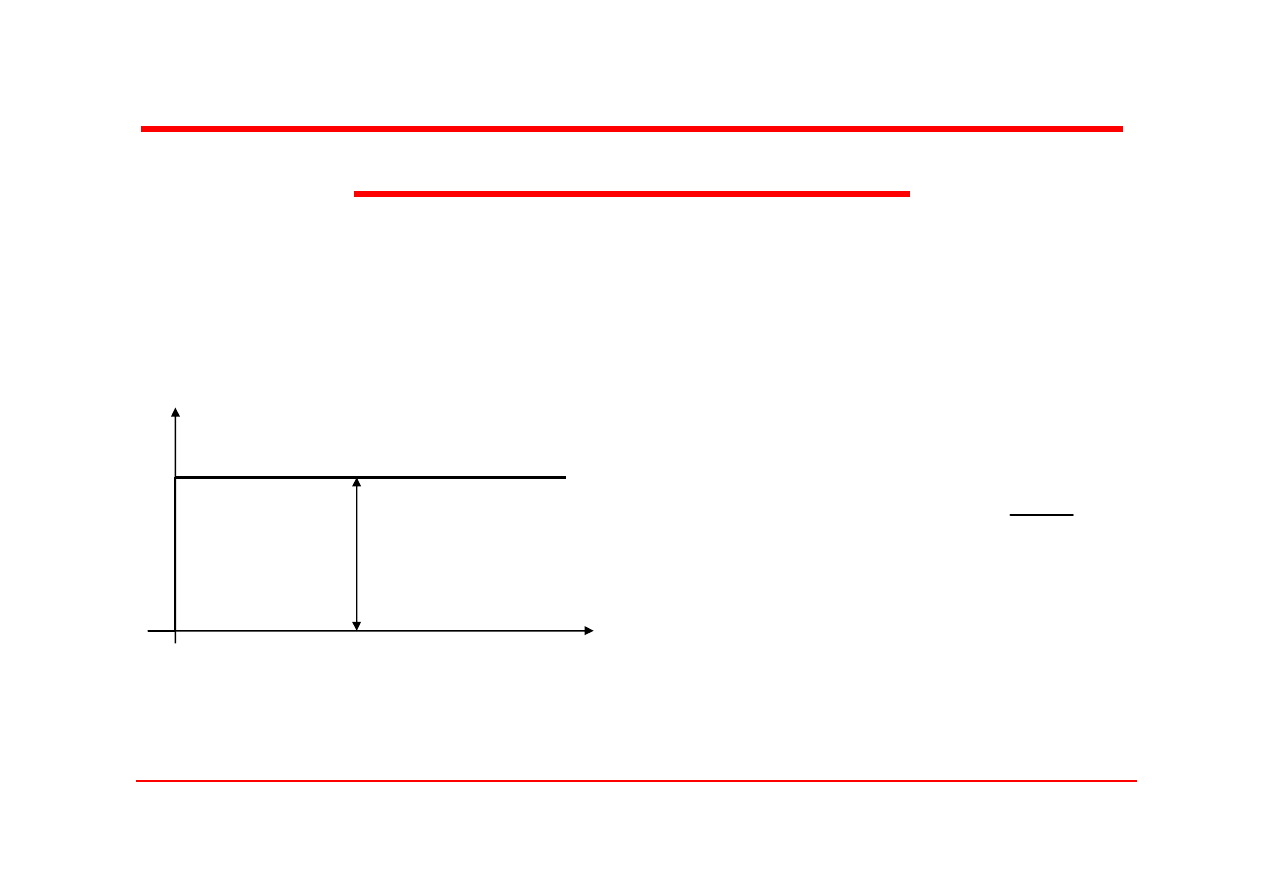
1. Obiekt proporcjonalny
Charakterystyka skokowa
Transmitancja operatorowa ( K-
wspó
łczynnik wzmocnienia),
y
Δy
τ
)
(
u
y
K
s
G
∆
∆
=
=
Podstawowe charakterystyki skokowe
Podstawowe charakterystyki skokowe
obiektów statycznych
obiektów statycznych
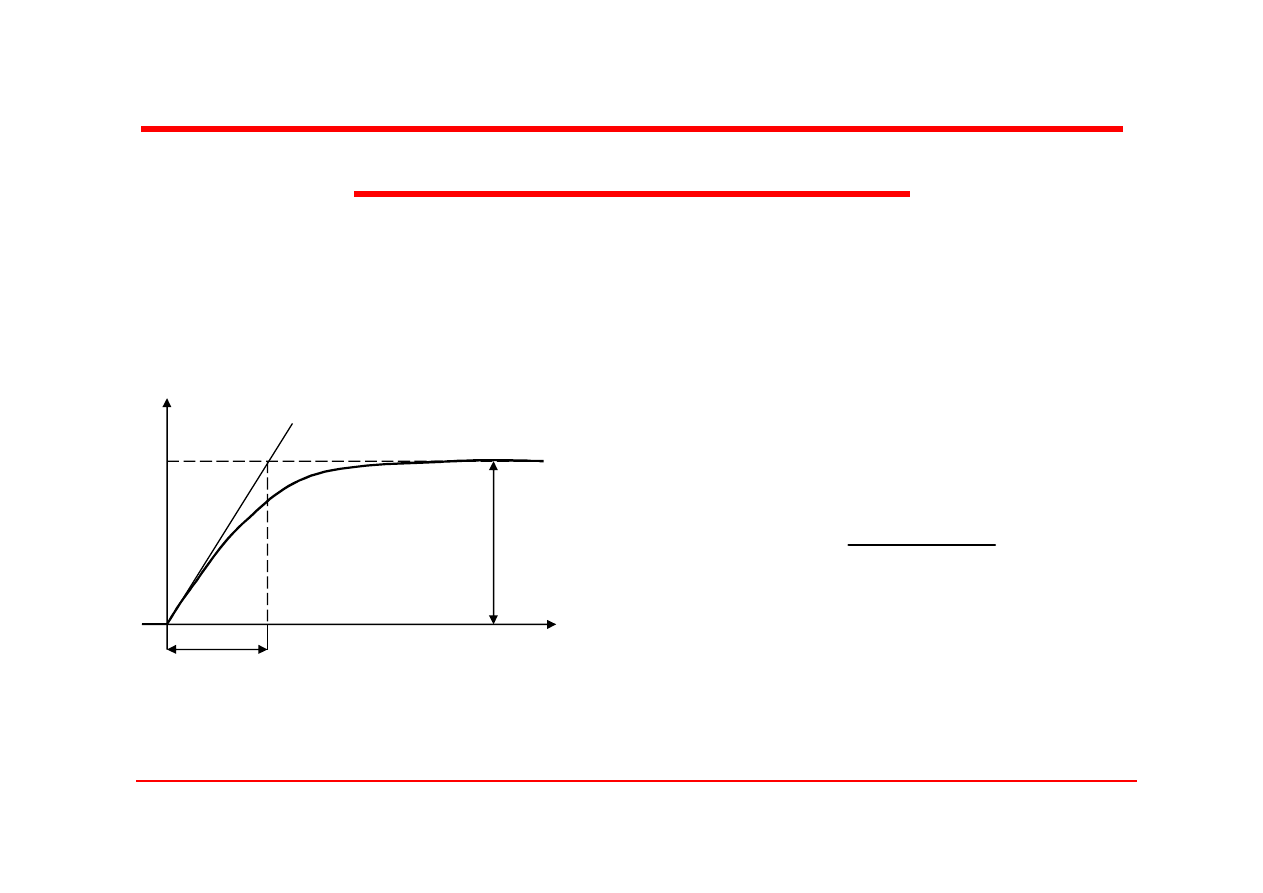
2. Obiekt inercyjny pierwszego rz
ędu
Charakterystyka skokowa
Transmitancja operatorowa
T- sta
ła czasowa
T
Δy
τ
y
1
s
T
K
)
s
(
G
+
⋅
=
Podstawowe charakterystyki skokowe
Podstawowe charakterystyki skokowe
obiektów statycznych
obiektów statycznych
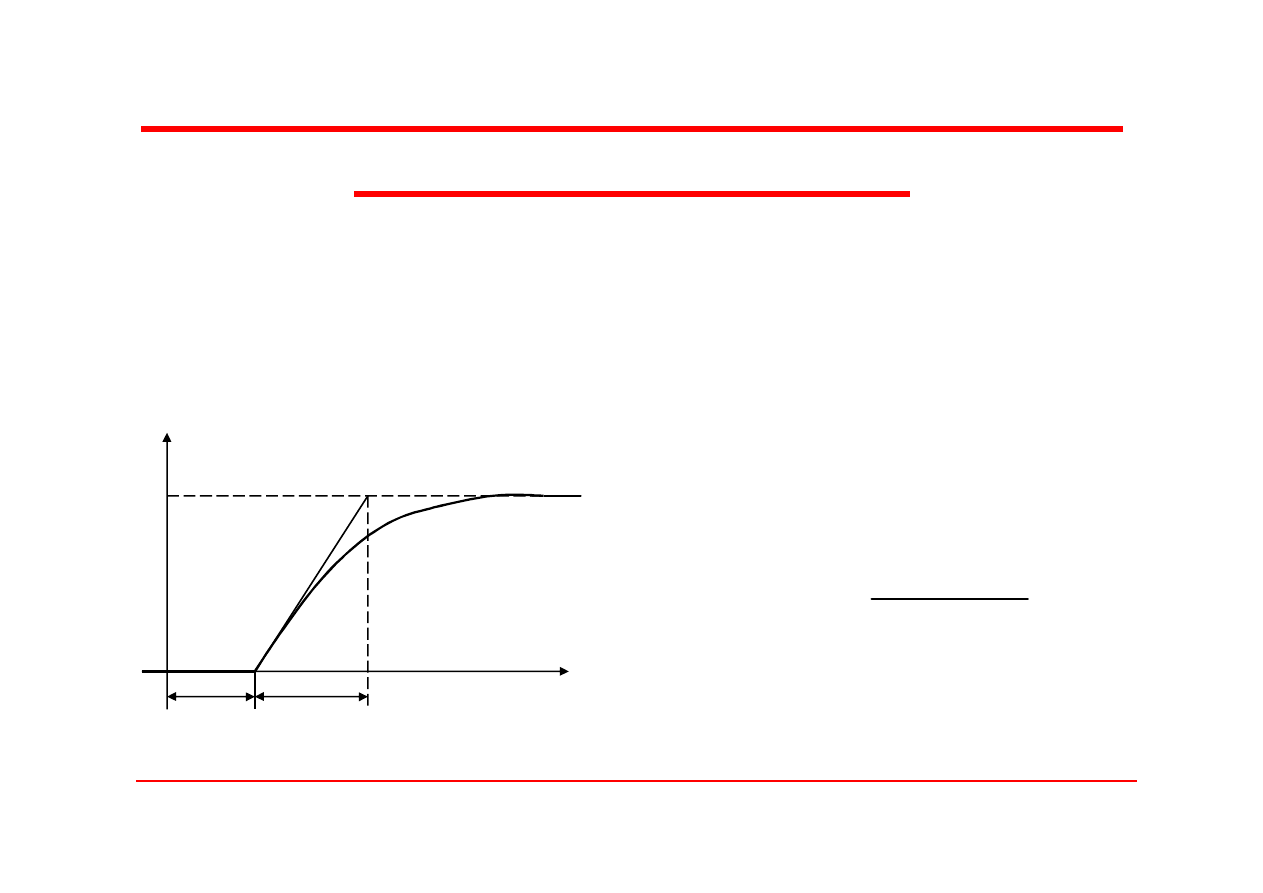
3. Obiekt inercyjny pierwszego rz
ędu z
opó
źnieniem
Charakterystyka skokowa
Transmitancja operatorowa
Tt –czas opó
źnienia (opóźnienie transportowe).
T
T
t
τ
y
Tt
s
-
e
1
s
T
K
)
s
(
G
⋅
+
⋅
=
Podstawowe charakterystyki skokowe
Podstawowe charakterystyki skokowe
obiektów statycznych
obiektów statycznych
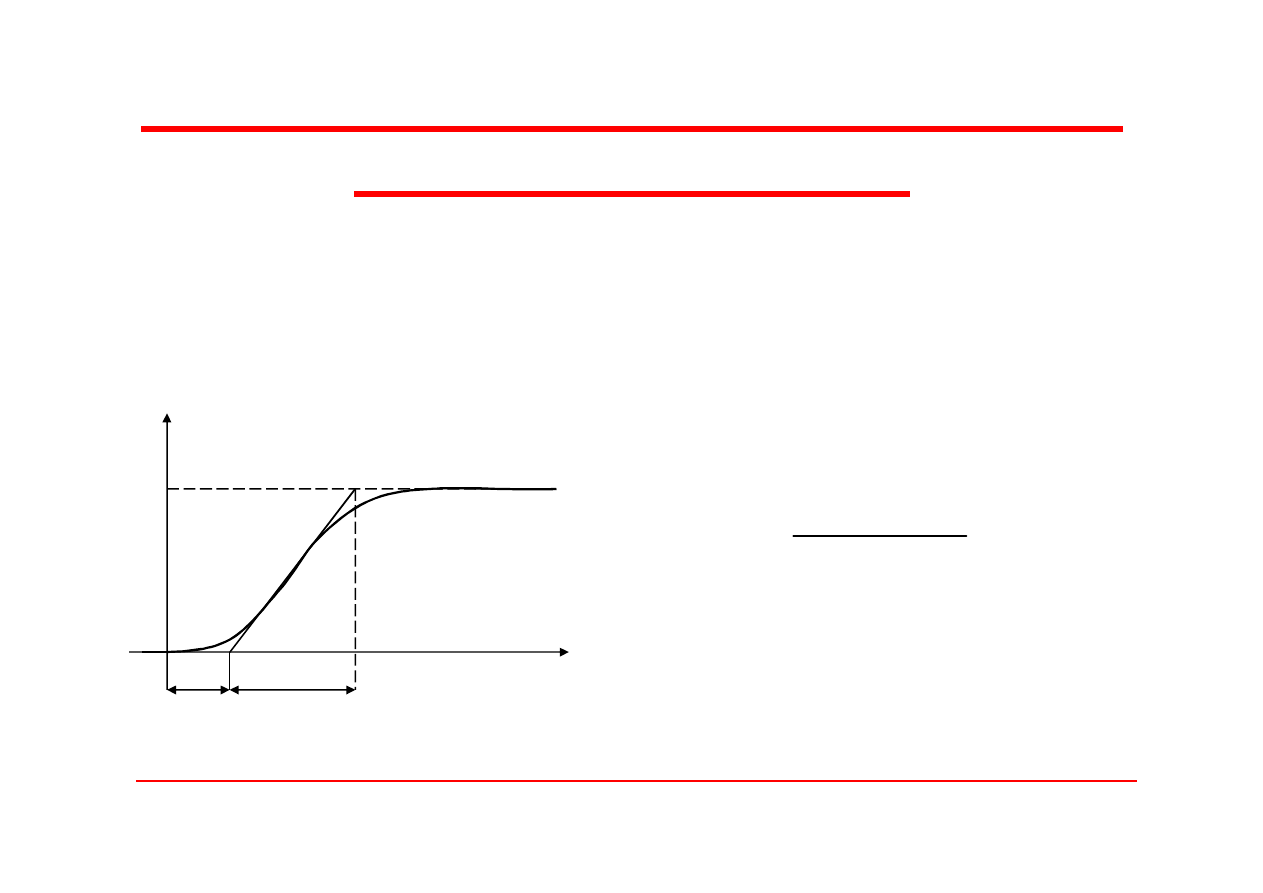
4. Obiekt inercyjny wy
ższego rzędu
Charakterystyka skokowa
Transmitancja operatorowa
To – opó
źnienie zastępcze, Tz - zastępcza stała czasowa
T
0
T
z
τ
y
0
sT
-
e
1
)
(
⋅
+
⋅
≅
s
T
K
s
G
z
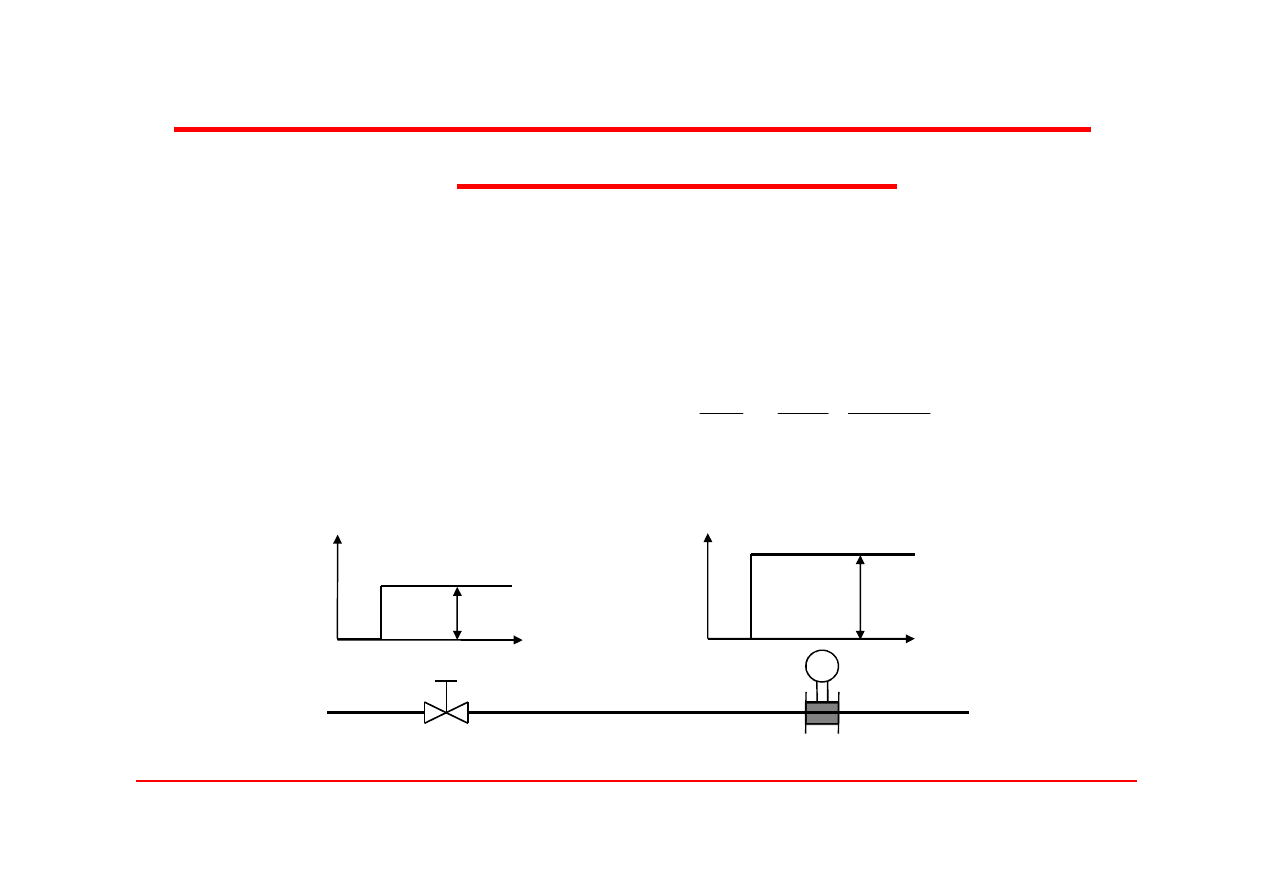
Przyk
łady charakterystyk dynamicznych
Przyk
łady charakterystyk dynamicznych
obiektów cieplnych
obiektów cieplnych
1.
Obiekt
proporcjonalny
-
odcinek
przewodu
z
zaworem
regulacyjnym oraz czujnikiem przep
ływu
Wielko
ścią charakteryzującą proporcjonalny obiekt regulacji przepływu
jest wspó
łczynnik wzmocnienia
V
u = h
y = V
u
τ
0
τ
Δu
y
Δy = K·Δu
τ
0
τ
∆
∆
=
∆
∆
=
%
/
3
h
m
h
V
u
y
K
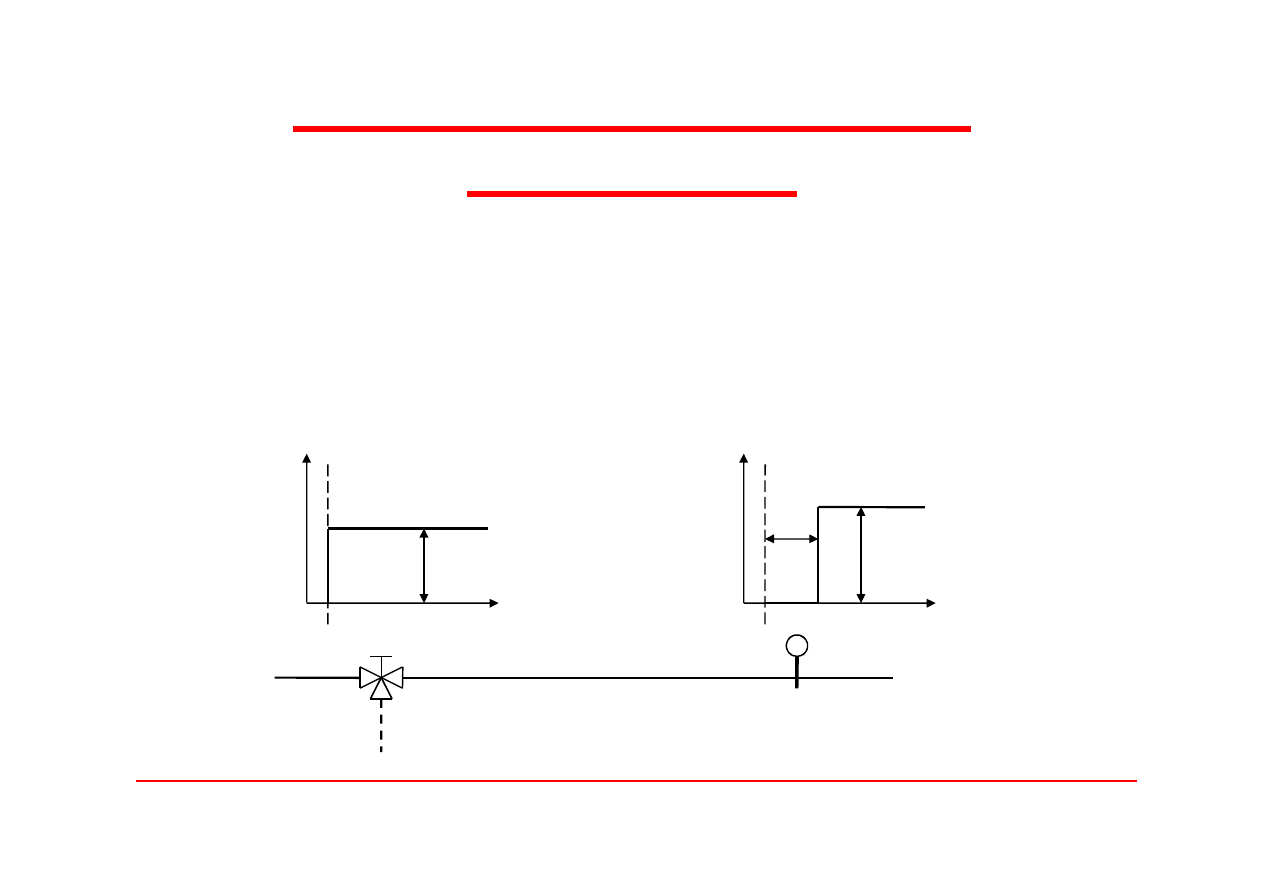
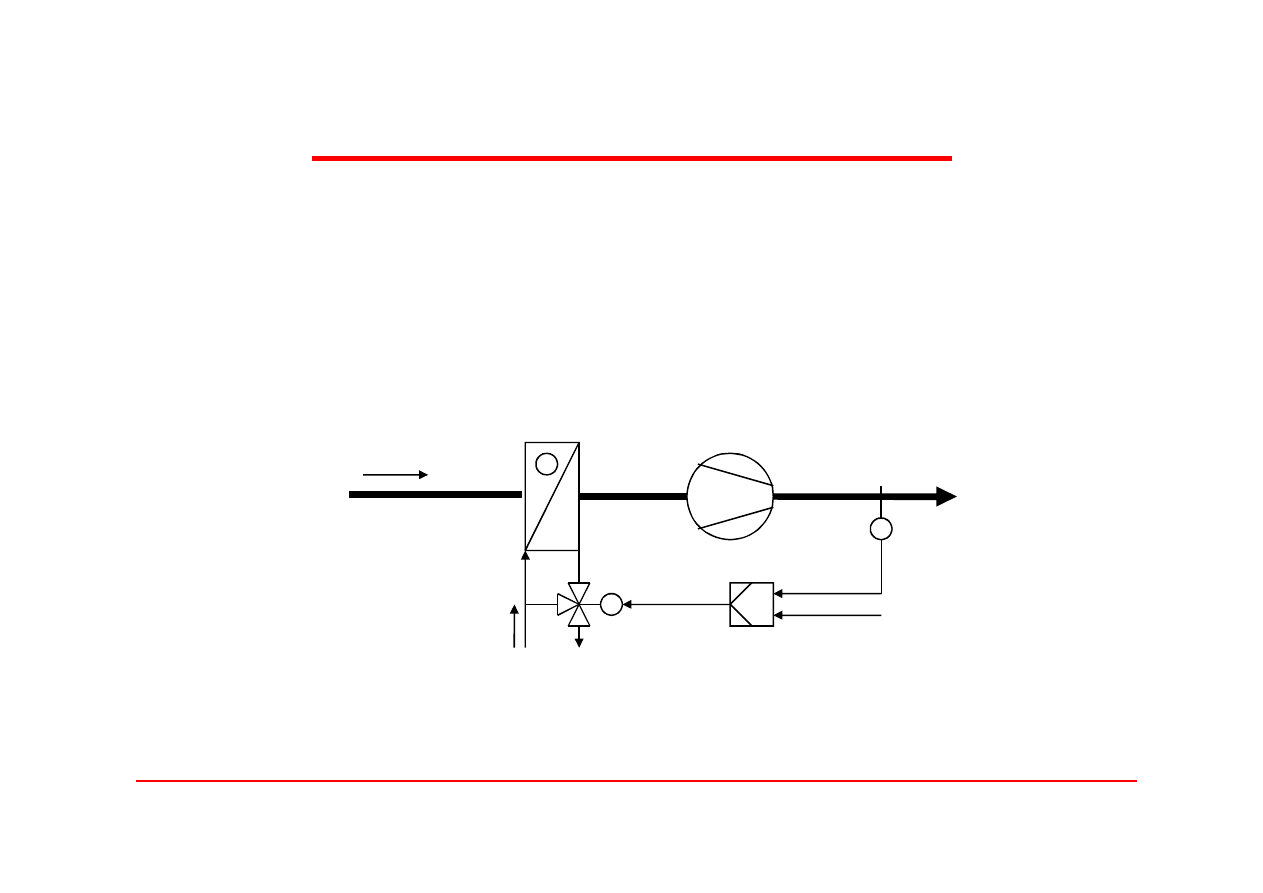
2. Obiekt proporcjonalny z
2. Obiekt proporcjonalny z
opó
źnieniem
opó
źnieniem
a. Przewód z mieszaj
ącym zaworem regulacyjnym oraz czujnikiem
temperatury – równanie opisuj
ące charakterystykę skokową:
y(τ) = K· u(τ – T
t
)
lub w postaci operatorowej
T
τ
0
τ
Δu
u
u = h
A
B
AB
T
t
y
τ
0
τ
Δy = K·Δu
y = t
c
s
T
t
e
K
)
s
(
G
⋅
−
⋅
=
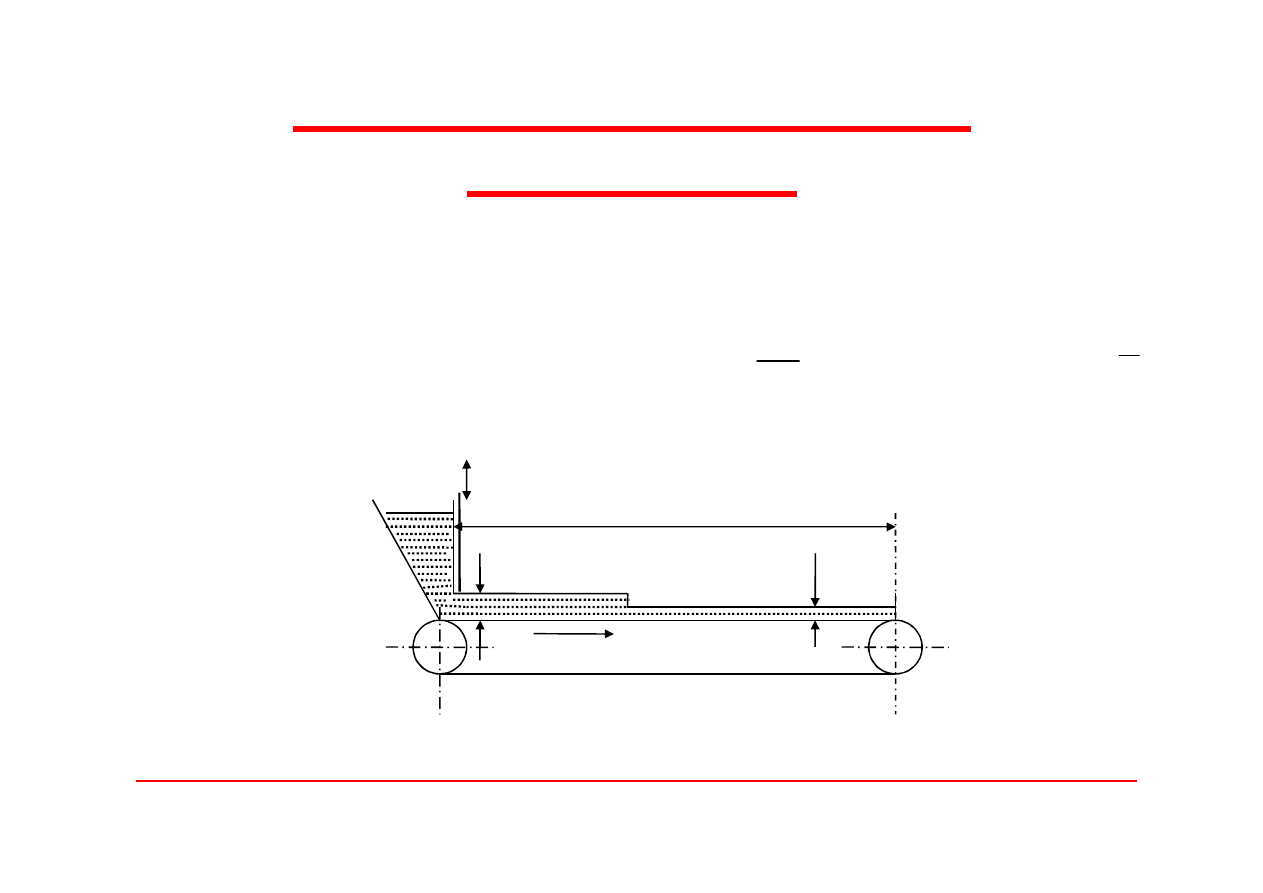
2. Obiekt proporcjonalny z
2. Obiekt proporcjonalny z
opó
źnieniem
opó
źnieniem
b.Ta
śmowy podajnik węgla
•
Grubość warstwy paliwa y w odległości l od początku podajnika będzie równa
•
grubości warstwy na początku podajnika u (K = = 1) po upływie czasu Tt =
v
l
u
y
h
u
y
∆
∆
v
l
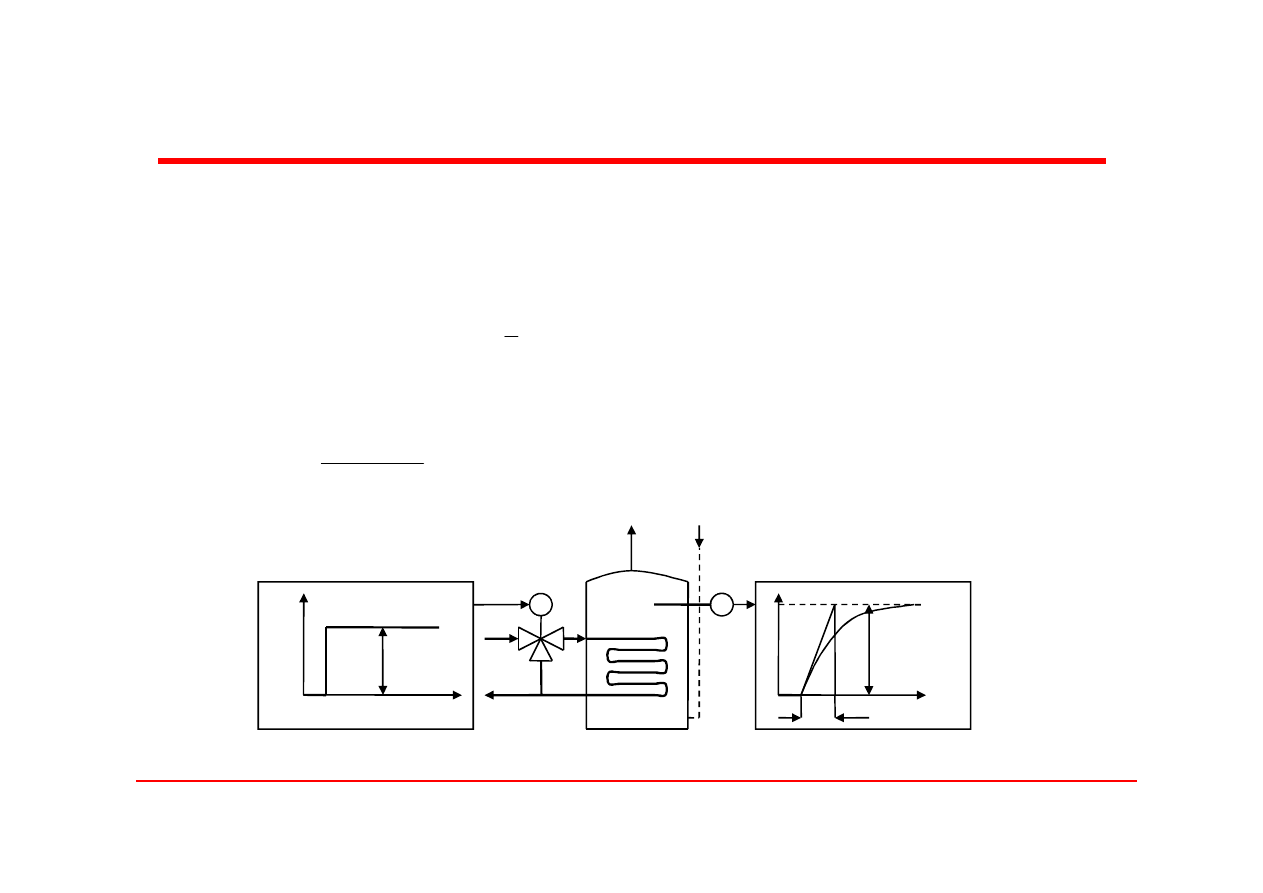
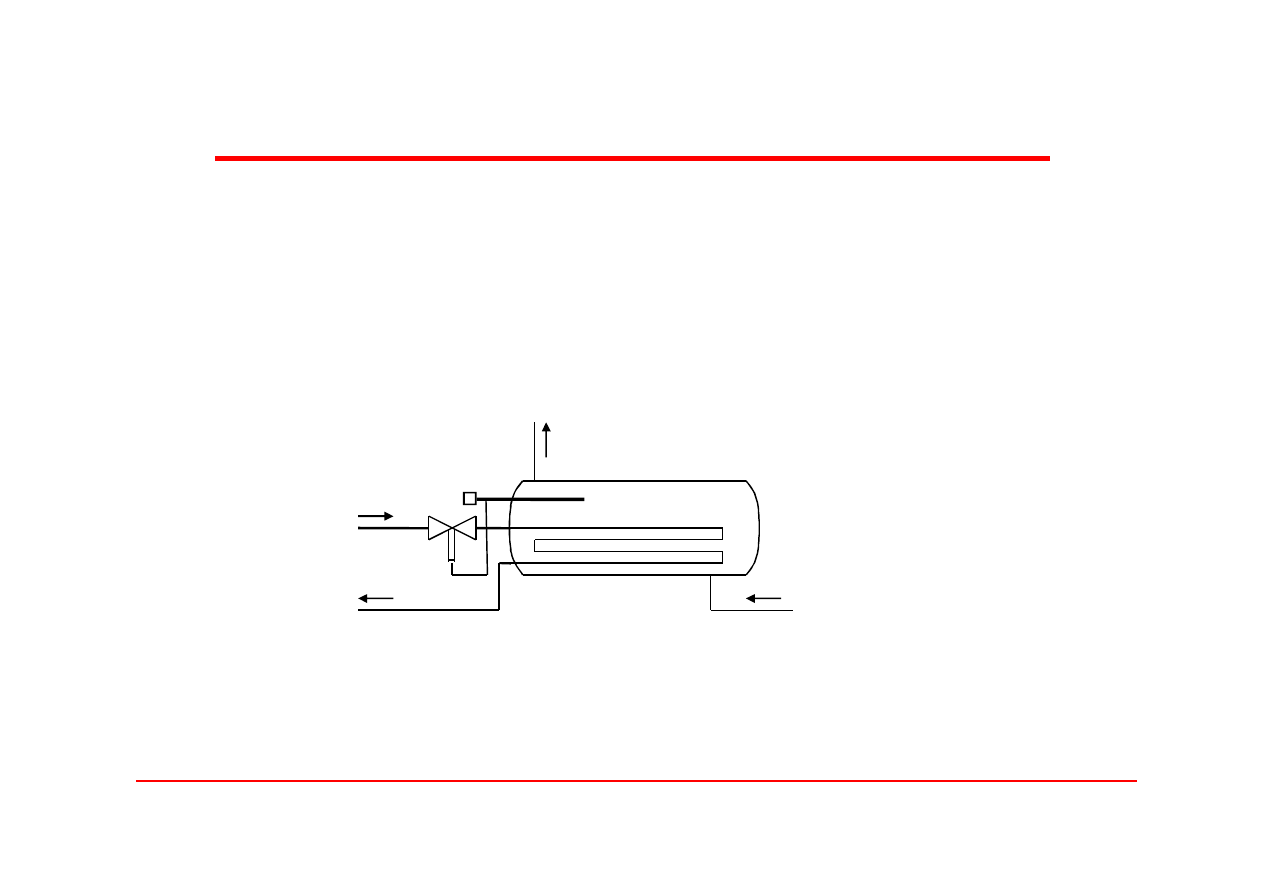
3. Obiekt inercyjny pierwszego rz
ędu
3. Obiekt inercyjny pierwszego rz
ędu
Podgrzewacz ciep
łej wody z trójdrogowym zaworem regulacyjnym
Równanie charakterystyki jako odpowied
ź na wymuszenie skokowe:
lub w postaci transmitancji operatorowej:
T
Δu=Δh
u
τ
y
τ
Δy=K·Δu
T
τ
0
τ
0
)
1
(
)
(
)
(
T
e
u
K
y
τ
τ
τ
−
−
⋅
⋅
=
1
s
T
K
)
s
(
G
+
⋅
=
4. Obiekt inercyjny pierwszego rz
ędu z
4. Obiekt inercyjny pierwszego rz
ędu z
opó
źnieniem
opó
źnieniem
Przewód z trójdrogowym zaworem regulacyjnym oraz czujnikiem
temperatury w obudowie ochronnej
Transmitancja operatorowa obiektu inercyjnego pierwszego rz
ędu z
opó
źnieniem
s
T
-
t
e
1
s
T
K
)
s
(
G
⋅
+
⋅
=
T
τ
0
τ
Δu
u
u = h
A
B
AB
T
t
y
τ
0
τ
Δy = K·Δu
y = t
c
T
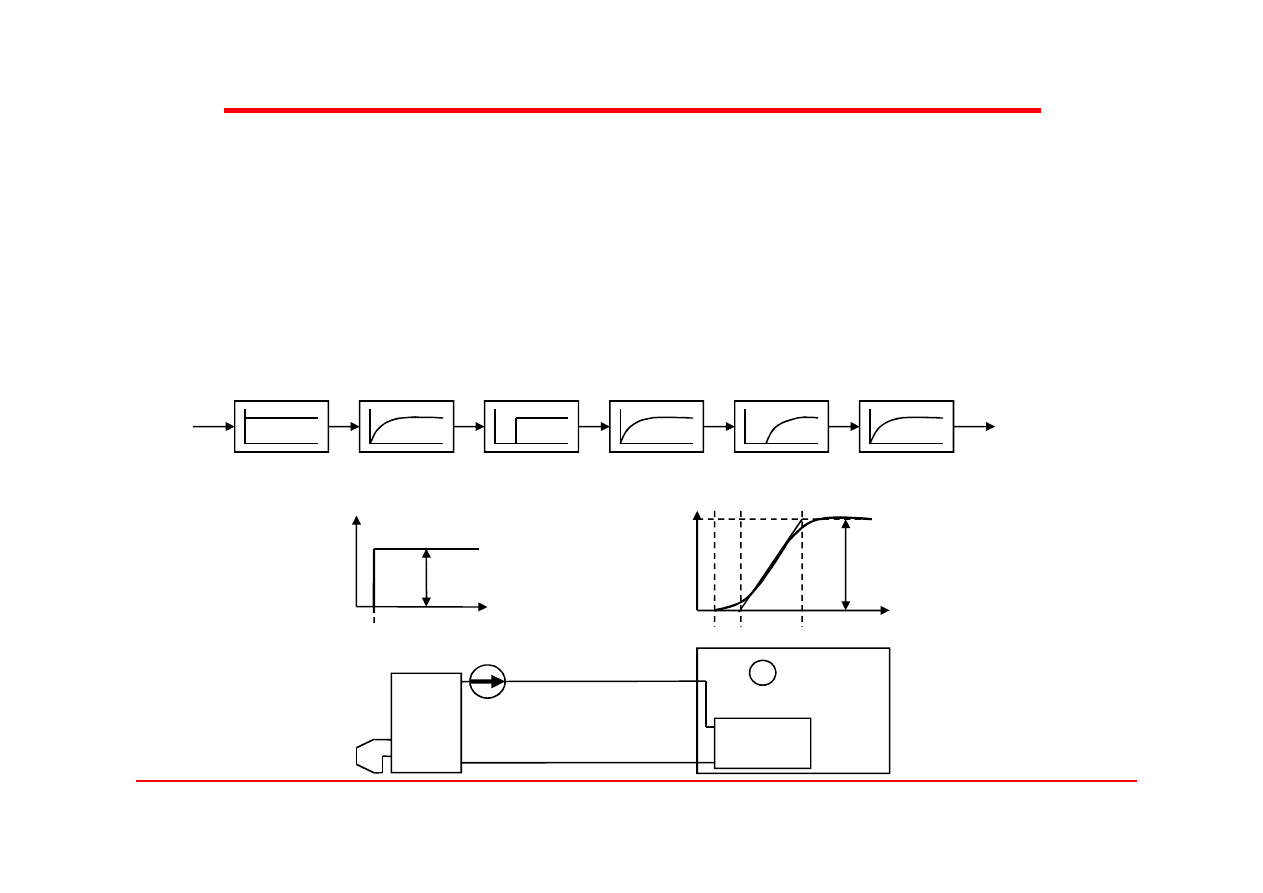
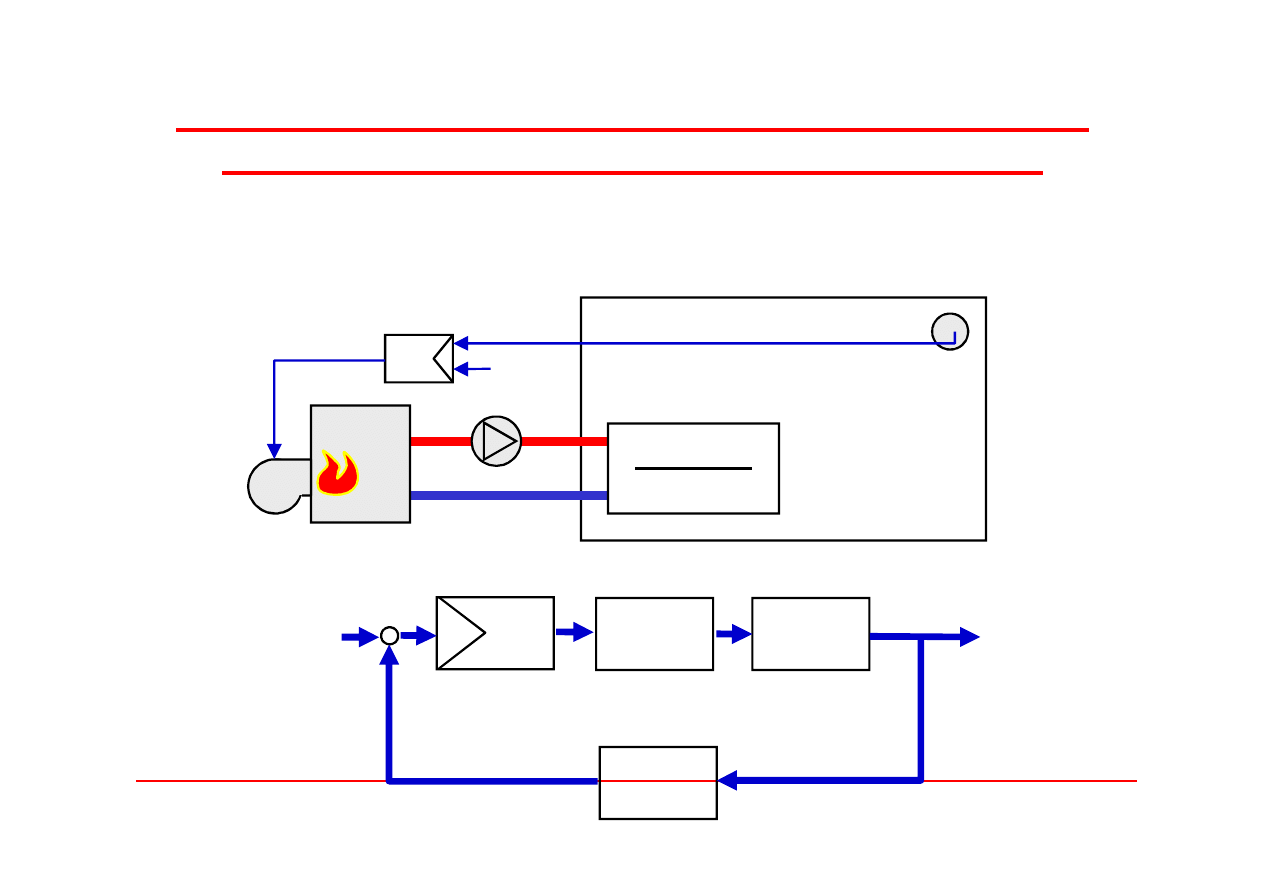
5. Obiekt inercyjny wy
ższego rzędu.
5. Obiekt inercyjny wy
ższego rzędu.
Kocio
ł z palnikiem, instalacją c.o., grzejnikiem oraz pomiarem
temperatury w pomieszczeniu.
Charakterystyka obiektu sk
łada się z: charakterystyki proporcjonalnej
palnika, proporcjonalnej z opó
źnieniem przewodów instalacji, inercyjnej
pierwszego rz
ędu kotła, grzejnika i czujnika temperatury oraz inercyjnej
pierwszego rz
ędu z opóźnieniem pomieszczenia
T
0
τ
0
τ
Δy=K·Δu
T
z
y
τ
0
Δu
τ
u
T
palnik
kocio
ł
przewody
grzejnik
pomieszczenie
czujnik
u
y
b
Obiekt inercyjny wy
ższego rzędu
Obiekt inercyjny wy
ższego rzędu
• Zastępcza transmitancja obiektu inercyjnego wyższego rzędu
zapisywana jest w postaci
lub
gdzie: Tz - zastępcza stała czasowa,
To – opóźnienie zastępcze,
n – rząd inercyjności (n jest funkcją stałych czasowych).
s
T
-
z
0
e
1
s
T
K
)
s
(
G
⋅
+
⋅
=
s
T
-
n
t
e
)
1
s
T
(
K
)
s
(
G
⋅
+
⋅
=
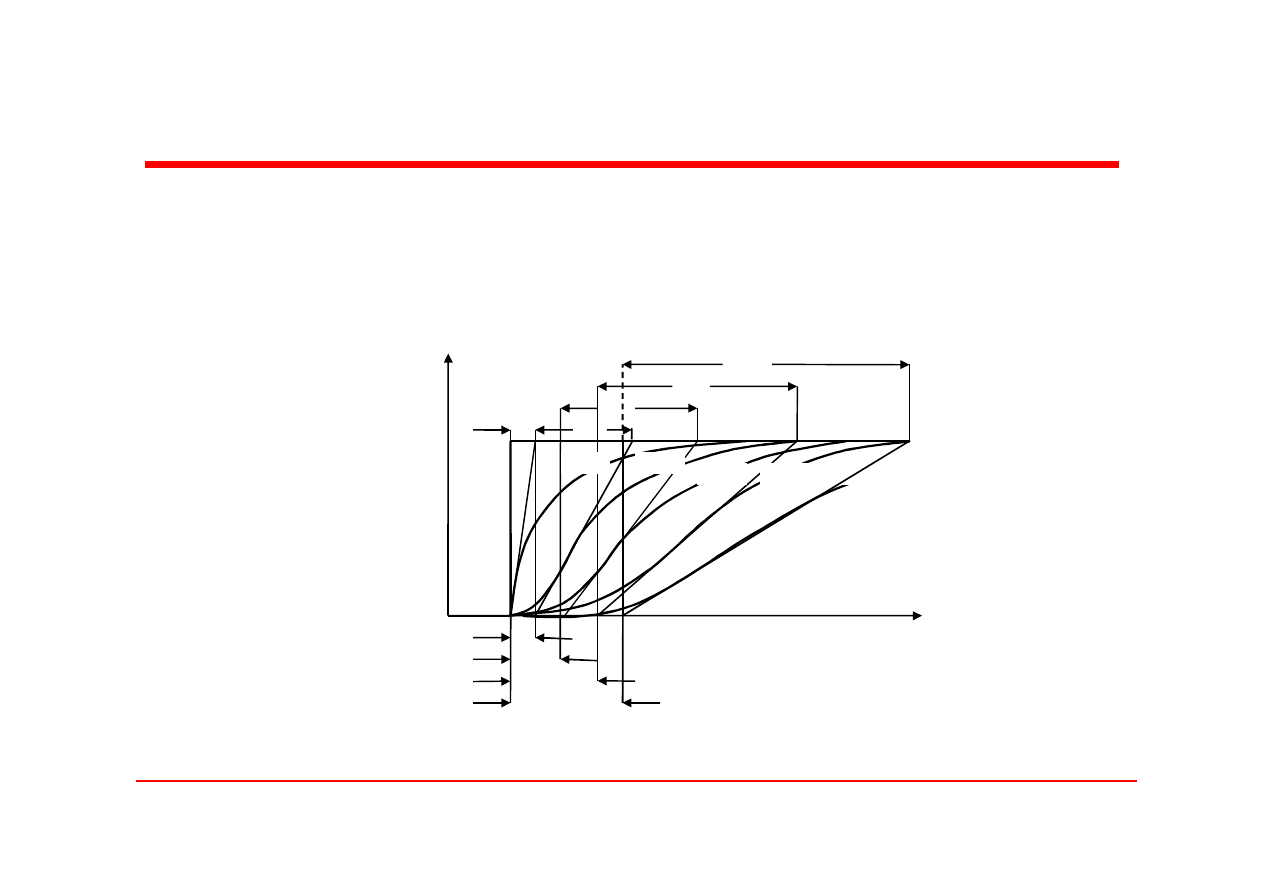
Obiekty inercyjne wy
ższego rzędu
Obiekty inercyjne wy
ższego rzędu
• Charakterystyki skokowe obiektów regulacji o ró
żnych
rz
ędach inercyjności
T
T
z2
T
z3
T
z4
T
z5
y
T
02
T
03
T
04
T
05
n=0
n=1
n=2
n=3
n=4
n=5
τ
Przydatno
ść znajomości charakterystyk
Przydatno
ść znajomości charakterystyk
dynamicznych obiektów regulacji
dynamicznych obiektów regulacji
• Uzyskane z wykresów charakterystyk skokowych
warto
ści stałych czasowych oraz
opó
źnień
obiektów regulacji s
ą wykorzystywane do:
• oceny stopnia trudno
ści regulacji,
• doboru typu regulatora
• optymalizacji jego nastaw dynamicznych.

Stopie
ń trudności regulacji obiektu
Stopie
ń trudności regulacji obiektu
Stopie
ń trudności regulacji S w zależności od typu obiektu
oblicza si
ę:
• obiekty inercyjne pierwszego rz
ędu z opóźnieniem
transportowym,
• obiekty inercyjne wy
ższego rzędu,
T
T
S
t
=
0
z
T
T
S
=
Stopie
ń trudności i regulacyjność
Stopie
ń trudności i regulacyjność
Stopie
ń trudności i regulacyjność obiektów regulacji przy
zastosowaniu regulatorów dwustanowych oraz regulatorów
typu P
• Stopie
ń trudności S
Regulacyjno
ść
≤
0.1 dobra
≈
0.2 zadowalaj
ąca
≥
0.3 z
ła
Dobór typu regulatora
Dobór typu regulatora
W zale
żności od wartości stopnia trudności S
obiektu regulacji zaleca si
ę wybór następującego
typu regulatora:
• S < 0,2 - regulator typu P lub dwustanowy,
• S = 0,2 do 0,3 - regulator typu PI, PD, PID,
• S > 0,3 - regulator PID, P-PI - kaskadowe
po
łączenie regulatora P (regulator główny – np. w
wentylacji:
t
W
) oraz regulatora PI (regulator
pomocniczy – np. w wentylacji :
t
N
).
Stopie
ń trudności regulacji obiektu
Stopie
ń trudności regulacji obiektu
Stopie
ń trudności regulacji obiektu można w sposób przybliżony
okre
ślić także w zależności od stopnia jego inercyjności n:
Dane niezb
ędne w projektowaniu układów automatycznej regulacji
uzyskiwane s
ą najczęściej na podstawie badań eksperymentalnych.
Przybli
żone wartości parametrów opisujących charakterystyki niektórych
obiektów regulacji mo
żna znaleźć także w literaturze z zakresu
automatyki.
10
1
−
=
n
S
Przyk
ładowe wartości stałych czasowych oraz stopnia trudności regulacji
Przyk
ładowe wartości stałych czasowych oraz stopnia trudności regulacji
Wielkość regulowana
Opóźnienie
zastępcze
T
0
Stopień trudności
regulacji
0
z
T
T
S
=
Temperatura wody w kotle
1÷5 min
0,05÷0,15
Ciąg kominowy
1÷3s
0,3÷1
Temperatura wody za zaworem mieszającym
5÷20s
0,2÷0,5
Temperatura powietrza w pomieszczeniu
3÷5 min
0,1÷0,3
Temperatura ciepłej wody za wymiennikiem
5÷30 s
0,1÷0,8
Temperatura wody basenowej:
- zasilanie
- powrót
10÷60 s
6÷8 h
0,1÷0,3
Temperatura na wyjściu z wymiennika c.o.
10÷60 s
0,1÷ 0,6
Temperatura
powietrza
za
układem
przepustnic mieszających
1 s
0,3÷0,8
Temperatura powietrza nawiewanego
15 s ÷ 4 min
O,2÷0,6
Temperatura powietrza w wentylowanym
pomieszczeniu
0,5÷3 min
0,1÷ 0,3
Temperatura powietrza wywiewanego
0,5÷ 3 min
0,2÷0,4
Wilgotność powietrza w pomieszczeniu
0,5÷ 3 min
0,2÷0,5
Strumień powietrza
< 1 s
0,1÷ 0,5
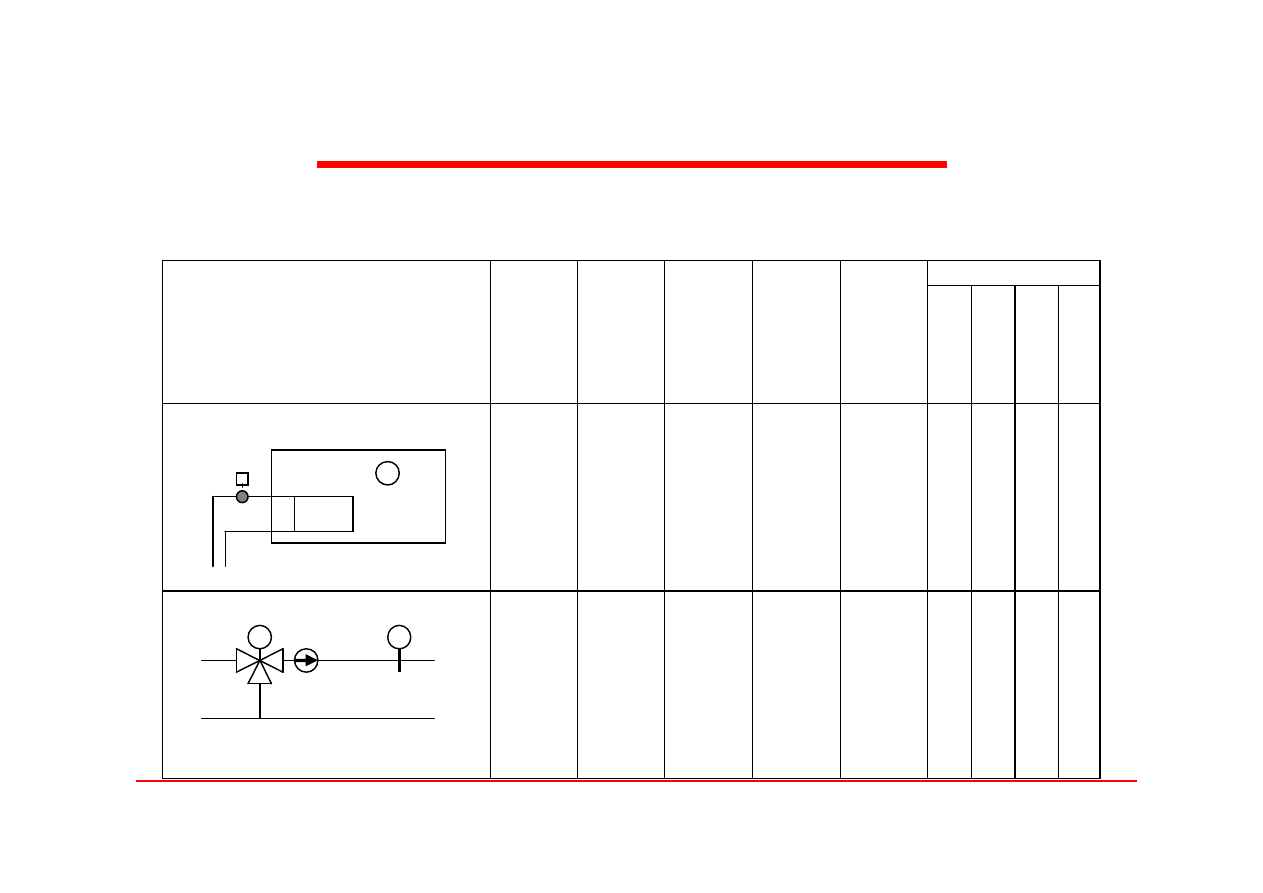
Dobór typu regulatora
Dobór typu regulatora
Tabela 2.4 Przybliżone parametry charakterystyki obiektu regulacji i zalecane typy
regulatorów (S – zalecane, Sw – stosowane warunkowo, 0- nie stosowane) wg. [1], [3].
Regulator
Wielkość regulowana
Obiekt regulacji
Czas
opóź-
nienia
T
0
Zastę-
pcza
stała
czasowa
T
z
Stopień
trud-
ności
regulacji
S
Zakres
propor-
cjonal-
ności
X
h
Współ-
czynnik
wzmoc-
nienia
K
D
w
u
st
an
o
w
y
P
I
PI
5 – 15
min
1 – 2,5
h
0,05–0,2 20 – 30
K
0,2 – 0,3
K/%
S
S
0
Sw
10 – 20
s
30 – 60
s
0,2 –0,4 20 – 80
K
0,2 – 0,8
K/%
0
Sw Sw
S
y
T
Temperatura wewn
ętrzna
T
y
Temperatura wody zasilaj
ącej
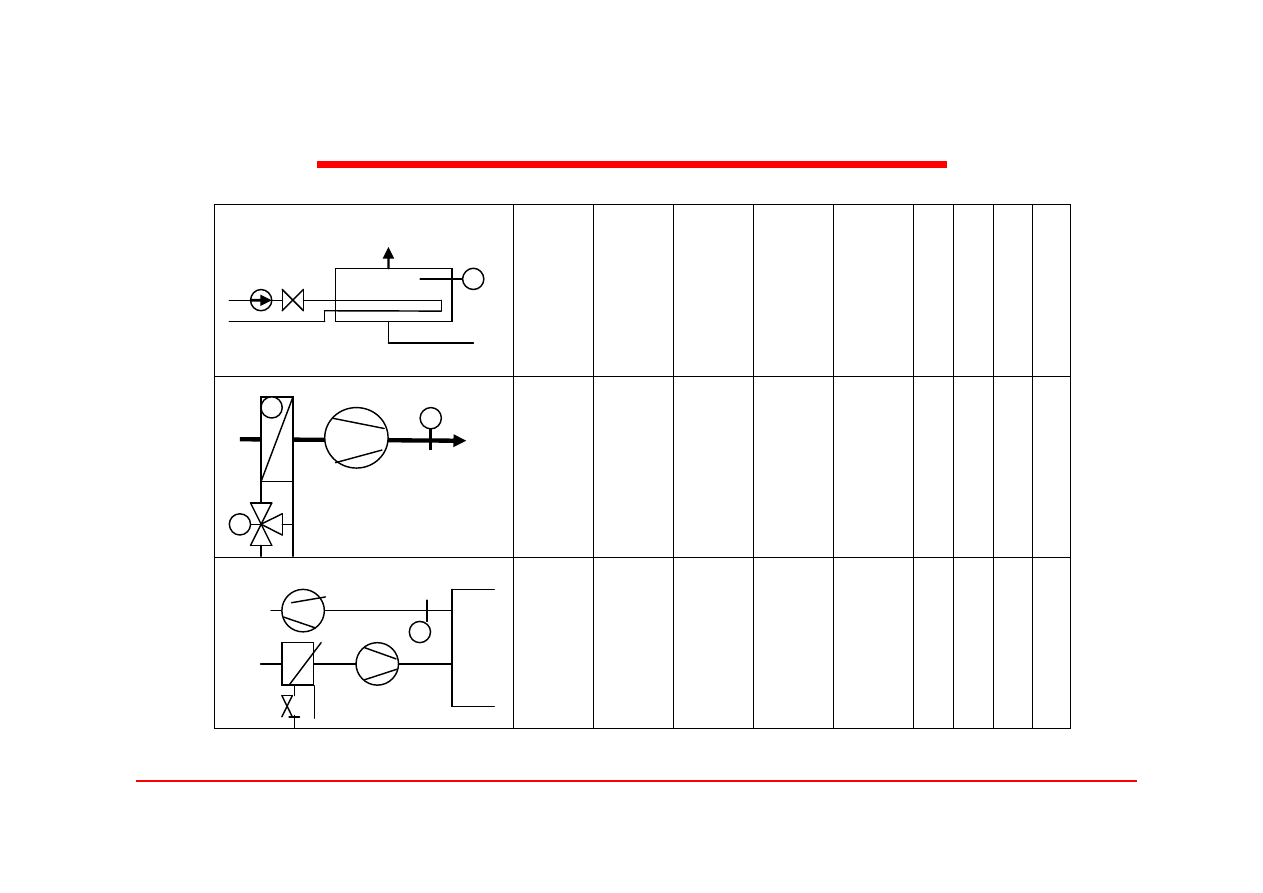
Dobór typu regulatora
Dobór typu regulatora
0,5 – 2
min
10 – 30
min
0,05–0,2 30 – 60
K
0,3 – 0,6
K/%
S
S
0
Sw
10 – 40
s
30 – 120
s
0,15-0,4 20 – 50
K
0,2 – 0,5
K/%
0
S
Sw
S
1 – 5
min
10 – 60
min
0,1 – 0,3 15 – 25
K
0,15-0,25
K/%
0
S
0
S
Temperatura ciep
łej wody
T
y
T
T
Temperatura nawiewu
y
Temperatura wywiewu
+
T
y
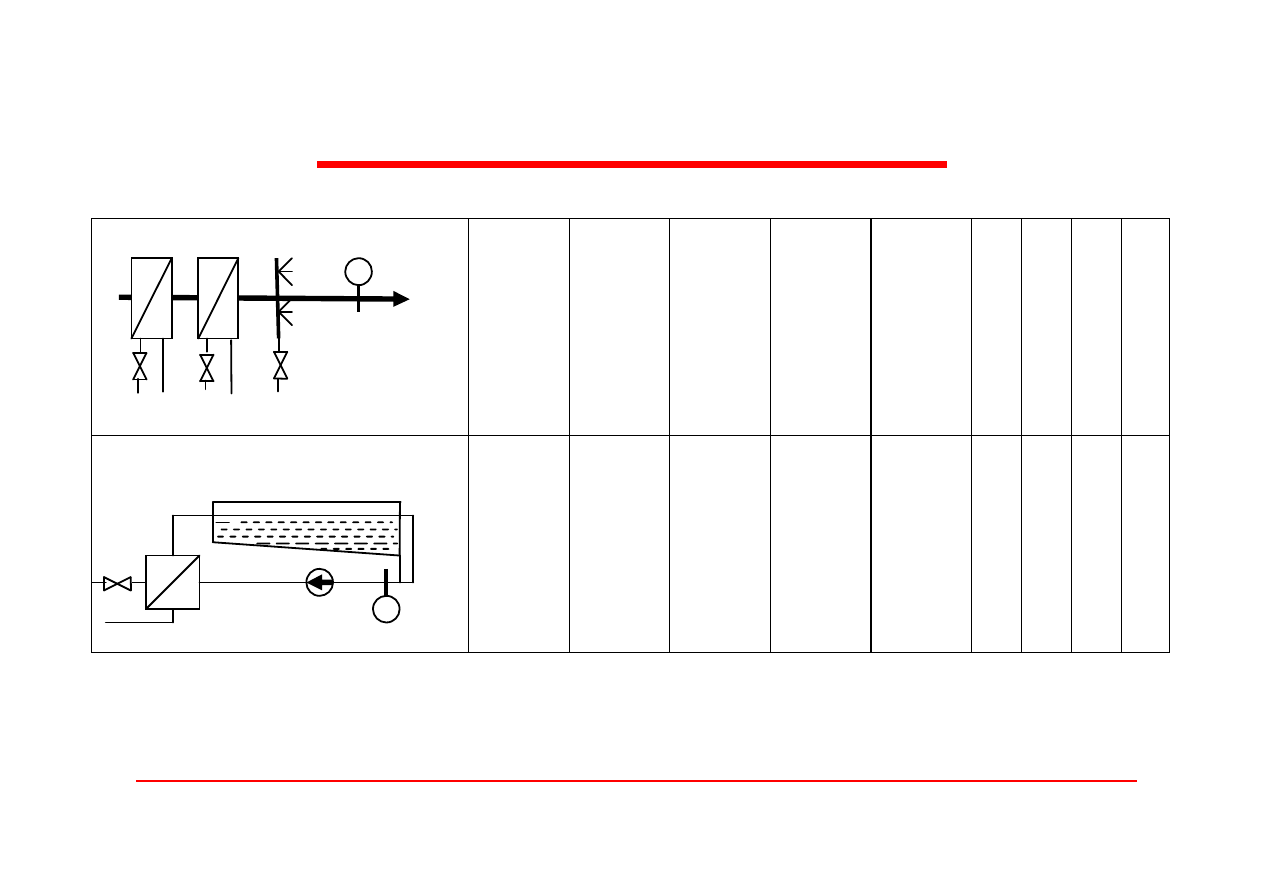
Dobór typu regulatora
Dobór typu regulatora
0,5 – 1,5
min
2 – 10
min
0,15-0,4 15 – 25
K
0,15-0,25
K/%
0
Sw
0
S
20 – 50
min
10 – 40
h
0,02-0,1 10 – 25
K
0,1-0,25
K/%
S
S
0
0
+
-
T
y
Temperatura wody basenowej
T
y
Temperatura punktu rosy
Wniosek ko
ńcowy
Wniosek ko
ńcowy
• Jak wynika z powy
ższej tabeli dla większości
obiektów regulacji w systemach ogrzewania i
klimatyzacji
warto
ść stopnia trudności regulacji
mie
ści się w przedziale od 0,02 do 0,4. Dlatego
najcz
ęściej do automatyzacji tych systemów są
stosowane regulatory typu PI,
P oraz regulatory
dwustanowe.
KONIEC
KONIEC
Wyszukiwarka
Podobne podstrony:
Podstawy Automatyki Egzamin pyt Nieznany
015 podstawy automatyzacji fl N Nieznany (2)
Podstawy automatyki id 366718 Nieznany
Podstawy automatyki 08 02 2015 Nieznany
podstawy automatyki Dobor nast Nieznany
Podstawy Automatyki Egzamin pyt Nieznany
FESTO Podstawy automatyzacji
12 Podstawy automatyki Układy sterowania logicznego
podstawy automatyki ćwiczenia lista nr 4b
Podstawy automatyki cz1
matematyka podstawowe wzory i Nieznany
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy au
Podstawy automatyki 2
więcej podobnych podstron