SPRAWOZDANIE Z LABORATORIUM – NAPĘDY ELEKTRYCZNE
AGH
WIMIR
KTL
Nazwisko, Imię
1. Pawiński Stefan
2. Pawlikowski Michał
3. Pawłowski Andrzej
Rok
2B
Grupa
7
Zespół
1
NR ĆWICZENIA:
2
Data wykonywania ćwiczenia
06.12.2010
ZALICZENIE
TEMAT ĆWICZENIA:
Analiza kinematyczna napędu z przekładniami
Termin
1.
2.
3.
Data
Ocena

1. Schemat stanowiska pomiarowego
Dane do opracowania wyników:
Ś
rednica tarczy tachometru
d
tacho
= 31,5 mm
Ś
rednica rolki
d
r
= 125 mm
Promień pomiędzy osią rolki, a miejscem styku liny r
rolki
= 48 mm
Ś
rednica liny
d
liny
= 18mm
Liczba znaczników na tarczy koła pasowego 1
k
kp1
= 4
Liczba znaczników na tarczy rolki
k
r
= 4
Liczba znaczników na tarczy koła linowego
k
kl
= 8
Ś
rednica koła pasowego 1
D
kp1
= 125 mm
Ś
rednica koła pasowego 2
D
kp2
= 250 mm
Ś
rednica zewnętrzna koła linowego
D
kl zew
= 350 mm
Ś
rednica wewnętrzna koła linowego
D
kl wew
= 302 mm
Ś
rednica dolnej krawędzi rowka w kole linowym D
kl
= 302 mm
Ś
rednica koła zębatego 1
D
z1
= 85
Ś
rednica koła zębatego 2
D
z2
= 315
Ś
rednica koła zębatego 3
D
z3
= 315
Wzór do obliczenia prędkości obrotowej podczas pomiaru optycznego:
x
pom
k
n
n
=
, gdzie k
x
liczna znaczników na tarczy
Wzmóc do obliczenia prędkości obrotowej podczas pomiaru stykowego
x
t
pom
D
D
n
n
⋅
=
, gdzie D
t
– średnica tarczy tachometru
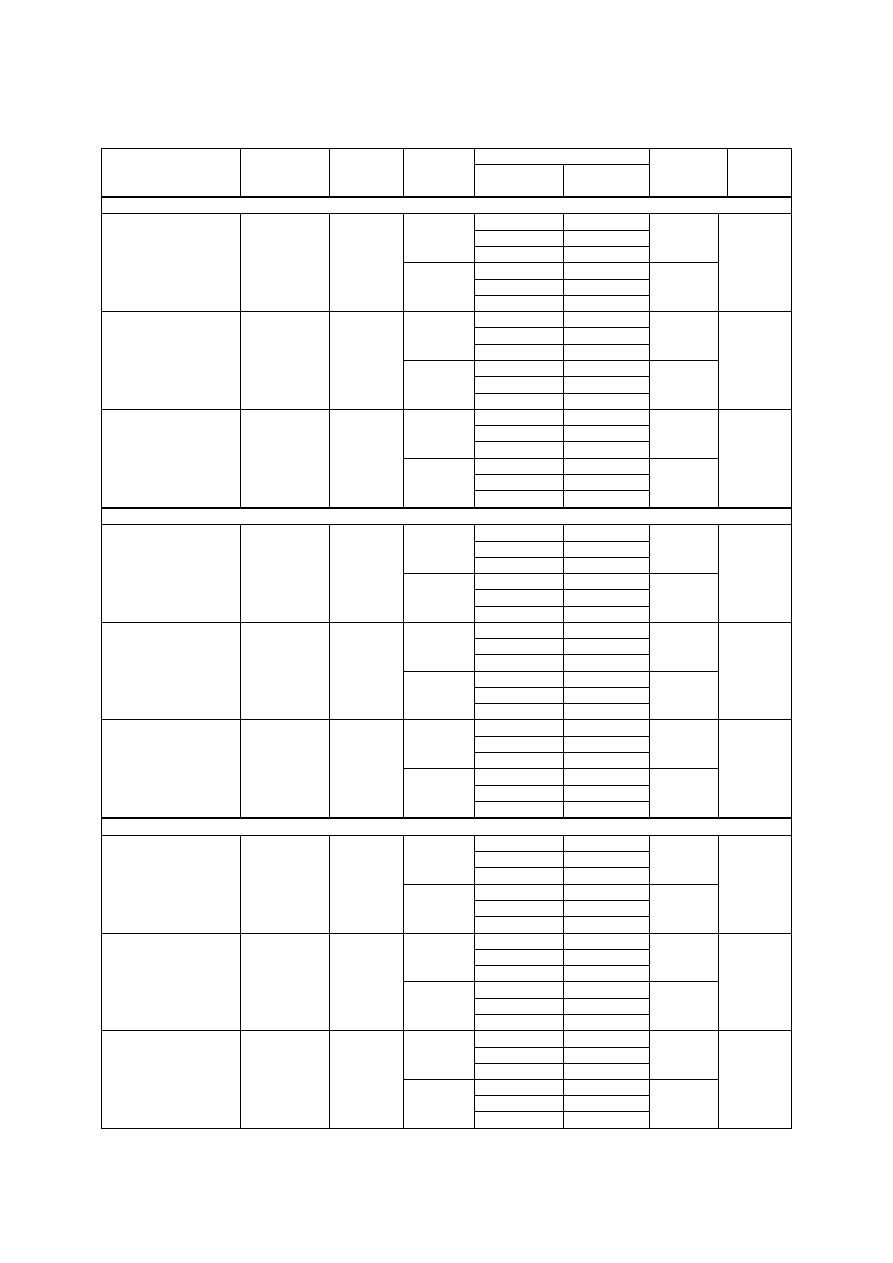
2. Pomiary:
Pomiar cz
ą
stkowy
Wielko
ść
mierzona
Oznaczenie
Jednostki
Metoda
pomiaru
Warto
ść
mierzona
Warto
ść
przeliczona
Ś
redna dla
danej
metody
Ś
rednia
obydwu
metod
Pr
ę
dko
ść
zadana liny V
l
= 0,3 m/s
432,0
108,0
437,0
109,3
Metoda
optyczna
440,0
110,0
109,1
460,8
107,2
462,2
107,5
Pr
ę
dko
ść
obrotowa
Koła pasowego 1
N
kp1
[obr/min]
Metoda
stykowa
463,1
107,7
107
108,5
125,7
15,7
120,2
15,0
Metoda
optyczna
126,0
15,8
15,5
175,0
15,4
176,3
15,5
Pr
ę
dko
ść
obrotowa
koła linowego
n
kl
[obr/min]
Metoda
stykowa
174,9
15,3
15,4
15,45
184,1
46,0
185,0
46,3
Metoda
optyczna
181,0
45,3
46,2
184,1
46,5
182,1
46,0
Pr
ę
dko
ść
obrotowa
rolki
n
r
[obr/min]
Metoda
stykowa
179,1
45,2
45,9
46,05
Pr
ę
dko
ść
zadana liny V
l
= 0,6 m/s
868,5
217,1
861,3
215,3
Metoda
optyczna
869,8
217,4
216,6
926,7
215,5
927,6
215,7
Pr
ę
dko
ść
obrotowa
Koła pasowego 1
N
kp1
[obr/min]
Metoda
stykowa
928,0
215,8
215,7
216,15
244,0
30,5
249,0
31,1
Metoda
optyczna
254,3
31,8
31,1
348,7
30,6
350,0
30,7
Pr
ę
dko
ść
obrotowa
koła linowego
n
kl
[obr/min]
Metoda
stykowa
349,4
30,6
30,6
30,9
369,4
92,4
370,0
92,5
Metoda
optyczna
365,8
91,5
92,1
363,1
91,7
365,7
92,3
Pr
ę
dko
ść
obrotowa
rolki
n
r
[obr/min]
Metoda
stykowa
362,5
91,5
91,8
91,9
Pr
ę
dko
ść
zadana liny V
l
= 0,9 m/s
1290,0
322,5
1287,0
321,75
Metoda
optyczna
1285,0
321,3
321,85
1383,0
321,6
1381,0
321,2
Pr
ę
dko
ść
obrotowa
Koła pasowego 1
N
kp1
[obr/min]
Metoda
stykowa
1578,0
320,5
321,1
321,5
359,0
44,9
363,2
54,4
Metoda
optyczna
375,8
47,0
45,8
520,3
45,6
521,2
45,7
Pr
ę
dko
ść
obrotowa
koła linowego
n
kl
[obr/min]
Metoda
stykowa
522,3
45,8
45,7
45,75
545,6
136,4
547,1
136,8
Metoda
optyczna
554,7
138,7
137,3
533,9
134,8
537,4
135,7
Pr
ę
dko
ść
obrotowa
rolki
n
r
[obr/min]
Metoda
stykowa
536,4
135,5
135,3
136,3
3. Obliczenia
Przykładowe obliczenia dla v=0,3 m/s
Prędkość kątowa silnika:
3
,
11
5
,
108
30
30
1
1
=
⋅
Π
=
Π
=
kp
kp
n
ω
1/s
Przełożenie przekładni pasowej:
2
125
250
1
2
2
1
12
=
=
=
=
kp
kp
kp
kp
p
D
D
i
ω
ω
Prędkość kątowa koła pasowego 2:
65
,
5
2
3
,
11
12
1
2
=
=
=
p
kp
kp
i
ω
ω
1/s
Prędkość kątowa koła zębatego 1:
65
,
5
2
1
=
=
kp
z
ω
ω
1/s (Bo znajdują się na tym samym wale)
Przełożenie pomiędzy kołem zębatym 1,a kołem zębatym 2:
7
,
3
85
315
1
2
1
2
1
2
2
1
12
=
=
=
=
=
=
p
p
p
p
z
z
z
d
d
d
m
d
m
z
z
i
o
o
ω
ω
Prędkość kątowa koła zębatego 2:
53
,
1
7
,
3
65
,
5
12
1
2
=
=
=
z
z
z
i
ω
ω
1/s
Prędkość kątowa koła zębatego 3:
2
3
z
z
ω
ω
=
= 1,53 1/s (i=1, bo z
2
=z
3
)
Prędkość kątowa koła linowego:
kl
z
ω
ω
=
3
(bo znajdują się na tym samym wale)
Obroty koła linowego:
6
,
14
53
,
1
30
30
=
⋅
Π
=
Π
=
kl
kl
n
ω
Obr/min
Promień pomiędzy środkiem liny, a osią koła linowego:
16
,
0
2
018
,
0
302
,
0
2
=
+
=
+
=
l
kl
d
D
R
Prędkość liniowa liny:
2448
,
0
16
,
0
53
,
1
=
⋅
=
=
R
v
kl
kl
ω
m/s
Prędkość kątowa rolki:
82
,
4
05
,
46
30
30
=
⋅
Π
=
⋅
Π
=
r
r
n
ω
1/s
Prędkość liniowa liny:
23
,
0
=
⋅
=
rolki
r
l
r
v
ω
m/s
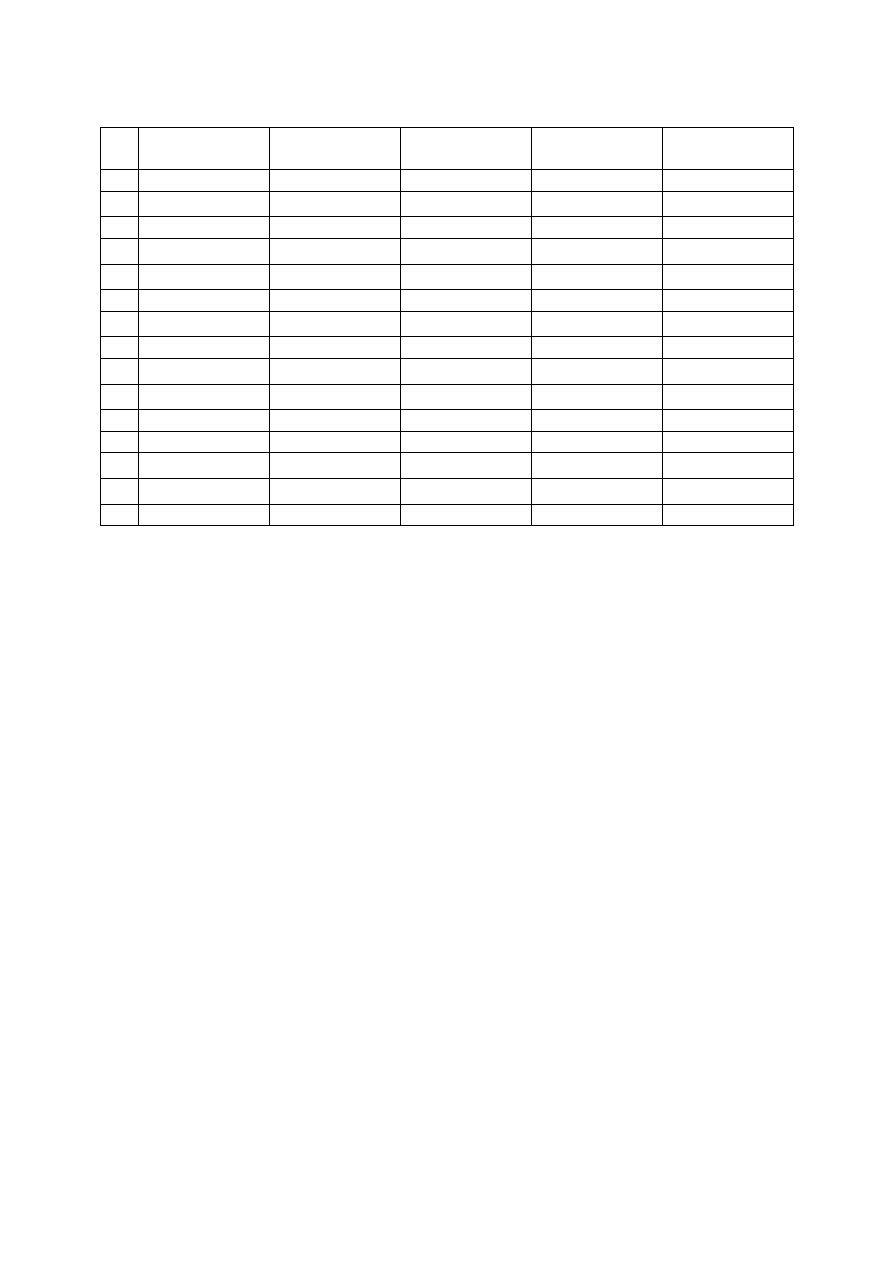
4. Wyniki
Lp
Parametr
Jednostka
Wariant 1
v
l
= 0,3 m/s
Wariant 2
V
l
= 0,6 m/s
Wariant 3
V
l
= 0,9 m/s
1
n
kp1
[obr/min]
108,05
216,1
321,5
2
w
kp1
[1/s]
11,3
22,6
33,7
3
i
p12
[-]
2
2
2
4
w
kp2
[1/s]
5,65
11,3
16,85
5
w
z1
[1/s]
5,65
11,3
16,85
6
i
z12
[-]
3,7
3,7
3,7
7
w
z2
[1/s]
1,53
3
4,55
8
i
z23
[-]
1
1
1
9
w
z3
[1/s]
1,53
3
4,55
10
w
kl
[1/s]
1,53
3
4,55
11
n
kl
[obr/min]
14,6
28,6
43,45
12
n
kl
pomiar
[obr/min]
15,45
30,9
45,75
13
v
l
= w
kl
* R
[m/s]
0,24
0,48
0,73
14
v
l
= w
r
*r
[m/s]
0,23
0,46
0,69
15
v
l
zadane
[m/s]
0,3
0,6
0,9
5. Wnioski:
Obliczenia teoretyczne potwierdzają poprawny przebieg pomiarów. Można jednak zauważyć
pewne niedokładności, które wynikają głównie z błędów przy dokonywaniu pomiarów, takich
jak drgania związane z ręcznym pomiarem optycznym, niedokładności w umieszczeniu
wskaźników na tarczach elementów obrotowych, błąd odczytu wartości czy też zbyt mała
liczba pomiarów. Na błędy pomiarów mogą mieć wpływ czynniki związane z samym
urządzeniem, na którym dokonywany był pomiar - niedokładność urządzenia zadającego
prędkość liniową liny, zużycie przekładni pasowej lub zmiana naprężenia liny.
Wyszukiwarka
Podobne podstrony:
Analiza kinematyczna napędu z przekładniami
Sprawozdanie Analiza kinematyczna przekładni pasowej wer 2
04 Analiza kinematyczna manipulatorów robotów metodą macierz
1 Analiza kinematyczna manipula Nieznany (2)
05 analiza stat www przeklej pl Nieznany
05 Analiza kinematyczna mechanizmów wyznaczanie prędkości i przyśpieszeń
Analiza kinematyczna i kinetostatyczna mechanizmu dźwigniowego
Analiza kinematyczna kratownic płaskich
Analiza kinematyczna ram plaski Nieznany (2)
charakterystyka ukladow kinematycznych napedu i sterowania obrabiarek ogolnego przeznaczenia druk la
w3 Kinematyczne własności przekładni (zasada zazębienia, linia przyporu)
ANALIZA KINEMATYCZNA MECHANIZMOW KRZYWKOWYCH v2011
Analiza kinematyczna płaskich układów prętowych
więcej podobnych podstron