Politechnika Świętokrzyska
Metody obliczeniowe
A143.
Grupa: 3ID12B
Piotr Chebdowski
1. Teoria
Metoda najmniejszych kwadratów – standardowa metoda przybliżania rozwiązao układów
nadokreślonych, tzn. zestawu równao, w którym jest ich więcej niż zmiennych. Nazwa „najmniejsze
kwadraty” oznacza, że koocowe rozwiązanie tą metodą minimalizuje sumę kwadratów błędów przy
rozwiązywaniu każdego z równao.
W statystyce wykorzystuje się ją do estymacji i wyznaczania linii trendu na podstawie zbioru danych
w postaci par liczb. Najczęściej jest stosowana przy regresji liniowej, ale może też byd stosowana do
statystycznego wyznaczania parametrów nieliniowych linii trendu.
Regresja liniowa
Żądamy minimalizacji funkcji χ2, która mierzy odchylenie zadanej zależności funkcyjnej od punktów
doświadczalnych. W przypadku funkcji liniowej f(x) = ax + b, funkcja χ2 sprowadza się do
gdzie σ
i
to odchylenie standardowe (niepewnośd pomiaru) danego punktu pomiarowego (w zmiennej
y); czasami używa się notacji Aby znaleźd minima tej funkcji ze względu na parametry a i b,
różniczkuje się po a i b i przyrównuje do 0:
Można te warunki przepisad w wygodniejszej do liczenia postaci, wprowadzając następujące
wielkości
Równania powyższe przepisane w nowych zmiennych po uporządkowaniu mają postad
aS
x
+ bS = S
y
,
aS
xx
+ bS
x
= S
xy
.
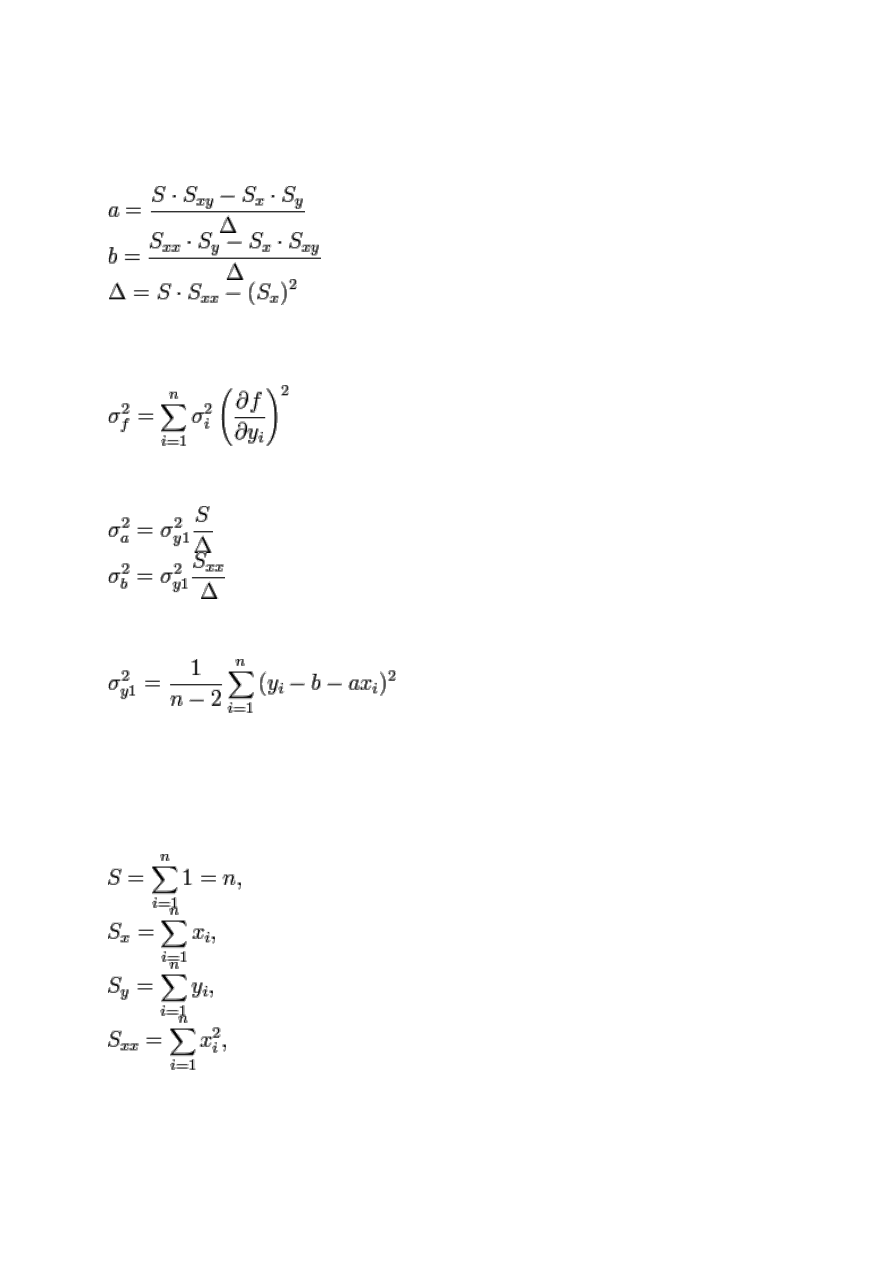
Rozwiązaniem tego układu równao liniowych jest
W celu obliczenia niepewności uzyskanych wartości współczynników a i b, korzysta się ze wzoru na
błąd pośredni (różniczka zupełna) funkcji zależnej od parametrów f(yi) (a(yi),b(yi)), przyjmując, że
niepewnośd pomiarowa wynika tylko z niepewności zmiennej y.
Po zastosowaniu tego wzoru do współczynników a i b (czyli obliczeniu pochodnych, podniesieniu do
kwadratu) uzyskuje się wzór na niepewności
Gdzie to odchylenie standardowe zmiennej y (dla jednego pomiaru), które może byd oszacowane na
podstawie odchyleo punktów od prostej.
Przypadek klasyczny
Gdy odchylenie standardowe (niepewnośd pomiaru) wszystkich punktów pomiarowych jest
jednakowe, regresję nazywa się regresją nieważoną (klasyczną lub pierwszego rodzaju), wówczas
odchylenie standardowe może byd wyłączone przed znak sumowania i upraszcza się we wzorach na
współczynniki a, b i inne parametry regresji.
Przyjmując oznaczenia:
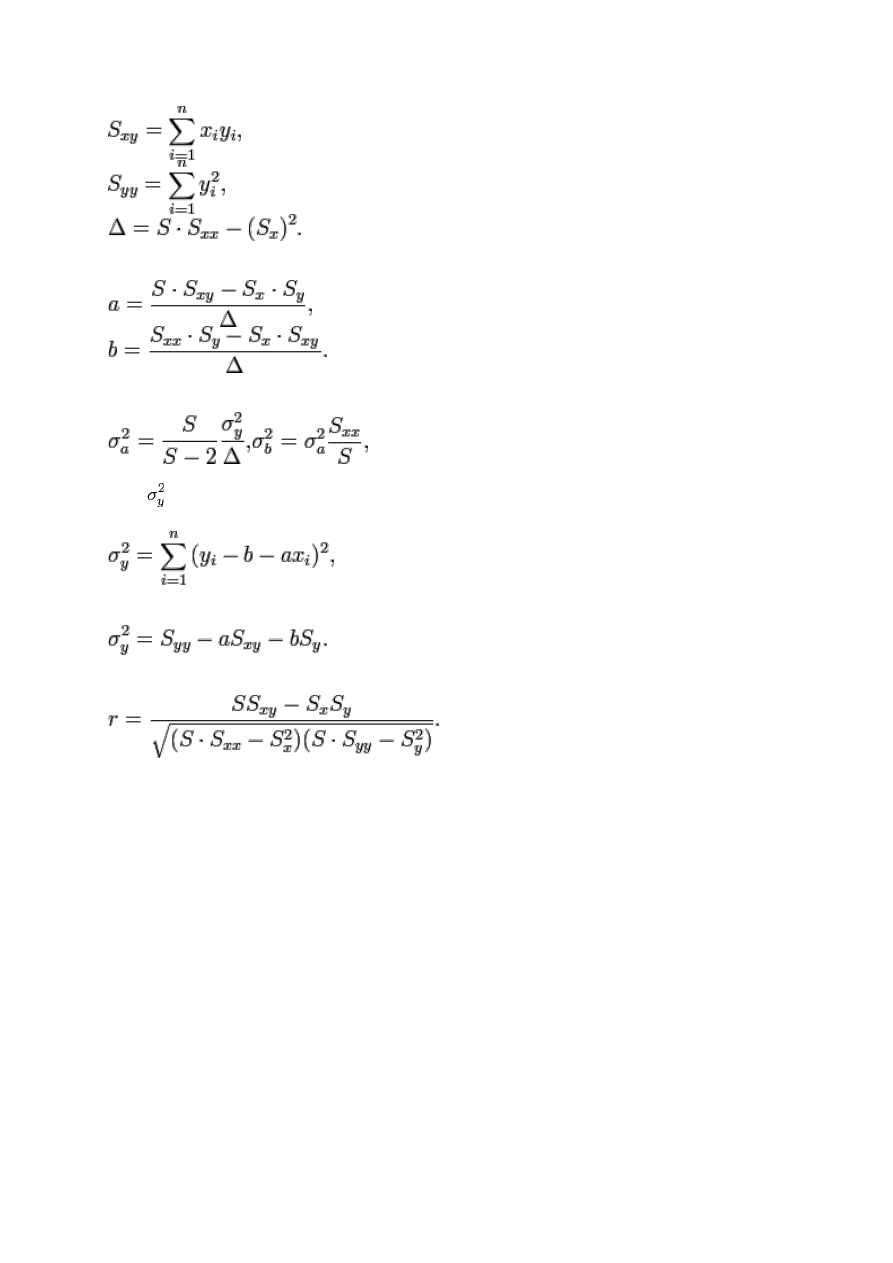
Współczynniki prostej określają wzory:
Odchylenie standardowe dane jest za pomocą wzorów:
gdzie
to suma odchyleo standardowych wszystkich pomiarów określona na podstawie analizy
niepewności pomiarowej lub kwadratów odchyleo punktów od prostej regresji,
lub w postaci sum,
Współczynnik korelacji liniowej Pearsona określa wzór:
Współczynnik, którego wartośd mieści się w zakresie od –1 do 1 włącznie, jest bezwymiarowym
wskaźnikiem odzwierciedlającym stopieo liniowej zależności pomiędzy dwoma zbiorami danych.
Wartości –1 i 1 odpowiadają idealnemu ułożeniu punktów na prostej, 0 oznacza brak korelacji między
zmiennymi.
2. Program
public
class
Aproksymacja {
public
static
void
main(String[] args) {
double
S0 = 0, S1 = 0, S2 = 0, T0 = 0, T1 = 0, a0 = 0, a1 = 0;
double
[][] t =
new
double
[8][2];
t[0][0] = -5.84;
t[0][1] = -0.07;
t[1][0] = -5.3;
t[1][1] = -0.11;
t[2][0] = -4.76;
t[2][1] = -0.13;
t[3][0] = -4.22;
t[3][1] = -0.16;
t[4][0] = -3.68;
t[4][1] = -0.19;
t[5][0] = -3.14;
t[5][1] = -0.26;
t[6][0] = -2.6;
t[6][1] = -0.39;
t[7][0] = -2.06;
t[7][1] = -0.81;
S0 = t.
length
;
for
(
int
i = 0; i < t.
length
; i++) {
S1 += t[i][0];
S2 += Math.pow(t[i][0], 2);
T0 += t[i][1];
T1 += t[i][0] * t[i][1];
}
System.
out
.printf(
"S0: %f, S1:%f, S2:%f, T0: %f, T1: %f"
, S0, S1, S2,
T0, T1);
System.
out
.println(
"\nRównania:\nS0*a0 + S1*a1 = T0\nS1*a0 + S2*a1 =
T1"
);
a1 = ((T1 * S0) / (-(S1 * S1) + S0 * S2))
- ((S1 * T0) / (-(S1 * S1) + S0 * S2));
a0 = (T0 / S0) - ((S1 * a1) / S0);
System.
out
.println(
"a0 ="
+ a0 +
", a1 ="
+ a1);
System.
out
.printf(
"f(x) = %f + %f * x"
, a0, a1);
}
}
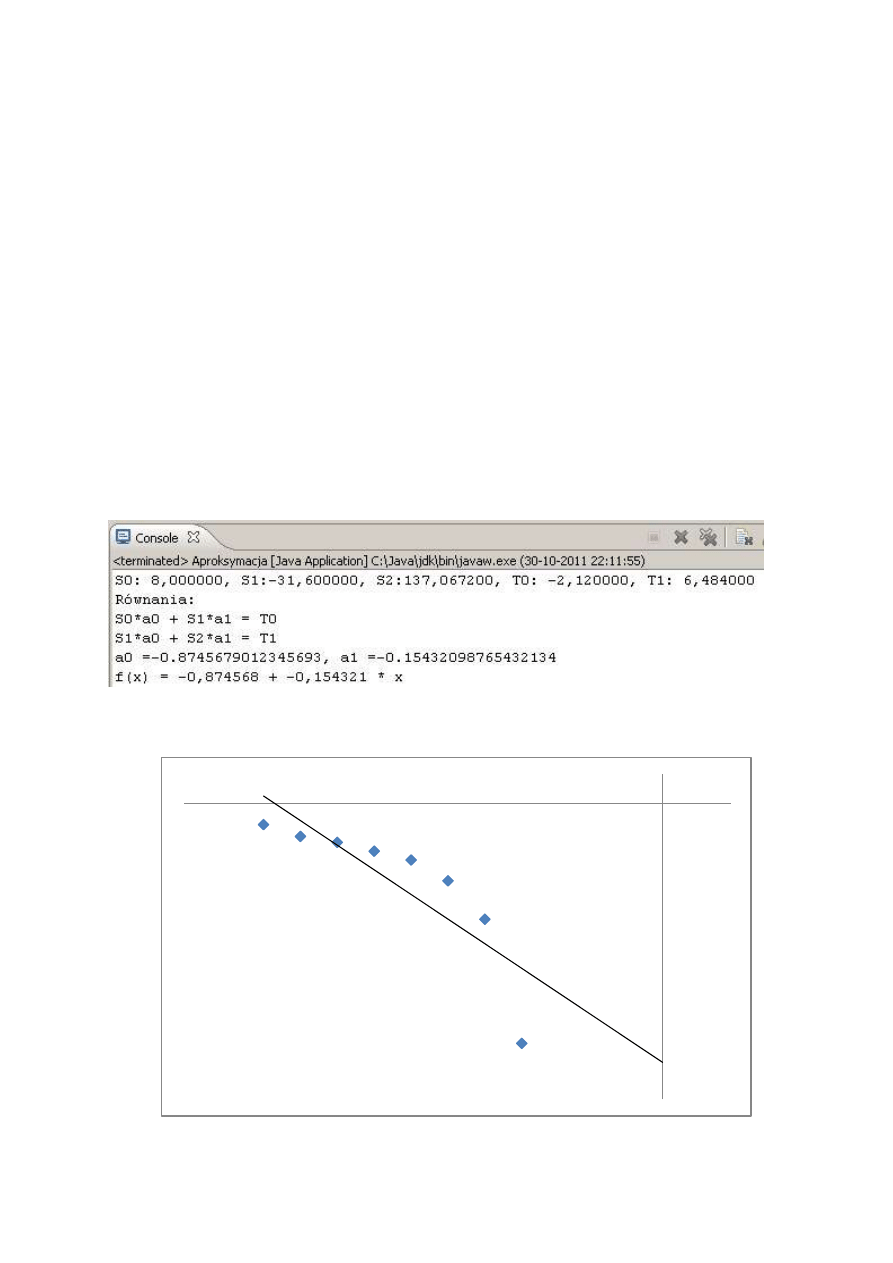
3. Konsola
4. Wykres
-1
-0,9
-0,8
-0,7
-0,6
-0,5
-0,4
-0,3
-0,2
-0,1
0
0,1
-7
-6
-5
-4
-3
-2
-1
0
1
Wyszukiwarka
Podobne podstrony:
metobl 312B lab7 U15 Chebdowski
metobl 312B lab5 C121 Chebdowski
metobl 312B lab6 scilab Chebdowski
metobl 312B lab9 W27 Chebdowski
lab3
lab3 kalorymetria
Instrukcja Lab3
lab3 6
lab3
sprawko z lab3 z auto by pawelekm
Lab3 zadanie 2 schemat organizacyjny
Lab3 KWW KT
Podstawy Robotyki lab3 id 36832 Nieznany
Architekrura Systemów Lab3
Lab3 Cpp GPS opis
AKiSO lab3 id 53767 Nieznany
więcej podobnych podstron