LABORATORIUM PODSTAW AUTOMATYKI
ĆWICZENIE 4
DOBÓR NASTAW REGULATORÓW
R E G U L A T O R Y
Rodzaje regulatorów i ich klasyfikacja
Regulatory można klasyfikować według różnych kryteriów.
Klasyfikacja regulatorów ze względu na :
1. sposób budowy
2. rodzaj nośnika energii użytego do zasilania wzmacniacza regulatora
3. sposób zmiany wielkości nastawiającej (ciągły lub nieciągły)
4. postać transmitancji operatorowej regulatora
Ze względu na sposób budowy regulatory dzielimy na dwie następujące grupy :
1. regulatory nie korzystające z energii pomocniczej (o działaniu bezpośrednim)
2. regulatory z energią pomocniczą (o działaniu pośrednim)
Regulatory z energią pomocniczą dzielimy ze względu na rodzaj nośnika energii , użytego
do zasilania wzmacniacza regulatora , na :
1. regulatory elektryczne
2. regulatory pneumatyczne
3. regulatory hydrauliczne
Ze względu na sposób zmiany wielkości nastawiającej (ciągły lub nieciągły) regulatory z
energią pomocniczą dzielimy na :
1. regulatory o wyjściu ciągłym
2. regulatory impulsowe
3. regulatory dwupołożeniowe
Regulator o wyjściu ciągłym w sposób ciągły oddziaływuje na obiekt za pomocą
wielkości nastawiającej. Regulator impulsowy oddziaływuje na obiekt tylko w pewnych ,
powtarzających się okresowo , chwilach czasowych zwanych chwilami impulsowania. W
regulatorach dwupołożeniowych wielkość nastawiająca może przyjmować tylko dwie różne
wartości (odpowiadające np. włączeniu i wyłączeniu grzejnika w termostacie).
Ze względu na postać transmitancji operatorowej
G
r
(s) =
Y(s)
E(s)
•
Y(s) – transformata wielkości nastawiającej (sterującej) y(t)
•
E(s) – transformata uchybu regulacji e(t)
Do regulatorów liniowych zaliczamy :
1. regulatory proporcjonalne typu P
G
r
(s) = K
p
2. regulatory całkowe I
G
r
(s) =
1
sT
i
3. regulatory proporcjonalno-całkowe określane jako regulatory PI
G
r
(s) = K
p
(1+
1
sT
i
)
4. regulatory proporcjonalno-różniczkowe oznaczane PD
G
r
(s) = K
p
(1 + T
d
s)
5. regulatory proporcjonalno-całkowo-różniczkowe PID
G
r
(s) = K
p
(1+
1
sT
i
+ T
d
s)
przy czym : K
p
, T
i
, T
d
są współczynnikami dającymi się nastawiać w danym regulatorze w pewnym
ograniczonym zakresie.
Regulator proporcjonalny
Regulatorem proporcjonalnym nazywamy regulator o transmitancji operatorowej
G
r
(s) = K
p
czyli regulator, dla którego zależność między uchybem regulacji e(t)a zadanym sygnałem
sterującym u(t) ma postać
u(t) = K
p
e(t)
gdzie :
•
K
p
– współczynnik wzmocnienia
•
P =
1
K
p
- stały współczynnik nazywany zwykle zakresem proporcjonalności
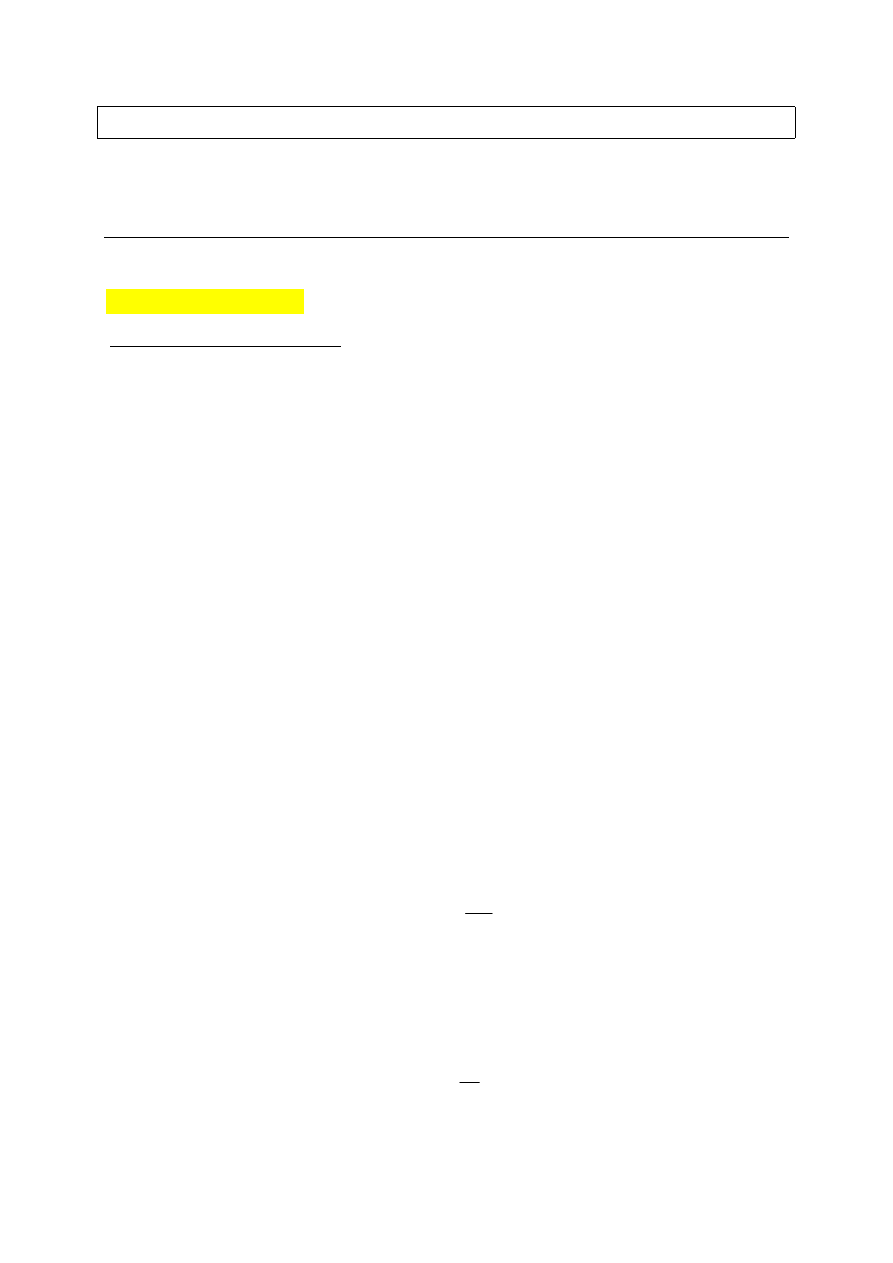
Regulator P jest członem bezinercyjnym (proporcjonalnym , wzmacniającym).
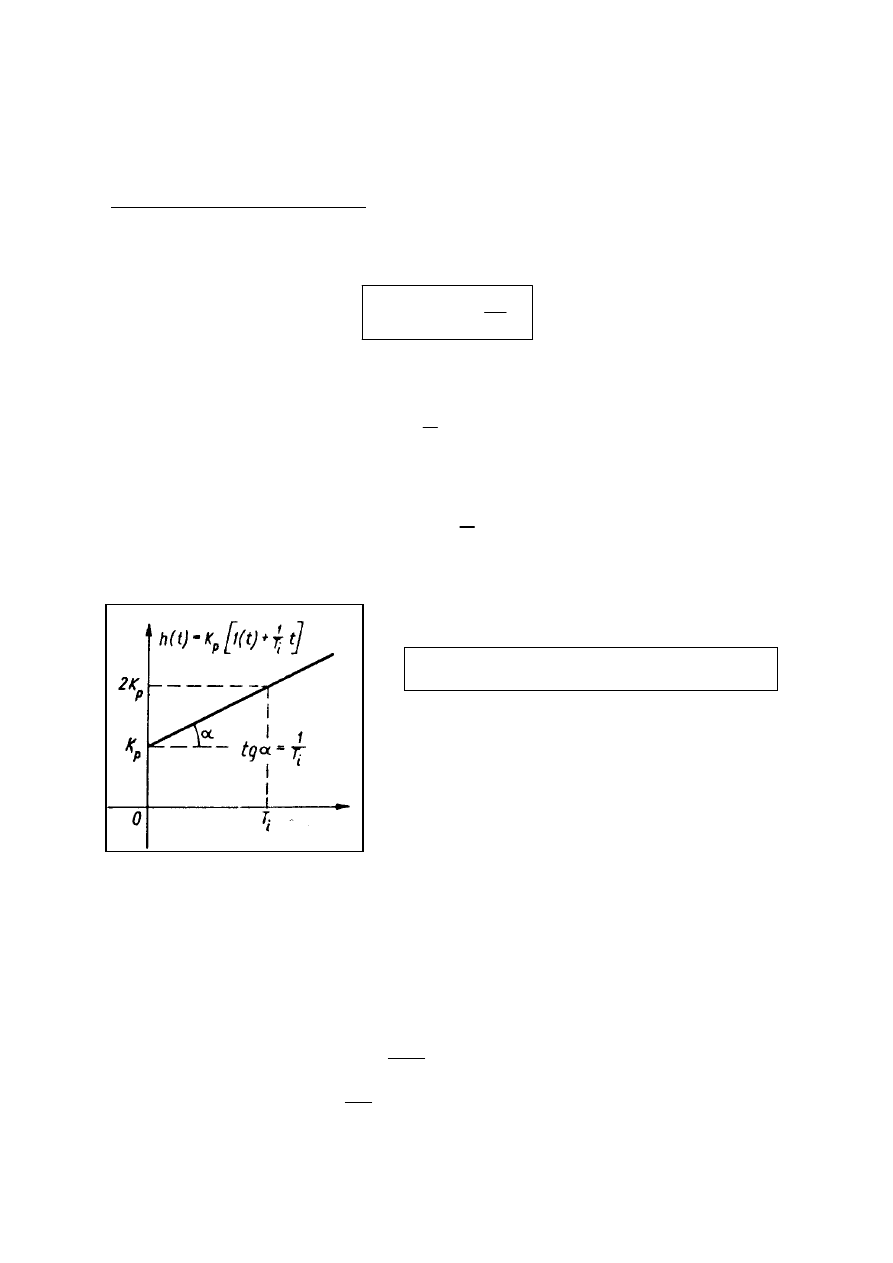
Charakterystyka skokowa h(t) regulatora P , określona jako odpowiedź na wymuszenie w
postaci skoku jednostkowego , ma zatem postać
h(t) = K
p
1(t) (2)
Przebieg charakterystyki skokowej regulatora P przedstawia rys. 1
Z zależności (1) mamy :
G
r
(j
ω
) = G
r
(s) s =j
ω
(3)
K
p
= P
r
(
ω
) + jQ
r
(
ω
) (4)
przy czym : P
r
(
ω
) = K
p
, Q
r
(
ω
) = 0
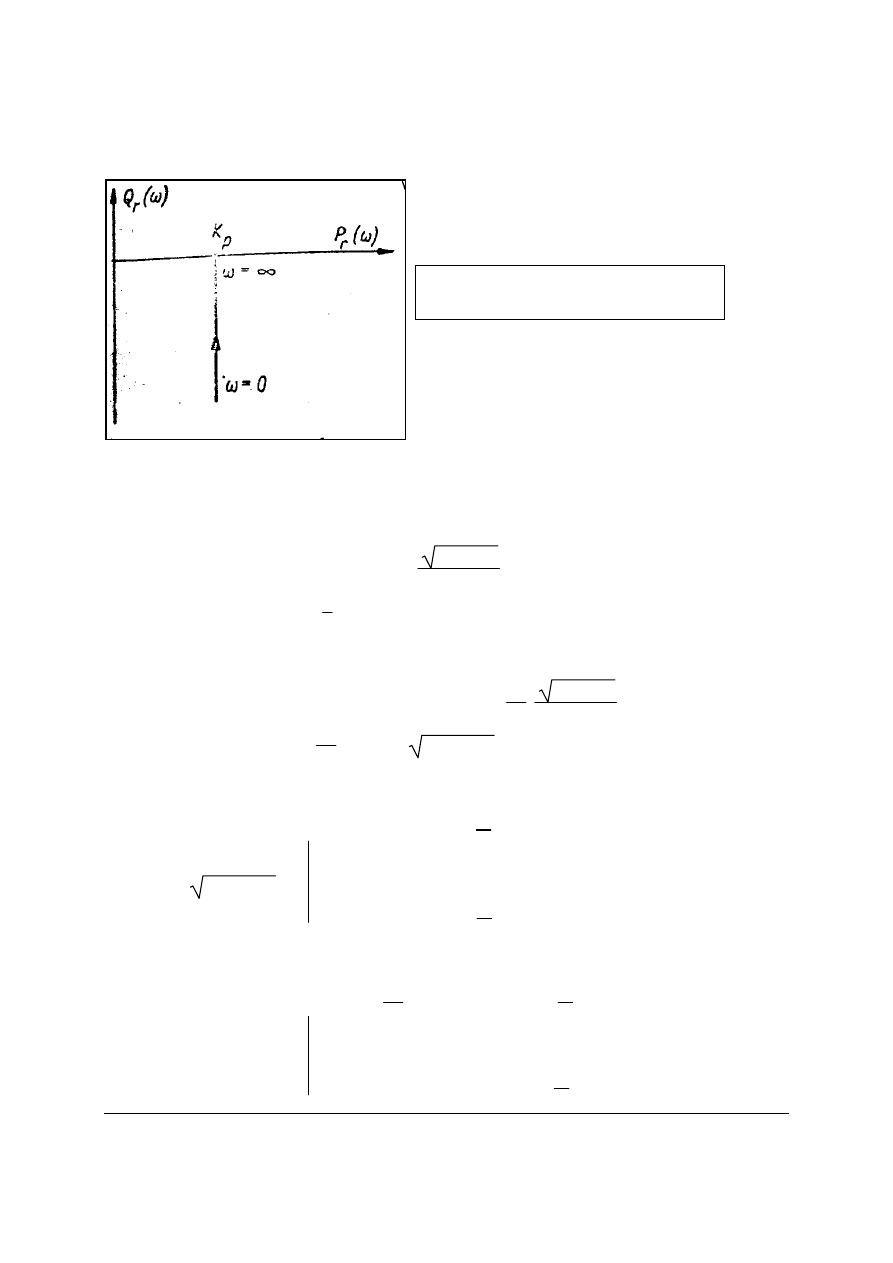
Charakterystyka amplitudowo-fazowa regulatora P ma postać punktu (K
p ,
j0) leżącego
na osi liczb rzeczywistych P
r
(
ω
) – rys 8.2
Rys 1 Charakterystyka skokowa Rys 2 Charakterystyka amplitudowo-fazowa
regulatora P regulatora P
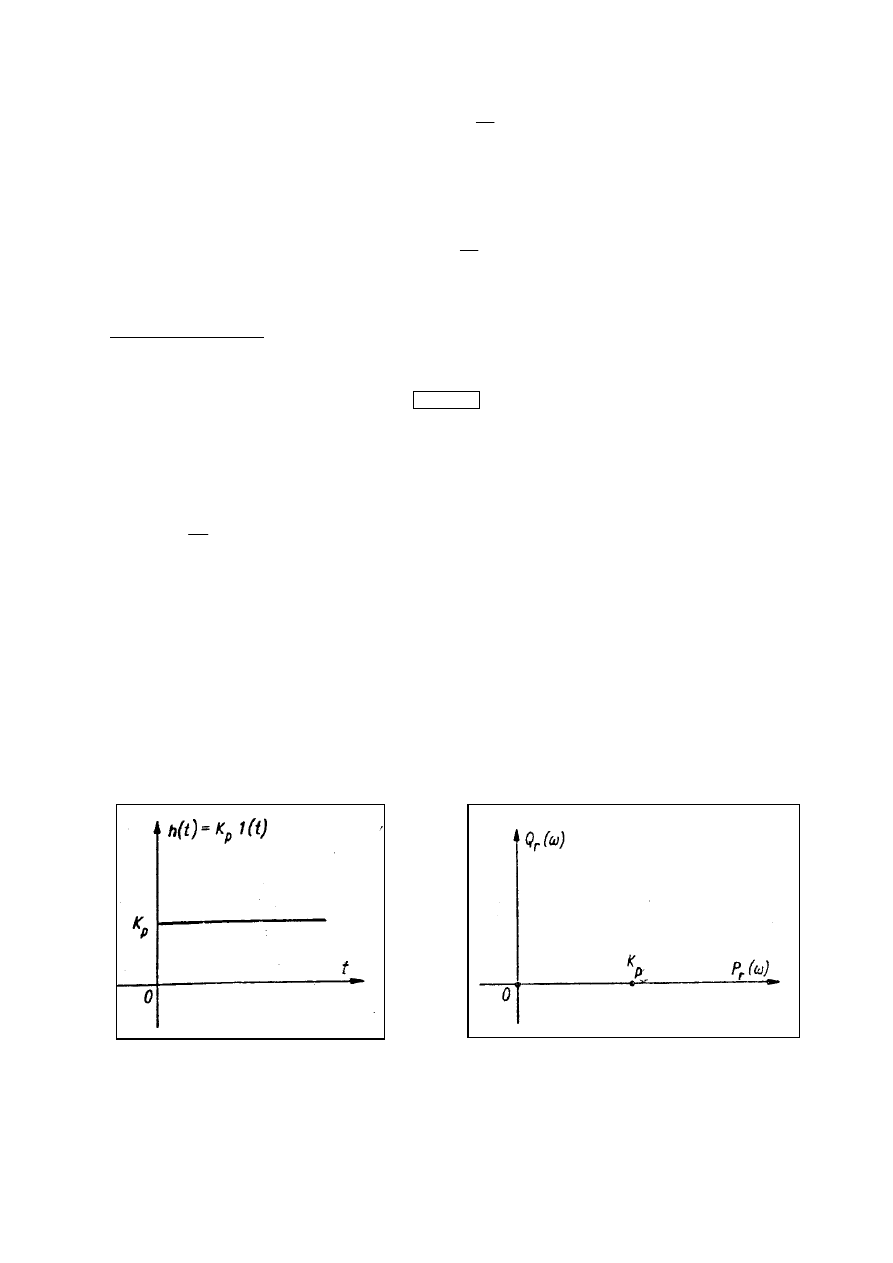
Z zależności (8.4) wynika , że dla regulatora P logarytmiczna charakterystyka
amplitudowa i logarytmiczna charakterystyka fazowa mają postać :
L (
ω
) = 20 log
|
G
r
(j
ω
)
|
= 20 log K
p
ϕ
(
ω
) = 0
Logarytmiczna charakterystyka amplitudowa regulatora p ma zatem postać
równoległej do osi odciętych , a logarytmiczna charakterystyka fazowa pokrywa się z osią
odciętych – rys 3
Rys 8.3 Logarytmiczna charakterystyka amplitudowa i fazowa regulatora P
8.3 Regulator całkowy
Regulatorem całkowym zwanym krótko regulatorem I nazywamy regulator o
transmitancji operatorowej (8)
G
r
(s) =
1
sT
i
czyli regulator , dla którego zależność między uchybem regulacji e(t) a zadanym sygnałęm
sterującym u(t) ma postać (9)
u(t) =
1
T
i
⌡
⌠
0
t
e (
τ
) d
τ
przy czym stały współczynnik Ti nazywa się stałą czasową całkowania.
Regulator I jest idealnym członem całkującym.
Charakterystyka skokowa h(t) regulatora I , określona jest jako odpowiedź na
wymuszenie w postaci skoku jednostkowego , ma postać), h(t) =
1
T
i
t
Wykres charakterystyki skokowej regulatora I przedstawia - rys 4
Rys 8.4 Charakterystyka
skokowa regulatora I
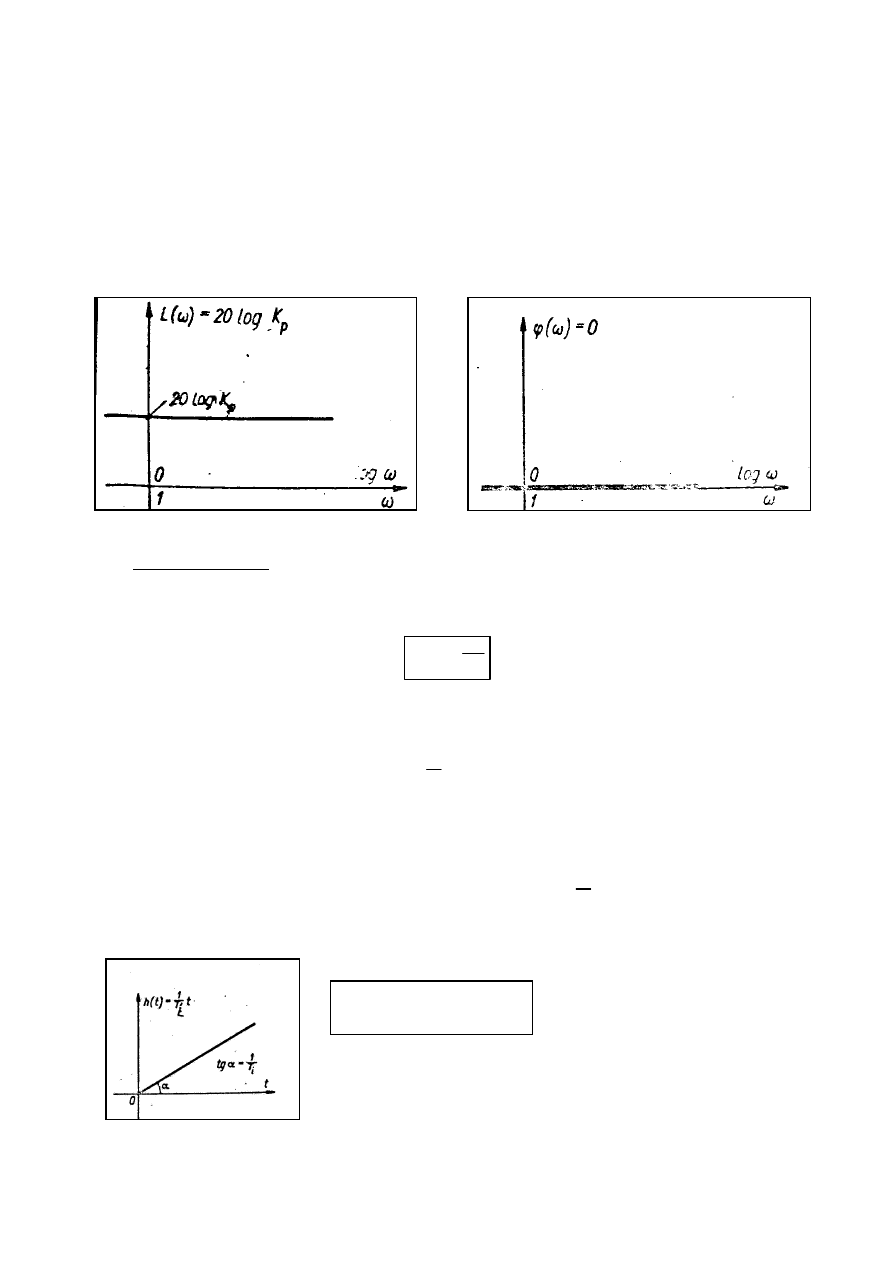
Wyznaczając transmitancję widmową na podstawie znajomości transmitancji operatorowej
regulatora I otrzymamy
G
r
(j
ω
) = G
r
(s) s =j
ω
Stosując to podstawienie do wzoru (8)
1
T
i
j
ω
= P
r
(
ω
) + jQ
r
(
ω
) (11)
przy czym P
r
(
ω
) = 0 , Q
r
(
ω
) = -
1
T
i
ω
(12)
Charakterystyka amplitudowo-fazowa regulatora I pokrywa się z ujemną półosią liczb
urojonych Q
r
(
ω
) – rys. 5
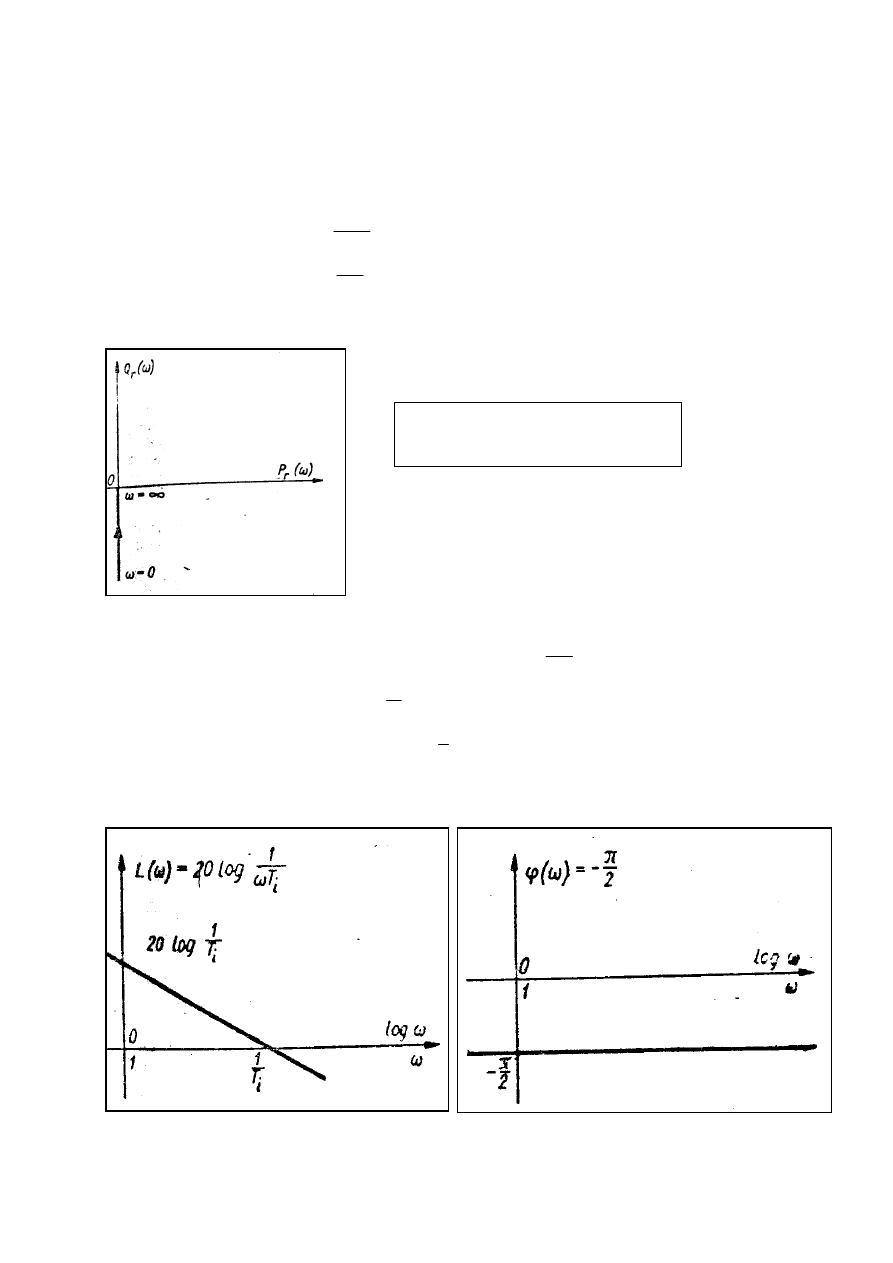
Z zależności (8.11) wynika , że logarytmiczna charakterystyka amplitudowa i
logarytmiczna charakterystyka fazowa regulatora I mają postać :
L (
ω
) = 20 log
|
G
r
(j
ω
)
|
= 20 log
1
T
i
ω
=
20 log
1
T
i
– 20 log
ω
(13)
ϕ
(
ω
) = -
π
2 (14)
Wykres logarytmicznej charakterystyki amplitudowej i logarytmicznej charakterystyki
fazowej regulatora I przedstawia - rys 8.6.
Rys 6 Logarytmiczna charakterystyka amplitudowa i fazowa regulatora I
Rys. 8.5 Charakterystyka amplitudowo-
fazowa regulatora I
Regulator proporcjonalno–całkowy
Regulatorem proporcjonalno-całkowym zwanym krótko regulatorem PI nazywamy
regulator o transmisji operatorowej (15)
G
r
(s) = K
p
( 1+
1
sT
i
)
czyli regulator , dla którego zależność między uchybem regulacji e(t) a zadanym sygnałem
sterującym u(t) ma postać
u(t) = K
p
[
e(t) +
1
T
i
⌡
⌠
0
t
e (
τ
) d
τ
]
(16)
Charakterystyka skokowa h(t) regulatora PI , określona jako odpowiedź na wymuszenie w
postaci skoku jednostkowego , ma postać
h(t) = K
p
[ 1(t) +
1
T
i
t] (17)
Przebieg charakterystyki skokowej regulatora PI przedstawia – rys 7.
Z zależności (17) wynika , że dla t = T
i
; h(T
i
) = 2 K
p
. Po czasie równym T
i
składowa h(t)
będąca wynikiem działania całkującego regulatora jest równa składowej pochodzącej od
działania proporcjonalnego tego regulatora. Sygnał łączny po czasie T
i
jest więc dwukrotnie
większy niż w chwili t=0 .
Z zależności (15) mamy
G
r
(j
ω
) = G
r
(s) s =j
ω
K
p
(1 +
1
T
i
j
ω
) = P
r
(
ω
) + jQ
r
(
ω
)
przy czym P
r
(
ω
) = K
p
, Q
r
(
ω
) = -
K
p
T
i
ω
Rys 8.7 Charakterystyka skokowa regulatora PI
Charakterystykę amplitudowo-fazową regulatora PI przedstawia – rys 8.
Z zależności (8.18) mamy
G
r
(j
ω
) =
|
G
r
(j
ω
)
|
e
j
ϕ
(
ω
)
=
K
p
1+(T
i
ω
)
2
ω
e
j
ϕ
(
ω
)
(8.20)
przy czym
ϕ
(
ω
) = arctg
ω
T
i
-
π
2 (8.21)
Logarytmiczna charakterystyka amplitudowa regulatora PI będzie miała zatem postać
L (
ω
) = 20 log
|
G
r
(j
ω
)
|
= 20 log
K
p
T
i
1+(T
i
ω
)
2
ω
=
20 log
K
p
T
i
+ 20 log 1 + (T
i
ω
)
2
– 20 log
ω
(8.22)
biorąc pod uwagę , że :
0 dla
ω
<
1
T
i
20 log 1 + (T
i
ω
)
2
=
(8.24)
20 log
ω
T
i
dla
ω
>
1
T
i
z zależności (8.22) otrzymujemy :
20 log
K
p
T
i
– 20 log
ω
dla
ω
<
1
T
i
L(
ω
) =
(8.24)
20 log K
p
dla
ω
>
1
T
i
Rys 8. Charakterystyka amplitudowo-fazowa
regulatora PI
Doświadczalne metody doboru nastaw regulatorów
Dla każdego procesu istnieje możliwość ścisłej analizy teoretycznej układów sterowania, która
pozwala na dowolne wyznaczenie właściwości projektowanego układu, metodyka taka nie jest jednak
przydatna w praktyce, gdyż w tym przypadku przy dobieraniu nastaw regulatorów bardzo rzadko
dysponuje się dokładnymi danymi dotyczącymi obiektu. Zadanie doboru nastaw regulatorów polega
na takim ich ustaleniu, aby otrzymać zadowalające działanie układu sterowania.
E(s)
R(s)
Y(s)
G
R
(s)
Regulator
G(s)
Obiekt
Z(s)
U(s)
Rys. 1. Schemat blokowy układu regulacji
Do wymagań najczęściej stawianych układom regulacji a tym samym regulatorom zaliczamy :
−
wyeliminowanie przeregulowań
%
p
M
= 0...5% oraz osiągnięcie przy zachowaniu tego warunku
najkrótszego z możliwych czasu regulacji t
R
−
najkrótszy z możliwych do osiągnięcia czas regulacji t
R
przy występowaniu przeregulowania do
ograniczonej wartości np.
%
p
M
= 15...25%
−
uzyskanie minimum wybranego wskaźnika całkowego I, np. całki z kwadratu uchybu: I=
dt
t
e
∫
∞
0
2
)
(
min
Dopuszczalne ustalone wartości uchybu regulacji powinny być mniejsze niż
(
)
%
5
...
5
,
0
±
wartości
maksymalnej wielkości regulowanego Y.
Całkowe wskaźniki jakości regulacji
Całkowe wskaźniki jakości umożliwiają prowadzenie na bieżąco obiektywnego pomiaru jakości regulacji.
Ilościowy pomiar jakości jest konieczny w nowoczesnych układach sterowania adaptacyjnego, w układach
automatycznej optymalizacji parametrów układu sterowania i przy projektowaniu układów optymalnych.
Jeśli celem jest poprawa projektu układu lub zaprojektowanie układu sterowania wówczas musi zostać
określone kryterium jakości.
Indeks jakości jest ilościowym wskaźnikiem jakości układu i jest tak dobrany aby uwzględnić ważne
wymagania dotyczące układu.
Układ, określany jest mianem układu sterowania optymalnego wówczas, gdy jego parametry są tak dobrane, aby
indeks osiągał ekstremalną wartość. Indeks jakości aby mógł być użyteczny i łatwy w stosowaniu, musi być
liczbą, która zawsze jest dodatnia lub równa zero.
Ogólna postać całkowego wskaźnika jakości jest następująca
( ) ( ) ( )
(
)
∫
=
T
dt
t
t
y
t
r
t
e
f
I
0
,
,
,
gdzie f jest funkcją uchybu, sterowania, wyjścia i czasu. Można uzyskać numeryczne indeksy oparte na różnych
kombinacjach zmiennych układu i czasu. Dla przykładu, minimalizacja indeksu jakości może być bezpośrednio
odniesiona do minimalizacji zużycia paliwa.
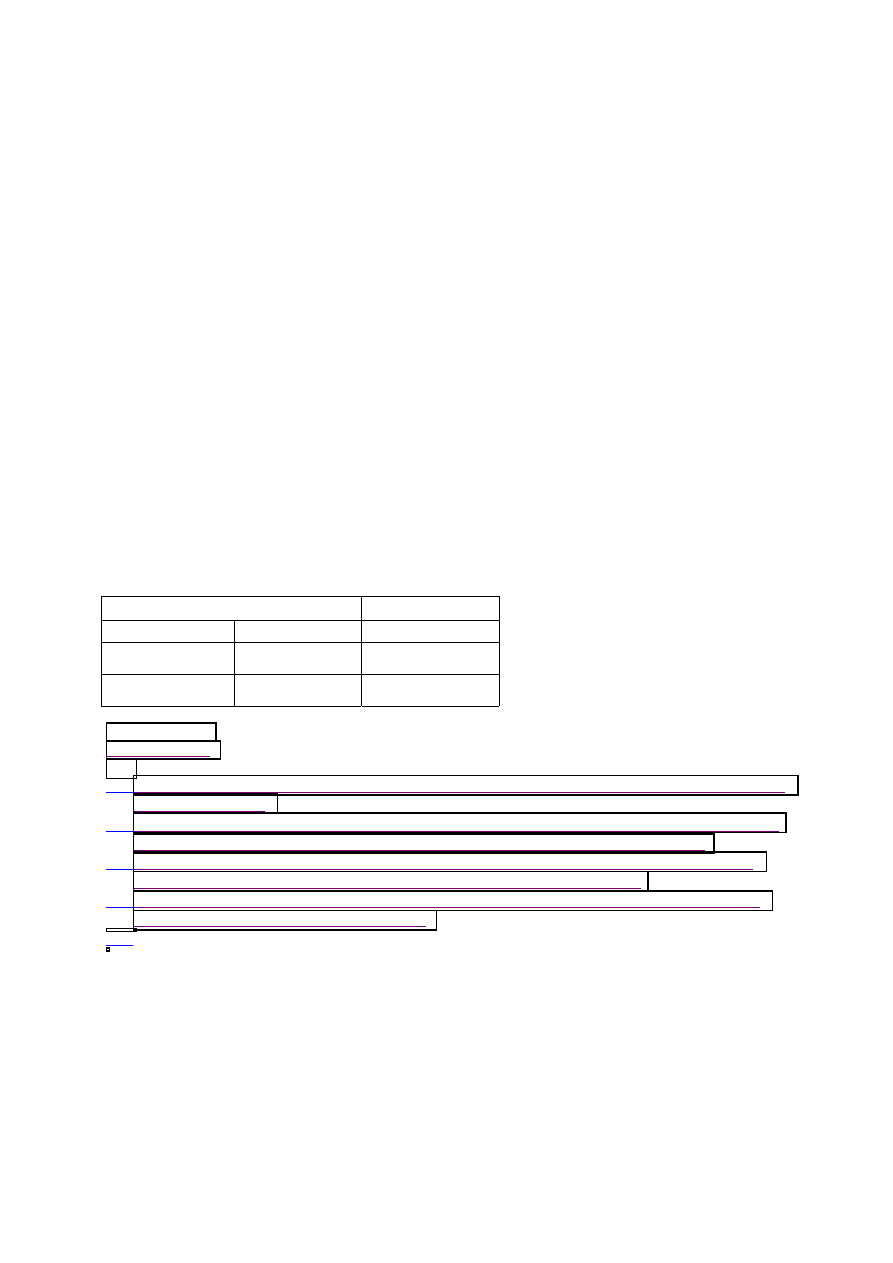
CAŁKA Z KWADRATU UCHYBU
Odpowiednim indeksem jakości jest całka uchybu kwadratowego, ISE (Integral Square Error), który
definiowany jest jako
( )
∫
=
T
dt
t
e
0
2
ISE
(2)
Górna granica T jest czasem skończonym wybranym w sposób arbitralny po to aby całka osiągała wartość
ustaloną. Zazwyczaj jako T wybiera się czas ustalania, t
R
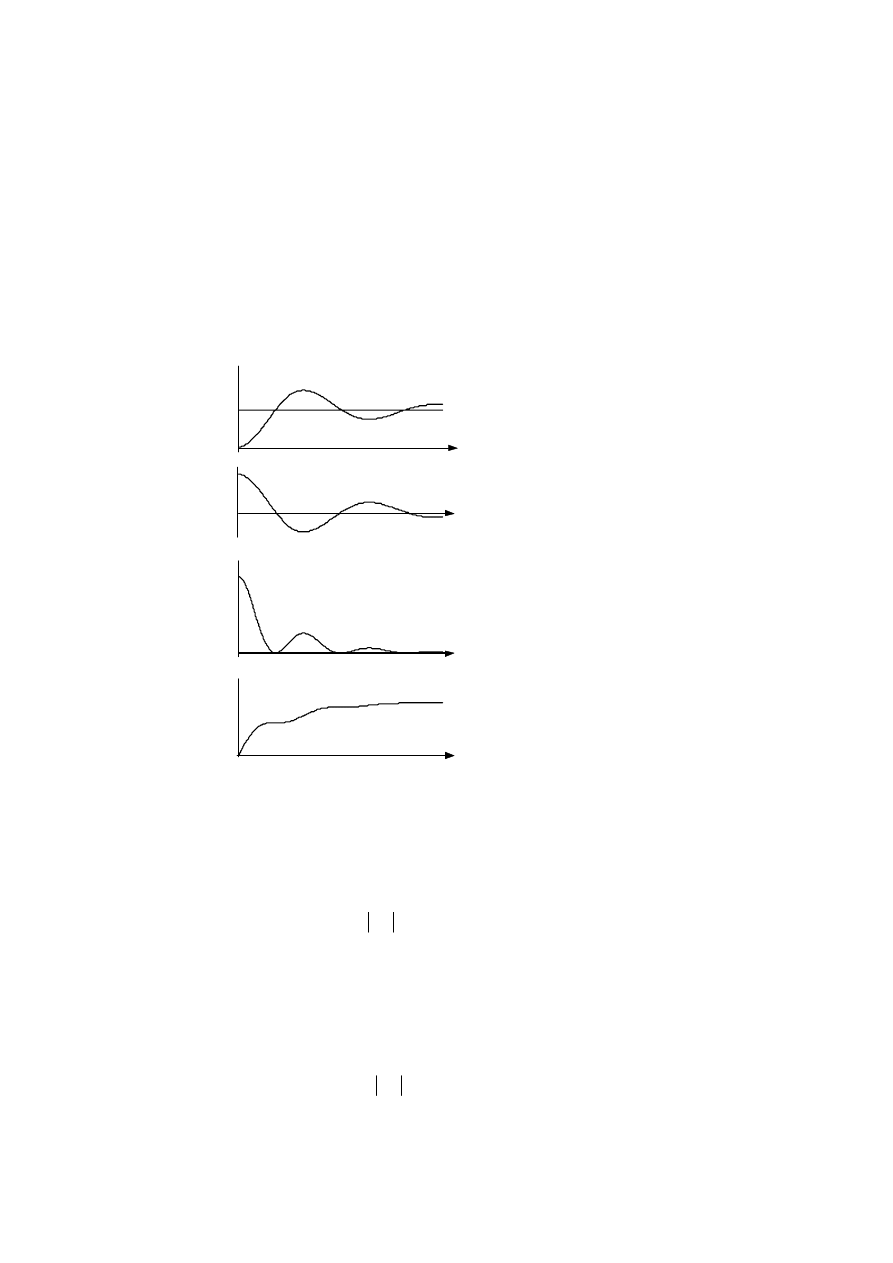
. Odpowiedź skokowa dla określonego układu
sterowania pokazana została na rysunku 1(b), natomiast uchyb na rysunku 1(c). Kwadrat uchybu pokazany
został na rysunku 1(d), a całka uchybu kwadratowego na rysunku 1(e). Minimalna wartość całki pojawia się
wówczas, gdy będzie odpowiednie tłumienie. Indeks jakości opisany równaniem (2) może być łatwo
zastosowany do pomiaru jakości w układach praktycznych. Dlatego też uchyb kwadratowy jest dogodny
matematycznie w celach analitycznych i obliczeniowych.
t
y(t)
e(t)
e
2
(t)
∫
dt
t
e
)
(
2
t
t
t
Rys. 1. Przebiegi wielkości układu regulacji .
CAŁKA Z WARTOŚCI BEZWZGLĘDNEJ UCHYBU
Innym kryterium jakości jest całka z wartości bezwzględnej uchybu, IAE (Integral Absolute Error), który
zapisywany jest następująco:
( )
∫
=
T
dt
t
e
0
IAE
(3)
Ten indeks jest szczególnie użyteczny w symulacjach komputerowych.
CAŁKA Z ILOCZYNU CZASU I WARTOŚCI BEZWZGLĘDNEJ UCHYBU
Aby zmniejszyć udział dużej wartości początkowej uchybu na całkowy wskaźnik jakości i uwidocznić uchyby
pojawiające się w późniejszej odpowiedzi, zaproponowany został następujący indeks
( )
∫
=
T
dt
t
e
t
0
ITAE
(4)
Ten wskaźnik zaprojektowany został jako całka czasu mnożonego przez wartość bezwzględną uchybu, ITAE
(Integral Time Absolute Error). Indeks ITAE jest najbardziej selektywnym z całkowych wskaźników jakości,
gdyż minimalna wartość całki jest łatwo rozpoznawalna gdy zmieniają się parametry układu.
2.4. CAŁKA Z ILOCZYNU CZASU I KWADRATU UCHYBU
Innym podobnym indeksem jest całka z czasu pomnożonego przez kwadrat uchybu, ITSE (Integral Timie Square
Error).
( )
∫
=
T
dt
t
te
0
2
ITSE
Regulatory liniowe
Najczęściej sstosowane są następujące regulatory liniowe:
a)
−
regulator proporcjonalny P
b) regulator proporcjonalno
−
całkujący PI
c) regulator proporcjonalno
−
różniczkujący PD
d) regulator PD z rzeczywistym członem różniczkującym
+
+
=
n
D
P
R
sT
sT
K
s
G
1
1
)
(
e) regulator proporcjonalno
−
całkująco
−
różniczkujący PID
f) regulator PID z rzeczywistym członem różniczkującym
+
+
+
=
n
D
I
P
R
sT
sT
sT
K
s
G
1
1
1
)
(
(6)
Innym rozwiązaniem regulatora PID jest układ szeregowo połączonych bloków PI oraz PD. W tym
przypadku transmitancja regulatora jest następująca
+
+
⋅
+
=
n
D
I
P
r
sT
sT
sT
K
s
G
1
1
1
1
)
(
W innych wykonaniach regulatorów spod działania różniczkującego wyklucza się sygnał wartości
zadanej
z
y
i uzyskuje się nieinteraktywną strukturę regulatora PID
)
(
1
)
(
1
)
(
s
Y
sT
sT
s
E
sT
K
s
U
n
D
I
P
⋅
+
−
⋅
+
=
(8)
Stosowana jest również struktura regulatora o postaci
)
(
)
(
1
1
)
(
1
1
)
(
s
Y
s
Y
sT
sT
s
Y
sT
K
s
U
n
D
z
I
P
⋅
⋅
+
+
−
⋅
+
=
(9)
gdzie:
P
K
−
współczynnik wzmocnienia regulatora, określany niekiedy przez zakres
proporcjonalności
P
P
K
x
%
100
=
I
T
−
stała czasowa całkowania
D
T
−
stała czasowa różniczkowania
n
T
−
stała czasowa filtru inercyjnego występującego czasami w członach różniczkowania.
Stała ta zawiera się najczęściej w przedziale
(
)
D
n
T
T
25
.
0
05
.
0
÷
≈
Pomiary własności dynamicznych obiektów regulacji metodą skoku
jednostkowego
Optymalne nastawy regulatorów moga być również dobrane na podstawie tabel, wykresów
/nomogramów/ , wzorów empirycznych. Zalecenia te dotyczą obiektów podzielonych na dwie klasy:
obiekty statyczne i obiekty astatyczne, których charakterystyki aproksymuje się następującymi
transmitancjami [1]:
−
obiekty statyczne
1
)
(
+
=
−
Ts
Ke
s
G
sTo
(10)
−
obiekty astatyczne
Ts
e
s
Ke
s
G
sTo
sTo
−
−
=
=
)
(
;
T
K
1
=
(11)
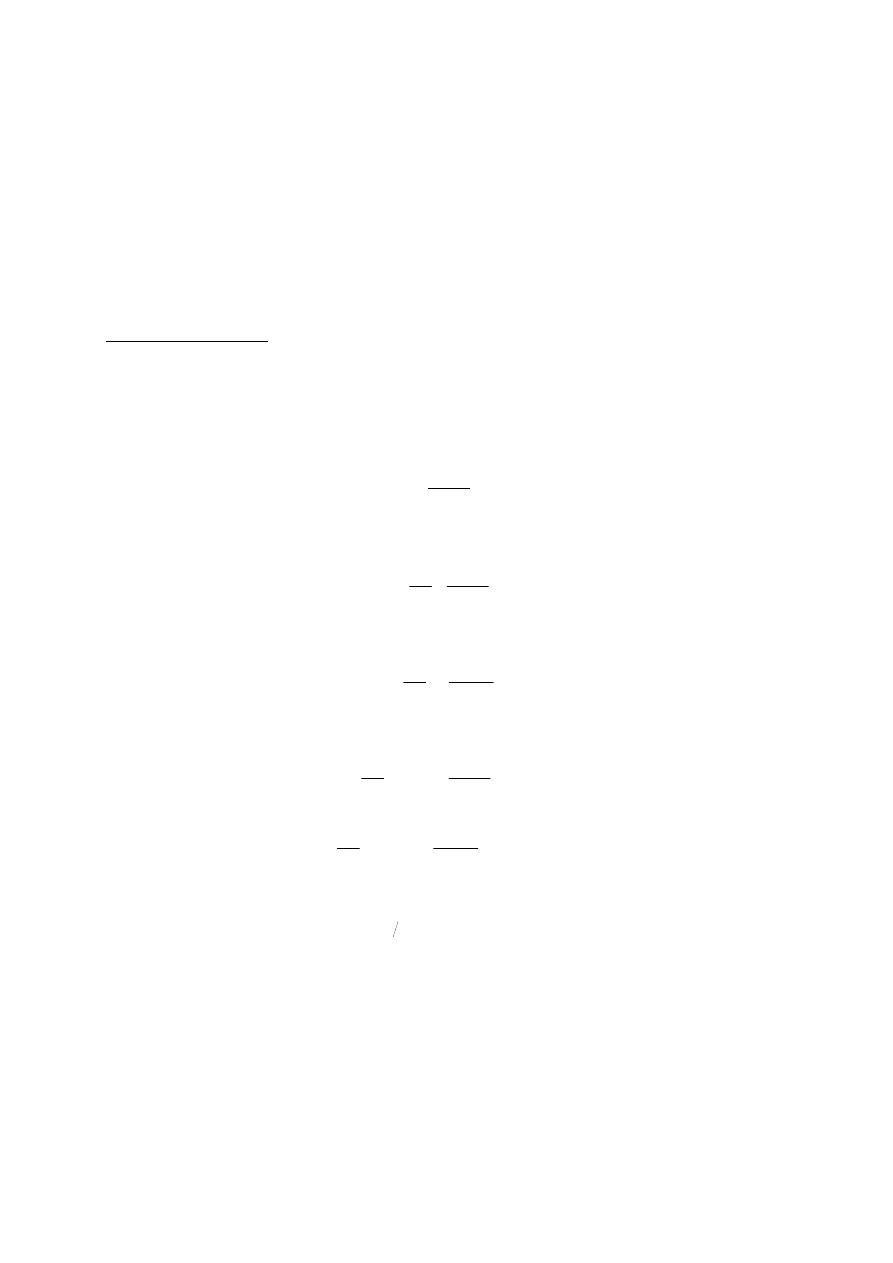
Sposób wyznaczania parametrów modelu K, T,
o
T
odwzorowującego obiekt na podstawie odpowiedzi
na skok jednostkowy pokazano na rysunku 2.
K
y(t)
t
T
o
T
Nachylenie R=
K
T
u
y(t)
t
T
o
∆
t
∆
y
T =
∆
t
∆
y
u
R =
∆
y
∆
t
(a)
(b)
Rys. 2. Sposób określenia parametrów K, T,
o
T
na podstawie odpowiedzi skokowej (jednostkowej)
procesu. (a) dla obiektu statycznego wieloinercyjnego , (b) dla obiektu astatycznego.
Metody doboru nastaw regulatorów według reguły Zieglera-Nicholsa
Na bazie obserwacji eksperymentalnych strategii strojenia regulatorów PID w procesach
przemysłowych, Ziegler i Nichols zaproponowali dwie metody doboru nastaw. Metody te wymagają
pomiaru odpowiedzi układu i są powszechnie stosowane dla układów statycznych najczęściej
spotykanych w układach sterowania (np. sterowanie poziomem, temperaturą, ciśnieniem, przepływem,
itd.). Metody doboru nastaw opracowane przez Zieglera i Nicholsa opierająca się odpowiedzi
skokowej i możliwe są do zastosowania w tych układach w których odpowiedź skokowa układu
otwartego jest bez przeregulowań tak jak ta pokazana na rysunku 2a. Ziegler i Nichols opracowali
dwie metody strojenia regulatorów dla takich modeli [2].
Metoda bazująca na odpowiedzi skokowej.
Ziegler i Nichols zauważyli, że odpowiedź skokowa większości układów sterowania ma kształt
podobny do tego z rysunku 2a. Krzywa ta może być otrzymana po dokonaniu identyfikacji własności
dynamicznych obiektu.
Krzywa o kształcie S jest charakterystyczna dla układów inercyjnych wyższych rzędów.
Transmitancja (10) aproksymuje układy wyższych rzędów prostym układem pierwszego rzędu z
dodatkowym opóźnieniem T
o
wyrażonym w sekundach. Stałe w równaniu (10) mogą być określone z
odpowiedzi skokowej procesu. Jeśli styczna narysowana jest w punkcie przegięcia krzywej
odpowiedzi, wówczas nachylenie linii jest wyznaczane ze wzoru R=K/T, a przecięcie stycznej z osią
czasu określa czas opóźnienia T
o
.
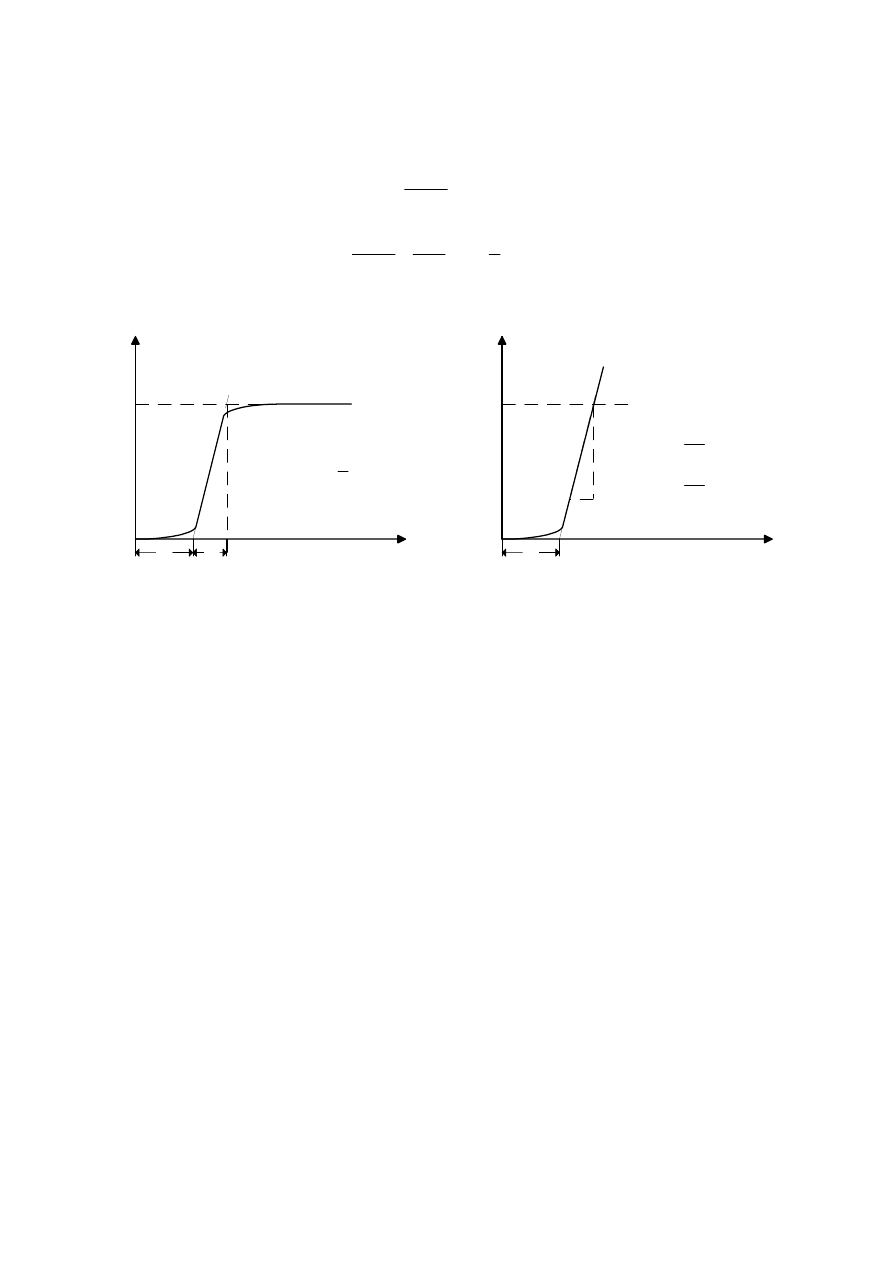
W pierwszej metodzie wybór parametrów regulatora opiera się na współczynniku zanikania
równym w przybliżeniu 0.25. Oznacza to, że dominująca składowa przejściowa zanika do jednej
czwartej swojej wartości maksymalnej po jednym okresie oscylacji (rys. 3). Takie zanikanie
odpowiada współczynnikowi
ζ
= 0.21 w układzie II rzędu i wartość ta ustalona została na zasadzie
kompromisu pomiędzy szybką odpowiedzią i wystarczającym zapasem stabilności.
Autorzy symulowali równania dla różnych układów na komputerze analogowym i stroili
parametry regulatorów, aż uzyskali odpowiedzi przejściowe zanikające do 25% poprzedniej wartości
w jednym okresie. Metoda Zieglera-Nicholsa bazująca na odpowiedzi skokowej daje dobre rezultaty
gdy spełniony jest następujący warunek :
6
.
0
15
.
0
<
<
T
T
o
.
Parametry regulatora zaproponowane przez Zieglera i Nicholsa dla typowego regulatora pokazane są
w tabeli 1.
Rys. 3. Kwadratowy współczynnik zanikania
Tabela 1. Strojenie parametrów regulatora metodą odpowiedzi skokowej Zieglera-Nicholsa,
o
RT
a
=
Optymalne wzmocnienia
Typ regulatora
K
p
T
I
T
D
P
1/a
−
−
PI
0.9/a
3T
o
−
PID
1.2/a
2T
o
0.5T
o
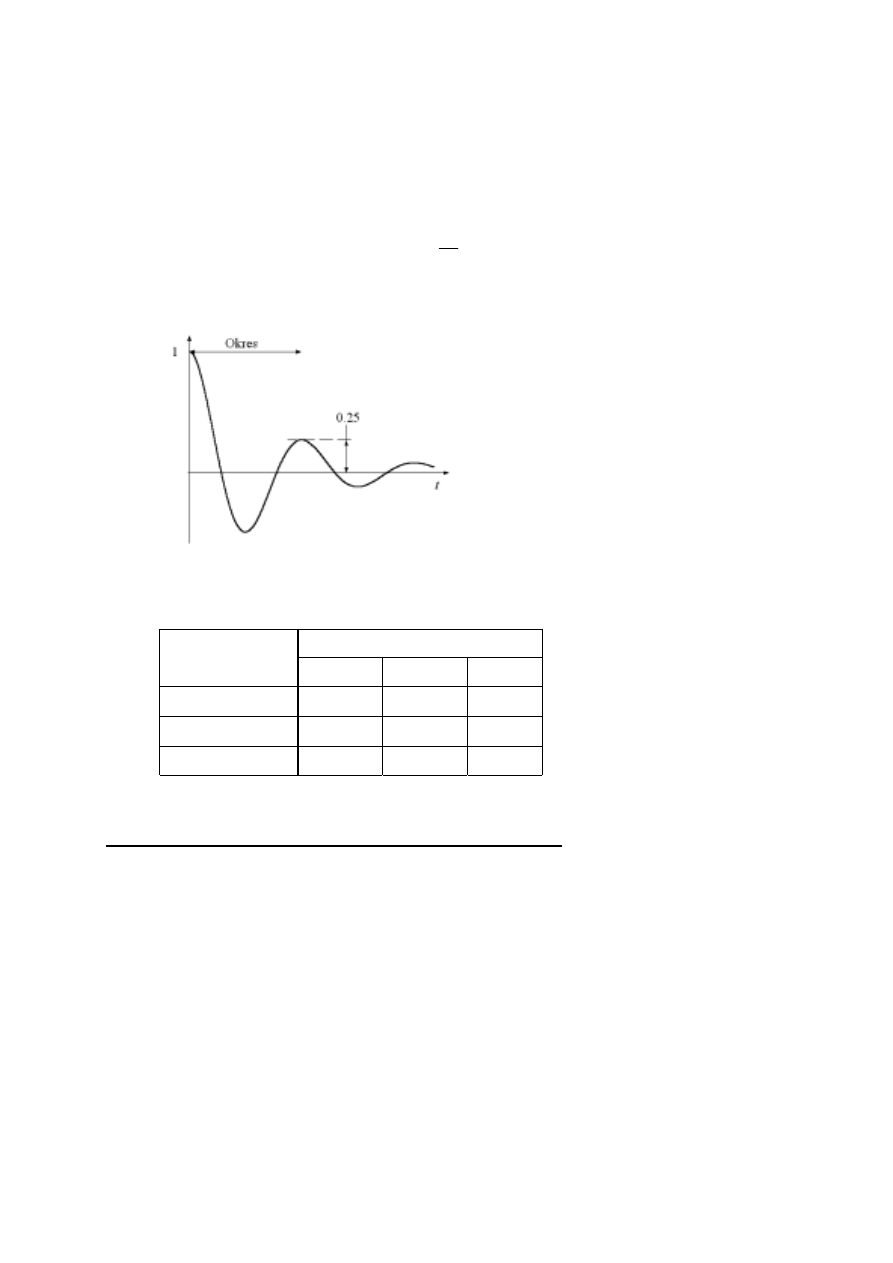
Metoda z wyznaczaniem wzmocnienia krytycznego
W drugiej metodzie kryterium strojenia parametrów opiera się na ocenie układu znajdującego się na
granicy stabilności. Ten algorytm strojenia może być stosowany dla układów typu 0 posiadających
rząd > 2. Może być również zastosowana do samonastrajania regulatorów PID. Metoda ta możliwa
jest do zastosowania jeśli możliwe jest znalezienie wzmocnienia przy którym wykres Nyquista
przecina punkt krytyczny lub kiedy linia pierwiastkowa przecina oś liczb urojonych. Wzmocnienie to
może być znalezione eksperymentalnie, wymaga się wówczas zwiększania wzmocnienia w układzie
zamkniętym aż na wyjściu pojawią się oscylacje o stałej amplitudzie. Jest to w niektórych
zastosowaniach praktycznych bardzo niebezpieczna operacja. Zwiększa się wzmocnienie
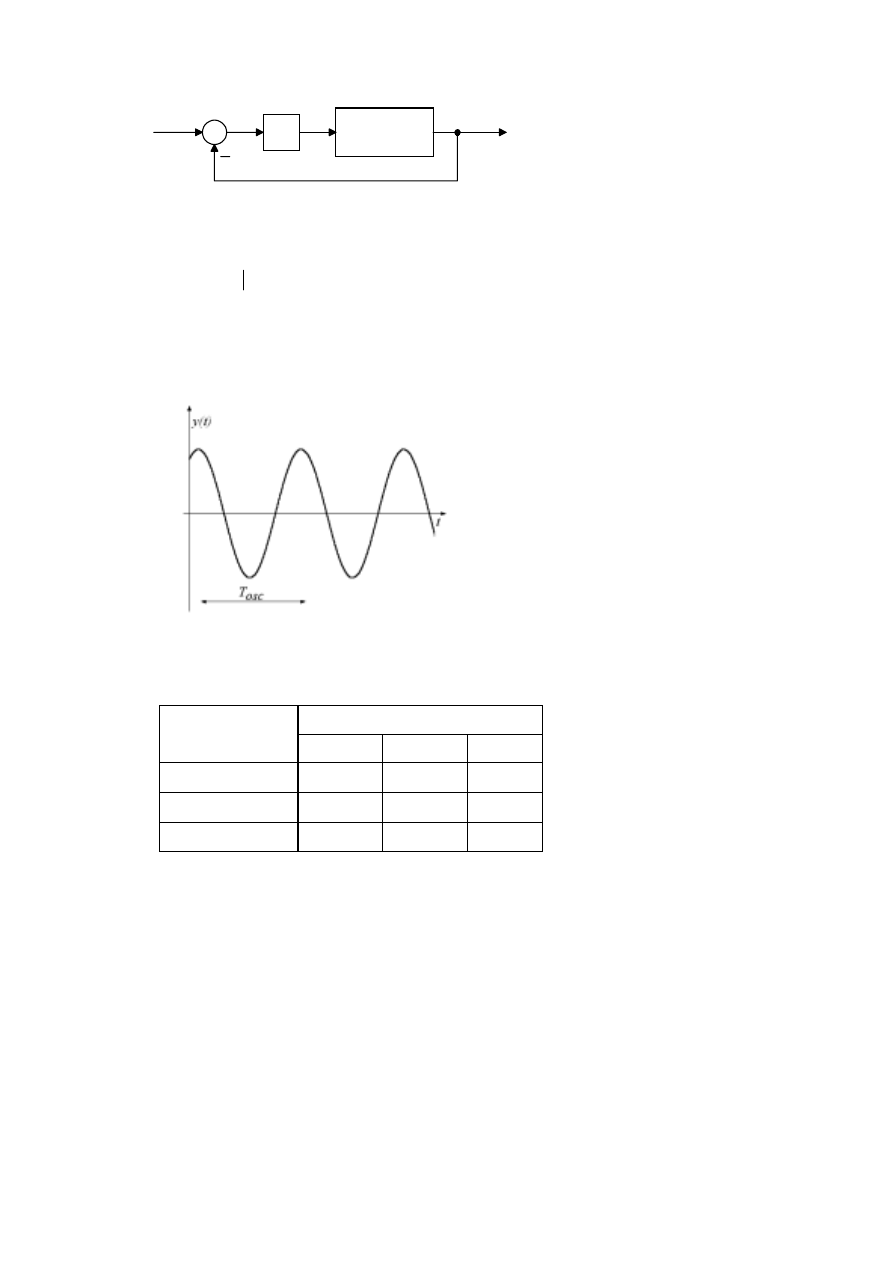
proporcjonalne aż zauważy się oscylacje o stałej amplitudzie, odpowiada to wzmocnieniu
krytycznemu K
kr
(rys. 4) i oscylacjom o okresie T
osc
(rys. 5). Okres oscylacji powinien być mierzony
kiedy amplituda oscylacji jest dość mała. Dobór nastaw odbywa się według tabeli 2 [2].
Proces
K
kr
r(t)
e(t)
y(t)
u(t)
Rys. 4. Określenie wzmocnienia krytycznego i okresu oscylacji
Wzmocnienie statyczne dla pętli otwartej układu
( )
0
=
=
s
o
s
GH
K
Metoda strojenia bazująca na wzmocnieniu krytycznym daje dobre rezultaty gdy spełniony jest
warunek:
20
2
<
<
kr
o
K
K
lecz znów odpowiedź układu zamkniętego zawiera oscylacje.
Rys. 5. Układ na granicy stabilności
Tabela 2. Strojenie parametrów regulatora metodą bazującą na granicy stabilności układu
Optymalne wzmocnienia
Typ regulatora
K
P
T
I
T
D
P
0.5K
kr
−
−
PI
0.45K
kr
T
osc
/1.2
−
PID
0.6K
kr
T
osc
/2
T
osc
/8
Metody strojenia Zieglera-Nicholsa dają w rezultacie odpowiedzi w których występują oscylacje i
powinny być jeszcze dostrajane ręcznie.
Inne reguły nastaw regulatorów PID
W tabelach 3 i 4 zebrane zostały zasady doboru nastaw regulatorów dla obiektów statycznych i
astatycznych opisanych transmitancjami (10) oraz (11) według kryteriów: 0% i 20% przeregulowania
oraz minimum całki kwadratu uchybu [3].
Tabela 3. Optymalne nastawy regulatorów w przypadku obiektów statycznych z opóźnieniem (10),
o
RT
a
=
Przeregulowanie
%
0
≈
Minimum czasu regulacji
R
t
Przeregulowanie
%
20
≈
Minimum czasu regulacji
R
t
dt
t
e
∫
∞
0
2
)
(
min
Typ
regulator
a
K
P
T
I
T
D
K
P
T
I
T
D
K
P
T
I
T
D
P
0.3/a
−
−
0.7/a
−
−
−
−
−
PI
0.6/a
0.8T
o
+0.5T
−
0.7/a
T
o
+0.3T
−
1/a
T
o
+0.35T
−
PID
0.95/a
2.4 T
o
0.4 T
o
1.2/a
2.0 T
o
0.4 T
o
1.4/a
1.3 T
o
0.5 T
o
Tabela 4. Optymalne nastawy regulatorów w przypadku obiektów astatycznych z opóźnieniem (11)
Przeregulowanie
%
0
≈
Minimum czasu regulacji
R
t
Przeregulowanie
%
20
≈
Minimum czasu regulacji
R
t
dt
t
e
∫
∞
0
2
)
(
min
Typ
regulator
a
K
P
T
I
T
D
K
P
T
I
T
D
K
P
T
I
T
D
P
o
T
T
⋅
37
.
0
−
−
o
T
T
⋅
7
.
0
−
−
−
−
−
PI
o
T
T
⋅
46
.
0
o
T
⋅
75
.
5
−
o
T
T
⋅
7
.
0
o
T
⋅
3
−
o
T
T
⋅
1
o
T
⋅
3
.
4
−
PID
o
T
T
⋅
65
.
0
o
T
⋅
5
o
T
⋅
23
.
0
o
T
T
⋅
1
.
1
o
T
⋅
2
o
T
⋅
37
.
0
o
T
T
⋅
36
.
1
o
T
⋅
6
.
1
o
T
⋅
5
.
0
2.Przebieg ćwiczenia.
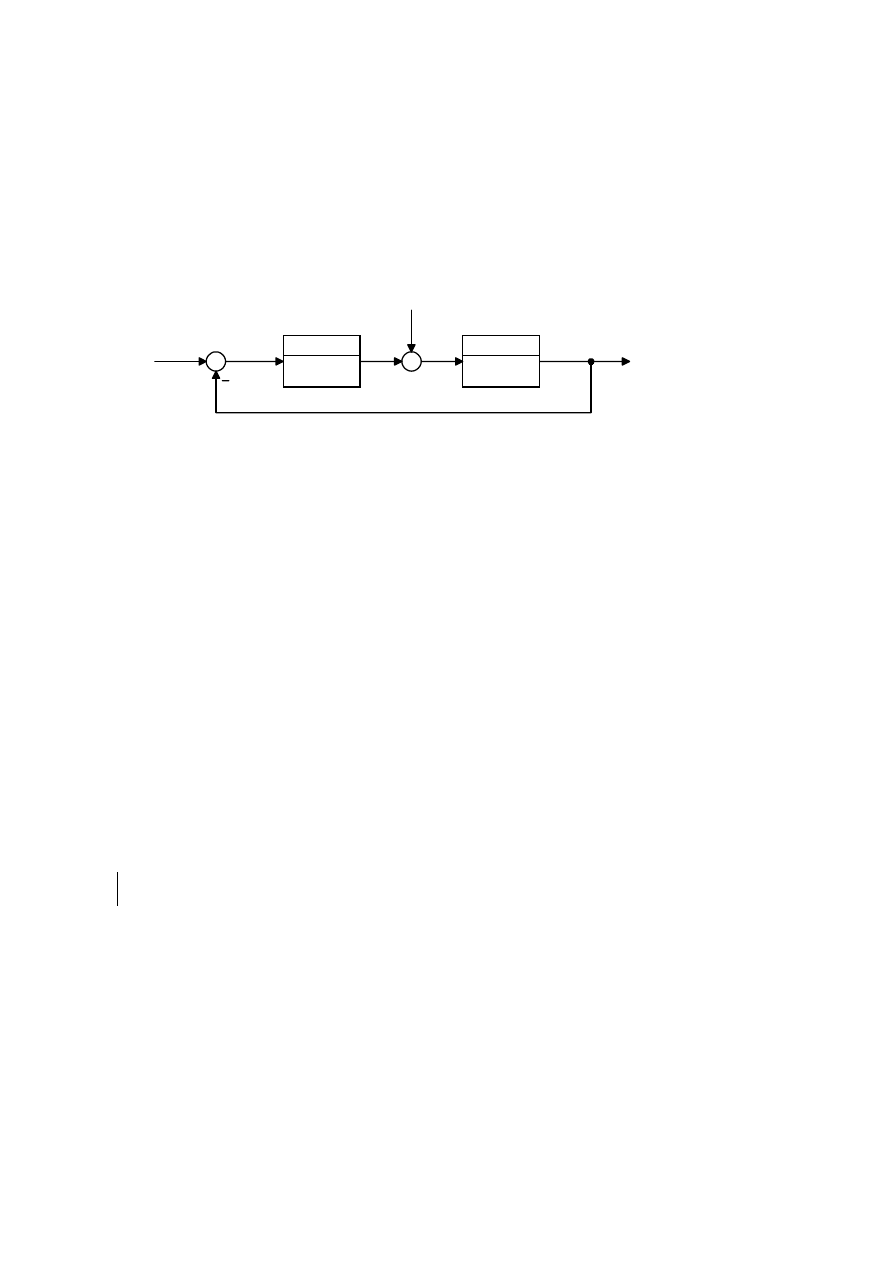
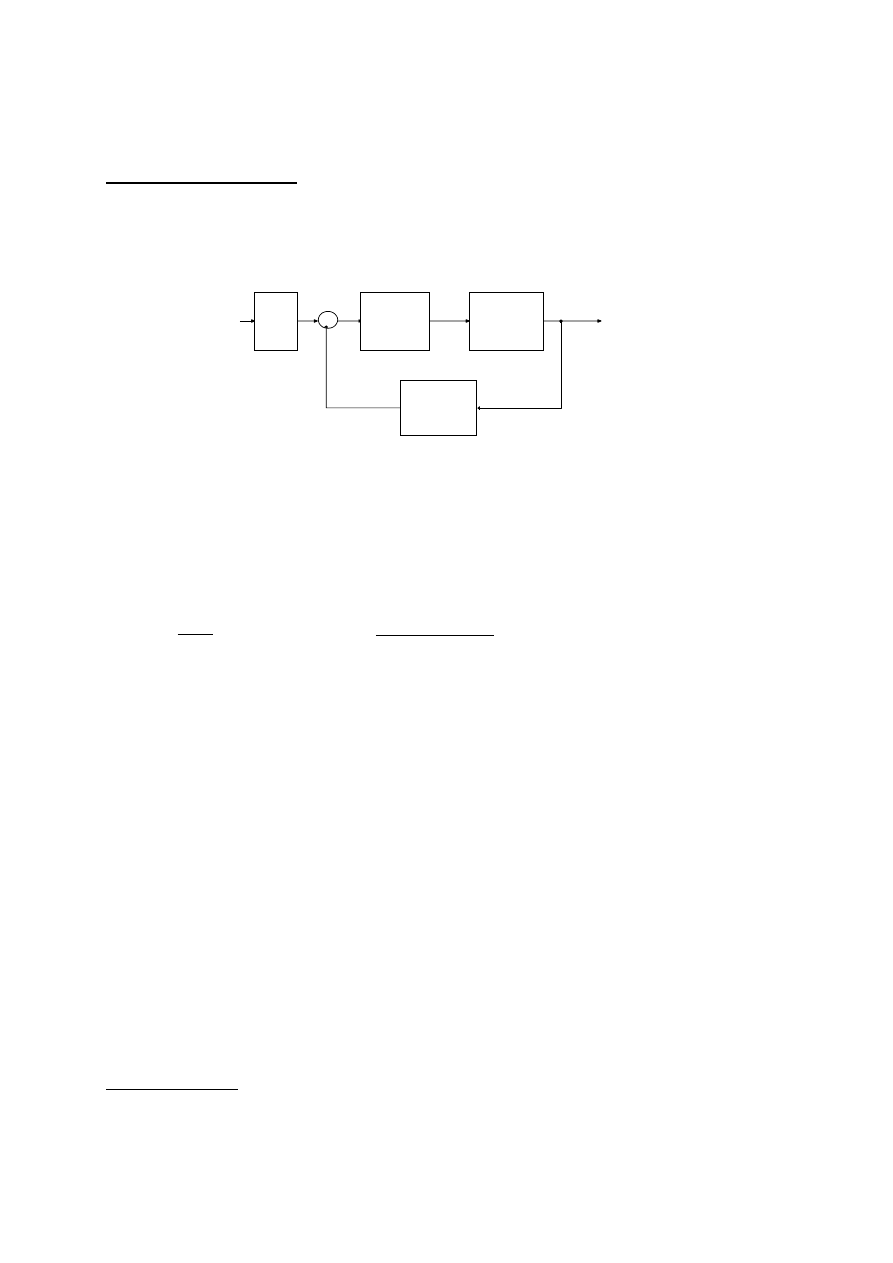
1) Zamodelować na komputerze pod
sisotool
zamknięty układ regulacji według poniższego schematu .
Mierzony jest sygnał wyjściowy y=f(t). Sygnał zadany jest równy x(t) = 1(t)*F. Przyjąć, że
urządzenia pomiarowe mają transmitancję G
up
(s)=1, zas zakłócenia są równe zero.
C(s)
G(s)
H(s)
-
+
y
x
F
1
rys.3 Schemat blokowy zamkniętego układu regulacji
F- człon formujący wartość zadaną
C(s)-transmitancja regulatora
G(s)-transmitancja wypadkowa urządzenia wykonawczego i obiektu
H(s) transmitancja toru sprzężenie zwrotnego ( czujnik, wzmacniacz , przetwornik)
w
2) Transmitancję członu wykonawczego oraz szeregowo połączonego z nim obiektu niech będzie równa
s
s
G
urzwyk
3
1
1
)
(
+
=
5
10
2
2
+
⋅
+
+
=
s
)
T
(
s
K
)
s
(
G
ob
T poda prowadzący zajęcia
3) Wyznaczyć charakterystykę skokową obiektu wraz z urządzeniem wykonawczym.
4)
W układzie zamkniętym zastosować regulator wskazany przez prowadzącego zajęcia.
5) Dobrać nastawy regulatora według I i II reguły Zieglera – Nicholsa . Typ regulatora wskaże prowadzący
zajęcia.
6) Przeprowadzić symulację pracy zaprojektowanego układu regulacji. Zarejestrować przebiegi uchybu
regulacji .
7) Doświadczalnie dopasować nastawy regulatora tak, aby
a) zmniejszyć przeregulowania
b) skrócić czas regulacji
Sformułować płynące z tego wnioski
.
Zagadnienia:
1) Jaki wpływ na uchyb ustalony przy zastosowaniu regulatora proporcjonalnego wywiera jego wzmocnienie
Kp
2) Jaki wpływ na oscylacje w układzie wywrze zwiększenie stałej zdwojenia Ki w regulatorze PI lub PID ?
3) Jaki wpływ na oscylacje w układzie wywrze dodanie do regulatora P lub PI części różniczkującej ?
4) Jaki wpływ na poziom uchybu ustalonego wywrze dodanie do regulatora P lub PD części całkującej ?
5) Jaki wpływ na czas regulacji wywrze zwiększenie stałej zdwojenia Ki w regulatorze PI lub PID.
3. Sprawozdanie.
1) Wyznaczyć oscylacyjność układu dla tego samego typu regulatora, dobranego według obu metod
Zieglera - Nicholsa.
2) Ustalić również czas regulacji przy tolerancji przedziału
∆
=
±10%
wartości początkowej uchybu.
Czy czas regulacji jest krótszy przy regulacji z przeregulowaniami, czy bez oscylacji ?
3) Omówić różnice w zachowaniu się układu regulacji sterowanym różnymi typami regulatorów
dobranymi według tej samej reguły ( o ile zostały wykonane takie pomiary ).
4) Pomierzyć uchyb ustalony układu. Omówić wpływ typu regulatora oraz wyboru reguły doboru
nastaw regulatora na wielkość tego uchybu . Czy mieści sie on w zalecanym przedziale ?
S P R A W O Z D A N I E
Z L A B O R A T O R I U M
P O D S T A W A U T O M A T Y K I
Eksploatacja Portów i Floty
ĆWICZENIE nr 4
Wydział Nawigacyjny
G R U P A Nr
Imię
Nazwisko
data wykonania
5)
6)
Ustalić również czas regulacji przy tolerancji przedziału
Czy czas regulacji jest krótszy przy regulacji z przeregulowaniami, czy bez oscylacji ?
7)
8)
9)
1. zenia
2. Opis procesu regulacji
3.
Wyszukiwarka
Podobne podstrony:
LaboratoriumProcesorySygnaloweW Nieznany
materialy do zajec laboratoryjn Nieznany
03 Zastosowanie technik laborat Nieznany
LaboratoriumTeoriiSterowaniaITe Nieznany
1 16 lutego 2011 Laboratorium Nieznany
LaboratoriumProcesorySygnaloweW Nieznany
laboratorium artykul 2010 01 28 Nieznany
5 2 3a CCNA1 Laboratorium pl id Nieznany (2)
Laboratorium metod numerycznych Nieznany
LABORATORIUM 1 id 261484 Nieznany
Laboratorium Podstaw Fizyki id Nieznany
Laboratorium nr 5 wskaYniki Nieznany
instrukcja laboratoryjna id 216 Nieznany
Laboratorium wiczenie6 id 26186 Nieznany
Laboratorium z TM spr1 id 26189 Nieznany
Laboratorium INFORMATYKA ET SEM Nieznany
laboratorium maszyny synchronic Nieznany
więcej podobnych podstron