
DCS
– Rozproszony system sterowania. Skalowalność: od 200 zmiennych procesowych do systemów rozproszonych o
architekturze klient/serwer do 60 000 zmiennych procesowych.
Skalowalność (ang. scalability) – możliwość rozbudowy systemów informatycznych w przypadku zwiększonego
zapotrzebowania na zasoby sprzętowe lub zasoby programu
Sterowanie
- celowe oddziaływanie na przebieg procesu, pracę urządzeń procesu lub ich części. Przy tym proces
przemysłowy może być określony jako wzajemne oddziaływanie materiałów i energii dostarczonych do niego.
Rola Człowieka:
• Bezpośredni wykonawca:
- wytop stali;
- rafinacja ropy naftowej;
- przemysł spożywczy;
• Nadzorca:
- kontrola właściwego przebiegu procesu;
- wizualny nadzór;
- zastosowanie urządzeń wykonawczych.
Rodzaj sygnału sterującego
• sterowanie elektryczne:
- przekaźniki i styczniki,
- silniki elektryczne,
- elektrozawory,
- serwomechanizmy.
• sterowanie hydrauliczne:
- siłowniki hydrauliczne.
• sterowanie pneumatyczne:
- siłowniki pneumatyczne.
Aktualnie rozpowszechnione są rozwiązania mieszane, w którym sygnał elektryczny steruje układami
uaktywniającymi inne elementy wykonawcze, np. zaworami sterującymi siłowników hydraulicznych lub
pneumatycznych. W wyniku takich rozwiązań realizowane jest sterowanie końcowe danym układem lub elementem
procesu.
Rodzaje sterowania:
• sterowanie w układzie otwartym - Oddziaływanie na urządzenie sterujące tak, by pomimo wystąpienia zakłóceń w
czasie realizacji procesu przemysłowego uzyskać pożądaną wartość wielkości wyjściowej;
• sterowanie w układzie zamkniętym - Regulator porównuje wartości wielkości sterowanej z zadaną i wypracowuje
odpowiedni sygnał sterujący
Sterowanie – układ zamknięty:
W zależności od spełnianej funkcji technologicznej rozróżnia się następujące rodzaje sterowania w układzie
zamkniętym:
• sterowanie programowe - sygnał zadający jest ustalany według przygotowanego programu (algorytmu), opartego
np. na tzw. przekaźnikach programowych przy sterowaniu stykowym lub kodzie programu (w urządzeniu cyfrowym);
• sterowanie stałowartościowe — parametr technologiczny (np. ciśnienie w rurociągu) utrzymywany jest w
granicach dopuszczalnego uchybu (zakresu zmian ciśnienia);
• sterowanie nadążne - wartość sygnału wyjściowego przebiega analogicznie jak wartość sygnału wejściowego.

Struktury systemów sterowania:
• Sterowanie lokalne - indywidualne sterowanie procesem;
• Sterowanie zintegrowane - sterowanie z jednego miejsca wielu urządzeń procesu przemysłowego, które określane
jest obecnie jako rozproszone;
• Sterowanie zdalne - sterowanie stosowane w przypadku istnienia większych odległości miedzy urządzeniem
sterującym i sterowany.
Zintegrowane systemy sterowania – budowa:
Elementy składowe zintegrowanych systemów automatyki:
• Czujniki;
• Przemysłowe systemy komunikacyjne;
• Systemy sterowania: sterowniki PLC, Soft-PLC itp.;
• Układy napędowe: sterowanie numeryczne, napędy pozycjonujące itp.;
• Systemy wizualizacyjne: oprogramowanie, panele operatorskie;
• Oprogramowanie inżynierskie: programowanie PLC.
Systemy SCADA:
Systemy SCADA (Supervisory Control and Data Acquisition) – systemy sterowania nadrzędnego i zbierania danych.
Systemy te dopełniają i rozszerzają możliwości sterowników, realizując w warstwie sterowania nadrzędnego
następujące funkcje:
• komunikacji z urządzeniami obiektowymi, takim jak sterowniki, regulatory;
• zbierania i przetwarzania zmiennych procesowych pochodzących z urządzeń obiektowych oraz ich archiwizacji w
bazie danych;
• interfejsu operatora (MMI – man-machine interface) służącego do wizualizacji procesu i jego obsługi (sterowanie
ręczne, zmiany wielkości zadanych);
• wizualizacji wartości zmiennych procesowych (aktualnych i historycznych) w różnych formach graficznych;
• opracowania raportów dotyczących bieżącego stanu procesu, zużycia materiałów oraz stanu pracy maszyn i
urządzeń;
• generowania sygnałów alarmowych związanych z przekroczeniem wartości granicznych;
• diagnostyki zasobów, komunikacji i ewentualnie redundancji.
Rodziny sterowników:
Z uwagi na niekompatybilność sterowników różnych firm powstała koncepcja tzw. rodzin sterowników, polegająca na
podobnym projektowaniu wszystkich modeli sterowników danej rodziny, co umożliwia lepszy dobór sprzętu dla
różnych wielkości instalacji. Poszczególne modele należące do jednej rodziny:
• mogą być programowane w tym samym języku i z użyciem tego samego pakietu programowego;
• mają takie same zmienne programowe oraz taką samą strukturę modułów I/O (moduły, płyty łączeniowe,
drajwery, kable itp.);
• istnieje możliwość przenoszenia programów między modelami oraz korzystania z tych samych opcji w każdym
modelu.
Systemy automatyki firmy SIEMENS:
• Sterowniki: LOGO!, Simatic S7-200-S71200, S7-300-S71500, S7-400;
• Systemy decentralne np. ET200S;
• Oprogramowanie inżynierskie: Step 7;
• Systemy wizualizacyjne HMI: Panele TP, OP, MP;
• Przemysłowe systemy komunikacyjne: AS-I, Profibus, Industrial Ethernet;
• Inteligentne czujniki: BERO, Simatic Machine Vision, SIMODRIVE Sensors;
• Układy napędowe;
• Sterowanie ruchem: Simotion;
Sterowniki PLC:
• Sterownik PLC (ang. Programmable Logic Controller) - jest to elektroniczne urządzenie cyfrowe wykorzystujące
programowalną pamięć w celu przechowania instrukcji (program sterowania) i implementujące funkcje logiczne,
sekwencyjne, czasowe, licznikowe i arytmetyczne do sterowania i regulacji procesów przemysłowych.
Sterowniki programowalne są komputerami przemysłowymi, które pod kontrolą systemu operacyjnego czasu
rzeczywistego:
• zbierają pomiary za pomocą modułów wejściowych z cyfrowych i analogowych czujników oraz urządzeń
pomiarowych;
• korzystając z uzyskanych danych o sterowanym procesie lub maszynie, wykonują programy użytkownika,
zawierające zakodowane algorytmy sterowania i przetwarzania danych;
• generują sygnały sterujące odpowiednie do wyników obliczeń tych programów i przekazują je przez moduły
wyjściowe do elementów i urządzeń wykonawczych.
Typy budowy sterowników PLC:
• Bez własnej obudowy - open frame;
• O budowie kompaktowej – kompletne urządzenie, o ograniczonych możliwościach rozbudowy;
• O budowie modułowej – elastycznie konfigurowane zestawienie jednostki centralnej i modułów wejścia/wyjścia;
• Pośrednie - zalety kompaktowych i modułowych.
Rodzaje sygnałów sterowników PLC:
• Sygnały analogowe – sygnały, które przyjmują dowolną wartość z zakresu ograniczonego górną i dolną wartością
graniczną (np. napięcie stałe z zakresu 0 do 100V). Każda wartość sygnału analogowego oznacza konkretną
informację.
• Sygnały cyfrowe (logiczne) – sygnały, które przyjmują jedną z dwóch umownych wartości (np. 0 lub 1, „mały lub
duży”). Sygnały cyfrowe odzwierciedlają stan wejść i wyjść sterownika, czujników, łączników oraz innych elementów
układu sterowania oraz oddziaływają na człony realizujące określone funkcje logiczne.
Rozkazy w sterownikach PLC:
• Sterownik PLC pracuje według określonego programu sterowniczego.
• Program sterowniczy zawiera ciąg rozkazów logicznych, które sterują pracą urządzenia.
• Tworzenie programu sterowniczego polega na rozłożeniu zadania sterowniczego na pojedyncze rozkazy.
• Rozkaz stanowi najmniejszą część programu sterowniczego.
Procesor sterownika PLC:
• CPU - Central Processor Unit - mikroprocesor i układy otoczenia;
(CPU)
• Stosowane procesory - od prostych 8 bitowych (Modicon Micro) aż do złożonych 32 bitowych (Modicon TSX
Quantum);
• Czasami - układy wieloprocesorowe z procesorami specjalizowanymi.
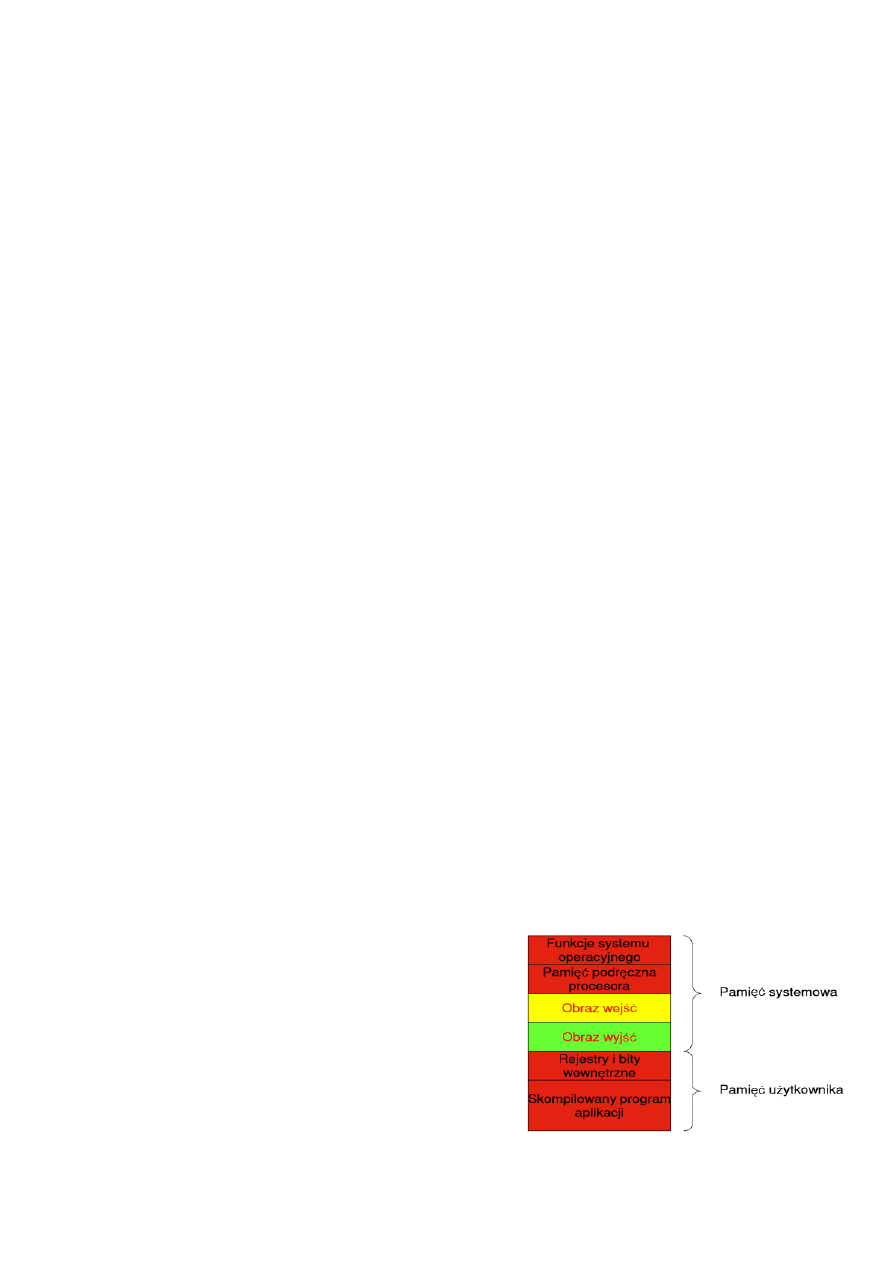
Pamięć sterownika PLC:
• Pamięć typu ROM (Read Only Memory) - pamięć tylko do odczytu,
zachowuje na stałe zawartość. Obecnie najczęściej
typu EPROM lub EEPROM;
(ROM)
• Pamięć typu RAM (Random Access Memory) - do zapisu i odczytu.
Traci zawartość po wyłączeniu zasilania;
(RAM)
Można jej zawartość podtrzymywać bateryjnie;
• Pamięci typu Flash - EEPROM o szybkim kasowaniu i zapisie.

Praca sekwencyjna i cykliczna sterownika PLC:
• praca sekwencyjna - rozkazy programowe są opracowywane kolejno jeden po drugim;
• praca cykliczna - oznacza to, że opracowywanie rozkazów programowych jest ciągle powtarzane. Czas
opracowania wszystkich rozkazów w danym programie nazywany jest czasem cyklu.
• Pełna kontrola sprawności sterownika (PKT) – testowanie układu zasilania, modułów obiektowych, procesora oraz
pamięci danych i programu;
• Kontrola konfiguracji sterownika (KK) – CPU próbuje nawiązać łączność z modułami obiektowymi wykorzystując w
tym celu wszystkie dostępne adresy, pod jakimi mogą się one znajdować;
• Inicjalizacja zawartości pamięci sterownika (IP1, IP2) oraz funkcji użytkowych i systemowych. Zapoczątkowanie
podstawowych warunków lub stanu uruchomieniowego;
• Aktualizuje informację o sterowanym procesie, odczytując stan swych modułów wejściowych (PII);
• Jednorazowo przelicza program użytkowy (PU) sterujący nadzorowanym procesem i wysyła wyliczone decyzje
sterownicze do procesu;
• Aktualizuje stany swych modułów wyjściowych zgodnie z zawartością obrazu wyjść binarnych (PQI);
• Cykliczna kontrola sprawności sterownika (CKT) – kontrola napięć zasilania sterownika, obliczanie sumy kontrolnej
zawartości niewielkiej części pamięci sterownika.
Zjawisko hazardu w układach cyfrowych:
• Hazard - na skutek nieidealności urządzeń technicznych. Synchroniczny cykl pracy eliminuje hazard.
Czujniki podłączane od PLC:
Wykrywanie obecności przedmiotów:
• Czujniki mechaniczne – kontaktowe np. „krańcówki;
• Czujniki indukcyjne – odległość zadziałania:
- wykonanie standardowe: od 0,6 do 20mm;
- wykonanie specjalne: od 1 do 65 mm;
Zalety sterowanie swobodnego programowalnego:
• Standardowe urządzenia, łatwa wymienność,
• Podczas fazy uruchomienia i później zmiany programu są łatwe do przeprowadzenia,
• Zajętość miejsca - wszystkie funkcje logiczne, czasowe, licznikowe zawarte są w sterowniku PLC i niepotrzebne są
dodatkowe styczniki pomocnicze, przekaźniki czasowe itp.
• Reproduktywność programów - istniejący i przetestowany program może być w krótkim czasie skopiowany,
• Dokumentacja - oszczędne sporządzanie dokumentacji wynikające ze stosowania popularnej techniki PC,
• Oszczędność czasu przy projektowaniu, programowaniu i montażu,
• Oszczędność czasu wynikająca z możliwości prowadzenia równolegle prac projektowych i montażowych.
Technika PLC a technika mikroprocesorowa:
• Programowanie PLC skoncentrowane jest na używaniu języków programowania zawierających podstawowe bloki
funkcyjne np. logiczne. Są to języki dużo mniej kompleksowe niż np. asembler, pozwalające na programowanie
osobom o innych profesjach niż informatyk i elektronik.
• Interfejsy wejściowe i wyjściowe zainstalowane są wewnątrz sterownika,
• Obudowy sterowników PLC konstruowane są z uwzględnieniem późniejszych zakłóceń związanych z pracą w
środowisku narażeń przemysłowych np. wibracji, temperatury, hałasu.
• Urządzenia PLC zawierają standardowe interfejsy przemysłowe umożliwiające niezawodne i łatwe do
skonfigurowania połączenia komunikacyjne z innymi urządzeniami.

Norma IEC-61131:
W latach 90-tych Międzynarodowa Komisja Elektrotechniki (IEC – International Electrotechnical Commission) wydała
normę IEC1131 Programmable Controllers, która od 1998r. została oznaczona jako IEC-61131 a następnie przyjęta w
Europie jako EN-61131.
Norma dotyczy sterowników programowalnych oraz związanych z nimi urządzeń peryferyjnych, takich jak:
• narzędzia programujące i uruchomieniowe,
• wyposażenie testujące,
• interfejs człowiek-maszyna (HMI).
Przedmiotem normy jest:
• ustalenie definicji i określenie głównych właściwości istotnych przy wyborze i stosowaniu sterowników
programowalnych i związanych z nimi urządzeń peryferyjnych,
• specyfikacja minimalnych wymagań dotyczących własności funkcjonalnych i konstrukcyjnych, warunków
serwisowania, bezpieczeństwa i testów dla sterowników programowalnych,
• ustalenie definicji i określenie głównych właściwości istotnych przy wyborze i stosowaniu sterowników
programowalnych i związanych z nimi urządzeń peryferyjnych,
• specyfikacja minimalnych wymagań dotyczących własności funkcjonalnych i konstrukcyjnych, warunków
serwisowania, bezpieczeństwa i testów dla sterowników programowalnych,
• zdefiniowanie reguł składni i semantyki dla ogólnie stosowanych języków programowania, zestawu podstawowych
elementów oprogramowania oraz środków, za pomocą których producent może rozbudowywać te podstawowe
zestawy dla własnych implementacji PLC,
• podanie ogólnych informacji i wskazówek dla użytkownika,
• zdefiniowanie zasad komunikacji między sterownikami a innymi systemami elektronicznymi.
Norma IEC-61131 – elementy składowe:
1. Postanowienia ogólne;
2. Wymagania i badania dotyczące sprzętu;
3. Języki programowania;
4. Wytyczne dla użytkownika;
5. Wymiana informacji;
6. Programowanie sterowania z wykorzystaniem zbiorów rozmytych;
7. Wytyczne do implementacji języków programowania.
W normie IEC-61131 wyróżniono następujące obowiązujące elementy języka programowania:
• Typy danych (Data types);
• Elementy organizacyjne oprogramowania (Program Organization Units);
• Funkcje (Functions);
• Bloki funkcyjne (Function blocks);
• Programy (Programs).
W normie IEC-61131 wyróżniono następujące obowiązujące elementy języka programowania:
• Elementy programowania za pomocą grafu sekwencji (SFC);
• Elementy konfiguracji;
• Zmienne globalne (Global variables);
• Zasoby (Resources);
• Zadania (Tasks);
• Ścieżki dostępu (Access paths).
Elementarne typy danych:
Słowo kluczowe
Typ danych
Liczba bitów
BOOL
Boolowski
1
SINT
Liczba całkowita krótka
8
INT
Liczba całkowita
16
DINT
Liczba całkowita podwójna
32
LINT
Liczba całkowita długa
64
USINT
Liczba całkowita krótka bez znaku
8
UINT
Liczba całkowita bez znaku
16
UDINT
Liczba całkowita podwójna bez
znaku
32
ULINT
Liczba całkowita długa bez znaku
64
REAL
Liczba rzeczywista
32
LREAL
Liczba rzeczywista długa
64
TIME
Czas trwania
DATE
Data
TIME OF DAY
Godzina dnia
DATE AND TIME
Data i czas
STRING
Ciąg znaków
BYTE
Bajt – 8 bitów
WORD
Słowo – 16 bitów
DWORD
Słowo podwójne – 32 bity
LWORD
Słowo długie – 64 bity
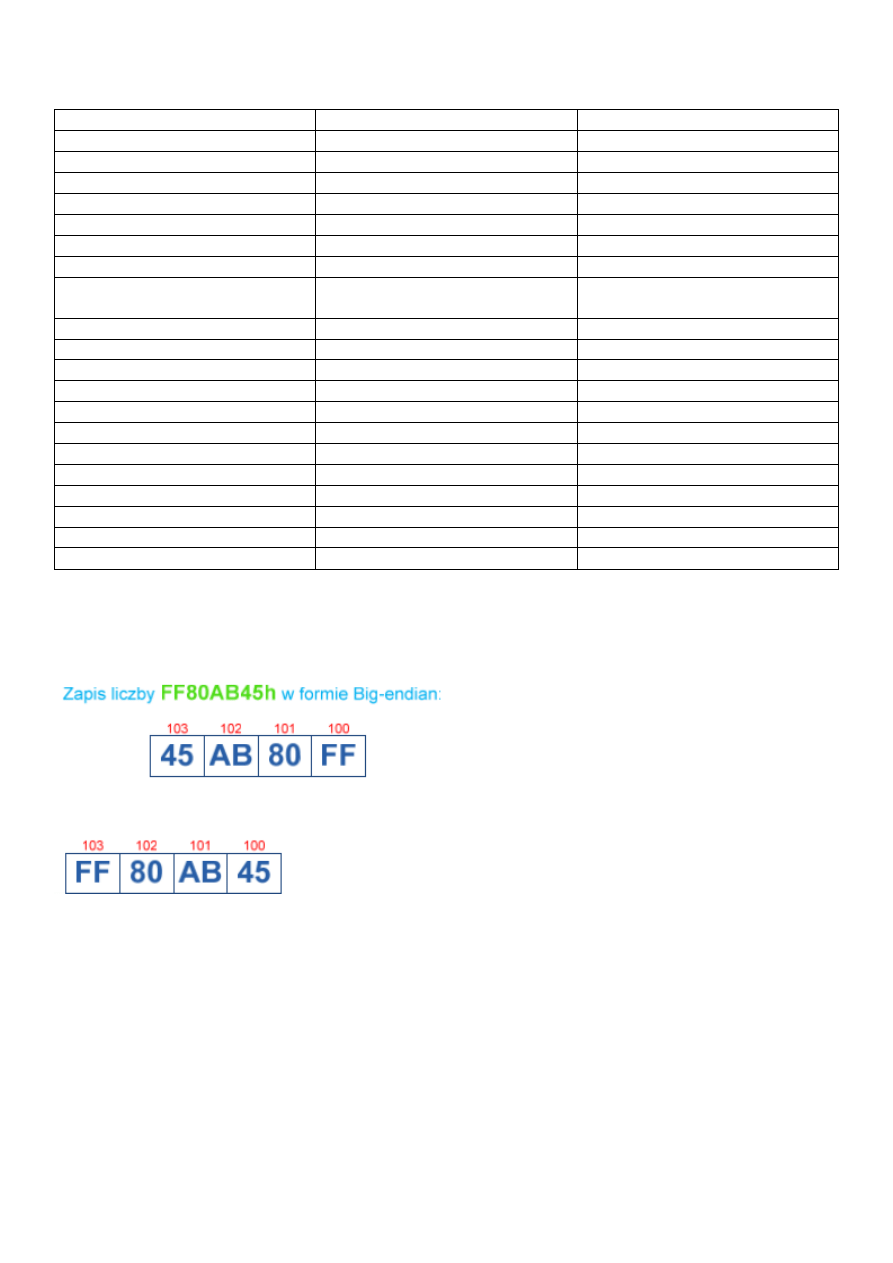
Kolejność bajtów:
• Big endian to forma zapisu danych, w której najbardziej znaczący bajt (high-order byte) umieszczony jest jako
pierwszy. Procesory, które używają formy big endian, to między innymi SPARC, Motorola 68000, PowerPC 970, IBM
System/360, Siemens SIMATIC S7.
• Little endian to forma zapisu danych, w której mniej znaczący bajt (loworder byte) umieszczony jest jako pierwszy.
Procesory, które używają formy little endian, to między innymi wszystkie z rodziny x86, OMRON.
Sterowniki PLC – języki programowania:
Sterowniki PLC programowane są za pomocą specjalnych urządzeń mikrokomputerowych zwanych programatorami
lub komputerów PC z zainstalowanym oprogramowaniem narzędziowym (język programowania).
Języki programowania sterowników można podzielić na dwie grupy:
• języki tekstowe;
• języki graficzne.
Języki tekstowe:
• Lista instrukcji IL (ang. Instruction List)
(IL)
- jest językiem niskiego poziomu, zbliżonym do języka typu asembler.
Program w tym języku jest zestawem instrukcji mnemotechnicznych realizujących algorytm sterowania. Język
wykorzystuje zbiór instrukcji, obejmujących operacje logiczne, arytmetyczne, relacji, funkcje przerzutników,
czasomierzy, liczników itp. Język tego typu może znaleźć zastosowanie w programowaniu małych i prostych aplikacji.
• Język strukturalny ST (ang. Structured Text)
(ST)
- jest odpowiednikiem algorytmicznego języka wyższego poziomu,
zawierającego struktury -programowe takie jak: If, then, else, end_if, for, to, do, end_for, while, ,end_while. Język
tego typu może być używany do obliczania złożonych wyrażeń, zawierających wielkości analogowe i binarne.
Języki graficzne:
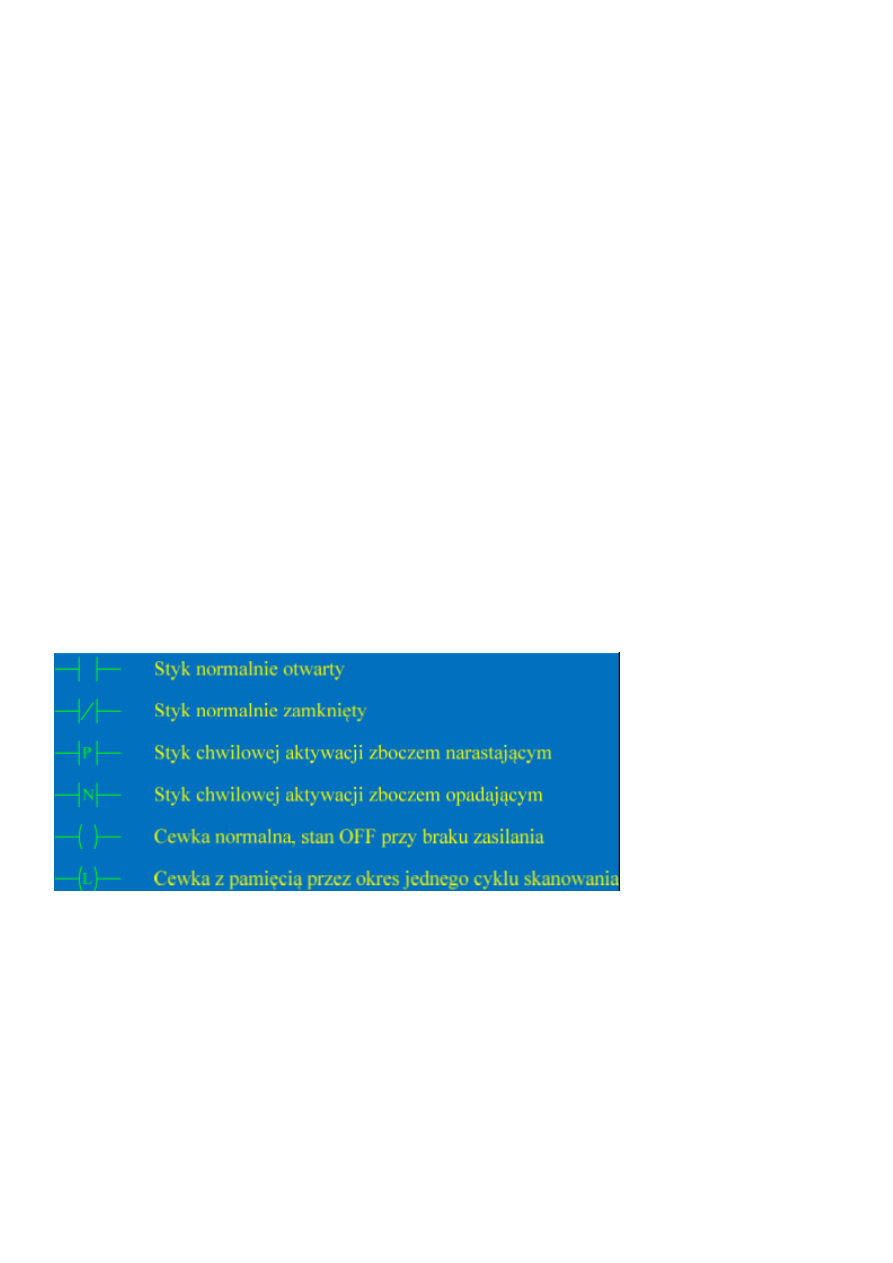
• Język schematów drabinkowych LD (ang. Ladder Diagram)
(LD)
- bazuje na symbolach logiki stykowo-
przekaźnikowej. Podstawowymi symbolami języka są styki (elementy wejściowe), wyjścia dwustanowe
(odzwierciedlenie cewek przekaźnika) oraz bloki funkcyjne (liczniki, timery, operacje matematyczne, etc).
• Język bloków funkcyjnych FBD (ang. Function Block Diagram)
(FBD)
- jest wzorowany na schematach blokowych
układów scalonych. Realizacja programu w języku FBD opiera się na przepływie sygnału. Przepływ sygnału następuje
z wyjścia funkcji lub bloku funkcyjnego do przyłączonego wejścia następnej funkcji lub bloku funkcyjnego.
Język drabinkowy Ladder (LD):
• Rozpoczynając naukę programowania sterowników PLC, szczególnie w języku LD, nie można pominąć genezy tego
języka, a mianowicie schematów przekaźnikowo-stykowych, układów sterowania.
• Podstawowymi elementami wykorzystywanymi w tych układach były elektromechaniczne przekaźniki i styczniki.
• W chwili obecnej urządzenia te w dużej mierze zostały zastąpione przez łączniki elektroniczne, wykorzystujące
tranzystory, tyrystory bądź triaki, zarówno w obwodach sterujących jak i w układach wysokoprądowych.
Rodzaje instrukcji języka drabinkowego (LD):
• Instrukcje stykowe - służą do przeprowadzania operacji logicznych na bitach. W szczególności, ich zadaniem jest
umożliwienie komunikacji z wejściami i wyjściami binarnymi sterownika.
• Instrukcje bloków funkcyjnych - służą do uproszczenia programowania poprzez sprowadzenie bardziej
skomplikowanych operacji lub zadań do jednego bloku, którego warunki działania są określone przez instrukcje
stykowe. Przykładem tego typu bloków mogą być liczniki programowalne, timery, regulatory, itp.
(cewka, styk)
Język (ST) – tekst strukturalny:
Język ST należy do grupy języków tekstowych, podobnie jak (IL). Jest to język wyższego poziomu, ponieważ nie używa
się w nim operatorów, które są zorientowane maszynowo, ale pewnych abstrakcyjnych poleceń, opisujących w
skondensowany sposób działanie sterownika. Podstawowymi elementami tego języka są:
• wyrażenia,
• instrukcje.
Instrukcje oddziela się średnikami, w jednej linii może występować większa liczba instrukcji.

• Wyrażenie (expression) stanowi element instrukcji, który z chwilą wykonania dostarcza wartość odpowiadającą
jednemu z typów zdefiniowanych danych. Wyrażenie składa się z operandów i operatorów języka (ST).
• Operandem może być zmienna (jedno- lub wieloelementowa), stała, literał, wywoływana funkcja lub inne
wyrażenie.
• Operatory określają działanie, jakie ma być wykonane.
• Przykłady operatorów: NOT, AND, OR, XOR, * , / , MOD , + , - , < , > , <= , >= , = , <>.
Instrukcja przypisania zastępuje wartość bieżącą zmiennej (pojedynczej lub wieloelementowej) wynikiem obliczenia
wyrażenia (zmienna := wyrażenie).
Pozostałe instrukcje:
• instrukcje wywołania bloku funkcjonalnego i powrotu;
• instrukcje wyboru (IF, CASE);
• instrukcji iteracji (FOR, WHILE, REPEAT, EXIT);
W języku (ST) nie ma instrukcji skoku, gdyż instrukcja ta nie odpowiada zasadom programowania strukturalnego
sformułowanym przez Dijkstra, który wykazał, że liczba błędów w programie rośnie wraz z liczbą wprowadzonych
instrukcji skoku.
Sterowanie sekwencyjne:
Początkowo, gdy systemy sterownikowe były stosunkowo małe, do opisu działania automatów sekwencyjnych
stosowano dwie metody:
• Pierwsza metoda polegała na przedstawieniu sekwencyjnych układów asynchronicznych w postaci grafów przejść
lub tablicy stanów. Opisy takie prezentują automat w sposób niezależny od jego realizacji sprzętowej.
• Druga metoda modelowania układu sekwencyjnego wiązała się ściśle z jego realizacją fizyczną. Powszechnie
stosuje się tu przedstawienie automatu w formie schematów drabinkowych, bazujących na graficznej analogii do
schematów układów przekaźnikowych.
Sterowanie sekwencyjne – GRAFCET:
Na początku lat siedemdziesiątych pojawiła się potrzeba modelowania złożonych systemów sterowania
sekwencyjnego do celów projektowania programów sterownikowych. W 1977 roku grupa 24 naukowców i
praktyków związanych z firmą Telemechanique opracowała opis systemu sekwencyjnego, któremu nadano nazwę
GRAFCET.
Sposób tworzenia opisu systemu w postaci GRAFCET został zaczerpnięty z tzw. sieci Petriego, opracowanych w latach
sześćdziesiątych. Sieci Petri są graficznym narzędziem, umożliwiającym modelowanie współbieżnych działań
sekwencyjnych
Sterowanie sekwencyjne (SFC):
• W normie IEC 61131-3 opierając się na formalizmie zaproponowanym w metodzie GRAFCET, zdefiniowano sposób
opisu działania sterownika w postaci tzw. sekwencyjnego schematu funkcjonalnego (SFC – Sequential Function
Chart).
• Schemat ten opisuje zadanie sterowania sekwencyjnego za pomocą sieci zawierających kroki (etapy) i warunki
przejścia (tranzycji) między tymi krokami.
• Ten sposób programowania służy przede wszystkim tworzeniu odpowiedniej struktury wewnętrznej programu
użytkownika i może być wykorzystywany do programowania w różnych językach (FBD, IL, LD itp.).
(SFC) – Sekwencyjny schemat funkcjonalny:
• Sekwencyjny schemat funkcjonalny umożliwia podział programu użytkownika na mniejsze elementy, między
którymi następuje przepływ sygnałów sterujących. Elementami tymi są kroki (steps) i przejścia (transitions)
wzajemnie powiązane za pomocą połączeń bezpośrednich (direct links). Tworzą one sieć (network), która stanowi
podstawową strukturę w schemacie SFC, podobne jak obwody w językach graficznych.
• Z każdym krokiem jest skojarzony odpowiedni zbiór instrukcji, które nazywa się akcjami (actions), a każdemu
przejściu między krokami towarzyszy warunek przejścia (transition condition).
(SFC) – kroki:
• Krok (step) określa sytuacje, w której zachowanie się fragmentu programu w odniesieniu do jego wejść i wyjść jest
zdefiniowane poprzez skojarzony z krokiem zestaw akcji. Krok może być aktywny (active) lub nieaktywny (inactive).
• W dowolnej chwili stan programu jest określony przez zbiór aktywnych kroków oraz wartości zmiennych
wewnętrznych i wyjściowych.
• Aktywność danego kroku jest określona przez zmienną typu BOOL, która przyjmuje stan „1” dla kroku aktywnego
oraz „0” dla kroku nieaktywnego
(SFC) – przejścia:
• Przejście (transition) opisuje warunek przepływu sterowania z jednego lub wielu kroków poprzedzających do
jednego lub wielu kroków występujących bezpośrednio za przejściem.
• Z każdym krokiem jest skojarzony warunek przejścia (transition condition), który jest wynikiem rozwiązania
pojedynczego wyrażenia boolowskiego.
• Warunek przejścia zawsze prawdziwy oznacza się wartością „1” lub słowem kluczowym „TRUE”.
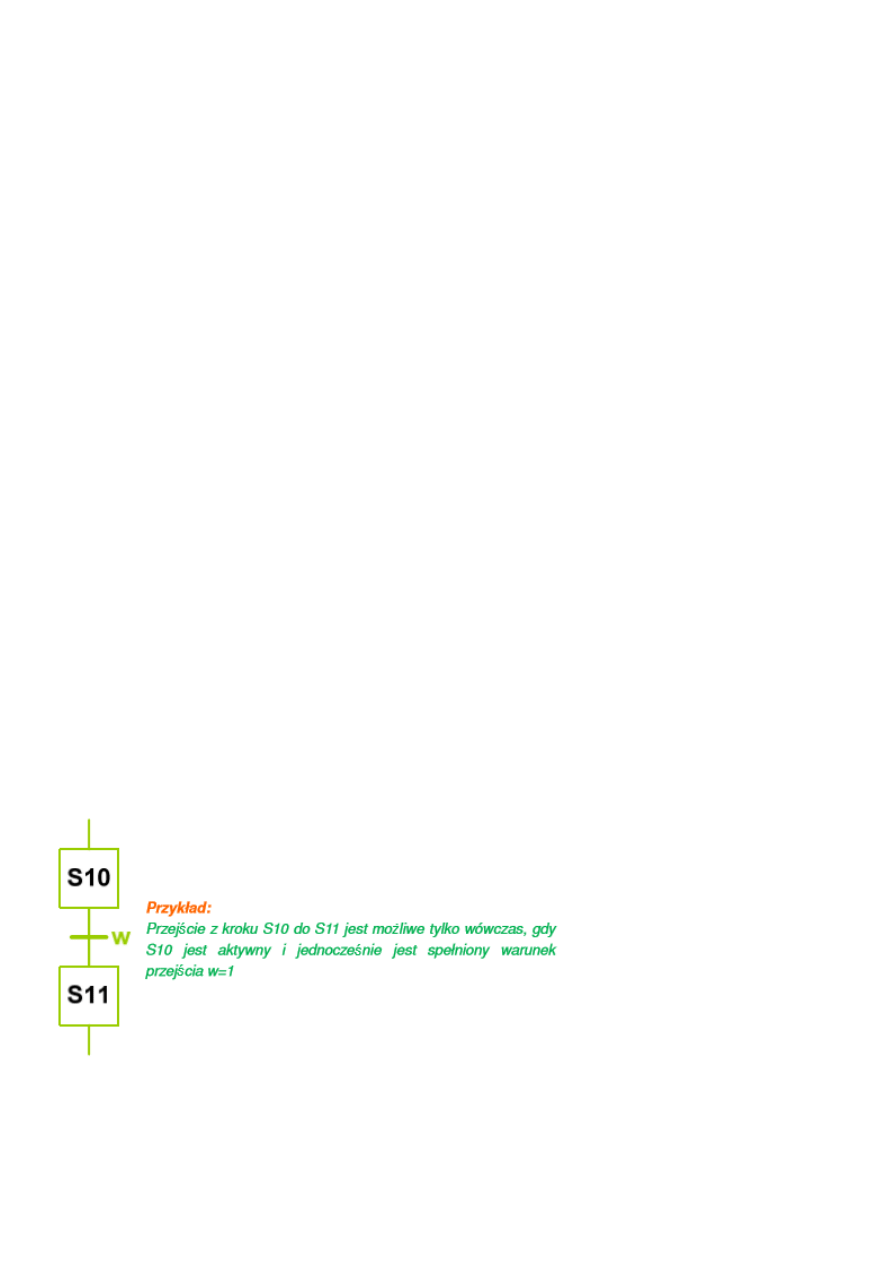
(SFC) – sekwencje kroków i przejść:
Przejście jest dozwolone tylko wówczas, gdy wszystkie bezpośrednio poprzedzające je kroki są aktywne.
Jeżeli przejście jest dozwolone i jednocześnie jest spełniony związany z nim warunek przejścia, to następuje:
• kasowanie przejścia;
• dezaktywacja wszystkich bezpośrednio poprzedzających przejście kroków;
• aktywacja wszystkich kroków bezpośrednio występujących po przejściu;
Sekwencja pojedyncza - kroki i przejścia powtarzane są kolejno po sobie. Stosuje się tu 2 zasady:
• dwa kroki nie mogą występować bezpośrednio po sobie – muszą być rozdzielone przejściem.
• dwa przejścia nie mogą występować bezpośrednio po sobie - muszą być rozdzielone krokiem.
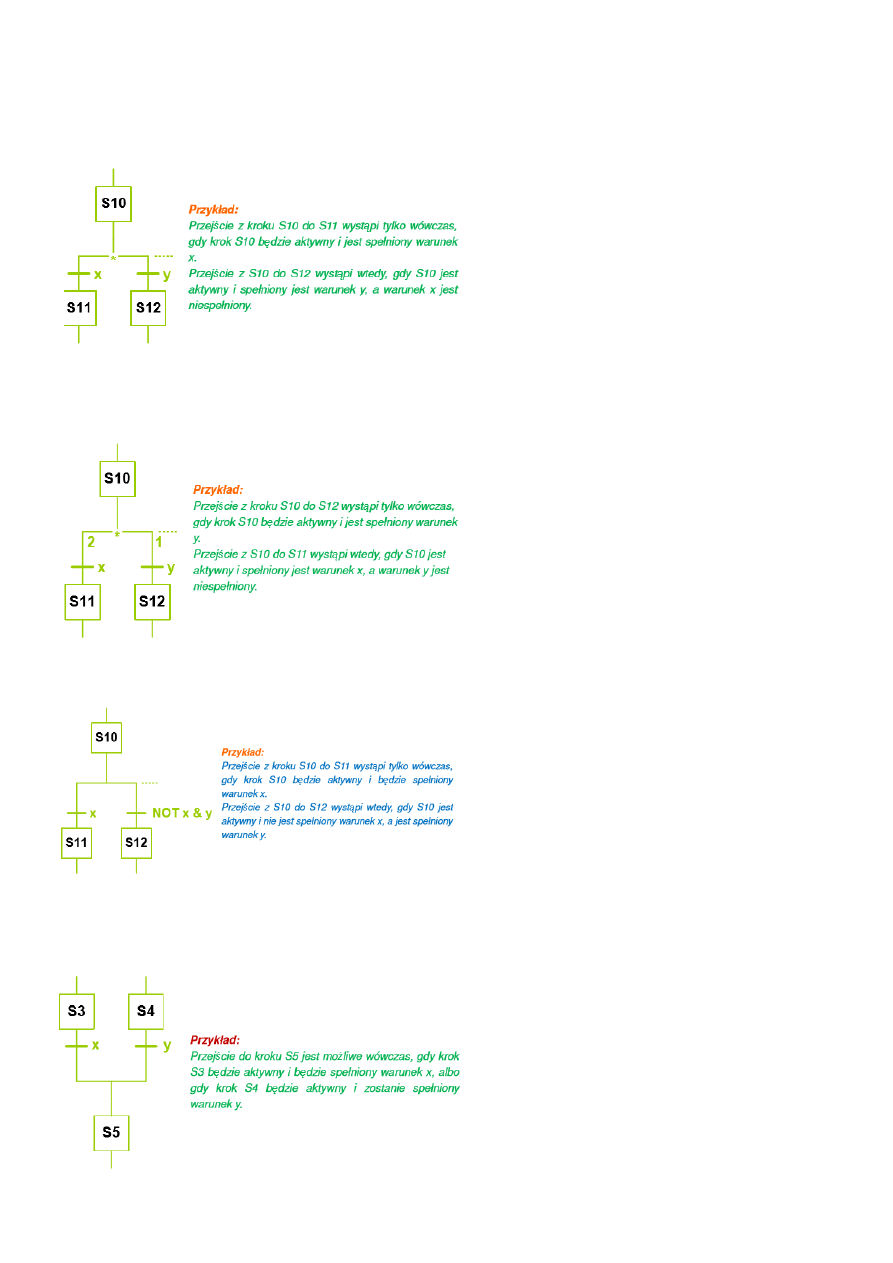
Wybór sekwencji – rozbieżność:
• wybór między różnymi sekwencjami jest reprezentowany przez tyle przejść umieszczonych pod linią poziomą, ile
jest możliwych sekwencji.
• gwiazdka oznacza pierwszeństwo wyboru od lewej strony do prawej.
Wybór sekwencji – rozbieżność:
• Gwiazdka i numerowane gałęzie wskazują na zadeklarowane pierwszeństwo sprawdzania przejścia. Gałęzie o
niższym numerze maja wyższy priorytet.
Wybór sekwencji – rozbieżność:
• Połączenie gałęzi oznacza, że kolejne warunki przejścia muszą się wzajemnie wykluczać.
Wybór sekwencji – zbieżność:
• Wszystkie sekwencje kończą się symbolami przejścia umieszczonymi nad linią poziomą.
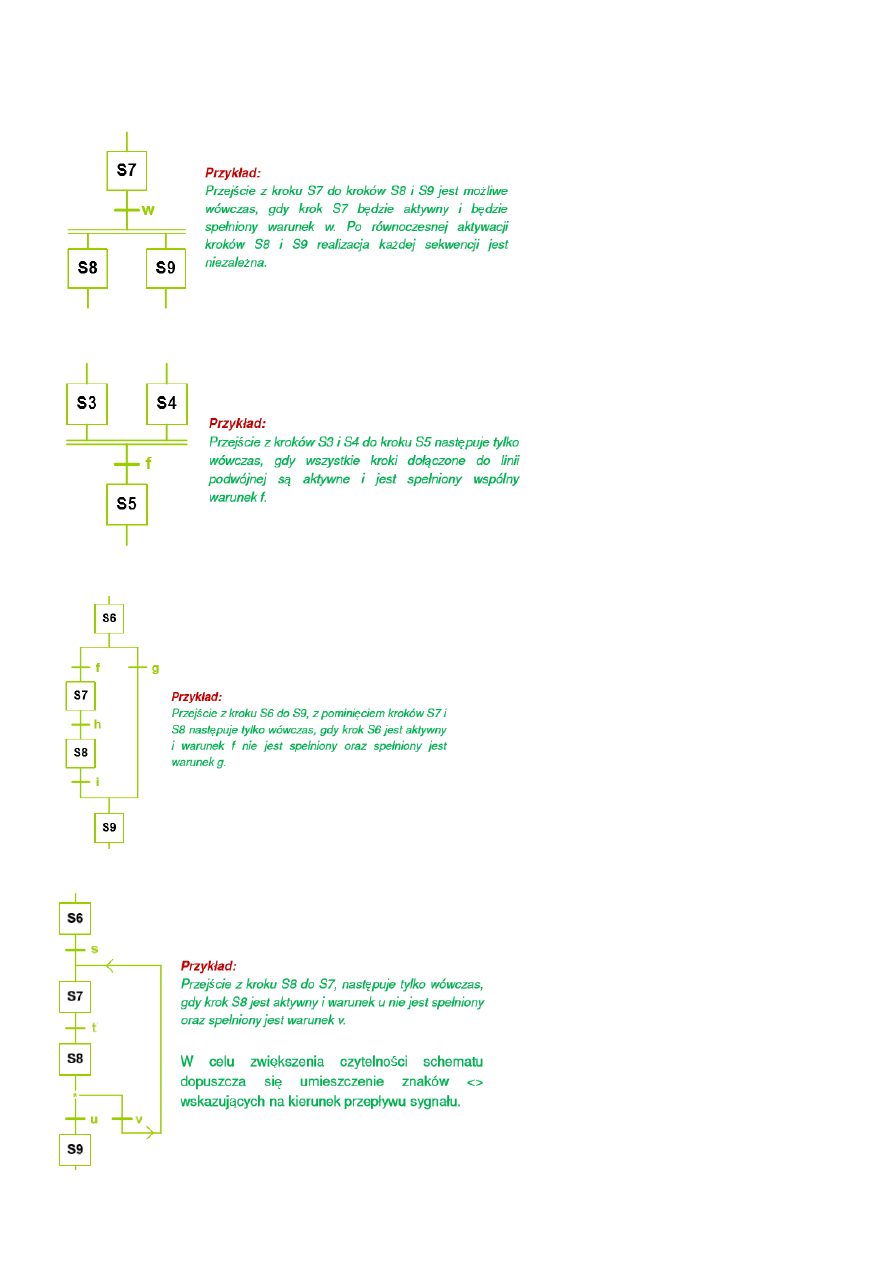
Sekwencje równoczesne – rozbieżność:
• Występuje tu jeden wspólny symbol przejścia umieszczony nad podwójną linią poziomą.
Sekwencje równoczesne – zbieżność
• Występuje tu jeden wspólny symbol przejścia umieszczony bezpośrednio podwójną linią poziomą.
Przeskok sekwencji
• Jest to szczególny przypadek wyboru sekwencji, gdy któraś z gałęzi nie zawiera żadnego kroku.
Pętla sekwencji
• Jest to szczególny przypadek wyboru sekwencji, gdy któraś z gałęzi wraca do kroku poprzedniego.
Akcje i bloki akcji:
Gdy krok jest aktywny, to powinny być wykonane pewne, związane z nim działania. Działania te są deklarowane w
postaci tzw. akcji (actions) i kojarzone z krokiem za pomocą bloków akcji. W najprostszym przypadku akcja może być
wyrażona przez przypisanie wartości do zmiennej boolowskiej. Akcje bardziej rozbudowane mogą być opisane za
pomocą podprogramów napisanych w językach tekstowych lub graficznych, a nawet w postaci innych programów
(SFC).
Zarządzanie wykonywaniem akcji może być zrealizowane za pomocą stowarzyszonych z nimi kwalifikatorów
(qualifiers), które oddziałują w odpowiedni sposób na flagę skojarzonego z akcją kroku. Kwalifikatory akcji
specyfikują, w jaki sposób określona akcja ma być uruchomiona i z jakimi ewentualnymi ograniczeniami czasowymi.
Kwalifikatory akcji:
(brak)
Nie zapamiętywany (kwalifikator pusty). Akcja jest
wykonywana tylko wówczas, gdy skojarzony krok jest
aktywny.
(N)
Nie zapamiętywany. Akcja jest wykonywana tylko
wówczas, gdy skojarzony krok jest aktywny.
(R)
Nadrzędne kasowanie (overriding reset). Akcja, która
była ustawiona w innym kroku jest kasowana.
(S)
Ustaw (set) – zapamiętywany. Akcja będzie
wykonywana, nawet jeśli krok stanie się nieaktywny.
Akcja powinna być kasowana w innym kroku przez
użycie kwalifikatora R.
(L)
Ograniczony w czasie (time limited). Akcja jest
wykonywana przez zadany czas, chyba, że wcześniej
skojarzony z nią krok stanie się nieaktywny.
(D)
Opóźniony w czasie (time delayed). Określa opóźnienie
z jakim należy usunąć akcję, która będzie dalej
wykonywana aż do końca aktywność danego kroku.
Jeśli krok stanie się nieaktywny przez upływem
zadanego czasu, to skojarzona z nim akcja nigdy nie
będzie wykonana.
(P)
Impuls (Pulse). Akcja jest ustawiona tylko na jeden cykl
sterownika, bez względu na to czy skojarzony z nią krok
pozostanie aktywny.
(SD)
Zapamiętywany i opóźniony/ Kombinacja
kwalifikatorów S i D. Akcja zostanie ustawiona po
zadanym czasie i zapamiętana.
(DS)
Opóźniony i zapamiętany. Kombinacja kwalifikatorów D
i S. Ustawienie i zapamiętanie nastąpi po zadanym
czasie.
(SL)
Zapamiętywany i ograniczony w czasie. Akcja jest
wykonywana przez zadany czas, bez względu na to, czy
skojarzony z nią krok pozostaje aktywny.
Właściwości (SFC) – podsumowanie:
1. Program napisany w SFC składa się z jednej lub kilku sieci, w których występują kroki, przejścia i połączenia
między nimi:
• Kroki i przejścia występują naprzemiennie, nie można łączyć kroku z krokiem i przejścia z przejściem.
• Z każdym przejściem związane są warunki przejścia.
• Z krokami skojarzone są odpowiednie akcje, których warunki wykonania opisują kwalifikatory. W najprostszym
przypadku akcję może stanowić zmienna boolowska, ale może ją tworzyć zestaw instrukcji w dowolnym języku.
2. Z chwilą wywołania programu zawierającego strukturę w SFC jest aktywowany krok początkowy sieci. W każdej
sieci może być tylko 1 krok początkowy
• Dla każdego aktywnego kroku, po wykonaniu przypisanych mu akcji następuje sprawdzenie warunków przejścia dla
przejścia znajdującego się bezpośrednio po kroku. Przejście występujące za krokiem aktywnym nosi nazwę przejścia
dozwolonego.
• Jeżeli warunki przejścia dla przejścia dozwolonego są spełnione, to krok poprzedzający przejście staje się
nieaktywny, przejście jest kasowane, a krok występujący za przejściem jest aktywowany.
• Jeżeli warunki przejścia są niespełnione, tp krok poprzedzający pozostaje aktywny.
3. Wykonanie kroków aktywnych podlega następującym regułom:
• Po aktywacji krok jest wykonany co najmniej raz, włączając w to wszystkie skojarzone z nim akcje.
• Po dezaktywacji kroku wszystkie skojarzone z nim akcje są wykonywane ostatni raz, w celu zapewnienia
właściwego zakończenia akcji, np. zatrzymania czasomierzy, wyzerowania zmiennych
• Flaga kroku ma wartość TRUE dla każdego wykonania aktywnego kroku, z wyjątkiem tego ostatniego wykonania po
dezaktywacji.
Algebra Boole’a, Boola:
Fundamentem teoretycznym dla techniki cyfrowej jest algebra Boole'a. Jej podstawy przedstawił matematyk
angielski George Boole w opracowaniu pt. "An Investigation of the Laws of Thought" z 1854 roku. Dzieło to
przeleżało na półkach ponad pół wieku, zanim znalazło zastosowanie w technice do analizy i syntezy układów
przełączających. Teoria układów logicznych wykorzystuje również pewne wyniki osiągnięte w XIX wieku w dziedzinie
logiki teoretycznej przez takich matematyków jak de'Morgan czy też Polak Łukasiewicz, który jest twórcą znanego i
stosowanego do dziś sposobu zapisu algorytmu, określanego jako tzw. odwrotna notacja polska.
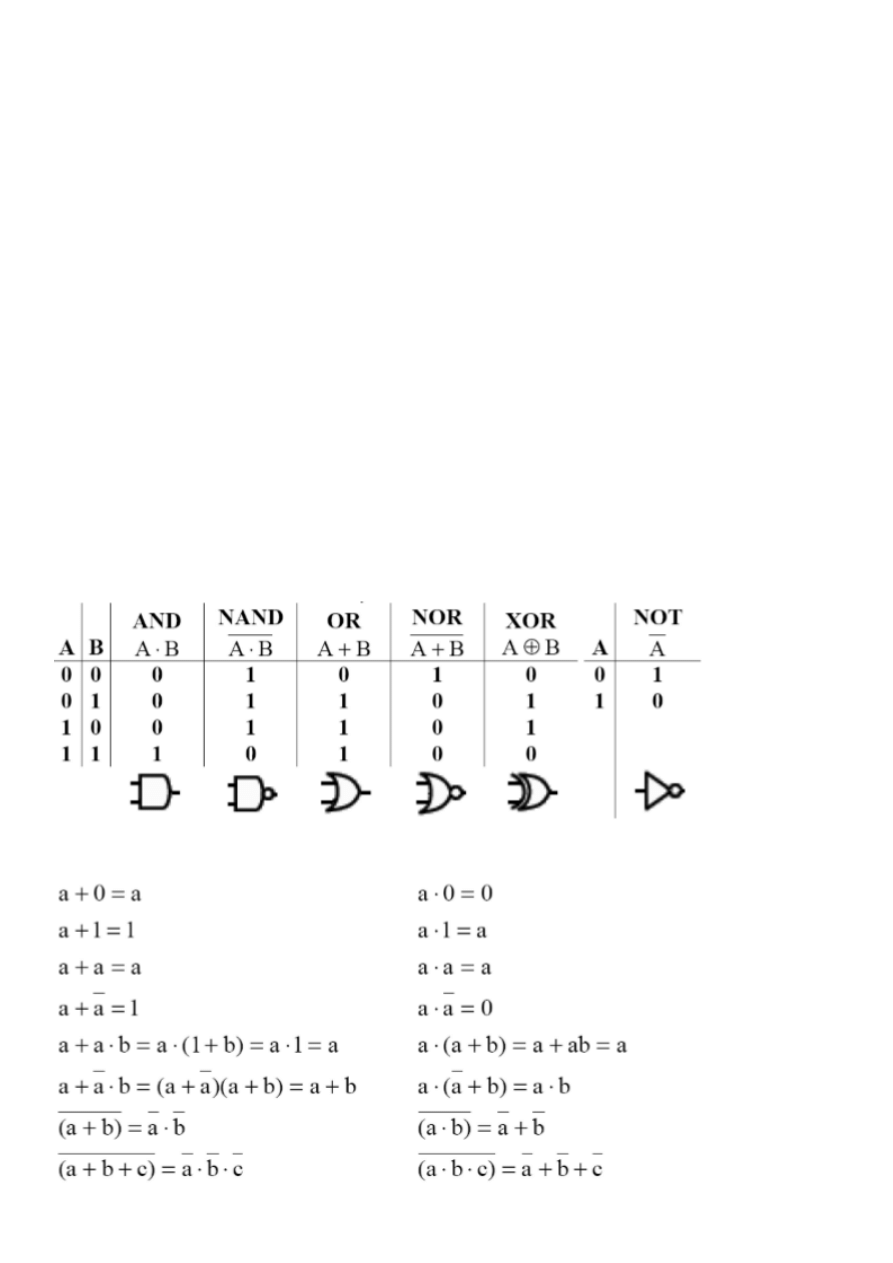
Podstawowe funktory logiczne:
(AND), (NAND), (OR), (NOR), (XOR), (NOT):
Algebra Boole’a – podstawowe twierdzenia:
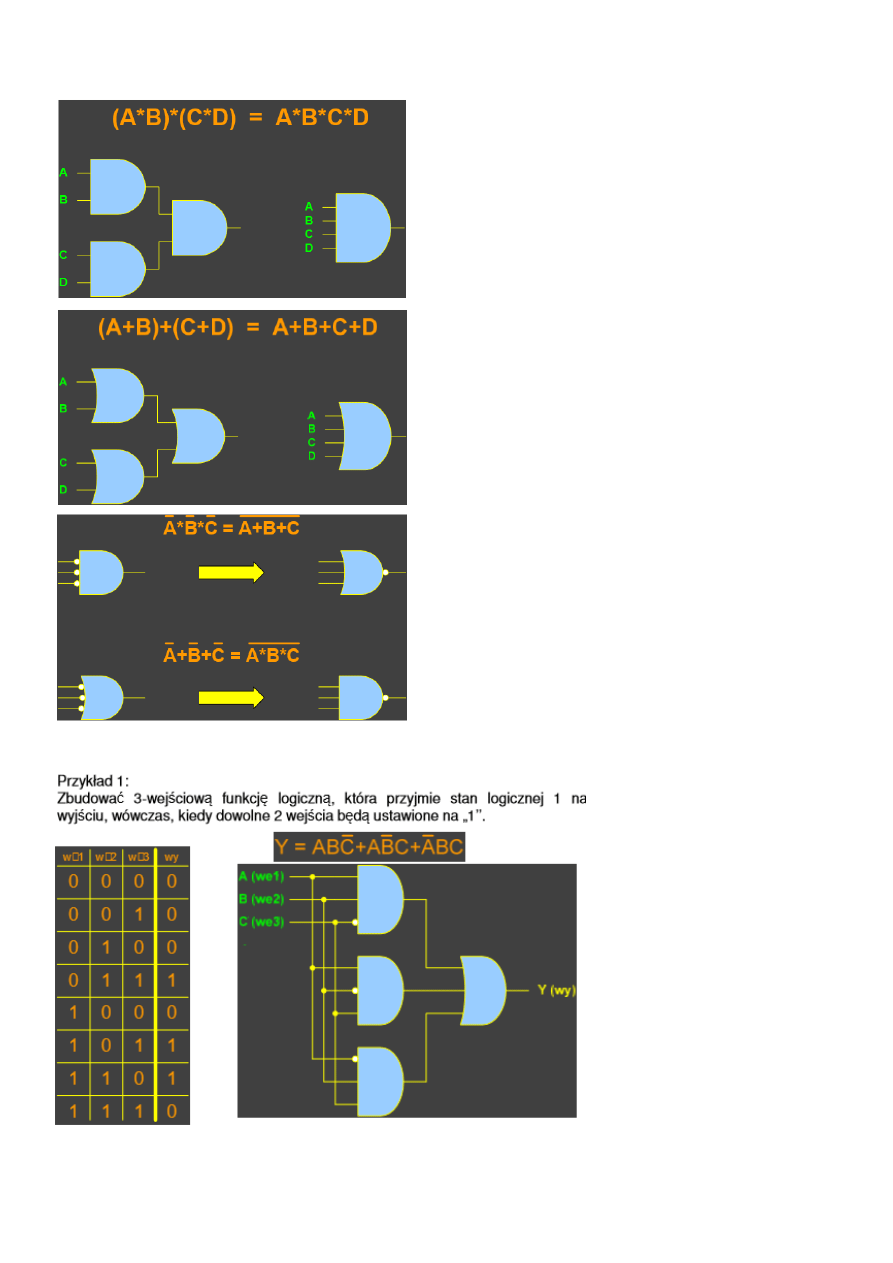
Algebra Boole’a – uproszczenia:
Realizacja złożonych funkcji logicznych:
Minimalizacja funkcji boolowskich:
• Ważnym zagadnieniem w teorii sieci jest minimalizacja. Zagadnienie to można sformułować następująco: daną
funkcję Boole'a zapisaną w postaci kanonicznej przedstawić w postaci takiego wyrażenia boolowskiego, aby funkcja
kosztów była w minimum.
• Funkcja kosztów może być zdefiniowana w rozmaity sposób. Najczęściej jednak sprowadza się do tego, że w
wyrażeniu powinna występować jak najmniejsza liczba elementów (zmiennych oraz operatorów).
W rozwiązywaniu zadania minimalizacji stosowane są różne metody:
• metoda algebraiczna, wykorzystująca podstawowe własności algebry Boole’a,
• metoda tablic Karnaugha.
• algorytm minimalizacji Quina - McCluskeya.
Wejściowa bramka (XOR):
Wielowejściowa bramka XOR jest wykorzystywana w układach kontroli parzystości bitów. Wyjście bramki przyjmuje
stan „1” wtedy, gdy na wejściach bramki jest nieparzysta liczba stanów „1”. Poniżej przedstawiono przykłady
wybranych kombinacji stanów logicznych dla 5wejściowej bramki XOR.
Rodzina sterowników SIMATIC:
• Micro Automatyka:
- Małe systemy kompaktowe;
- Proste programowanie;
- Zastosowanie w prostych aplikacjach.
• Totally Integrated Automation (TIA):
- Wspólne zarządzanie danymi, konfiguracją i komunikacją;
- Wysoka wydajność;
- Efektywne programowanie z językami wysokiego poziomu.
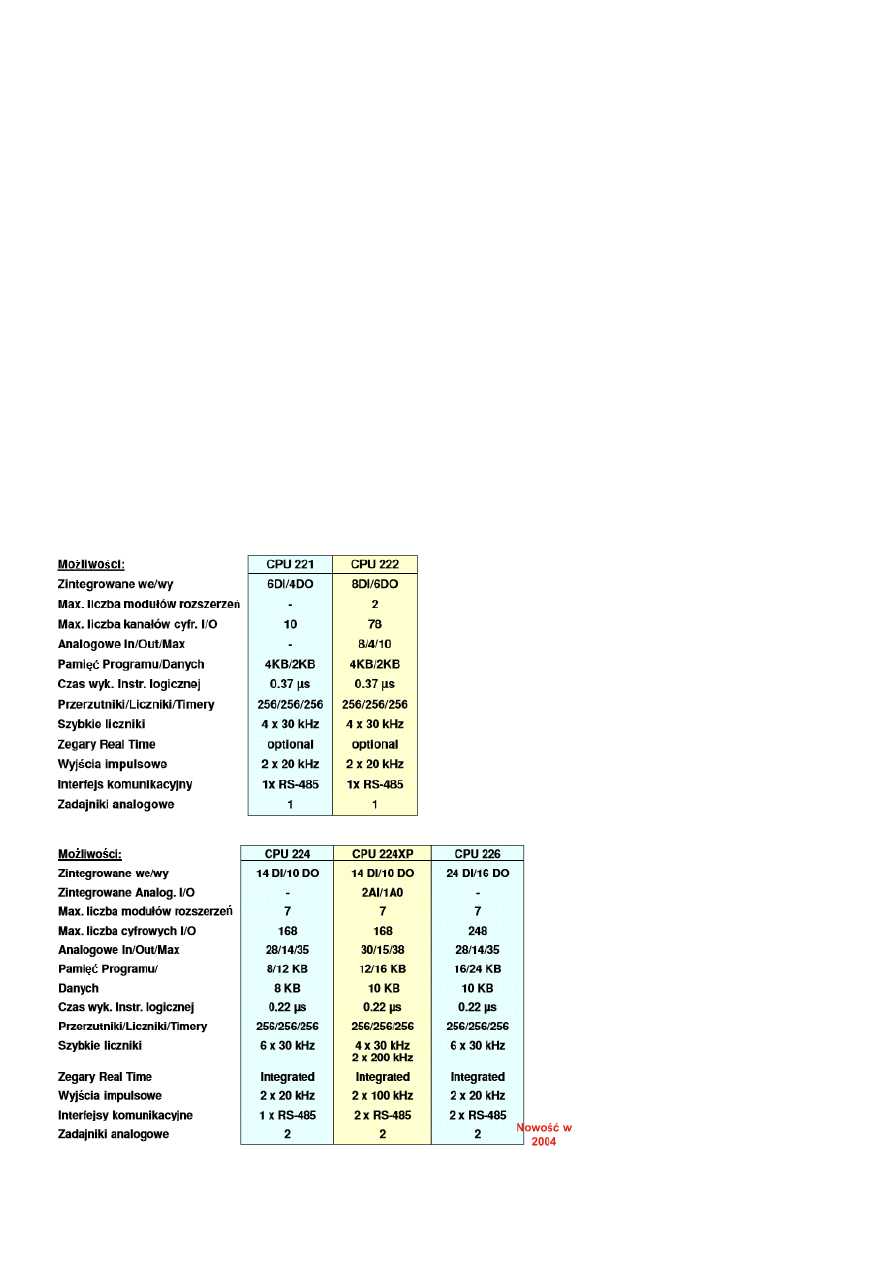
S7-200 – Druga generacja:
- CPU 221 (10 punktów I/O);
- CPU 222 (14 punktów I/O);
- CPU 224 (24 punkty I/O); - ulepszony w 2004
- CPU 224XP (24 punkty I/O); - nowość 2004
- CPU 226 (40 punktów I/O); - ulepszony w 2004
Porównanie CPU 221 i CPU 222:
Porównanie CPU 224, CPU 224XP i CPU 226:
Standardy S7-200:
- European Community;
- Underwrites Laboratory Canada & United States;
- Factory Mutual Approved;
- C-Tick for Australia & New Zealand;
Atesty morskie:
- Lloyds Register of Shipping (LRS);
- American Bureau of Shipping (ABS);
- Det Norske Veritas (DNV);
- German Lloyd (GL);
- Nippon Kaiji Kyokai (NK);
- Bureau Veritas (BV);
- Polski Rejestr Statków.
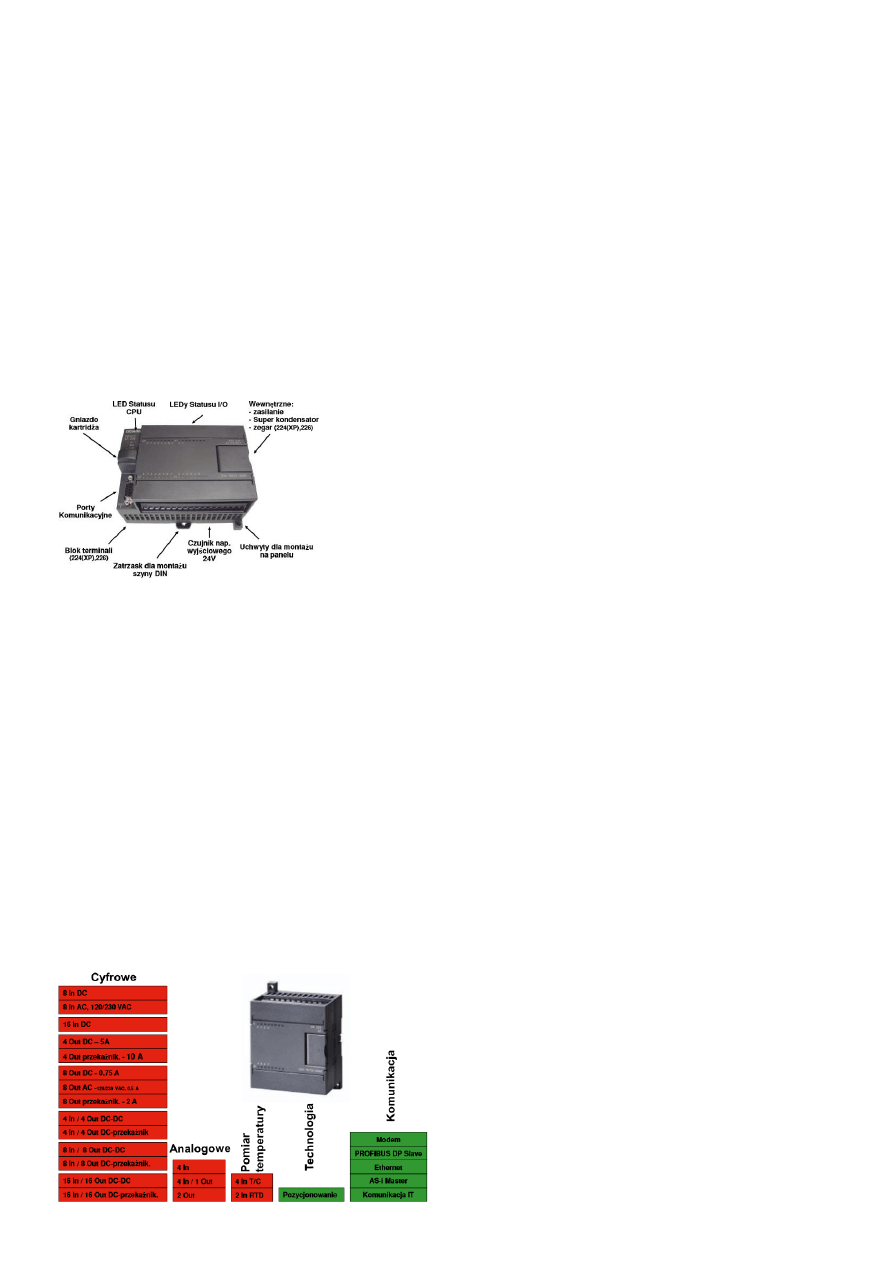
Jednostka centralna S7-200:
Moduł baterii i zegara:
- Zegar RTC i kalendarz (dla 221, 222 CPU);
- Typowo 200 dni backupu.
Moduł baterii:
- Backup dla danych wewn. (data block);
- Typowo 200 dni backupu.
Moduł pamięci:
- Dla transferu programu i backupu pam. danych i programu.
SIMATIC S7-200 – Diagnostyczne LED:
- Diagnostyczne LED wspólne z System Fault LED;
- Zmienny kolor LED (RED/YELLOW) w zależności od błędu;
- Diagnostyczne LED kontrolowane przez system operacyjny i program użytkownika (Instrukcje diagnostyczne).
SIMATIC S7-200 – Moduły rozszerzeń I/O:
- Od 2 Modułów rozszerzeń (EM) dla CPU 222 ….do 7 modułów dla CPU 224/226;
- Demontowalne terminale dla cyfrowych modułów I/O;
- Połączenie modułów I/O przez tzw. Ribbon Cable.
SIMATIC S7-200 – Moduł pozycjonowania (EM 253):
• Umożliwia wydajne sterowanie
- Konfigurowalna kompensacja luzu;
- Operacje ciągłe.
• Wspomaga:
- Jerk (krzywa S) lub Liniowe przyspieszenie/zwalnianie (Linear acceleration and deceleration);
- Wspiera różne metody sterowania położeniem (absolute, relative and manual).
• Proste programowanie i komunikacja (tzw. Wizardy – Motion Control Wizard).
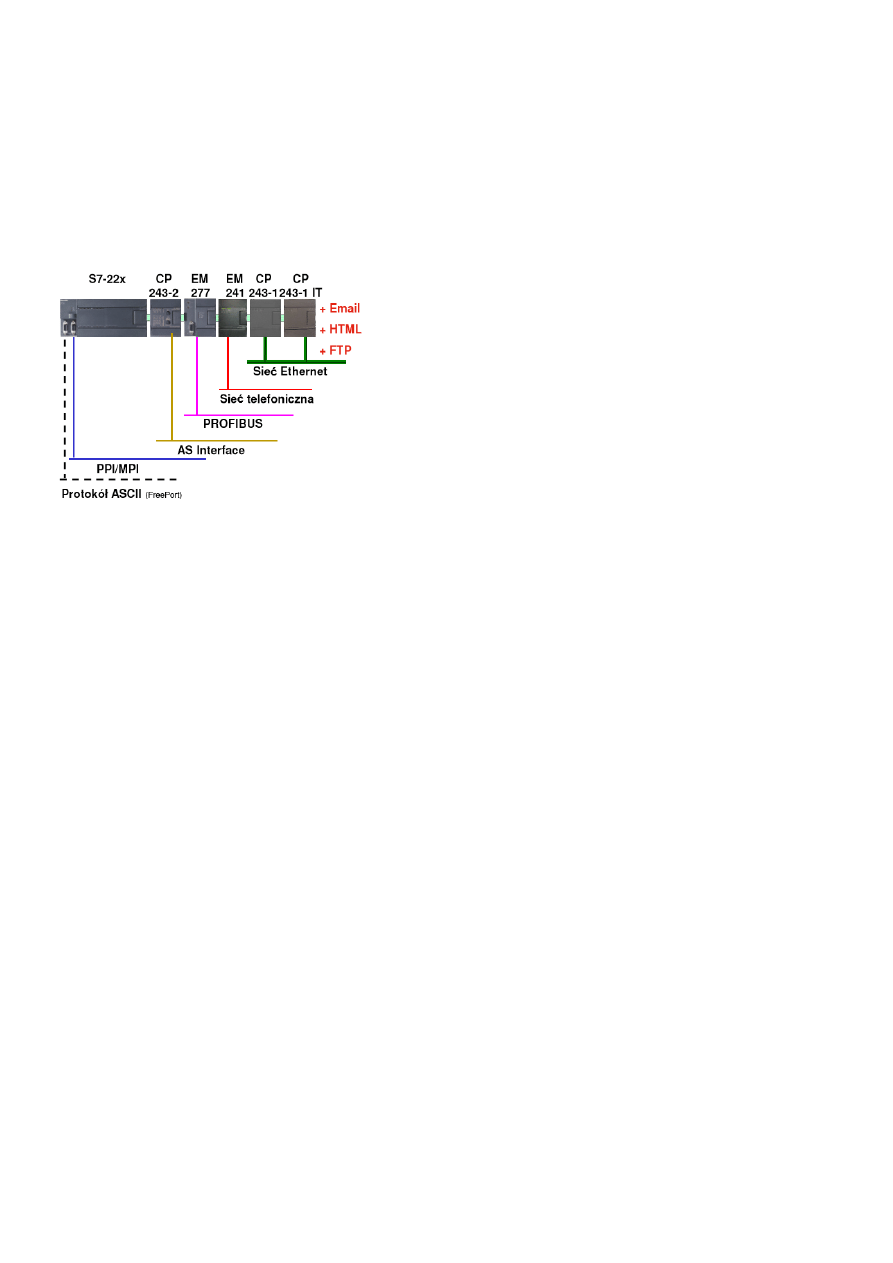
Możliwości sieciowe S7-200:
Moduł modemu (EM 241):
• Umożliwia:
- Interfejs linii telefonicznej;
- Programowalny Modem (STEP7 Micro/WIN);
- Zabezpieczenie hasłem;
- Technologia Plug&Play.
• Wspiera:
- Protokół Modbus RTU;
- Stronicowanie numeryczne i tekstowe;
- Wiadomości SMS;
- Transfer danych typu CPU-to-CPU or CPU-to-Modbus.
• Proste programowanie z Micro/WIN Wizard.
Moduł PROFIBUS DP Slave (EM 277):
Łączy S7-200 jako slave w sieci PROFIBUS DP
• Umożliwia:
– Transfer 9.6 KBit/s do 12 Mbit/s (z autodetekcją);
– Protokół PPI-Advanced, MPI und PROFIBUS DP;
– Cztery wskaźniki statusu LED;
– Station Address ustawiany obrotowym przełącznikiem (0..99).
• Wspiera:
– Max. 99 urządzeń na magistrali (Adresowane 0 ... 99);
– Max. do 1200 m (93.75 KBit/s).

Moduł Master AS Interface (CP 243-2):
Umożliwia:
– 2 przyciski przełączające na module (Display & Operation Mode)
– diody LED do wyświetlania statusów: Slave Status, Errors and Bus Status
• Wspiera:
– Podłączenie 62 modułów Slave AS-Interface
– Długość cyklu 5 ms (31 slave) lub 10 ms (62 slave)
– Długość magistrali100 m
– Master Klasy M1e
• Dwa tryby pracy:
– Standard Operation (dostęp do Bloku danych I/O w Slave)
– Extended Operation (dodatkowo transfer parametrów i danych diagnostycznych)
• Simple Programming with the Wizard
Moduł Ethernet (CP 243-1):
• Wspiera
- Połączenie jako EM
- Przetwarzanie danych
- Prostą administrację sieci
- Łatwa wymiana modułu (plug & play)
• Umożliwia
- Łącze Ethernet przez RJ45
- Połączenie przez PC-Access
- Zdalne programowanie, konfiguracja i diagnostyka
- Równoczesna komunikacja z maks. 8 sterownikami S7
• Ułatwia elastyczną i rozproszoną strukturę systemu automatyki
• Proste programowanie (Wizard)
Sieć Ethernet z (CP 243-1):
- Komunikacja Industrial Ethernet
- Używa standardowych serwisów Read & Write
- Do 212 bajtów danych użytkownika w komendzie
- Wspiera do 8 kanałów komunikacyjnych
- Operacje Client / Server
- Proste programowanie z Wizard
Moduł komunikacji (CP 243-1 IT):
• Umożliwia:
- Te same możliwości sieciowe co CP 243-1
- Wysyła do 32 wiadomości E-Mail
- Transfer do 32 plików przez FTP
- Zintegrowany Web-Server
- Wbudowana diagnostyczna strona HTML użytkownika
- Wbudowana diagnostyczna strona HTML systemu
• Wspiera:
- Wizualizację (JAVA i HTML)
- Wymiana plików danych przez FTP
• Proste programowanie z Wizard
Moduły (HMI) (Human-Machine Interface):
• Dopasowany do S7-200.
- Optymalny stosunek cena/ możliwości;
- Proste wykorzystanie z TD 200-Wizard, TP Designer i WINCC flexible micro.
STEP7-Micro/WIN 32:
- Prosta instalacja i konfiguracja
- Prosta nauka obsługi i wykorzystanie
- Kompleksowe narzędzie do programowania
- Szybkie wykrywanie błędów i korekta
- Narzędzia do obsługi PLC
- Bogata dokumentacja
- Pomocne kreatory (Wizardy)
- Łatwe uruchomienie sterownika
• Możliwości:
- Programowanie graficzne w językach Ladder & FBD (drabinkowy i FBD) (IEC 1131-3)
- Język tekstowy STL
- Przełączanie pomiędzy standardami języka
- Łatwa identyfikacja błędów
- Proste zarządzanie projektem
Wizard, kreator:
Oprogramowanie, które stanowi rodzaj interfejsu użytkownika. Poprzez zadawanie kolejnych pytań ułatwia ono
wprowadzanie danych niezbędnych np. do konfiguracji jakiegoś programu, do wytworzenia cyfrowego
dokumentu lub zbioru takich dokumentów. W tym drugim przypadku kreator jest rodzajem elektronicznego
formularza.
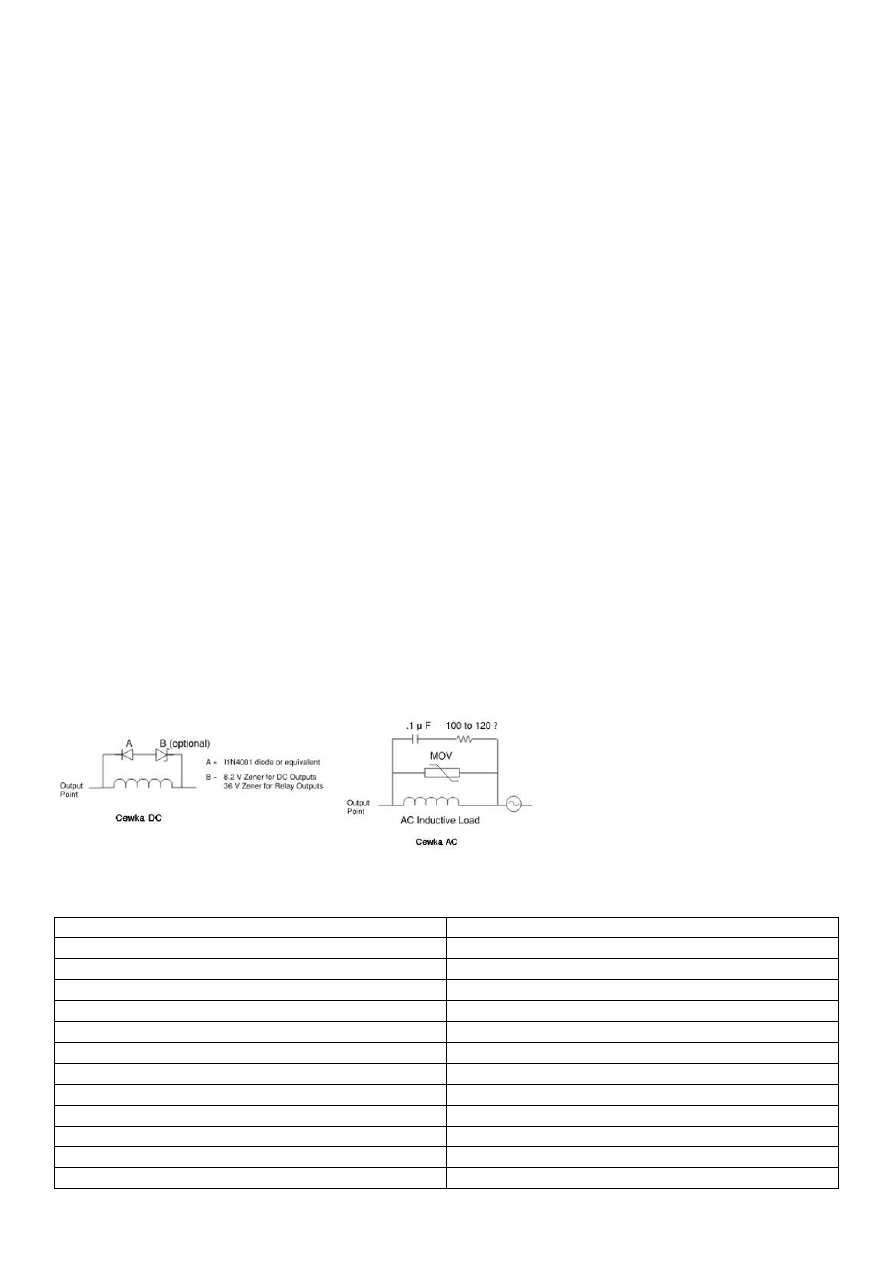
Zabezpieczenie obwodów wyjściowych:
• Obwody tłumienia przepięć:
Identyfikatory obszarów pamięci:
oznaczenie
nazwa
(I)
Zmienna wejściowa
(Q)
Zmienna wyjściowa
(M)
Wewnętrzna zmienna dyskretna
(SM)
Wew. Zmienna specjalna (zmienna systemowa)
(V)
Zmienne pamięciowe
(T)
timer
(C)
licznik
(AI)
Zmienna wejściowa analogowa
(AQ)
Zmienna wyjściowa analogowa
(AC)
akumulator
(HC)
Szybki licznik
(K)
stała
Typy zmiennych:
Identyfikatory zmiennych:
Nazwa
Typ zmiennej
1 bitowa
(bit)
8 bitowa
(B - Byte)
16 bitowa
(W-Word)
32 bitowa
(D – Double Word)
Zmienna
pamięciowa (V –
Variable Memory)
-
VB
VW
VD
Zmienna wejściowa
(I – Input)
I
IB
IW
ID
Zmienna wyjściowa
(Q – Output)
Q
QB
QW
QD
Wew. Zmienna (M –
Internat Memory)
M
MB
MW
MD
Wew. Zmienna
specjalna –
systemowa (SM –
Specjal Memory)
SM
SMB
SMW
SMD
Zmienna wejściowa
analogowa (AI –
Analog Input)
-
-
AIW
-
Zmienna wyjściowa
analogowa (AQ –
Analog Output)
-
-
AQW
-
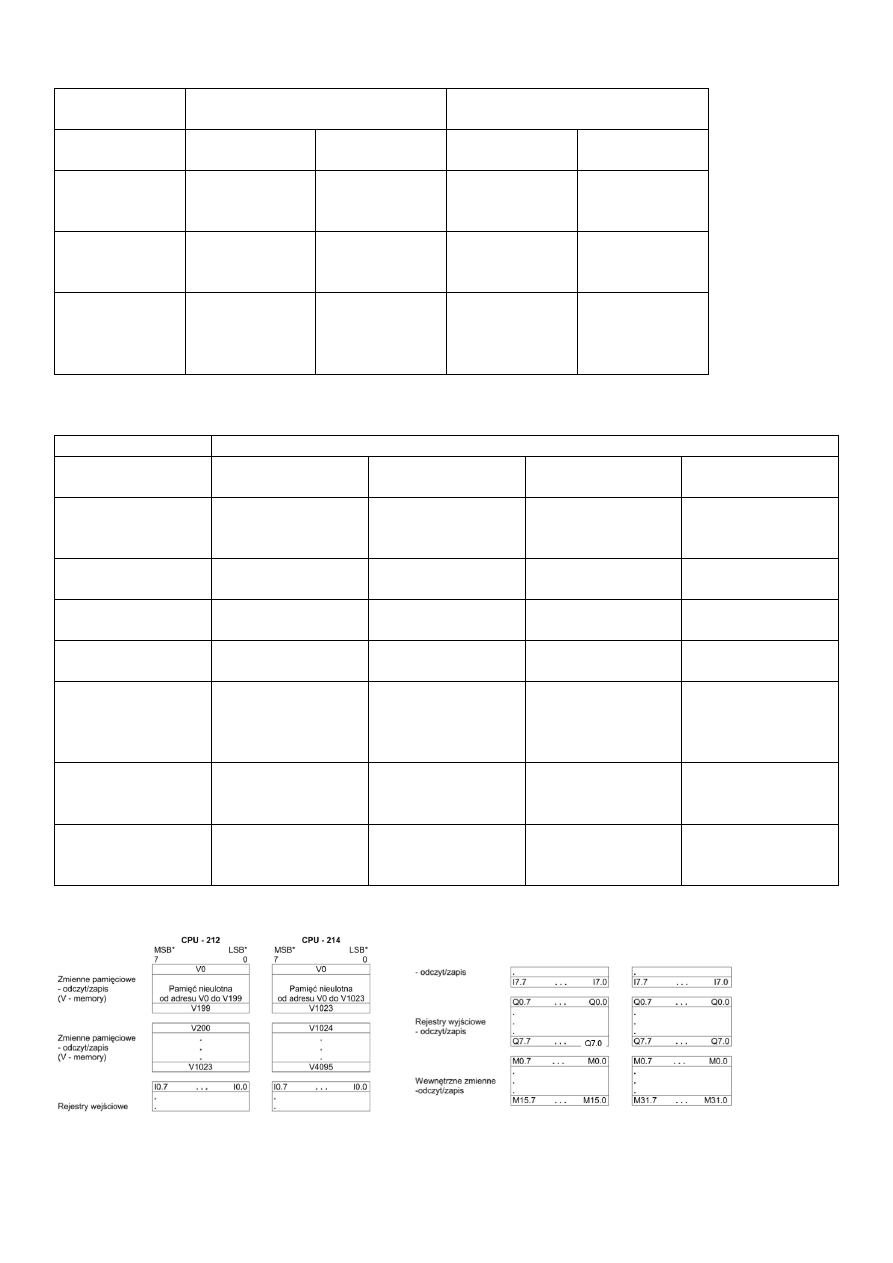
Przestrzeń adresowa CPU:
(CPU)
Zmienna
rejestrowa
Liczba całkowita bez znaku
Liczba całkowita ze znakiem
Zapis dziesiętny
Zapis
szesnastkowy
Zapis dziesiętny
Zapis
szesnastkowy
B (bajt – dana
zawierająca 8
bitów)
0 do 255
0 do FF
-128 do +128
80 do 7F
W (słowo – dana
zawierająca 16
kolejnych bitów)
0 do 65535
0 do FFFF
-32768 do
+32767
8000 do 7FFF
D (podwójne
słowo – dana
zawierająca
kolejne 32 bity)
0 do
4.292.967.295
0 do FFFF FFFF
-2.147.483.648
do
+ 2.147.483.647
8000 0000
do
7FFF FFFF
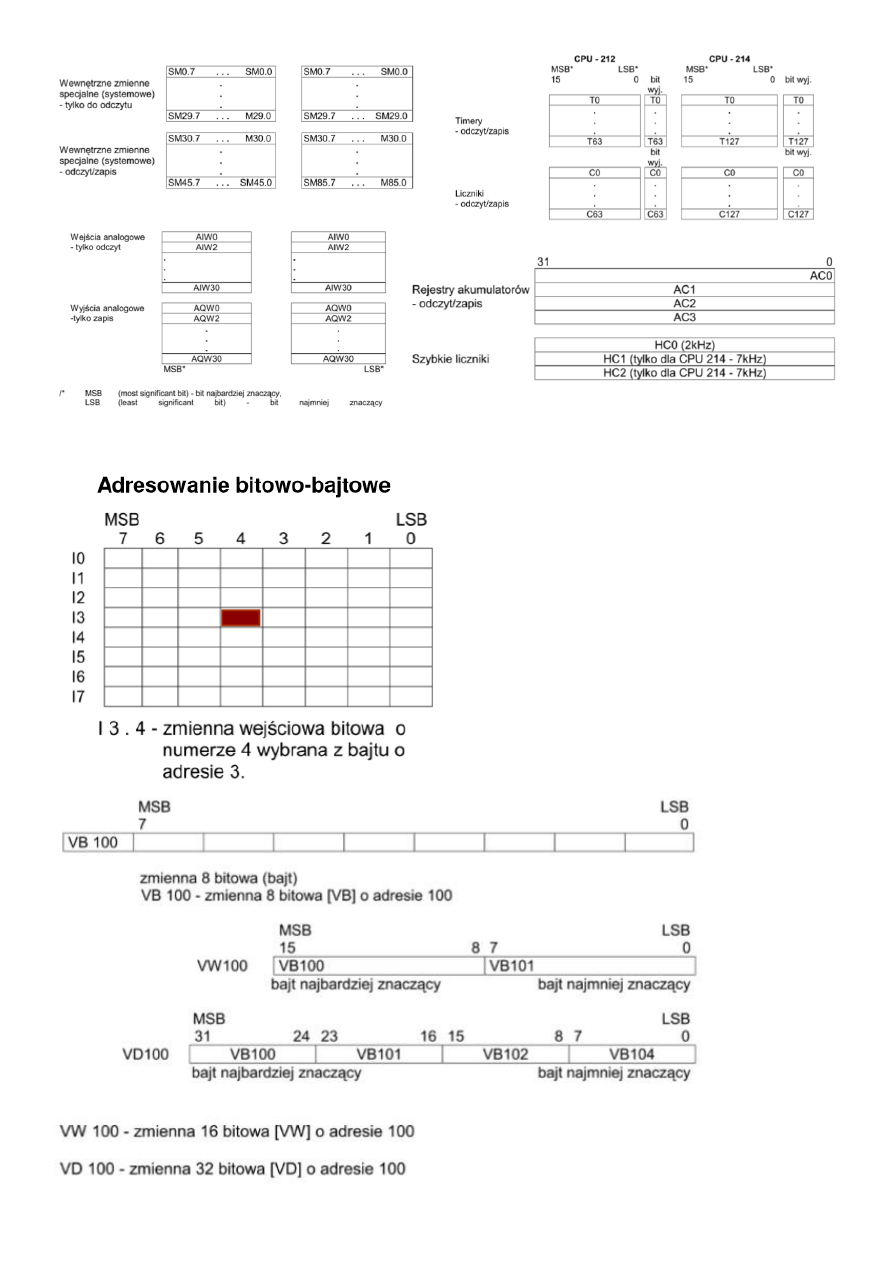
Adresowanie w S7-200:
(MSB) – bit najbardziej znaczący
(LSB) – bit najmniej znaczący
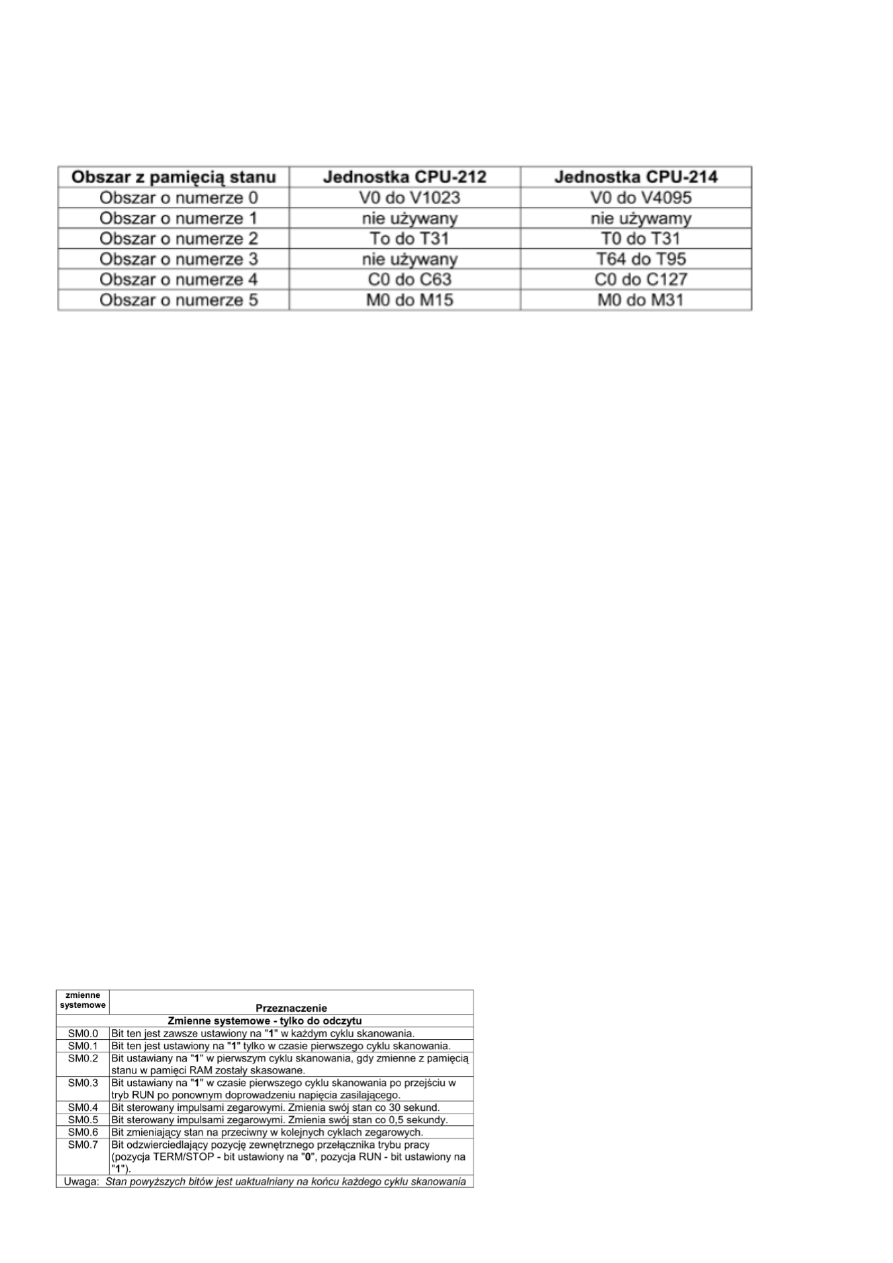
• Zmienne z pamięcią stanu (retentive):
- Zmienne zachowują swój stan nawet po wyłączeniu zasilania
- Po pewnym czasie (około 50 godzin dla CPU-212 i 190 godzin dla CPU-214) od momentu wyłączenia zawartość
pamięci RAM zostaje stracona.
- Informuje o tym bit specjalny SM0.2
Zmienne systemowe:
Jest to grupa zmiennych, które umożliwiają dostęp do danych systemowych takich jak:
• informacje o statusie, błędach działania oraz uszkodzeniach wewnętrznych sterownika (awaria CPU, uszkodzenie
pamięci RAM, ROM, słabe baterie, błędne hasło dostępu itp.),
• błędach działania układów wejścia/wyjścia sterownika,
• błędach programowych,
• błędach związanych z transferem danych między sterownikiem a programatorem,
• błędach związanych z konfiguracją systemu, informacje dotyczące aktualnego czasu i daty, itp.
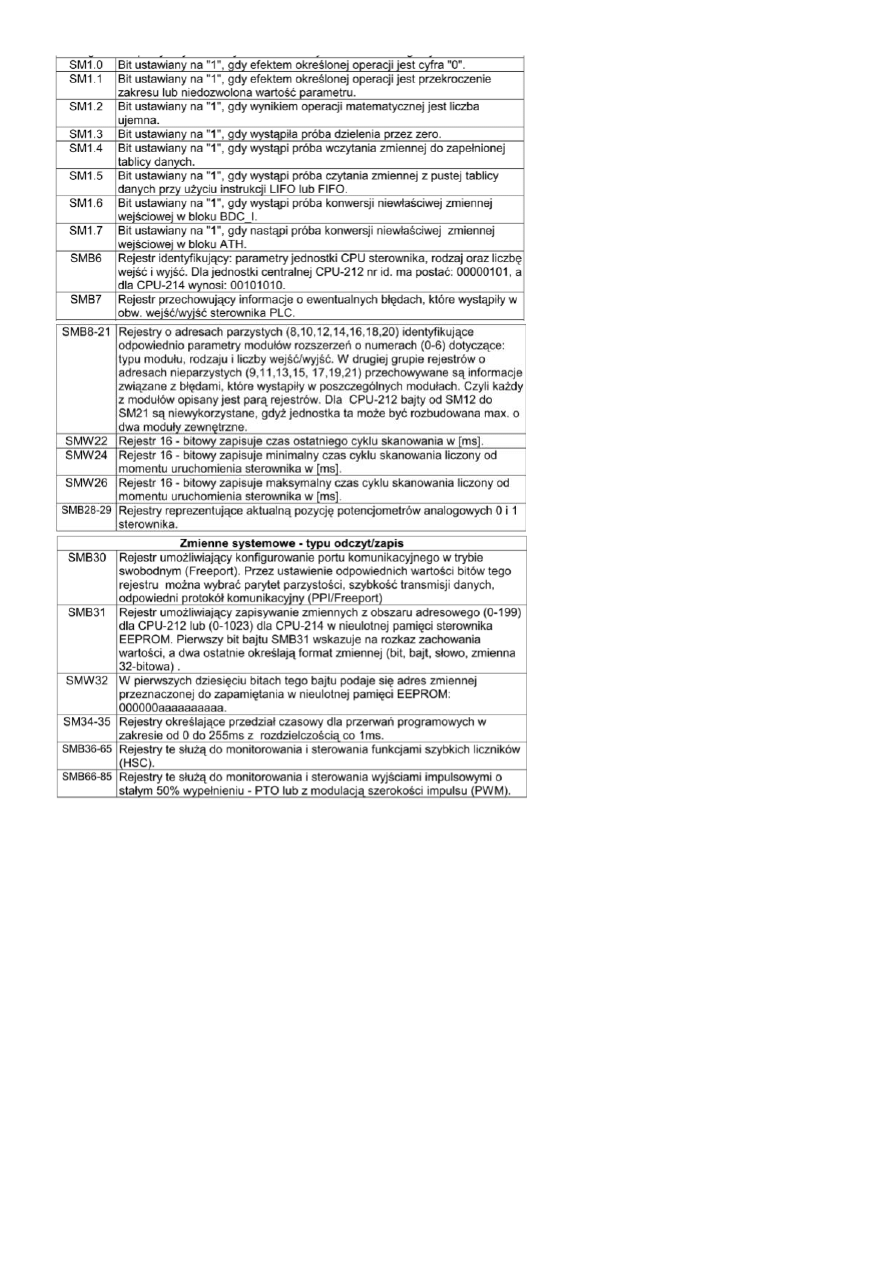
Bity specjalne (ang. special memory bits) mogą być wykorzystane jako zmienne:
• bitowe,
• bajtowe,
• słowa lub podwójne słowa.
Bajty specjalne od SM0 do SM29 umożliwiają tylko odczyt informacji. Ich zawartość jest uaktualniana przez
sterownik programowalny i dostarczają one informacji o statusie sterownika.
Bajty specjalne od SM30 do SM85 są typu zapis/odczyt umożliwiają wybór i sterowanie różnorodnymi funkcjami.
Potencjometry analogowe:
Szczególnym typem zmiennych systemowych są rejestry, których aktualna wartość zmieniana jest przy pomocy
potencjometrów analogowych umieszczonych w sterowniku pod górną przykrywką uchylną.
Potencjometrom przypisane są rejestry specjalne 8 bitowe:
• SMB28 dla sterownika z CPU 212,
• SMB28 i SMB29 dla CPU 214.
Wartość tych rejestrów zmienia się w zakresie od 0 do 255.
Pozwalają one na ręczne strojenie zmiennych analogowych i mogą być użyte w programie np. do zmiany nastaw,
granic itp..
Bity statusowe:
Zastosowanie SIMATIC S7-200:
- Przemysł drzewny
- Systemy transportowe
- Sterowanie pompami
- Napełnianie
- Systemy ssące (próżniowe)/windy
Precyzyjne sterowanie zatrzymaniem windy:
• Niskie koszty:
- Łatwe dostosowanie do wymagań klienta
- Zdalny monitoring
• Poprawa jakości sterowania:
- Cyfrowy monitoring położenia wału (enkodery)
(dokładne określenie położenia windy)

Odsysacze w obróbce drewna:
• Niskie koszty:
- Zmniejszenie kosztów okablowania dzięki AS-Interface
- Sterowanie zaworami odcinającymi w układzie ssącym
- Efektywna obsługa np. przy użyciu modemu
• Większa jakość
- Optymalne dopasowanie mocy ssania
- Zmniejszenie całkowitego poboru mocy
Maszyny do obróbki drewna:
•Niskie koszty
- Elastyczny system z łatwą rozbudową
- Łatwe dostosowanie do wymagań klienta
• Wyższa jakość
- Precyzyjne pozycjonowanie
Wsparcie i serwis:
• Wsparcie:
– Serwis globalny
– Szybka dostawa części
– Wsparcie techniczne 24/7
– Sparcie programistyczne
– szkolenia
• Pomoc w programowaniu:
– Broszury informacyjne i manuale
– Aktualizacja oprogramowania i dokumentacji
– Porady Tips & Tricks i przykładowe projekty
– Wersje demo oprogramowania
– Treningi Online (Step 2000)
Zastąpienie S7-200:
Sterowniki S7-200 zostają zastępowane sterownikami S7-1200 a Step7 micro Win zmienia się w TiaPortal Step7
Basic.
Algebra Boole’a – uproszczenia:
Prawa de’Morgana:
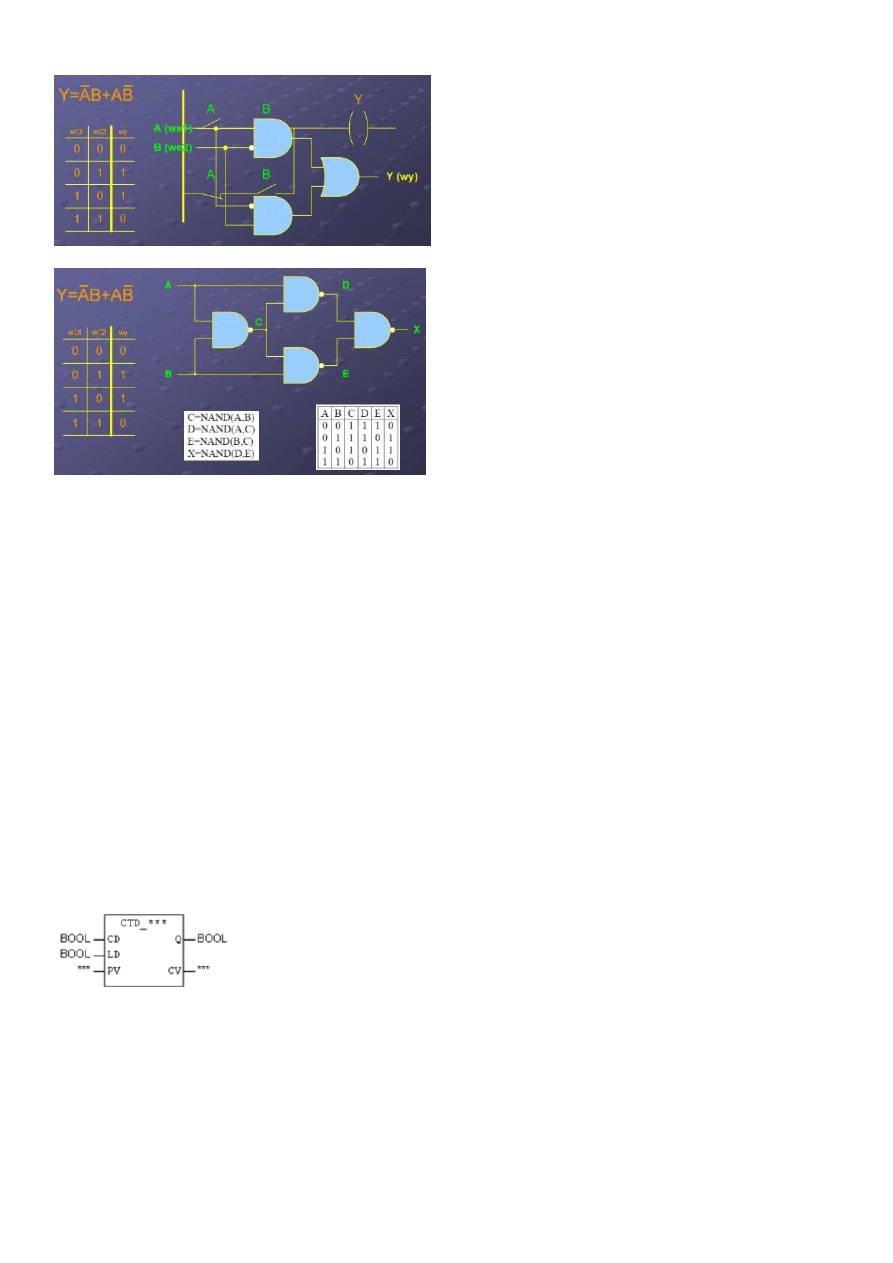
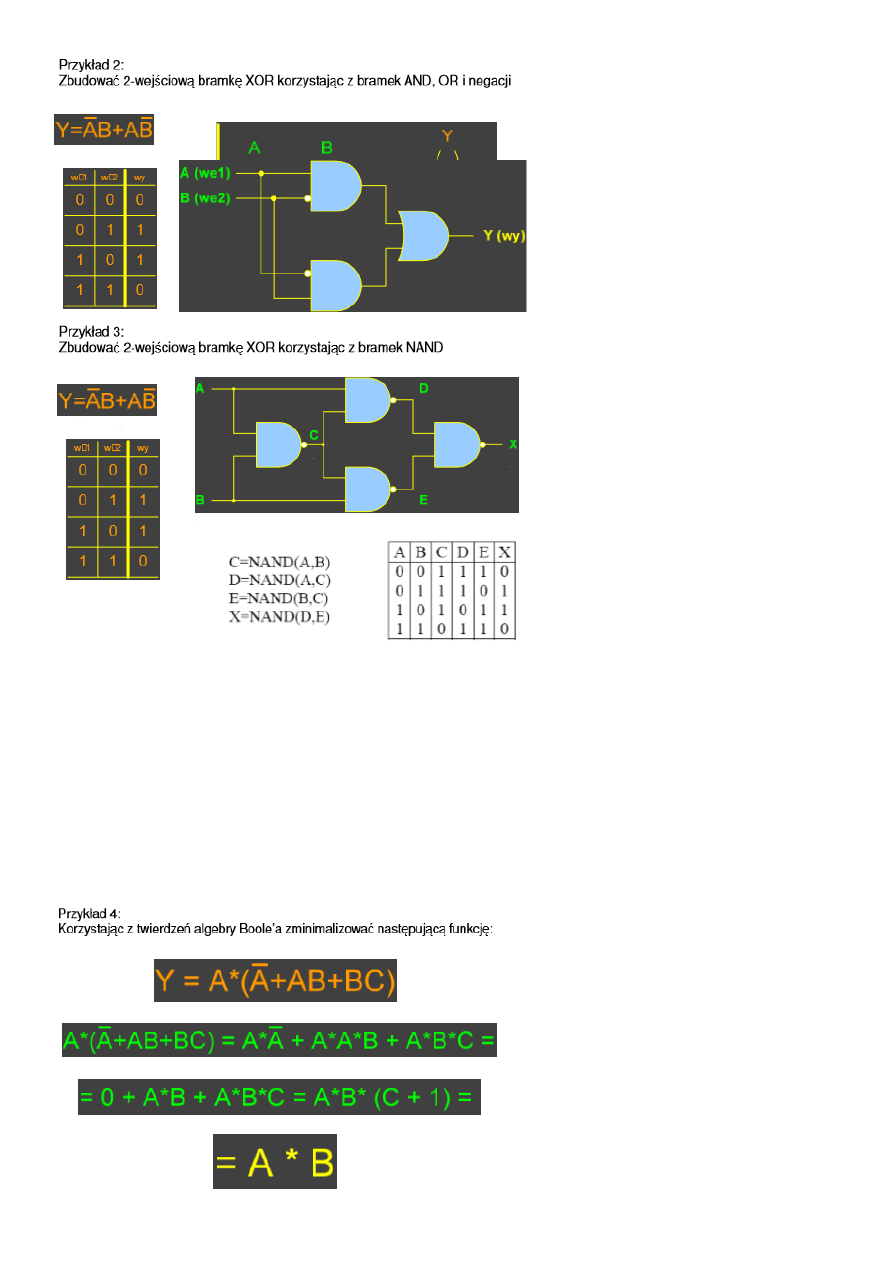
Funkcja XOR z bramek AND i OR i NOT:
Funkcja XOR z bramek NAND:
TIMERY:
Timery są to bloki funkcyjne przeznaczone do realizacji zależności czasowych w układach sterowania. W pakiecie
ConCept Lite, w bibliotece IEC zawarte są trzy podstawowe typy timerów:
• TON
• TOF
• TP
Timer TON realizuje funkcję załączenia wyjścia po określonym czasie.
(TON)
Timer TOF realizuje funkcję wyłączenia wyjścia po określonym czasie.
(TOF)
Timer TP wystawia na wyjściu impuls o określonym czasie trwania.
(TP)
Liczniki, Countery:
Liczniki są to bloki funkcyjne przeznaczone do zliczania różnych zdarzeń w programie, wykorzystywane głównie w
układach sekwencyjnych. W pakiecie ConCept Lite, w bibliotece IEC zawarte są trzy podstawowe typy liczników:
• CTU – zliczający w górę
• CTD – zliczający w dół
• CTUD – rewersyjny (zliczający i w górę i w dół)
Licznik CTD:
CD – pojawienie się impulsu dodatniego na tym wejściu powoduje zmniejszenie o 1 zawartości licznika (CV := CV -1)
LD – impuls dodatni na tym wejściu powoduje wpisanie wartości maksymalnej do licznika (CV := PV)
PV – wartość maksymalna licznika (typ INT lub DINT)
Q – wyjście logiczne przyjmuje stan 1, wtedy gdy zawartość licznika CV<=0
CV – zawartość licznika (typ INT lub DINT)
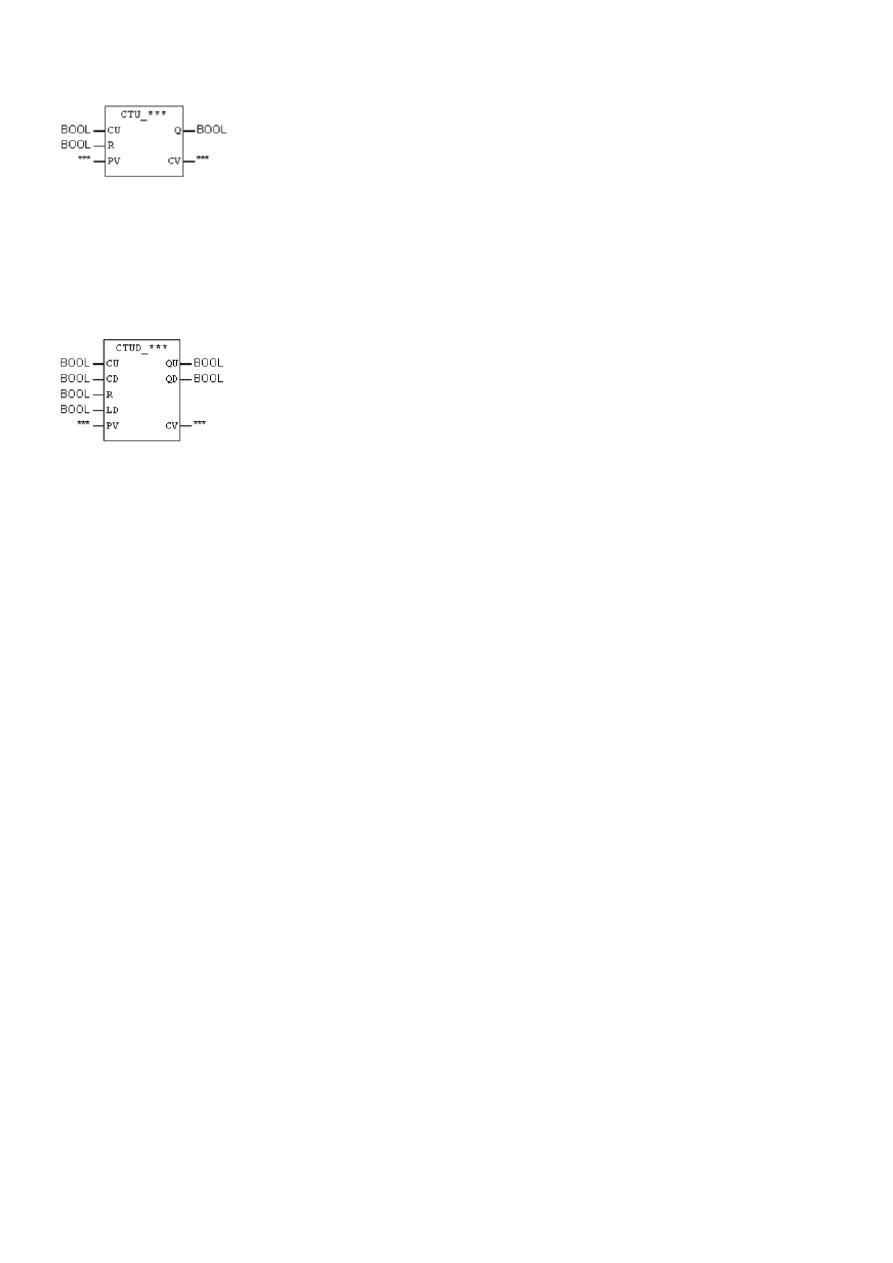
Licznik CTU:
CU – pojawienie się impulsu dodatniego na tym wejściu powoduje zwiększenie o 1 zawartości licznika (CV := CV +1)
R – impuls dodatni na tym wejściu powoduje wyzerowanie licznika (CV := 0)
PV – górna wartość licznika (typ INT lub DINT)
Q – wyjście logiczne przyjmuje stan 1, wtedy gdy zawartość licznika CV >= PV
CV – zawartość licznika (typ INT lub DINT)
Licznik CTUD:
CU – wejście zliczające w górę (CV := CV +1)
CD – wejście zliczające w dół (CV := CV -1)
R – wyzerowanie licznika (CV := 0)
LD – wpisanie wartości licznika (CV := PV)
PV – górna wartość licznika (INT lub DINT)
QU – wyjście przyjmuje stan 1, wtedy gdy zawartość licznika CV >= PV
QD – wyjście przyjmuje stan 1, wtedy gdy zawartość licznika CV <= 0
CV – bieżąca wartość licznika (INT lub DINT)
Concept – Zegar systemowy:
Zegar systemowy jest to blok funkcyjny, który wprowadza do aplikacji użytkownika sygnał prostokątny o wybranej
częstotliwości. Może on być wykorzystany jako sygnał taktujący w układach sekwencyjnych. W pakiecie ConCept Lite,
w bibliotece SYSTEM znajduje się blok SYSCLOCK, który dostarcza sygnałów taktujących o następujących
częstotliwościach:
• CLK1 – 0,3125 Hz
• CLK2 – 0,6250 Hz
• CLK3 – 1,2500 Hz
• CLK4 – 2,5000 Hz
• CLK5 – 5,0000 Hz
System czasu rzeczywistego:
• Systemem czasu rzeczywistego określa się taki system, którego wynik przetwarzania zależy nie tylko od jego
logicznej poprawności, ale również od czasu, w jakim jest osiągnięty.
• System czasu rzeczywistego odpowiada w sposób przewidywalny (w określonym czasie) na bodźce zewnętrzne
napływające w sposób nieprzewidywalny.
• System czasu rzeczywistego jest systemem interaktywnym, który utrzymuje ciągły związek z asynchronicznym
środowiskiem.
• Cechy systemu czasu rzeczywistego:
- Współbieżność
- Uwarunkowania czasowe
- Wymaganie współbieżności wynika z konieczności ogólnej gotowości do obsługi wielu jednocześnie pojawiających
się, w dowolnych momentach czasowych, zdarzeń.
- Uwarunkowania czasowe precyzują, w jakim czasie (momencie lub przedziale czasowym) poszczególne odpowiedzi
systemu powinny być przesyłane do otoczenia, którym może być sterowany proces, urządzenie wykonawcze, klienci
bankomatu itp…
Wymagania czasowe formułowane w różny sposób, również względem stopnia ich wykonywalności, pozwalają na
wprowadzenie podstawowej klasyfikacji systemów czasu rzeczywistego. Systemy takie dzielimy na systemy o
wymaganiach czasowych:
- twardych (ang. hard real-time),
- miękkich (ang. soft real-time),
- mieszanych (ang. firm real-time).
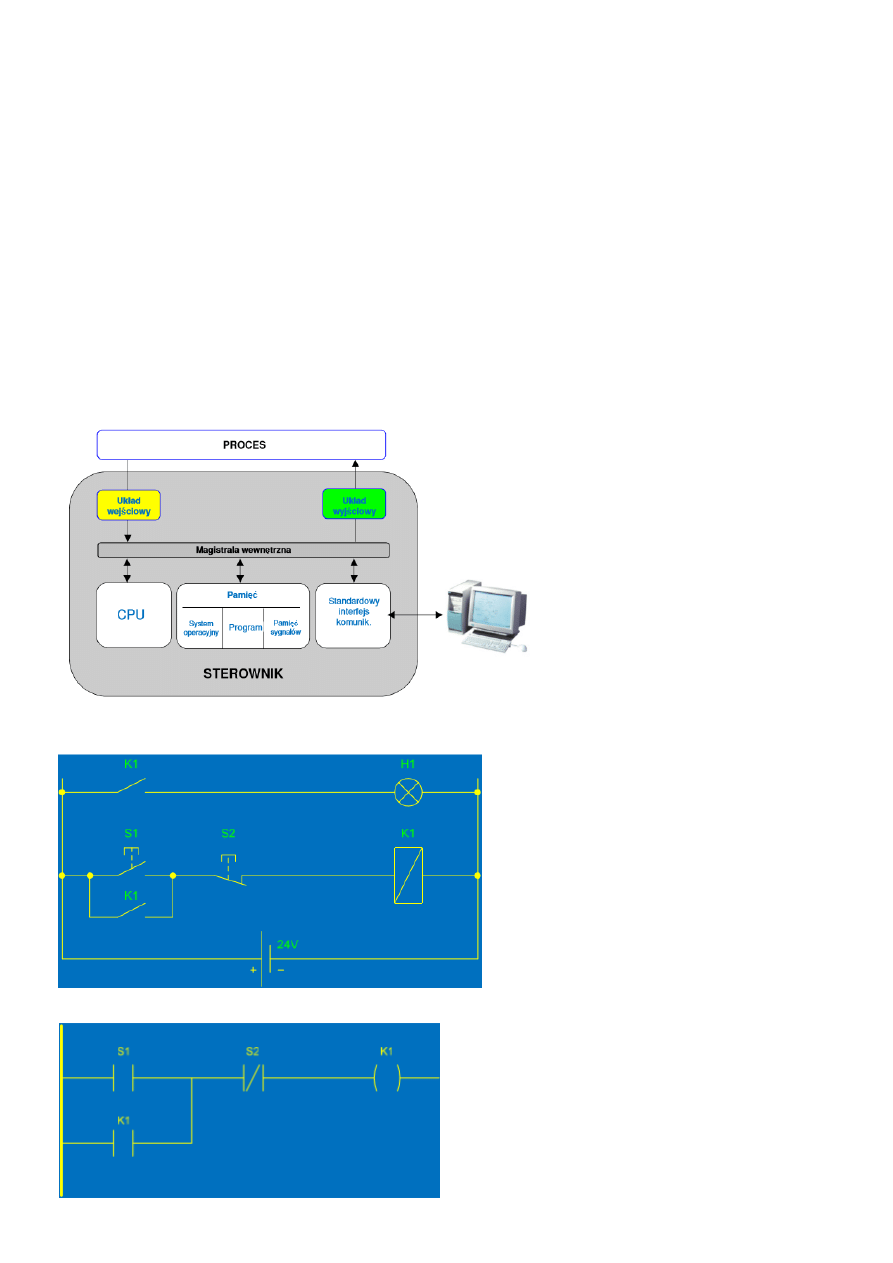
Struktura sterownika:
Sterowanie żarówki (schemat stykowy):
Sterowanie żarówki: Schemat w języku LD
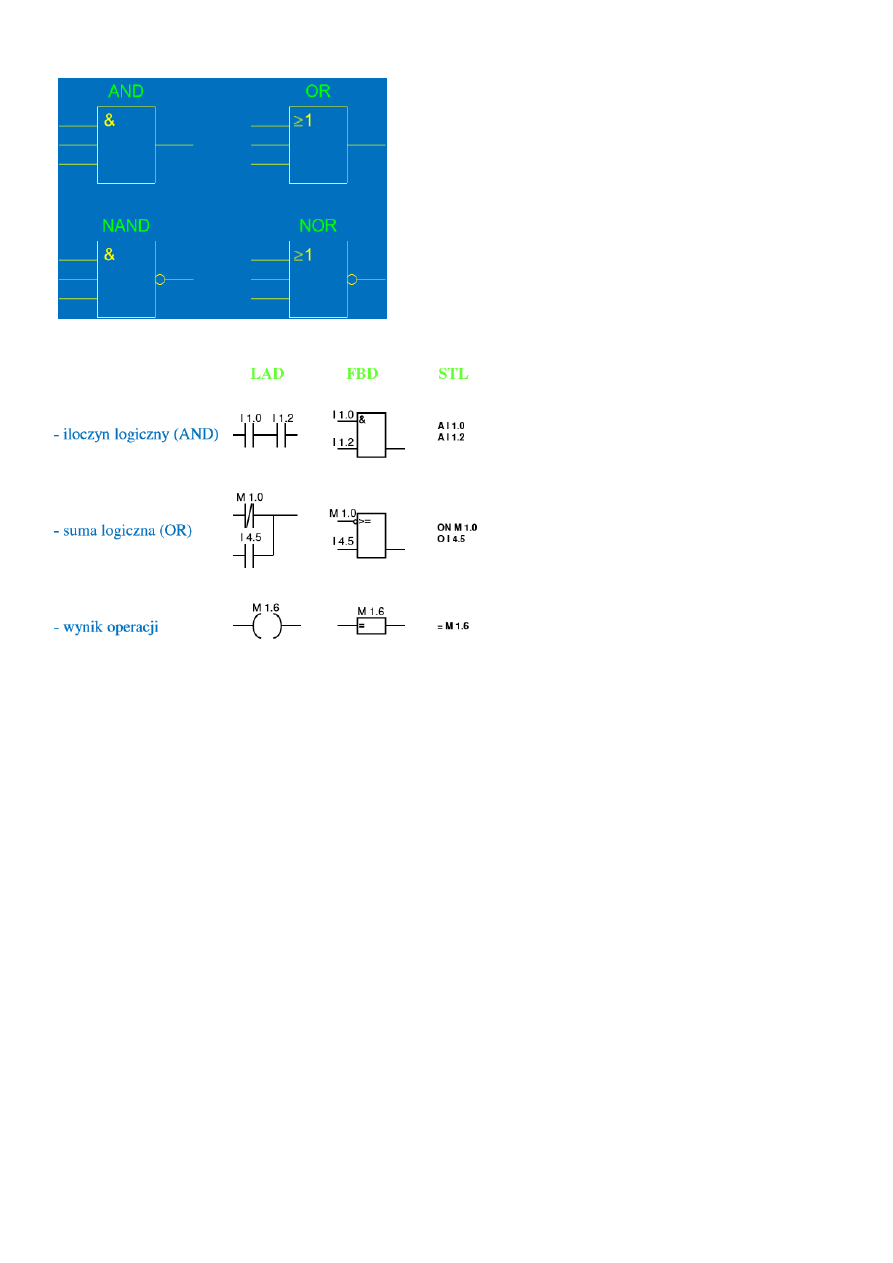
Język bloków funkcyjnych FBD (Functional Block Diagram):
(FBD)
Struktura języków programowania: (LAD) (FBD) (STL) (AND) (OR)
Standardy analogowe:
-
Dwuprzewodowa pętla prądowa 4 – 20 mA
- ASI
- CAN
Protokoły komunikacyjne:
• poziom czujników
- AS-Interface
- Seriplex
• poziom sterowania
- CANOpen
- DeviceNet
- Device WorldFIP
- InterBus S
- Profibus DP/PA
- SDS
- Modbus
• poziom zarządzania
- ControlNet
- FF
- P-Net
- ProfiNet Profibus FMS
- WorldFIP
Wyszukiwarka
Podobne podstrony:
Automatyzacja PDF
LMG-Automatyka napedu kwiecien 2005 cz2 pdf
automaty II kolos pdf
Automatyka do oddania2 pdf
LMG Automatyka napedu kwiecien 2005 cz2 pdf
FESTO Podstawy automatyzacji
Automatyka (wyk 3i4) Przel zawory reg
Automatyzacja w KiC (w 2) Obiekty reg
AutomatykaII 18
Automatyka wykład 8
Wybrane elementy automatyki instalacyjnej
12 Podstawy automatyki Układy sterowania logicznego
instr 2011 pdf, Roztw Spektrofoto
Automatyka dynamiakPAOo 2
(ebook PDF)Shannon A Mathematical Theory Of Communication RXK2WIS2ZEJTDZ75G7VI3OC6ZO2P57GO3E27QNQ
Automatyka okrętowa – praca kontrolna 2
KSIĄŻKA OBIEKTU pdf
więcej podobnych podstron