
1
Praca domowa
Metody numeryczne
Kamil Żyłko
Wydział Inżynierii Produkcji
Automatyka i robotyka
Studia magisterskie stacjonarne
Warszawa 2013
2
1.
Treść zadania Z90.
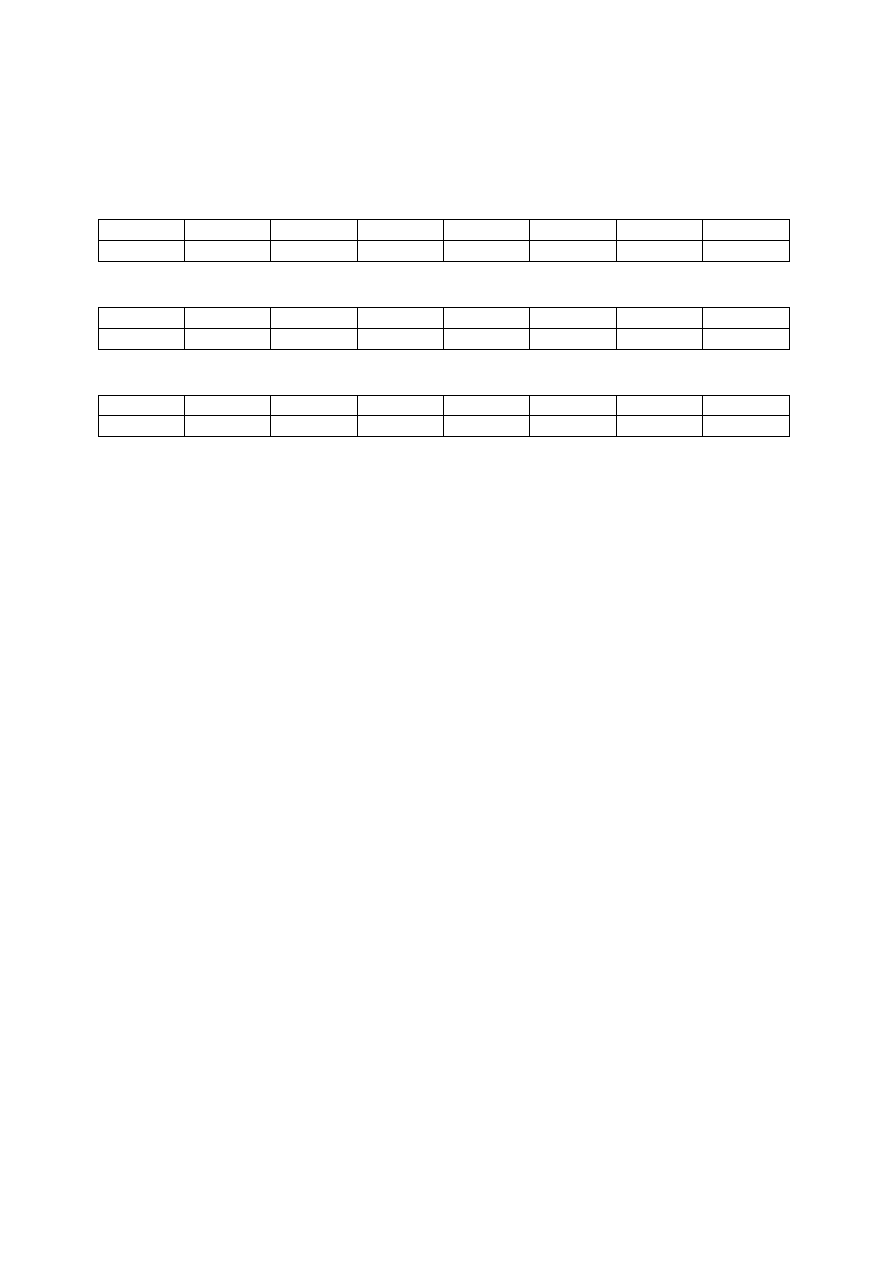
Dana jest funkcja zadana poniższą tablicą:
gdzie x
i
jest argumentem funkcji a f(x
i
) jej wartością, i=1,…, 21. Wyznacz:
a)
wielomiany interpolacyjne Newtona i Lagrange’a szóstego stopnia w przedziale [-1.5 , 1.5],
b)
wielomian interpolacyjny składający się z funkcji sklejanych trzeciego i/lub czwartego stopnia
na przedziale [-5, 5].
Przedstaw graficznie na jednym wykresie wielomiany z punktów a) i b). Porównaj błąd interpolacji w
przedziale [-1,5, 1,5].
2.
Opis metod numerycznych wykorzystanych do rozwiązania zadania.
Interpolacja stosowana jest w celu określenia wartości funkcji między znanymi punktami jej
przebiegu. Stosuje się przybliżanie funkcji za pomocą wielomianu odpowiednio wysokiego stopnia.
Można to wyznaczyć dzięki znanym wartościom funkcji w danych punktach. Tych znanych punktów
jest n+1, natomiast wyznaczany wielomian może być stopnia co najwyżej n.
a)
Metoda Newtona
Wielomian interpolacyjny metodą Newtona można zapisać jako:
ݓሺݔሻ = ܽ
ୀ
ෑሺݔ − ݔ
ିଵ
ୀ
ሻ
= ܽ
+ ܽ
ଵ
ሺݔ − ݔ
ሻ + ܽ
ଶ
ሺݔ − ݔ
ଵ
ሻሺݔ − ݔ
ሻ + ⋯ + ܽ
ሺݔ − ݔ
ିଵ
ሻ … ሺݔ − ݔ
ଵ
ሻሺݔ − ݔ
ሻ
Do wyznaczenia wielomianu można wykorzystać metodę interpolacji Newtona. W związku z tym,
że należy wyznaczyć wielomian w przedziale [-1.5 , 1.5], a punkty x
i
są w równych odległościach,
należy zastosować wzory interpolacyjne Newtona dla równoodległych wartości argumentu.
x
i
-5
-4,5
-4
-3,5
-3
-2,5
-2
f(x
i
)
1,536098
2,318505
3,663004
6,12323
10,98901
21,59244
47,61905
x
i
-1,5
-1
-0,5
0
0,5
1
1,5
f(x
i
)
120,3008
333,3333
761,9048
1000
761,9048
333,3333
120,3008
x
i
2
2,5
3
3,5
4
4,5
5
f(x
i
)
47,61905
21,59244
10,98901
6,12323
3,663004
2,318505
1,536098

3
W pierwszej kolejności mając dane wartości funkcji dla argumentów będących w równych
odległościach wyznacza się różnice między wartościami funkcji dla argumentów sąsiadujących ze
sobą. Można zapisać to jako:
∆ݕ
= ݕ
ଵ
− ݕ
∆ݕ
ଵ
= ݕ
ଶ
− ݕ
ଵ
…………………………..
∆ݕ
ିଵ
= ݕ
− ݕ
ିଵ
Następnie wylicza się różnice między wyznaczonymi przed chwilą różnicami:
∆
ଶ
ݕ
= ∆ݕ
ଵ
− ∆ݕ
∆
ଶ
ݕ
ଵ
= ∆ݕ
ଶ
− ∆ݕ
ଵ
………………….
∆
ଶ
ݕ
ିଶ
= ∆ݕ
ିଵ
− ∆ݕ
ିଶ
Powyższą czynność powtarza się aż do momentu, w którym zostaną wyliczone wszystkie różnice
różnic i nie będzie możliwości wyznaczenia kolejnej. Ostatnia wyznaczona różnica zapisana jest jako:
∆
ݕ
= ∆
ିଵ
ݕ
− ∆
ିଵ
ݕ
ିିଵ
Po wyliczeniu różnic należy przejść do wyznaczania wielomianu opisanego wzorem:
ܹ݊ሺݔሻ = ݕ
+ ݍ ∗ ∆ݕ
+
ݍሺݍ − 1ሻ ∗ ∆
ଶ
ݕ
2!
+ ⋯ +
ݍሺݍ − 1ሻ … ൫ݍ − ሺ݊ − 1ሻ൯ ∗ ∆
ݕ
݊!
ݍ =
ݔ
ݔ
ଵ
− ݔ
b)
Metoda Lagrange’a
Wielomian interpolacyjny metodą Lagrange’a można zapisać jako:
ݓ
ሺݔሻ = ݂ሺݔ
ୀ
ሻ݈
ሺݔሻ
= ݂ሺݔ
ୀ
ሻ ∗
ሺݔ − ݔ
ሻሺݔ − ݔ
ଵ
ሻ … ൫ݔ − ݔ
ିଵ
൯൫ݔ − ݔ
ାଵ
൯ … ሺݔ − ݔ
ሻ
൫ݔ
− ݔ
൯൫ݔ
− ݔ
ଵ
൯ … ൫ݔ
− ݔ
ିଵ
൯൫ݔ
− ݔ
ାଵ
൯ … ൫ݔ
− ݔ
൯
c)
Interpolacja za pomocą funkcji sklejanych
Niech f(x)
∈ C <a;b>. s(x) ∈ S
3
(
∆
n
) jest funkcją sklejaną stopnia trzeciego dla funkcji f(x) jeżeli
s(x
i
)=f(x
i
)=y
i.
Interpolacja funkcjami sklejanymi polega na podziale przedziału <a;b> na tyle kolejnych
przedziałów, aby każdy z nich zawierał najwyżej kilka argumentów. Punkty wspólne
4
utworzonych przedziałów nazywane są węzłami interpolacji. W tym samym węźle, czyli
stanowiącym początek jednego przedziału i koniec drugiego przedziału funkcja musi
przyjmować takie same wartości.
W każdym z tych przedziałów interpoluje się funkcję wielomianem interpolacyjnym.
3.
Obliczenia numeryczne metodami:
a)
Newtona
W związku z tym, że argumenty funkcji są równoodległe oraz dlatego, że wartości
przyjmowane przez funkcję są takie same dla argumentów ze znakiem + i ze znakiem –
należy wyznaczyć wielomian metodą Newtona dla równoodległych wartości argumentu
jedynie dla argumentów od 0 do +1,5.
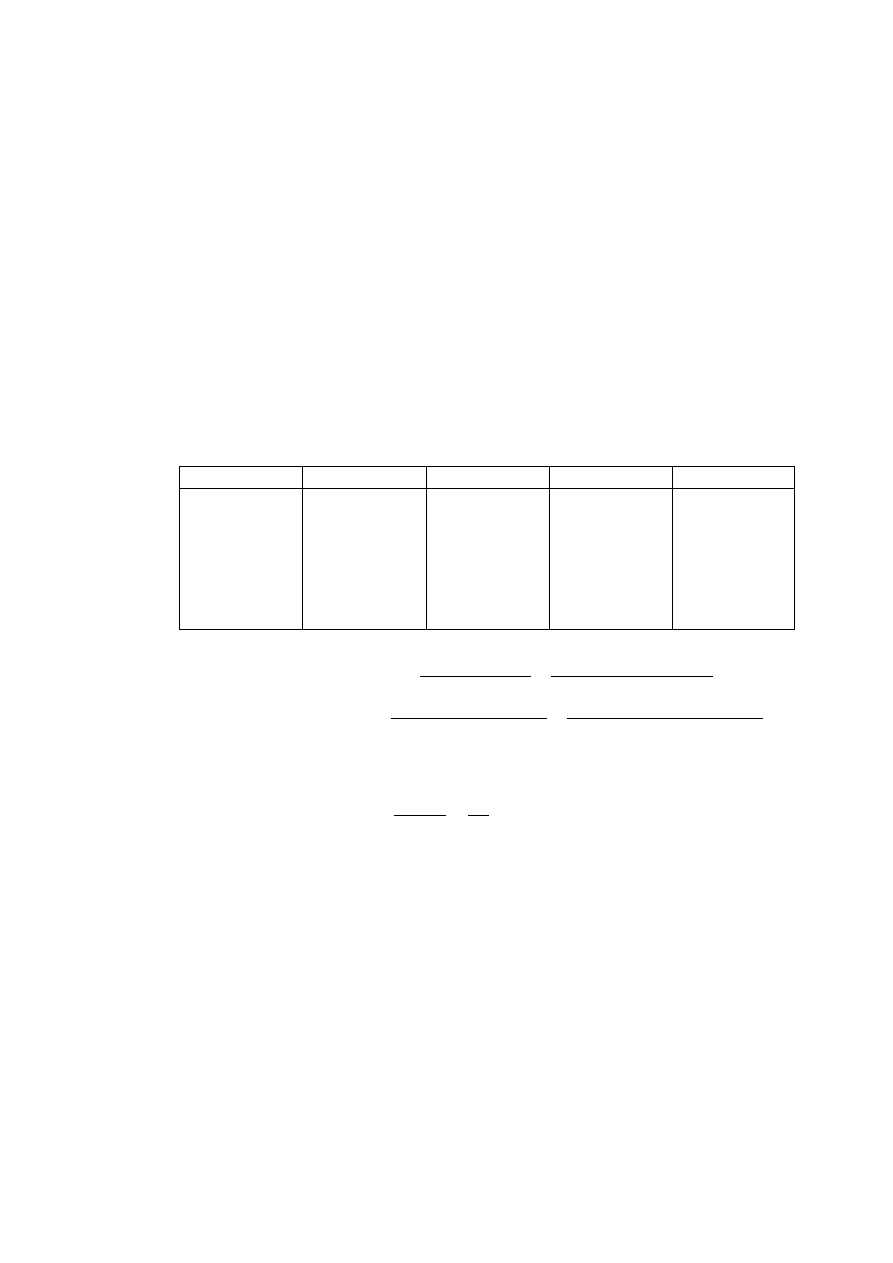
W tym przedziale podane są 4 argumenty, więc wyznaczony wielomian będzie miał
postać trzeciego stopnia.
x
y
∆y
∆
ଶ
y
∆
ଷ
y
0
1000
-238.0952
0.5
761.9048
-190.4763
-428.5715
406.0153
1
333.3333
215.539
-213.0325
1.5
120.3008
ܹ݊ሺݔሻ = ݕ
+ ݍ ∗ ∆ݕ
+
ݍሺݍ − 1ሻ ∗ ∆
ଶ
ݕ
2!
+
ݍሺݍ − 1ሻሺݍ − 2ሻ ∗ ∆
ଷ
ݕ
3!
=
= 1000 + ݍ ∗ −238.0952 +
ݍሺݍ − 1ሻ ∗ −190.4763
2!
+
ݍሺݍ − 1ሻሺݍ − 2ሻ ∗ 406.0153
3!
=
= 1000 + ݍ ∗ −238.0952 + ݍሺݍ − 1ሻ ∗ −95.23815 + ݍሺݍ − 1ሻሺݍ − 2ሻ ∗ 67.66921667
ݍ =
ݔ
ݔ
ଵ
− ݔ
=
ݔ
0.5 = 2ݔ
Po podstawieniu do wzoru
ܹ݊ሺݔሻ wartości 2x zamiast q otrzymujemy:
ܹሺݔሻ
= 2ݔሺ2ݔ − 1ሻሺ2ݔ − 2ሻ67.66921667 + 2ݔሺ2ݔ − 1ሻሺ−95.23815ሻ
+ 2ݔሺ−238.0952ሻ + 1000 =
= ሺ4ݔ
ଶ
− 2ݔሻሺ2ݔ − 2ሻ67.66921667 + ሺ4ݔ
ଶ
− 2ݔሻሺ−95.23815ሻ − 476.1904ݔ + 1000 =
= ሺ8ݔ
ଷ
− 8ݔ
ଶ
− 4ݔ
ଶ
+ 4ݔሻ67.66921667 − 380.9526ݔ
ଶ
+ 190.4763ݔ − 476.1904ݔ + 1000 =
= 541.3537334ݔ
ଷ
− 541.3537334ݔ
ଶ
− 270.6768667ݔ
ଶ
+ 270.6768667ݔ − 380.9526ݔ
ଶ
− 285.7141ݔ + 1000 =
= 541.3537334ݔ
ଷ
− 1192.9832ݔ
ଶ
− 15.0372333ݔ + 1000
5
Ze względu na to, że wartości przyjmowane przez funkcję są takie same dla argumentów ze
znakiem + i ze znakiem -, postać wielomianu wyznaczonego metodą Newtona jest następująca:
W(x)=
|541.3537334ݔ
ଷ
| − |1192.9832ݔ
ଶ
| − |15.0372333ݔ| + 1000
b)
Lagrange’a
x
0
0.5
1
1.5
y
1000
761.9048
333.3333
120.3008
ݓ
ሺݔሻ = ݂ሺݔ
ୀ
ሻ݈
ሺݔሻ
= ݂ሺݔ
ୀ
ሻ ∗
ሺݔ − ݔ
ሻሺݔ − ݔ
ଵ
ሻ … ൫ݔ − ݔ
ିଵ
൯൫ݔ − ݔ
ାଵ
൯ … ሺݔ − ݔ
ሻ
൫ݔ
− ݔ
൯൫ݔ
− ݔ
ଵ
൯ … ൫ݔ
− ݔ
ିଵ
൯൫ݔ
− ݔ
ାଵ
൯ … ൫ݔ
− ݔ
൯
=
= 1000 ∗
ሺݔ − 0.5ሻሺݔ − 1ሻሺݔ − 1.5ሻ
ሺ0 − 0.5ሻሺ0 − 1ሻሺ0 − 1.5ሻ +
+761.9048 ∗
ሺݔ − 0ሻሺݔ − 1ሻሺݔ − 1.5ሻ
ሺ0.5 − 0ሻሺ0.5 − 1ሻሺ0.5 − 1.5ሻ +
+333.3333 ∗
ሺݔ − 0ሻሺݔ − 0.5ሻሺݔ − 1.5ሻ
ሺ1 − 0ሻሺ1 − 0.5ሻሺ1 − 1.5ሻ +
+120.3008 ∗
ሺݔ − 0ሻሺݔ − 0.5ሻሺݔ − 1ሻ
ሺ1.5 − 0ሻሺ1.5 − 0.5ሻሺ1.5 − 1ሻ =
= ሺ1000ݔ − 500ሻ ∗
ሺݔ − 1ሻሺݔ − 1.5ሻ
0.5ሺ−1.5ሻ
+
+761.9048ݔ ∗
ሺݔ − 1ሻሺݔ − 1.5ሻ
−0.5ሺ−0.5ሻ +
+333.3333ݔ ∗
ሺݔ − 0.5ሻሺݔ − 1.5ሻ
0.5ሺ−0.5ሻ
+
+120.3008ݔ ∗
ሺݔ − 0.5ሻሺݔ − 1ሻ
1.5ሺ0.5ሻ
=
= ሺ1000ݔ
ଶ
− 1500ݔ + 500ሻ ∗
ሺݔ − 1.5ሻ
−0.75 +
+ሺ761.9048ݔ
ଶ
− 761.9048ݔሻ ∗
ሺݔ − 1.5ሻ
0.25 +
+ሺ333.3333ݔ
ଶ
− 166.66665ݔሻ ∗
ሺݔ − 1.5ሻ
−0.25 +
+ሺ120.3008ݔ
ଶ
− 60.1504ݔሻ ∗
ሺݔ − 1ሻ
0.75 =
= −1333.333333ݔ
ଷ
+ 4000ݔ
ଶ
− 3666.666667ݔ + 1000 +
+3047.6192ݔ
ଷ
− 3047.6192ݔ
ଶ
− 4571.4288ݔ
ଶ
+ 4571.4288ݔ −
−1333.3332ݔ
ଷ
+ 666.6666ݔ
ଶ
+ 1999.9998ݔ
ଶ
− 999.9999ݔ +
+160.4010667ݔ
ଷ
− 80.20053333ݔ
ଶ
− 160.4010667ݔ
ଶ
+ 80.20053333ݔ =
= 541.3537337ݔ
ଷ
− 1192.9832ݔ
ଶ
− 15.03723367ݔ + 1000
6
Powyższa postać wielomianu ma tylko zastosowanie dla funkcji w przedziale [0, 1.5] z kolei
dla funkcji w przedziale [-1.5, 1.5]:
ݓ
ሺݔሻ = |541.3537337ݔ
ଷ
| − |1192.9832ݔ
ଶ
| − |15.03723367ݔ| + 1000
c)
funkcji sklejanych
W przedziale [-5;5] znane są wartości funkcji dla 21 argumentów. W związku z tym można
dokonać podziału na 6 przedziałów, w dwóch z nich wyznaczone zostaną wielomiany
czwartego stopnia, zaś w czterech z nich wielomiany trzeciego stopnia.
Tak więc będą to przedziały: [-5;-3], [-3;-1.5], [-1.5;0], [0;1.5], [1.5;3], [3;5].
Interpolacja funkcji w przedziale [-5;-3]
x
-5
-4.5
-4
-3.5
-3
y
1,536098
2,318505
3,663004
6,12323
10,98901
ݓ
ሺݔሻ = ݂ሺݔ
ୀ
ሻ݈
ሺݔሻ
= ݂ሺݔ
ୀ
ሻ ∗
ሺݔ − ݔ
ሻሺݔ − ݔ
ଵ
ሻ … ൫ݔ − ݔ
ିଵ
൯൫ݔ − ݔ
ାଵ
൯ … ሺݔ − ݔ
ሻ
൫ݔ
− ݔ
൯൫ݔ
− ݔ
ଵ
൯ … ൫ݔ
− ݔ
ିଵ
൯൫ݔ
− ݔ
ାଵ
൯ … ൫ݔ
− ݔ
൯
=
= 1.536098 ∗
ሺݔ + 4.5ሻሺݔ + 4ሻሺݔ + 3.5ሻሺݔ + 3ሻ
ሺ−5 + 4.5ሻሺ−5 + 4ሻሺ−5 + 3.5ሻሺ−5 + 3ሻ +
+2.318505 ∗
ሺݔ + 4ሻሺݔ + 3.5ሻሺݔ + 3ሻሺݔ + 5ሻ
ሺ−4.5 + 4ሻሺ−4.5 + 3.5ሻሺ−4.5 + 3ሻሺ−4.5 + 5ሻ +
+3.663004 ∗
ሺݔ + 3.5ሻሺݔ + 3ሻሺݔ + 5ሻሺݔ + 4.5ሻ
ሺ−4 + 3.5ሻሺ−4 + 3ሻሺ−4 + 5ሻሺ−4 + 4.5ሻ +
+6.12323 ∗
ሺݔ + 3ሻሺݔ + 5ሻሺݔ + 4.5ሻሺݔ + 4ሻ
ሺ−3.5 + 3ሻሺ−3.5 + 5ሻሺ−3.5 + 4.5ሻሺ−3.5 + 4ሻ +
+10.98901 ∗
ሺݔ + 3ሻሺݔ + 5ሻሺݔ + 4.5ሻሺݔ + 4ሻ
ሺ−3.5 + 3ሻሺ−3.5 + 5ሻሺ−3.5 + 4.5ሻሺ−3.5 + 4ሻ =
= ሺ1.536098ݔ
ଶ
+ 13.056833ݔ + 27.649764ሻ ∗
ሺݔ + 3.5ሻሺݔ + 3ሻ
1.5
+
+ሺ2.318505ݔ
ଶ
+ 17.3887875ݔ + 32.45907ሻ ∗
ሺݔ + 3ሻሺݔ + 5ሻ
−0.375
+
+ሺ3.663004ݔ
ଶ
+ 23.809526ݔ + 38.461542ሻ ∗
ሺݔ + 5ሻሺݔ + 4.5ሻ
0.25
+
+ሺ6.12323ݔ
ଶ
+ 30.61615ݔ + 91.84845ሻ ∗
ሺݔ + 4.5ሻሺݔ + 4ሻ
−0.375
+
+ሺ10.98901ݔ
ଶ
+ 87.91208ݔ + 164.83515ሻ ∗
ሺݔ + 4.5ሻሺݔ + 4ሻ
−0.375
=
= ሺ1.536098ݔ
ସ
+ 9.984637ݔ
ଷ
+ 16.129029ݔ
ଶ
+ 13.056833ݔ
ଷ
+ 84.8694145ݔ
ଶ
+ 137.0967465ݔ + 27.649764ݔ
ଶ
+ 179.723466ݔ + 290.322522ሻ ∗
1
1.5 +
7
+ሺ2.318505ݔ
ସ
+ 18.54804ݔ
ଷ
+ 34.777575ݔ
ଶ
+ 17.3887875ݔ
ଷ
+ 139.1103ݔ
ଶ
+ 260.8318125ݔ + 32.45907ݔ
ଶ
+ 259.67256ݔ + 486.88605ሻ ∗
1
−0.375 +
+ሺ3.663004ݔ
ସ
+ 34.798538ݔ
ଷ
+ 82.41759ݔ
ଶ
+ 23.809526ݔ
ଷ
+ 226.190497ݔ
ଶ
+ 535.714335ݔ + 38.461542ݔ
ଶ
+ 365.384649ݔ + 865.384695ሻ ∗
1
0.25 +
+ሺ6.12323ݔ
ସ
+ 52.047455ݔ
ଷ
+ 110.21814ݔ
ଶ
+ 30.61615ݔ
ଷ
+ 260.237275ݔ
ଶ
+ 551.0907ݔ + 91.84845ݔ
ଶ
+ 780.711825ݔ + 1653.2721ሻ ∗
1
−0.375 +
+ሺ10.98901ݔ
ସ
+ 93.406585ݔ
ଷ
+ 197.80218ݔ
ଶ
+ 87.91208ݔ
ଷ
+ 747.25268ݔ
ଶ
+ 1582.41744ݔ + 164.83515ݔ
ଶ
+ 1401.098775ݔ + 2967.0327ሻ
∗
1
−0.375 =
= 1.024065333ݔ
ସ
+ 15.36098ݔ
ଷ
+ 85.76547167ݔ
ଶ
+ 211.213475ݔ + 193.548348 +
−6.18268ݔ
ସ
− 95.83154ݔ
ଷ
− 550.25852ݔ
ଶ
− 1388.01166ݔ − 1298.3628 +
+14.652016ݔ
ସ
+ 234.432256ݔ
ଷ
+ 1388.278516ݔ
ଶ
+ 3604.395936ݔ + 3461.53878 +
−16.32861333ݔ
ସ
− 220.43628ݔ
ଷ
− 1232.810307ݔ
ଶ
− 3551.4734ݔ − 4408.7256 +
−29.30402667ݔ
ସ
− 483.51644ݔ
ଷ
− 2959.706693ݔ
ଶ
− 7956.04324ݔ − 7912.0872ሻ =
= −36.13923867ݔ
ସ
− 549.991024ݔ
ଷ
− 3268.731532ݔ
ଶ
− 9079.918889ݔ
− 9964.088472
Interpolacja funkcji w przedziale [0;1.5]
x
0
0,5
1
1,5
y
1000
761,9048
333,3333
120,3008
ݓ
ሺݔሻ = ݂ሺݔ
ୀ
ሻ݈
ሺݔሻ
= ݂ሺݔ
ୀ
ሻ ∗
ሺݔ − ݔ
ሻሺݔ − ݔ
ଵ
ሻ … ൫ݔ − ݔ
ିଵ
൯൫ݔ − ݔ
ାଵ
൯ … ሺݔ − ݔ
ሻ
൫ݔ
− ݔ
൯൫ݔ
− ݔ
ଵ
൯ … ൫ݔ
− ݔ
ିଵ
൯൫ݔ
− ݔ
ାଵ
൯ … ൫ݔ
− ݔ
൯
=
= 1000 ∗
ሺݔ − 0.5ሻሺݔ − 1ሻሺݔ − 1.5ሻ
ሺ0 − 0.5ሻሺ0 − 1ሻሺ0 − 1.5ሻ +
+761.9048 ∗
ሺݔ − 0ሻሺݔ − 1ሻሺݔ − 1.5ሻ
ሺ0.5 − 0ሻሺ0.5 − 1ሻሺ0.5 − 1.5ሻ +
+333.3333 ∗
ሺݔ − 0ሻሺݔ − 0.5ሻሺݔ − 1.5ሻ
ሺ1 − 0ሻሺ1 − 0.5ሻሺ1 − 1.5ሻ +
+120.3008 ∗
ሺݔ − 0ሻሺݔ − 0.5ሻሺݔ − 1ሻ
ሺ1.5 − 0ሻሺ1.5 − 0.5ሻሺ1.5 − 1ሻ =
= ሺ1000ݔ − 500ሻ ∗
ሺݔ − 1ሻሺݔ − 1.5ሻ
0.5ሺ−1.5ሻ
+
+761.9048ݔ ∗
ሺݔ − 1ሻሺݔ − 1.5ሻ
−0.5ሺ−0.5ሻ +
+333.3333ݔ ∗
ሺݔ − 0.5ሻሺݔ − 1.5ሻ
0.5ሺ−0.5ሻ
+
+120.3008ݔ ∗
ሺݔ − 0.5ሻሺݔ − 1ሻ
1.5ሺ0.5ሻ
=

8
= ሺ1000ݔ
ଶ
− 1500ݔ + 500ሻ ∗
ሺݔ − 1.5ሻ
−0.75 +
+ሺ761.9048ݔ
ଶ
− 761.9048ݔሻ ∗
ሺݔ − 1.5ሻ
0.25 +
+ሺ333.3333ݔ
ଶ
− 166.66665ݔሻ ∗
ሺݔ − 1.5ሻ
−0.25 +
+ሺ120.3008ݔ
ଶ
− 60.1504ݔሻ ∗
ሺݔ − 1ሻ
0.75 =
= −1333.333333ݔ
ଷ
+ 4000ݔ
ଶ
− 3666.666667ݔ + 1000 +
+3047.6192ݔ
ଷ
− 3047.6192ݔ
ଶ
− 4571.4288ݔ
ଶ
+ 4571.4288ݔ −
−1333.3332ݔ
ଷ
+ 666.6666ݔ
ଶ
+ 1999.9998ݔ
ଶ
− 999.9999ݔ +
+160.4010667ݔ
ଷ
− 80.20053333ݔ
ଶ
− 160.4010667ݔ
ଶ
+ 80.20053333ݔ =
= 541.3537337ݔ
ଷ
− 1192.9832ݔ
ଶ
− 15.03723367ݔ + 1000
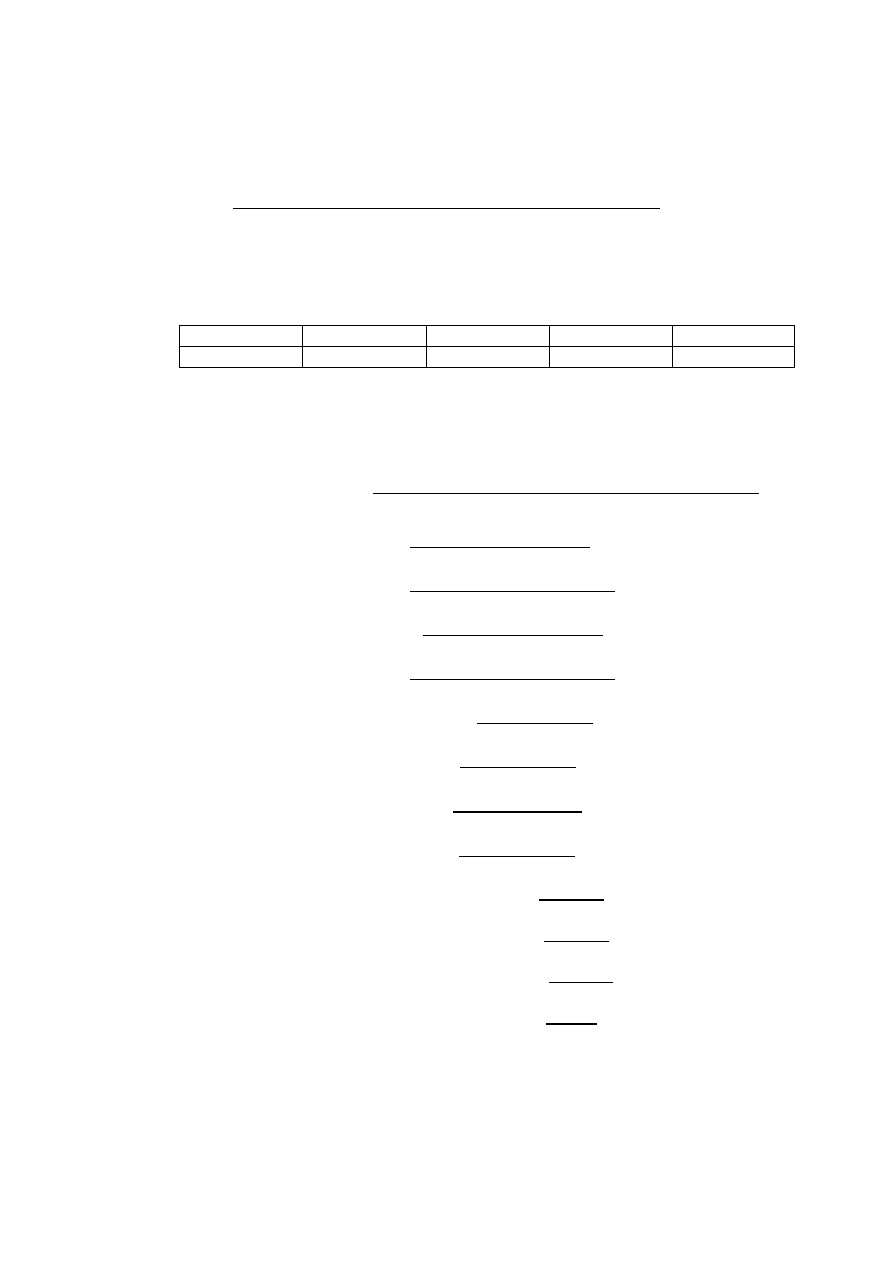
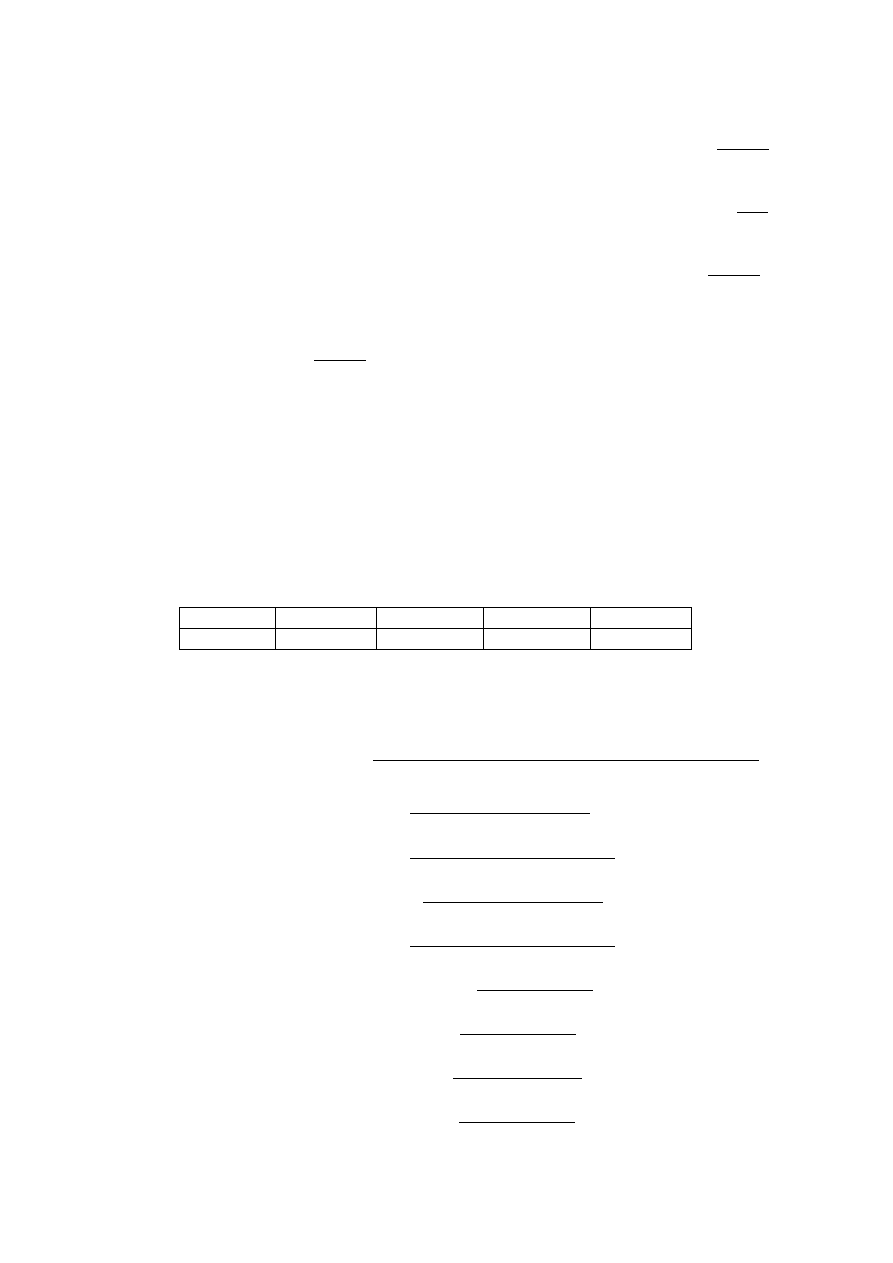
W programie Matlab możliwe jest graficzne przedstawienie rozwiązania metodą funkcji sklejanych.
Umożliwia to wpisanie następujących komend:
x = -5:5;
y = [1.536098 3.663004 10.98901 47.61905 333.3333 1000 333.3333 47.61905 10.98901 3.663004
1.536098];
cs = spline(x,[0 y 0]);
xx = linspace(-5,5,101);
plot(x,y,'o',xx,ppval(cs,xx),'-');
4.
Graficzna prezentacja wyników
Rozwiązanie metodą funkcji sklejanych wygląda następująco, po wykonaniu w programie Matlab:
9
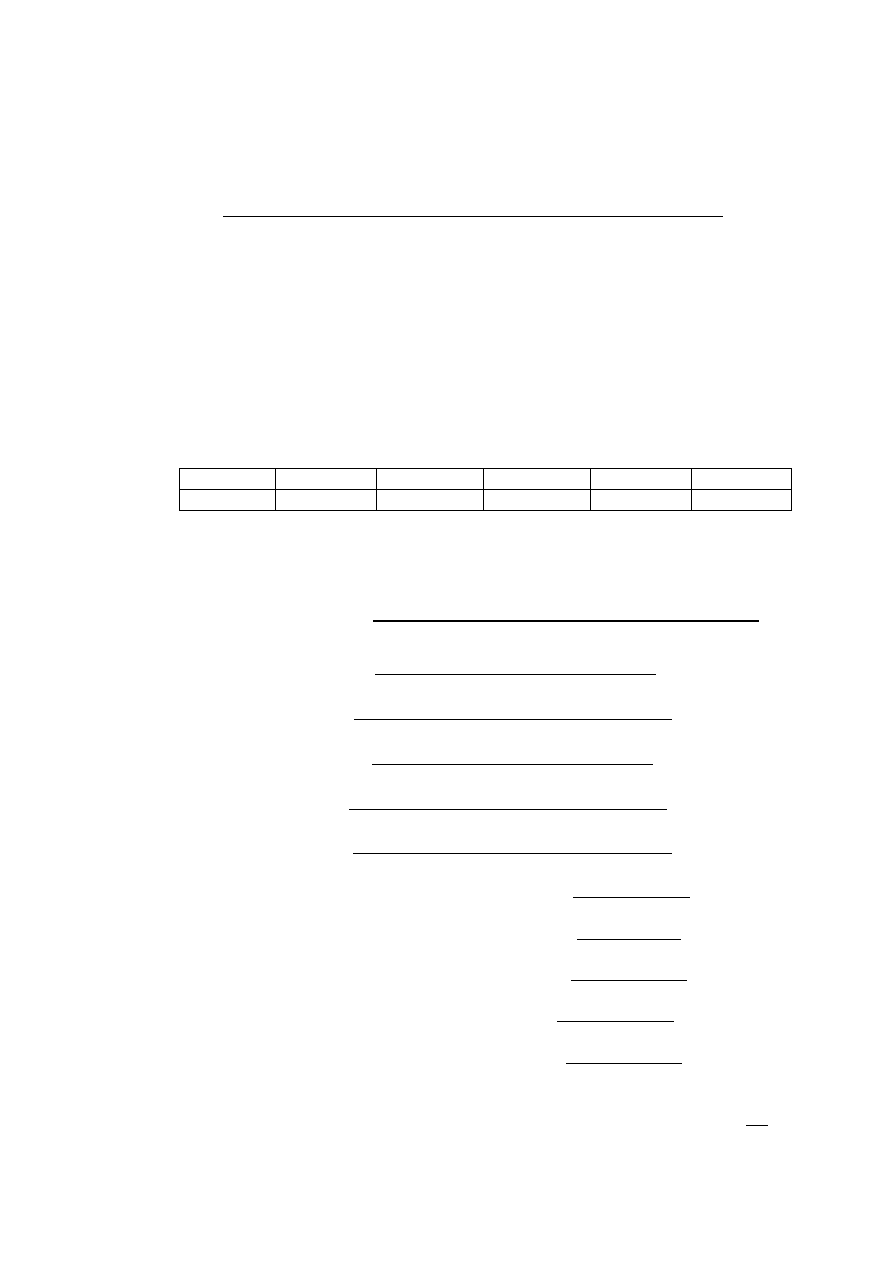
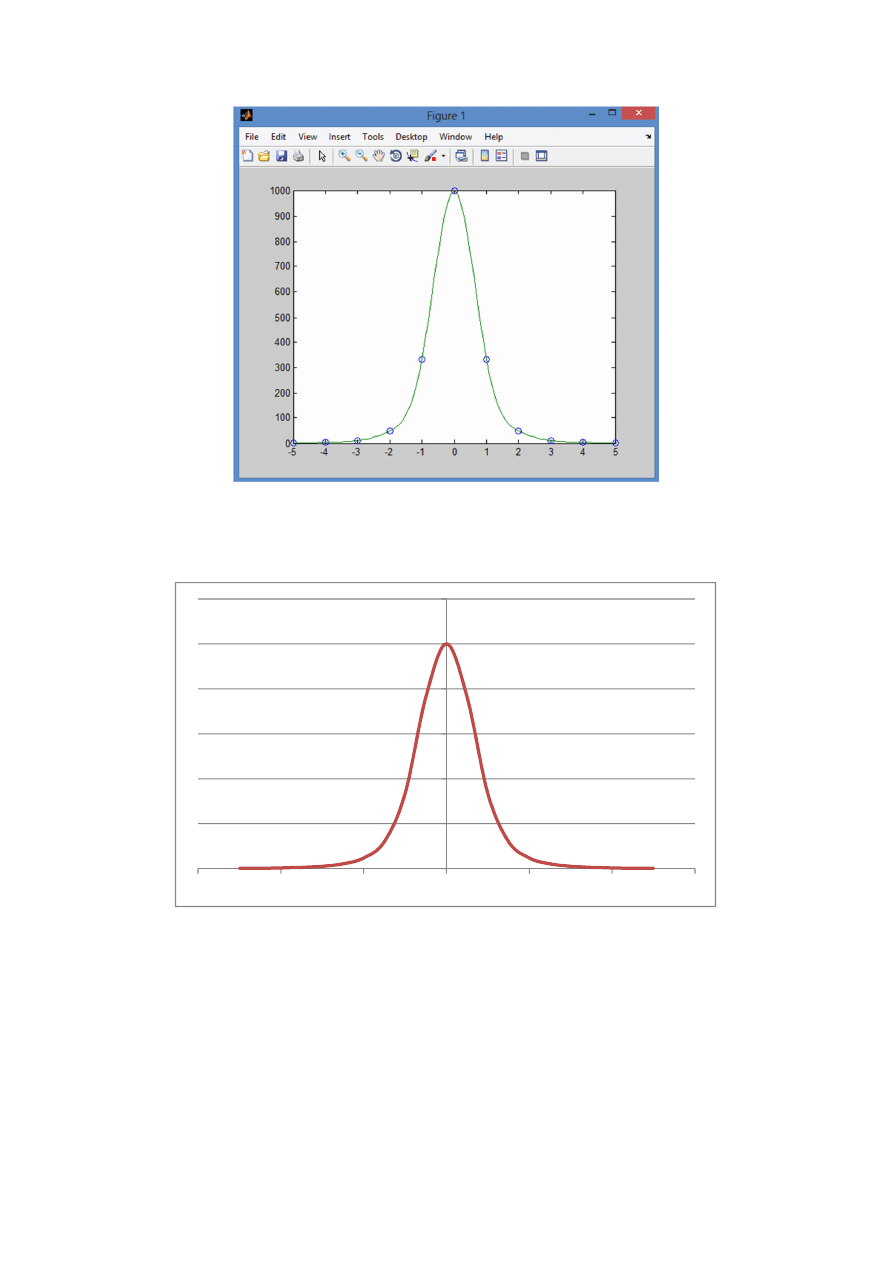
Rozwiązanie metodą Newtona wygląda z kolei następująco:
5.
Przedstawienie otrzymanych wyników
Wielomian wyznaczony metodą Newtona ma postać:
ܹሺݔሻ = |541.3537334ݔ
ଷ
| − |1192.9832ݔ
ଶ
| − |15.0372333ݔ| + 1000
Z kolei wyznaczony metodą Lagrange’a:
ݓ
ሺݔሻ = |541.3537337ݔ
ଷ
| − |1192.9832ݔ
ଶ
| − |15.03723367ݔ| + 1000
0
200
400
600
800
1000
1200
-6
-4
-2
0
2
4
6

10
Na podstawie powyższych wielomianów można wyznaczyć błąd interpolacji. Do jego określenia
można ustalić wartości jakie przyjmują funkcje dla argumentu wynoszącego: 0.1
Dla wielomianu wyznaczonego metodą Newtona wynosi ona 987,1077984034.
Dla wielomianu wyznaczonego metodą Lagrange’a wynosi ona 987,1077983667.
Błąd interpolacji liczymy więc następująco:
ߝ =
ሺଽ଼,ଵଽ଼ସଷସିଽ଼,ଵଽ଼ଷሻ
ଽ଼,ଵଽ଼ସଷସ
=1.013060581*10^-10
Wyszukiwarka
Podobne podstrony:
Fizjologia roślin (18.12.2013), Semestr III, Fizjologia Roślin, Wykłady
48 Praca organiczna Jay Friedman Organize ! 2013 06 09
C5 (X7) B1HD0105P0 17 18 12 2013 Sprawdzenie Układ zasilania paliwem pod wysokim ciśnieniem (Mo
Promocja praca domowa 12 11 15 Nieznany
18 12 06 Magdy
cwiczenia 1 18.10.2007 praca domowa b, cwiczenia - dr januszkiewicz
06 12 2013 Wykład
Egzamin MT 2013 06 12 rea
MPLP 378;379 06.07.;18.07.2013
cwiczenia 1 18.10.2007 praca domowa, cwiczenia - dr januszkiewicz
Tabela ocen - Word - Praca domowa na 06.02.2008, Informatyka
Java praca domowa 06
18 12 06 ja
2013 06 18 Gender na KUL
2013 06 18 Kobiety w armii USA
12 18 01 2013
18 12 06 Magdy
więcej podobnych podstron