ĆWICZENIE 11.
POMIARY PRĘDKOŚCI OBROTOWEJ
Kursywą oraz * zaznaczono rozszerzony program ćwiczenia
Pomiary obrotów silnika komutatorowego za pomocą czujników impulsowych,
magnetycznego i optycznego przy różnych napięciach zasilania..
Kalibracja tachogeneratora.
Opracowanie sprawozdania.
Zestaw do demonstracji i pomiarów prędkości obrotowej składa się z silnika elektrycznego,
przystosowanego do zasilania prądem zmiennym o napięciu 24 V z transformatora
bezpieczeństwa. Na osi silnika jest zamocowany wał tachoprądnicy, która służy bezpośrednio
do pomiarów prędkości obrotowej, oraz stalowe koło zębate. Zęby koła służą do generowania
impulsów przez zbliżeniowy czujnik indukcyjny, kiedy poszczególne zęby koła mijają czoło
czujnika. Dodatkowo w kole wykonane są otwory, przepuszczające światło, przeznaczone do
generowania impulsów przez światłowodowy czujnik optyczny.
Do zliczania impulsów stanowisko jest wyposażone w prosty licznik, pracujący w modzie
pomiaru częstotliwości, czyli zliczający impulsy w czasie 1 s.
Ponieważ impulsy generowane przez czujniki mają różne kształty, do tego zależne od
prędkości obrotowej, dla zapewnienia poprawnej pracy licznika impulsy są przetwarzane
przez układ elektroniczny na impulsy standaryzowane, o czasie trwania ok. 1 ms.
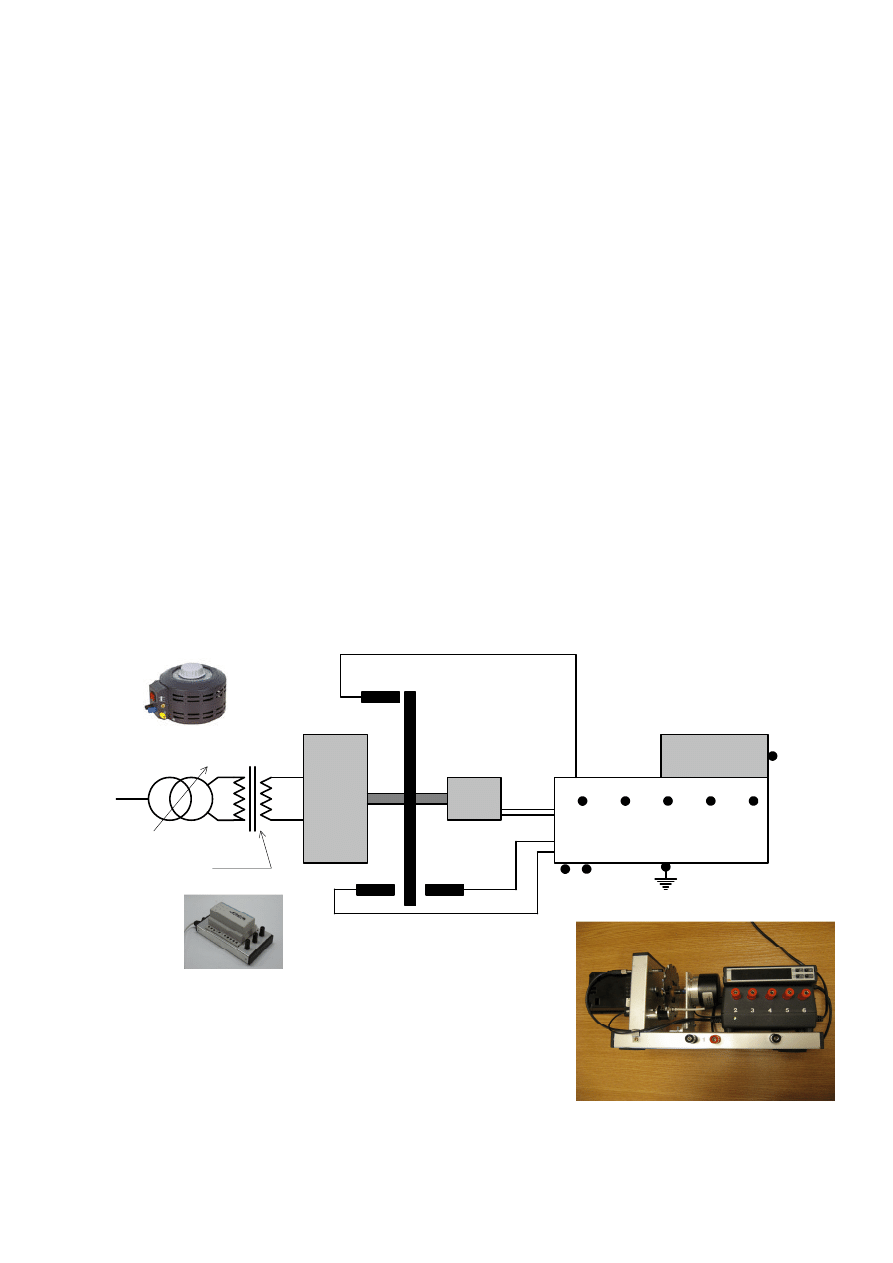
Schemat blokowy zestawu przedstawiono na rysunku 11.1:
1
2
3
4
5
6
7
Autotransformator
Tr. bezpieczeńswtwa
Silnik
Tarcza
Cz. indukcyjny
Cz. optyczny
Światłowody
Tachoprądnica
Licznik
Układy elektroniczne
Objaśnienie zacisków układów elektronicznych:
1. Zaciski wyjściowe tachoprądnicy
2. Wyjście impulsów czujnika optycznego
3. Wyjście impulsów czujnika indukcyjnego
4. Wejście przetwornika kształtu impulsów
5. Wyjście przetwornika kształtu impulsów
6. Wyjście filtru
Rys. 11.1
1. Pomiar prędkości obrotowej czujnikiem indukcyjnym
Stalowa tarcza wirująca posiada 22 zęby i każdy z nich przemieszczając się wzdłuż czoła
czujnika indukcyjnego daje impuls. W rezultacie, aby określić prędkość obrotową w obrotach
na sekundę, należy zliczyć impulsy w czasie 1 sekundy i podzielić wynik przez liczbę zębów.
Wyjście impulsów czujnika (3) należy połączyć z wejściem układu formującego (4), a
wyjście układu formującego (5) połączyć z wejściem licznika impulsów (7). Licznik musi
pracować w modzie pomiaru częstotliwości.
Dla różnych wartości napięcia zasilającego silnik, nastawianych na autotransformatorze,
należy odczytać i zapisać w tabeli częstotliwość zmierzoną przez licznik, a następnie
przeliczyć wynik na obroty na sekundę.
Napięcie [V]
Częstotliwość [Hz]
Obroty [1/s]
2. Pomiar prędkości obrotowej czujnikiem optycznym i skalowanie tachoprądnicy
Tarcza wirująca na obwodzie posiada 11 otworów i każdy z nich przemieszczając się wzdłuż
czoła czujnika daje impuls. Aby określić prędkość obrotową tarczy należy zatem podzielić
wartość częstotliwości impulsów przez 11.
Wejście układu formującego (4) przełączyć na wyjście impulsów czujnika optycznego (2).
Na zaciski wyjściowe (1) tachoprądnicy należy przyłączyć woltomierz cyfrowy.
Dla różnych wartości napięcia zasilającego silnik, nastawianych na autotransformatorze,
należy odczytać i zapisać w tabeli częstotliwość zmierzoną przez licznik oraz napięcie
tachporądnicy zmierzone woltomierzem. Następnie należy przeliczyć wyniki pomiaru
częstotliwości na obroty na sekundę.
Napięcie
zasilające silnik
[V]
Częstotliwość
[Hz]
X = Obroty [1/s]
Y = Napięcie
tachoprądnicy [V]
3. * Wyznaczanie stałej kalibracji tachoprądnicy
Nanieść wyznaczone punkty charakterystyki tachoprądnicy na załączony układ
współrzędnych.
Zależność napięcia tachoprądnicy od prędkości obrotowej jest liniowa. Można zatem
poszukać linii prostej, która najlepiej przybliży taką zależność na podstawie wyznaczonych
punktów. Można do tego celu wykorzystać tzw. metodę najmniejszych kwadratów, która
gwarantuje, że suma kwadratów błędów, czyli odchyłek wyznaczonych punktów od linii
prostej aproksymującej charakterystykę, będzie minimalna.
Dla wyznaczenia takiej prostej aproksymującej należy obliczyć następujące wyrażenia, gdzie
n – liczba uwzględnionych punktów:
Przykład dla n = 7 danych
X
i
=
X1
X2
X3
X4
X5
X6
X7
Y
i
=
Y1
Y2
Y3
Y4
Y5
Y6
Y7
Zakłada się, że wartości Y i X związane są zależnością:
Y = AX + B
Szukane są takie wartości A i B dla których suma kwadratów różnic pomiędzy wartościami Y
i
danych (z tabeli) i obliczonymi dla X
i
z zależności Y = AX + B jest najmniejsza, czyli
minimalizuje się zależność:
(
)
2
7
n
1
i
i
B
AX
Y
S
∑
=
−
−
=
S osiągnie najmniejszą wartość jeżeli równocześnie pochodne
0
B
S
i
0
A
S
=
∂
∂
=
∂
∂
co
prowadzi do równań:
2
2
3
1
2
4
S
S
n
S
S
S
n
A
−
⋅
⋅
−
⋅
=
=..................
2
2
3
4
2
3
1
S
S
n
S
S
S
S
B
−
⋅
⋅
−
⋅
=
=......................
Y = U [V]
X = Obr/s
gdzie oznaczono:
∑
=
=
n
1
i
i
1
Y
S
=..................;
∑
=
=
n
1
i
i
2
X
S
=..................
∑
=
=
n
1
i
2
i
3
X
S
= ...............:
i
n
1
i
i
4
X
Y
S
⋅
=
∑
=
=.............
Dla wyznaczonych wartości A i B obliczyć wartości Y dla kilku wartości X , wpisać do tabeli,
nanieść na układ współrzędnych i wykreślić linię prostą.
X
Y
4. Pomiar prędkości obrotowej metodą uśredniania impulsów.
Do pomiaru prędkości obrotowej metodą impulsową nie jest konieczne używanie
elektronicznego licznika impulsów. Impulsy bowiem można, za pomocą filtracji, przetworzyć
na napięcie stałe, które z kolei można mierzyć zwykłym woltomierzem.
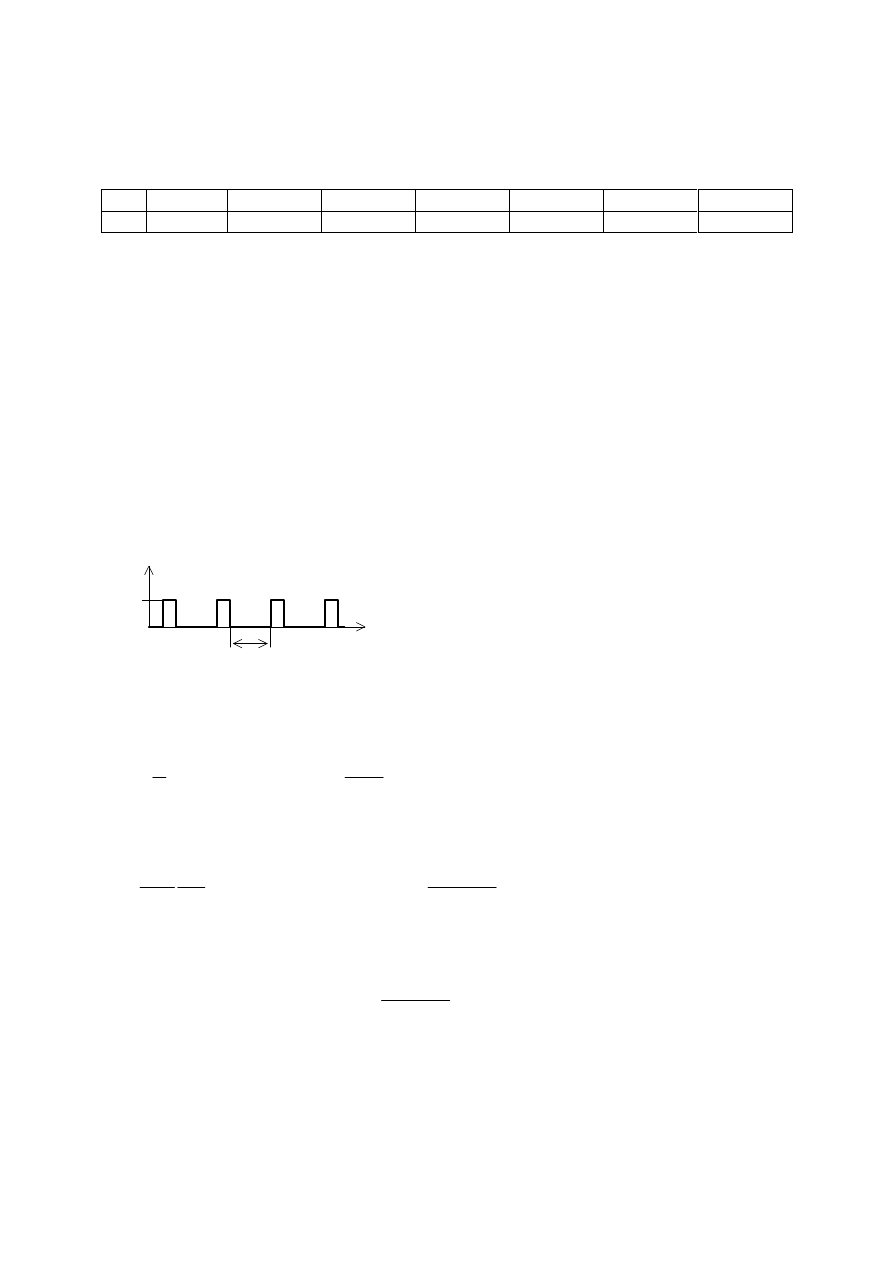
Aby tak uzyskane napięcie stałe było proporcjonalne do prędkości obrotowej kształt
impulsów, uśrednianych za pomocą filtru dolno-przepustowego, musi być ściśle określony.
To znaczy, że zarówno amplituda impulsów jak i czas trwania każdego impulsu musi być
znany i niezmienny.
W zestawie impulsy czujników mogą być w ten sposób formowane przez układ przetwornika
kształtu impulsów (4, 5). Jeżeli zatem na wyjście tego przetwornika zostanie włączony układu
filtru, to na jego wyjściu (6) pojawi się napięcie proporcjonalne do prędkości obrotowej.
t
τ
m
U
T
Jeżeli liczna impulsów na jeden obrót tarczy wynosi
N
, a tarcza obraca się z prędkością
kątową ω, to wartość średnia U
śr
takich impulsów jest równa:
m
śr
U
T
U
⋅
τ
=
, gdzie
N
T
⋅
ω
π
= 2
- czas pomiędzy dwoma kolejnymi impulsami
Prędkość kątowa (w radianach na sekundę) może być więc wyznaczona z zależności:
śr
m
śr
U
K
U
U
N
⋅
=
⋅
τ
π
=
ω
2
, gdzie stała
m
U
N
K
⋅
⋅
τ
π
=
2
a prędkość obrotowa ( w obrotach na sekundę):
śr
o
U
K
obr
⋅
=
, gdzie stała
m
o
U
N
K
⋅
⋅
τ
=
1
[obr/sV]
Podłączyć oscyloskop do wyjścia (5) układu przetwornika kształtu impulsów.
Uruchomić układ przy napięciu znamionowym sieci 240 V ustawionym na
autotransformatorze.
Zmierzyć amplitudę
U
m
(w woltach) i czas trwania τ impulsów na wyjściu (5) przetwornika
kształtu impulsów.
W zależności od użytego czujnika uwzględnić wartość
N
(optyczny N = 11, indukcyjny N =
22) i obliczyć stałą
K
o
.
m
o
U
N
K
⋅
⋅
τ
=
1
=
Filtr jest wbudowany w układ i podłączony wewnątrz do zacisku (5) wyjścia układu
przetwornika kształtu impulsów. Na wyjście filtru (6) podłączyć woltomierz cyfrowy.
Odczytać wartość napięcia U i obliczyć prędkość obrotową tarczy, uwzględniając wartość
stałej
K
o
.
Napięcie U [V]
Stała
K
o
[Obr/sV]
Obroty [1/s]
Aparatura:
1. Autotransformator
2. Transformator bezpieczeństwa
3. Zespół wirujący z czujnikiem indukcyjnym, czujnikiem światłowodowym,
tachoprądnicą, licznikiem impulsów, filtrem
4. Oscyloskop
5. Woltomierz cyfrowy
Wyszukiwarka
Podobne podstrony:
Biofizyka2 cw11, Biofizyka, V Semestr, Biofizyka II, ćwiczenia
PSE Cw11
cw11 Badanie przebiegow okresowych
sprawozdaniiiie kasia cw11
cw11-spr, Politechnika
cw11 2
ćw11 - Badania właściwości materiałów łożyskowych, Wstępy na materiałoznawstwo
Informatyka zadanie 14 06 10 Tomasiewicz ćw11,12 Etykiety?resowe
Cw11 inst
projekt 11, MPKL ćw11, ORGANIZACJA I ZARZĄDZANIE PRODUKCJĄ
SIP Lab cw11
cw11 id 100602 Nieznany
cw11 rownowagi redox
Cw11, Politechnika Wrocławska - Materiały, fizyka 2, paczka 1, 11 modul younga predkosc dzwieku
inżynieria ćw11, Studia, I o, rok II, semestr III, inżynieria materiałowa, od Asi
więcej podobnych podstron