Optymalizacja konstrukcji
Przystępując do kształtowania
konstrukcyjnego, tj. nadania właściwych
cech przeszłej maszynie, należy określić z
jakiego punktu widzenia (wg jakiego
kryterium oceny) będą oceniane
alternatywne rozwiązania.
Ścisłe (sformułowane matematycznie)
określenie punktu widzenia nazywa się
funkcją celu (funkcją jakości, funkcją
efektywności), zaś sam punkt oceny nazywa
się a kryterium optymalizacji.
Uzyskanie funkcji celu wymaga zbudowania
odpowiedniego modelu matematycznego.
Optymalizacja to działalność, której
celem jest uzyskanie najlepszego
rezultatu w danych warunkach i dla
określonej funkcji celu.
Najlepszy z otrzymanych wyników
nazywa się optymalnym.
Załóżmy, że rozpatruje się trzy rodzaje
przekładni o tej samej mocy i przełożeniu :
• ślimakową,
• planetarną,
• walcową.
Załóżmy też, że kryterium optymalizacji są
najmniejsze gabaryty tej przekładni, które
można wyrazić w funkcji pozostałych cech
konstrukcyjnych.
Z punktu widzenia zadanego kryterium a
więc wymiarów gabarytowych, optymalnym
rozwiązaniem jest przekładnia planetarna.
Model matematyczny
konstrukcji
Zbudowanie funkcji celu, niezbędnej
w procesie optymalizacji konstrukcji,
wymaga zapisu cech konstrukcyjnych
maszyny (geometrycznych,
materiałowych i dynamicznych) w
postaci układu liczb i funkcji.
Uzyskany w ten sposób zapis nazywa
się modelem matematycznym
konstrukcji.
Dla potrzeb modelowania
matematycznego, konstrukcję
K
można
potraktować jako punkt w pewnej
przestrzeni
N
-wymiarowej czynnikowej,
co można zapisać następująco:
K = (C
1
,C
2
,...,C
N
)
R
N
gdzie:
K
- konstrukcja,
C
i
- cechy konstrukcji,
R
N
- przestrzeń konstrukcji.
Jeżeli wszystkie współrzędne wektora
K
są liczbami, to taki punkt można
traktować jako element
N
- wymiarowej
przestrzeni euklidesowej
E
N
:
K = (C
1
, C
2
,...,C
N
)
E
N
Wektor
K
należący do przestrzeni
konstrukcji jednoznacznie opisuje
konstrukcję.
p
D
z
D
D
w
d

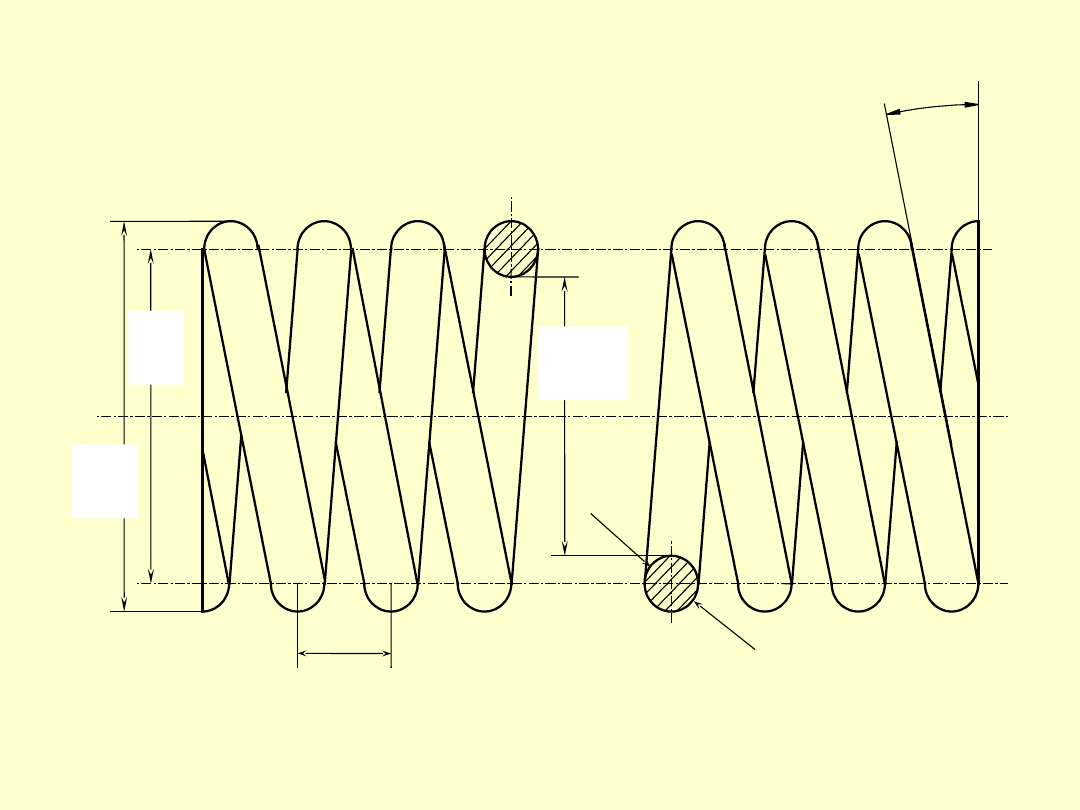
Niech opisywanym elementem będzie
śrubowa sprężyna naciskowa.
Umiejscowienie jej środka ciężkości w
maszynie można określić za pomocą
wartości liczbowych trzech
współrzędnych.
Następne współrzędne mogą opisywać,
np. średnicę drutu, średnicę nawinięcia
drutu, granicę plastyczności materiału
sprężyny, wartość siły napięcia
wstępnego, itp.
Wszystkie cechy opisujące konstrukcję
można podzielić na:
parametry
P
zmienne decyzyjne
X
.
Parametry
P
są zadane i ich wartość jest
niezmienna w procesie projektowania.
Natomiast zmienne decyzyjne
X
są
dobierane w procesie projektowania.
W przypadku rozpatrywanej sprężyny:
parametrami
P
mogą być np.: wartość
siły napięcia wstępnego i wymiary
zewnętrzne sprężyny,
zaś zmiennymi decyzyjnymi
X
, np.
średnica drutu, granica plastyczności
materiału
sprężyny
(materiał
sprężyny).
Biorąc pod uwagę podział cech konstrukcyjnych
na parametry
P
i zmienne decyzyjne
X
,
konstrukcje można formalnie zapisać
następująco:
K = (P
1
, P
2
,...,P
N
; X
1
,X
2
,...X
M
)
E
K
Z kolei zbiór zmiennych decyzyjnych
X
można
traktować jako punkt
x
w pewnej przestrzeni,
zwanej przestrzenia zmiennych decyzyjnych
(przestrzenia rozwiązań)
E
x
:
x = (x
1
, x
2
,…,x
n
) E
x
Na złożoność modelu matematycznego
wpływa
głownie
liczba
zmiennych
decyzyjnych.
Im jest ona większa, tym trudniejsze i
kosztowniejsze jest prowadzenie obliczeń.
Z drugiej zaś strony, ograniczenie liczby
zmiennych decyzyjnych i ustalenie dużej
liczby
cech
konstrukcyjnych
jako
parametrów
zawęża
możliwości
poszukiwana najlepszych rozwiązań.
Matematyczne sformułowanie
szczegółowych i ogólnych zasad
konstrukcji
Konstruktor może przyjmować tylko
określone wartości zmiennych
decyzyjnych
X
.
Wynika to z ograniczeń narzuconych
na poszczególne zmienne decyzyjne i
na konstrukcję jako całość.
Ograniczenia te wynikają ze
szczegółowych zasad konstrukcji.
Zgodnie z pierwszą zasadą, konstrukcja
powinna spełniać wszystkie ograniczenia
wynikające ze szczegółowych zasad w
stopniu nie mniejszym od założonego.
Z matematycznego punktu widzenia,
ograniczenia te mogą mieć charakter
nierównościowy:
b
i
(x)= b
i
(x
1
,x
2
,...,x
n
)= 0; i = 1,2,...,m
g
j
(x)=g
j
( x
1
,x
2
,...,x
n
)=0; j=1,2,...,p
Dla każdej zmiennej decyzyjnej
x
i
można
ustalić wstępnie zakres jej zmienności:
x
imin
≤ x
i
≤ x
imax;
i = 1,...,n
Na skutek ograniczeń wynikających ze
szczegółowych zasad konstrukcji
przedział ten ulega zawężeniu.
Niektóre zmienne decyzyjne mogą
przyjmować dowolne wartości z ciągłego
przedziału [
x
imin
,
x
imax
], a inne mogą
przyjmować tylko wartości dyskretne.
Zmienne decyzyjne wynikające ze
względów fizycznych i
technologicznych, takie jak np.:
wymiary,
obciążenia,
naprężenia., itp.
mają z reguły charakter ciągły.
Zmienne decyzyjne ściśle określone
przez normy, takie jak np.:
moduły kół zębatych,
wymiary łożysk tocznych,
wymiary śrub, nitów, itp.,
mają charakter dyskretny i ich zakres
zawęża się do zbioru liczb dyskretnych.
Zmienne decyzyjne ściśle określone
przez normy, takie jak np.:
moduły kół zębatych,
wymiary łożysk tocznych,
wymiary śrub, nitów, itp.,
mają charakter dyskretny i ich zakres
zawęża się do zbioru liczb dyskretnych.
Inne wartości zmiennych decyzyjnych
są dyskretne z założenia, np. liczba
zębów w kole zębatym.
Jednakże, zdecydowana większość
ograniczeń ma charakter
nierównościowy, np.:
liczba zębów w kole zębatym nie
może być mniejsza niż graniczna liczba
zębów,
obciążenie nie może wywoływać
naprężeń większych od dopuszczalnych,
prędkość obwodowa czopa podczas
smarowania hydrodynamicznego musi
być większa od granicznej.
W procesie budowy modelu
matematycznego konstrukcji
K
wszystkie ograniczenia wynikające ze
szczegółowych zasad konstrukcji musza
być przedstawione w postaci
jednoznacznej matematycznie, tak aby
dla dowolnego wektora zmiennych
decyzyjnych
X
można było
jednoznacznie stwierdzić, czy należy on
do zbioru rozwiązań dopuszczalnych, a
więc czy są spełnione wszystkie
ograniczenia, czy też nie.
Zbiór punktów w przestrzeni zmiennych
decyzyjnych
X
, w których spełnione są
wszystkie ograniczenia narzucone przez
konstrukcję
K
, nazywa się zbiorem
dopuszczalnym lub zbiorem rozwiązań
dopuszczalnych:
Φ= Φ (x)
E
x
Konstrukcja spełniająca pierwszą ogólną
zasadę konstrukcji (a ściślej - wektor
zmiennych decyzyjnych
x
) musi należeć
do zbioru rozwiązań dopuszczalnych.
Matematyczny zapis tej zasady jest
następujący:
x Φ E
x
Konstrukcja
K
należąca do zbioru
dopuszczalnego
Φ
jest poprawna
( dobra), a konstrukcja
K
nie należąca
do zbioru
Φ
jest niedobra.
W celu wyboru ze zbioru rozwiązań
dobrych
Φ
rozwiązania najlepszego,
konieczne jest ustalenie kryteriów
optymalizacji
Q
.
Druga ogólna zasada konstrukcji mówi,
że konstrukcja powinna być optymalna
(polioptymalna) w danych warunkach ze
względu na przyjęte kryterium
optymalizacji, np.:
najmniejszy ciężar,
największa wytrzymałość, itp.
Dobór kryteriów jest zadaniem bardzo
odpowiedzialnym i złożonym.
Zadanie optymalizacji można
przedstawić w kategoriach działania
praktycznego, tj. osiągnięcie:
– pożądanego efektu przy
najmniejszych nakładach,
– największego efektu przy
wykorzystaniu zadanych nakładów.
Reguły te maja charakter praw
ekonomicznych i już w tym podejściu
widać jak istotny jest dobór
kryteriów.
Szczególnie niebezpieczne jest
uleganie wyłącznie kryteriom
ekonomicznym.
Może to bowiem prowadzić do
niebezpiecznych skutków
ekologicznych, społecznych, a nawet
technicznych.
W procesie, projektowania należy
przede
wszystkim
uwzględniać
kryteria techniczne, nie zapominając
jednak o ekonomicznych.
Kryteria techniczne wynikają ze
szczegółowych zasad konstrukcji.
Są to kryteria funkcjonalności,
trwałości,
niezawodności,
sprawności,
lekkości,
taniości
i
dostępność materiałów, itp..
W projektowaniu wspomaganym
komputerowo należy każde kryterium
przedstawić jako funkcję zależną od
zmiennych decyzyjnych
X
.
Wówczas model matematyczny
konstrukcji, który składa się z wektora
zmiennych decyzyjnych
x
, zbioru
dopuszczalnego
Φ
i kryterium
optymalizacji
Q
, można zapisać
następująco:
x
= (x
1
,x
2
,...,x
n
) E
x
Φ
=
Φ
(x) E
x
Q
=
Q
(x
1
,x
2
,...,x
n
)
Istnieje wiele metod poszukiwania
rozwiązań optymalnych.
Ogólnie można je podzielić na
dwie zasadnicze grupy:
–
metody analityczne, np. metoda
pochodnych, metoda wariacyjna,
metoda wyznaczników Lagrange'a,
– metody numeryczne, np.
programowanie liniowe (metoda
simplex), programowanie
nieliniowe.
Przykład - zadanie
Przesyłki przewożone na statku mogą
być pakowane w skrzynie, których
suma wszystkich boków podstawy i
wysokości nie przekracza 240 cm, zaś
podstawa jest kwadratem.
W przeciwnym razie naliczane są
opłaty dodatkowe.
Obliczyć wymiary skrzyni
maksymalizujące jej objętość.
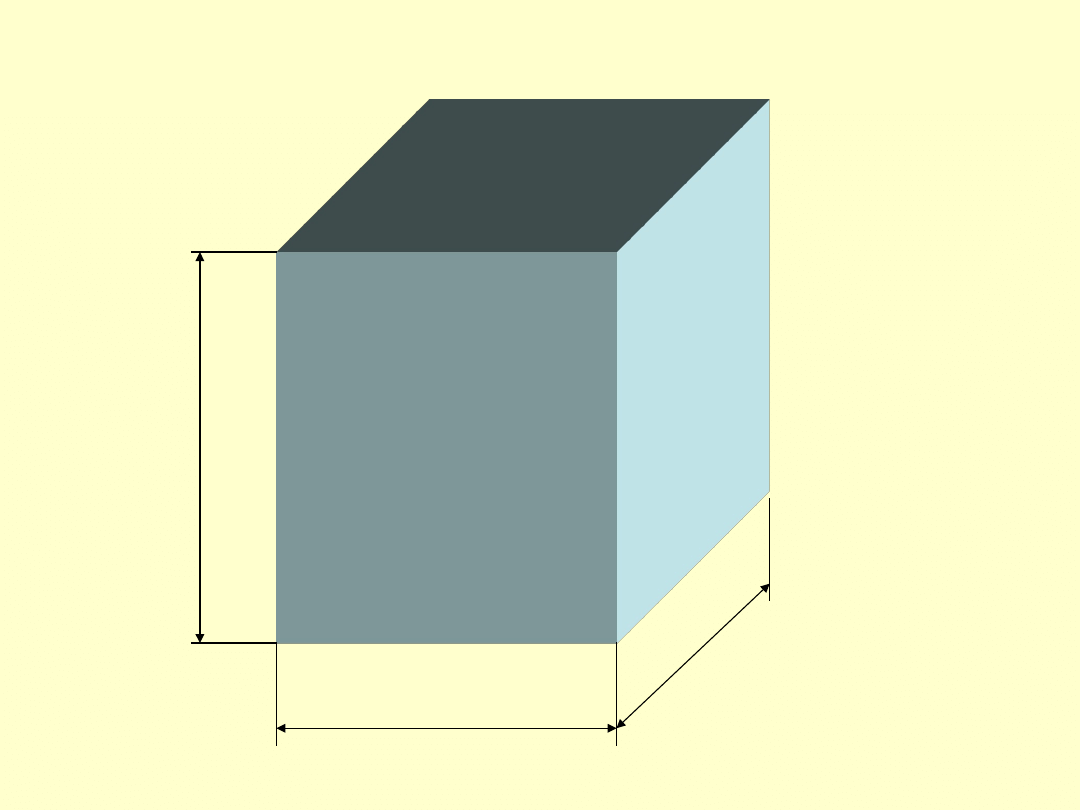
x
x
H
Metoda pochodnych
Metoda pochodnych zasadza się na wyznaczeniu
dwóch pochodnych w celu znalezienia wartości
ekstremalnych danej funkcji celu
Q
(
x
).
W pierwszym kroku, dla znalezienia wartości
ekstremalnych wyznacza się pierwszą pochodną
funkcji
Q
(
x
) i przyrównuję się ją do zera a następnie
oblicza się wartość zmiennej niezależnej
x
.
0
d
d
x
Q
Równanie to pozwala na wyznaczenie wartości
ekstremalnych.
W kroku drugim wyznacza się druga pochodną
funkcji
Q
(
x
). Jeśli wyznaczone wartości ekstremalne
są mniejsze od zera to funkcja osiąga maksimum,
jeśli większe od zera to funkcja osiąga minimum.
0
d
d
2
2
x
Q
funkcja
Q
(
x
) osiąga
maksimum
0
d
d
2
2
x
Q
funkcja
Q
(
x
) osiąga
minimum
Funkcja celu ma postać:
H
x
x
Q
2
Ograniczenie równościowe ma postać:
0
240
4
x
H
x
b
Wyznaczając H z poprzedniego równania:
240
4
x
H
i podstawiając do funkcji celu uzyskuje się:
2
3
240
4
x
x
x
Q
Pierwsza pochodna ma postać:
0
480
12
d
d
2
x
x
x
Q
Rozwiązaniem tego równania są
wartości:
x
1
= 0 oraz
x
2
= 40.
W celu upewnienia się czy funkcja
Q
(
x
)
osiąga maksimum przy
x
2
= 40,
wyznacza się drugą pochodną:
0
480
24
d
d
2
2
x
x
Q
i oblicza się jej wartość dla
x
2
= 40:
480
2
2
d
d
40
1
x
Q
x
Następnie oblicza się
H
z zależności na
ograniczenie równościowe:
cm
80
80
4
240
4
240
x
H
Wówczas największa pojemność skrzyni
wyniesie:
3
2
2
cm
128000
80
40
H
x
V
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
Wyszukiwarka
Podobne podstrony:
Projekt optymalizacja konstrukcji
optymalizacja konstrukcji
Podstawy Optymalizacji Konstrukcji (opracowanie Ostwald)
11 Optymalizacja konstrukcji
Projektowanie i optymalizacja konstrukcji sprężonych
Projekt optymalizacja konstrukcji
POP zaliczenie 2014 MiBM II stopnia, mechanika i budowa maszyn, Podstawy optymalnego projektowania k
Konstrukcja optymalnego portfela inwestycyjnego (12 stron) GQLSNHSLNDJLFQK3HRISJHPTYK4CLRVYPTBPACY
Optymalizacja LP
Materiały konstrukcyjne
konstrukcja rekombinowanych szczepów, szczepionki
konstrukcje stalowe
Zasady ergonomii w optymalizacji czynności roboczych
więcej podobnych podstron