11. OPTYMALIZACJA KONSTRUKCJI
1
11.
11. OPTYMALIZACJA KONSTRUKCJI
11.1. Wprowadzenie
1. Optymalizacja potocznie i matematycznie
2. Przykład
3. Kryterium optymalizacji
4. Ograniczenia w zadaniach optymalizacji
5. Sformułowanie zadania optymalizacji
6. Podział zadania optymalizacji
7. Przykład zadania
8. Optymalizacja wymiarów
9. Optymalizacja kształtu
10.Optymalizacja topologii
h
L
l
α
A
R
,I
R
A
S
,I
s
P
1. Rozwiązanie → liczba 1 np.12400zł (w zależności od parametrów L
1
,l
1
,I
1
,α
1
...)
2. Rozwiązanie → liczba 2 np.11700zł (w zależności od parametrów L
2
,l
2
,I
2
,α
2
...)
11.2. Kryteria optymalizacji
1. minimum kosztów,ciężaru lub objetości
Należy rozważyć czy cała konstrukcja wykonana będzie z tego samego materiału czy z różnych
materiałów o innych ciężarach. Proporcja wielkości M+R+S (gdzie M-materiał,R-robocizna,
S-sprzęt) może znacząco wpływać na optymalizację
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
11. OPTYMALIZACJA KONSTRUKCJI
2
2. minimum energii:
•
potencjalnej
•
odkształcenia
•
sprężystej
3. maksimum sztywności(aby zapewnić jak najmniejszą odkształcalność konstrukcji)
4. minimum przemieszczeń
5. minimum odkształceń konfiguracji początkowej
6. maksimum siły krytycznej(np. przy dodwaniu do konstrukcji dodatkowych blach porównujemy
rozwiązania dla różnych przypadków ich miejsca przyłożenia i wybieramy to przy którym zmiana
wielkości siły krytycznej jest najoptymalniejsza)
7. maksimum częstości drgań własnych
ω
1
ω
ω
2
ω
3
max
Jeśli np. wielkość częstości drgań maszyny zamontowanej na konstrukcji zawiera się pomiędzy
pierwszą i drugą częstością drgań własnych należy rozważyć czy zmiana któregoś z parametrów
(np. wymiaru elementu) nie wpłynie korzystnie na rozsunięcie się przedziału między pierwszą i
druga częstością drgań własnych.
8. maksimum momentu bezwładności (np.w zależności od stounku boków prostokąta przy tym
samym polu mamy inne wartości momementów bezwładności danego przekroju).
9. maksimum niezawodności (niezawodność wyrażamy liczbami)
10.maksimum bezpieczeństwa
11.3. Parametry
1. Opisujące (O): h,b,L,E...(wymiary,charakterystyka materiału)
2. Wymuszające (W): P,q...(obciążenia)
3. Reakcje (R): u,ε,σ,R,M...
11.4. Ograniczenia występujące w optymalizacji konstrukcji.
1. Nieprzekraczanie wytężeń lub zapewnienie bezpieczeńtwa (dla wszystkichstanów obciążenia,np.
przy obciążeniu wiatrem należy rozważyć różne schematy przyłożenia tego obciążenia i wybrać
najniekorzystniejszy).
≪
M
≪M
(11.1)
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
11. OPTYMALIZACJA KONSTRUKCJI
3
2. Nieprzekraczanie dopuszczalych wartości przemieszczeń
u
≪u
(11.2)
3. Nieprzekraczanie minimalnych i maksylanych dopuszczalnych wymiarów elementów (względy
użytkowe i technologiczne).
s
min
ss
max
(11.3)
Przy formułowaniu zadania optymalizacji należy zastanowić się i podjąć decyzję jakie jest główne
kryterium, jakie są ograniczenia i jakimi parametrami możemy sterować w celu zoptymalizowania
konstrukcji.
11.5. Sformułowanie zadania optymalizacji
1. Przyjęcie funkcji celu.
Funkcja ta ma być minimalna ze względu na parametry sterujące.
F
s min
(11.4)
2. Wybór zmiennej sterującej.
Możemy sterować tylko jednym parametrem a także zespołem parametrów,wektorem,tensorem.
3. Wprowadzenie ograniczeń równościowych g
s=0 lub nierównościowych g s≤0 oraz
określenie ograniczeń zmiennych decyzyjnych.
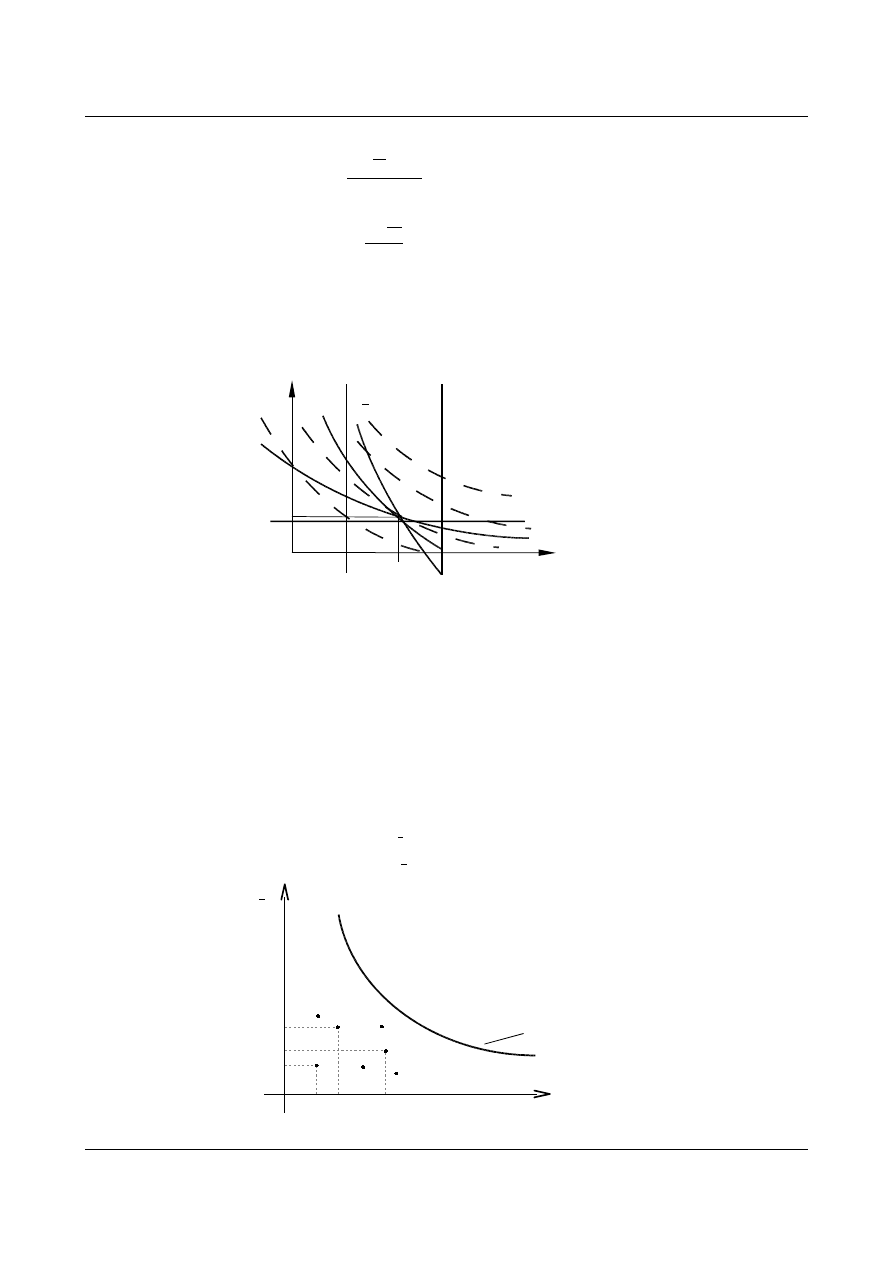
11.6. Przykład
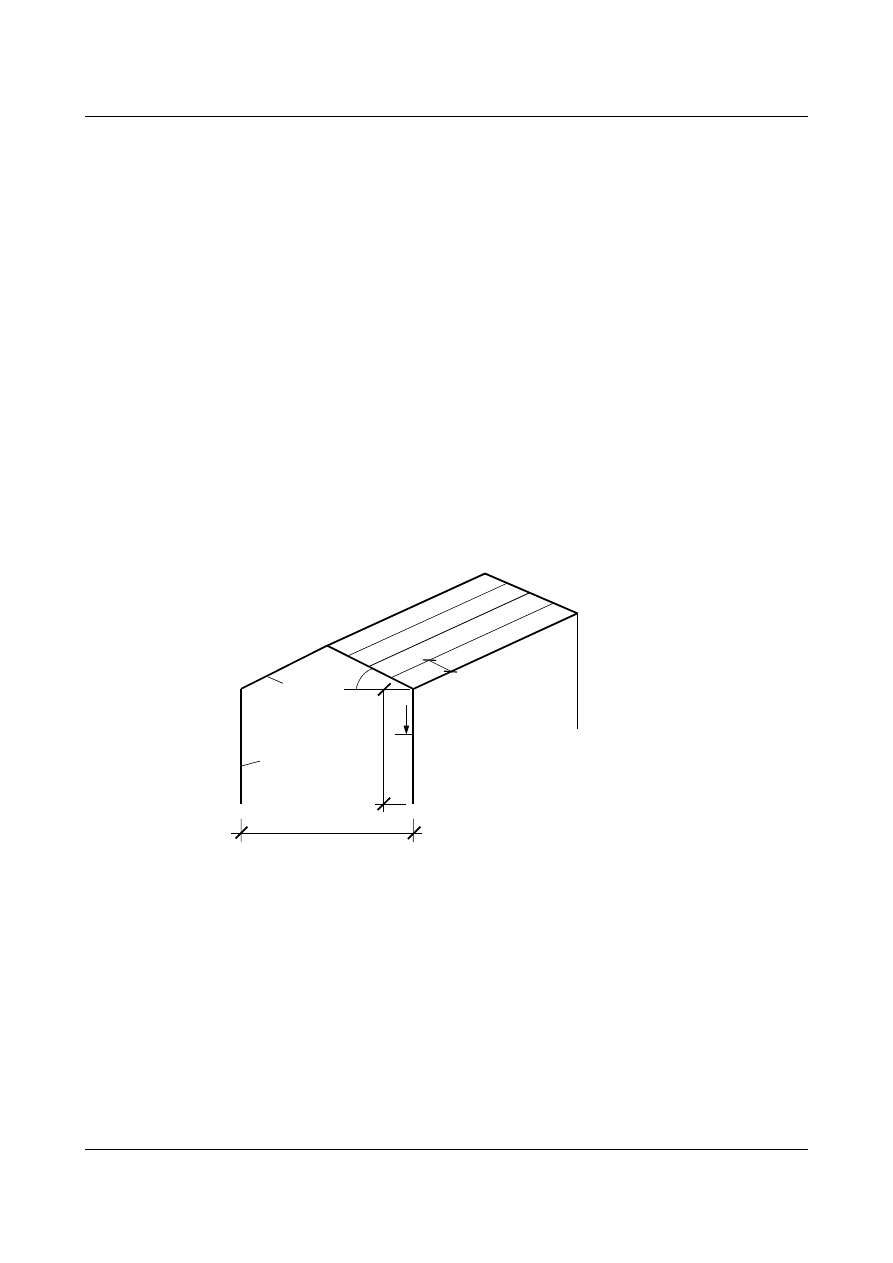
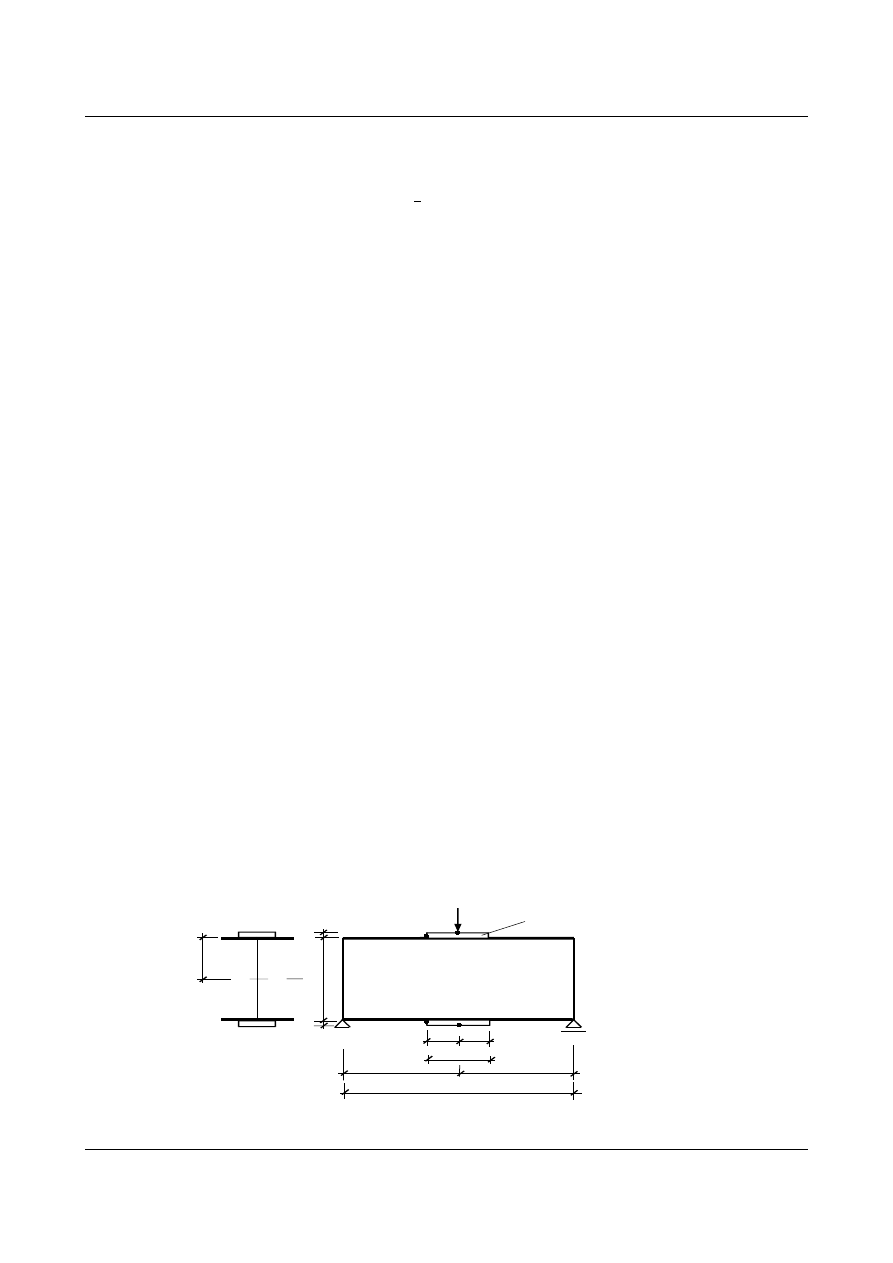
Dana jest belka swobodnie podparta,obciążona siłą skupioną P w połowie swej rozpietości. Pierwotny
przekrój dwuteowy jest niewstarczający ze względu na przekroczone naprężenia. W środkowej części
belki zaprojektować jako wzmocnienie przekroju optymalne nakładki.
g
2h
g
h
a
a
2a
1
2
nakładka
2l
l
l
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
11. OPTYMALIZACJA KONSTRUKCJI
4
1. Opisujące (O) :{ l,a,h,I,g,b,R,E } (wymiary,charakterystyka materiału)
2. Wymuszające (W) :{P} (obciążenia)
3. Reakcje (R) : {R
A
,M,T,u,ε,σ}
1. Przyjęcie funkcji celu.
Minimalizacja ilości zastosowanego materiału
V
=4⋅a⋅g⋅b min ze względu na a i g
(11.5)
2. Wybór zmiennej sterującej.
s
=
{
a , g
}
(11.6)
3. Wprowadzenie ograniczeń
g
≥g
min
(11.7)
1
≤R
2
≤R
(11.8)
u
2
≤u
dop
(11.9)
Rozwiązanie:
1
2
I
1
=I
(11.10)
I
2
=I 2⋅b⋅g⋅h
2
(11.11)
1
=
P
2
⋅
l
−a
⋅h
I
≤R
(11.12)
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
11. OPTYMALIZACJA KONSTRUKCJI
5
2
=
P
2
⋅l
I
2⋅b⋅g⋅h
2
⋅
h
g
≤R
(11.13)
∫
M
⋅M
E
⋅I
d
x
≤ f
dop
(11.14)
s
=
{
a
opt
, g
opt
}
(11.15)
g
a
g
min
σ
2
u
σ
1
F
1
F
2
l
a
opt
g
opt
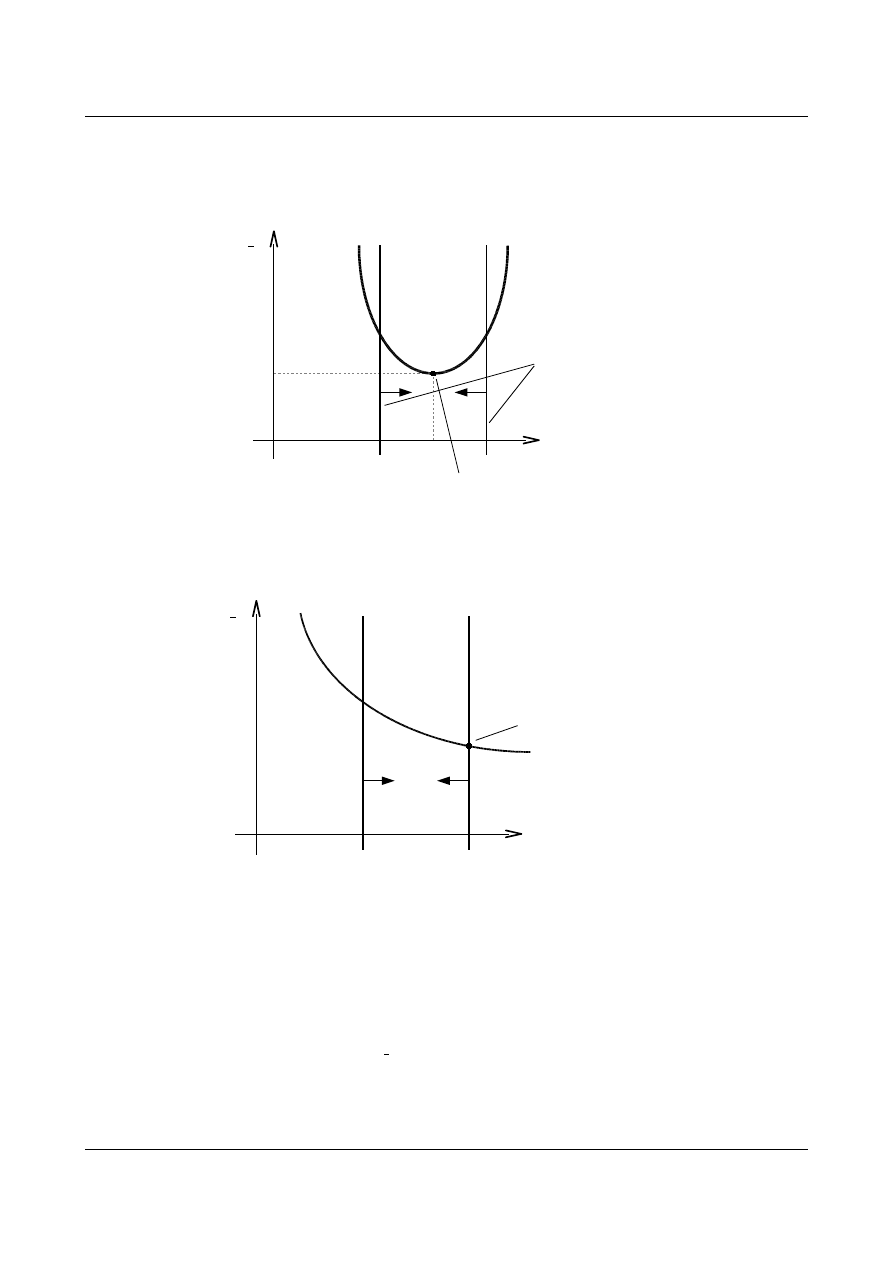
11.7. Funkcje celu
Optymalizacja polega na wybraniu najlepszego rozwiązania ze wszystkich możliwych.
Funkcje celu mogą być funkcjami liniowymi. Zmienne sterujące funkcji liniowych występują w
pierwszej potędze. Tego typu zagadnienia możemy bez problemów rozwiązać przy pomocy programów
komputerowych. Przykładowa funkcja celu:
f
... , s min
g
... , sg
gr
(11.16)
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
s
rozwiązania
dopuszczalne
rozwiązania
niedopuszczalne
linia ograniczeń
(s)
f
11. OPTYMALIZACJA KONSTRUKCJI
6
Funkcje celu mogą mieć także postać na przykład funkcji kwadratowych:
Rozwiązania optymalne bywają często blisko ograniczeń. W rozwiązaniach inżynierskich rozwiązanie
optymalne najczęściej znajduje się na ograniczeniu:
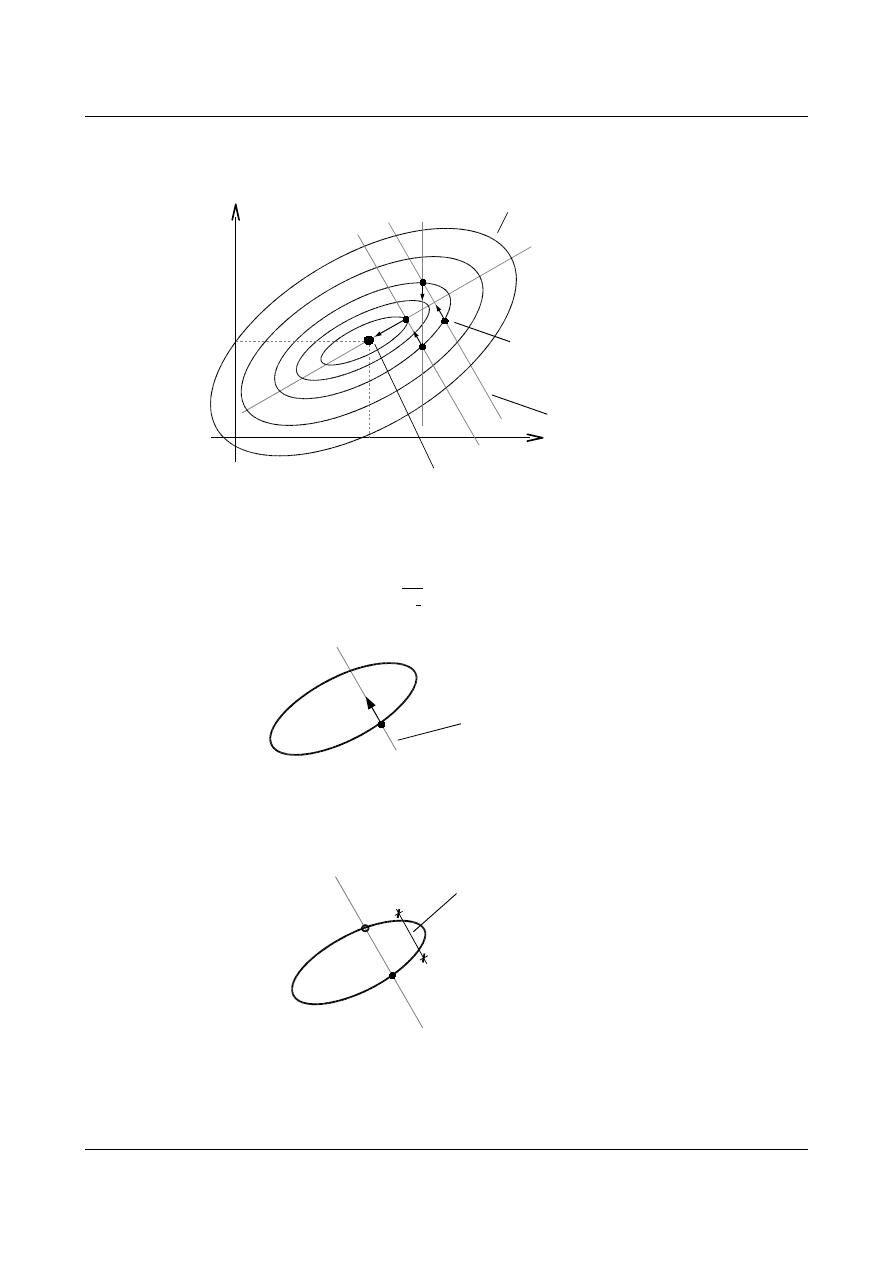
11.8. Obliczanie funkcjonału bez ograniczeń
Metody obliczania funkcjonału bez ograniczeń:
a) metoda gradientowa – jej przykładem może być twierdzenie o minimum całkowitej energii potencjalnej:
s=W −P
(11.17)
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
s
rozwiązanie optymalne, najlepsze z możliwych
linie ograniczeń
(s)
f
s
rozwiązanie
optymalne na
ograniczeniu
(s)
f
11. OPTYMALIZACJA KONSTRUKCJI
7
Wiemy, iż rozważany funkcjonał ma jedno ekstremum:
Szukanie wartości odbywa się w następujących etapach:
•
rozpoczynamy obierając gradient funkcji
f
s
:
•
wykonujemy krok:
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
szukanie wartości
izolinie
kierunek
największego
spadku – gradient
funkcji
jedno ekstremum, dla jednego zestawu
wartości funkcja minimalna
kierunek największego
spadku – gradient
funkcji
możemy wykonać
krok dowolnej
długości
11. OPTYMALIZACJA KONSTRUKCJI
8
•
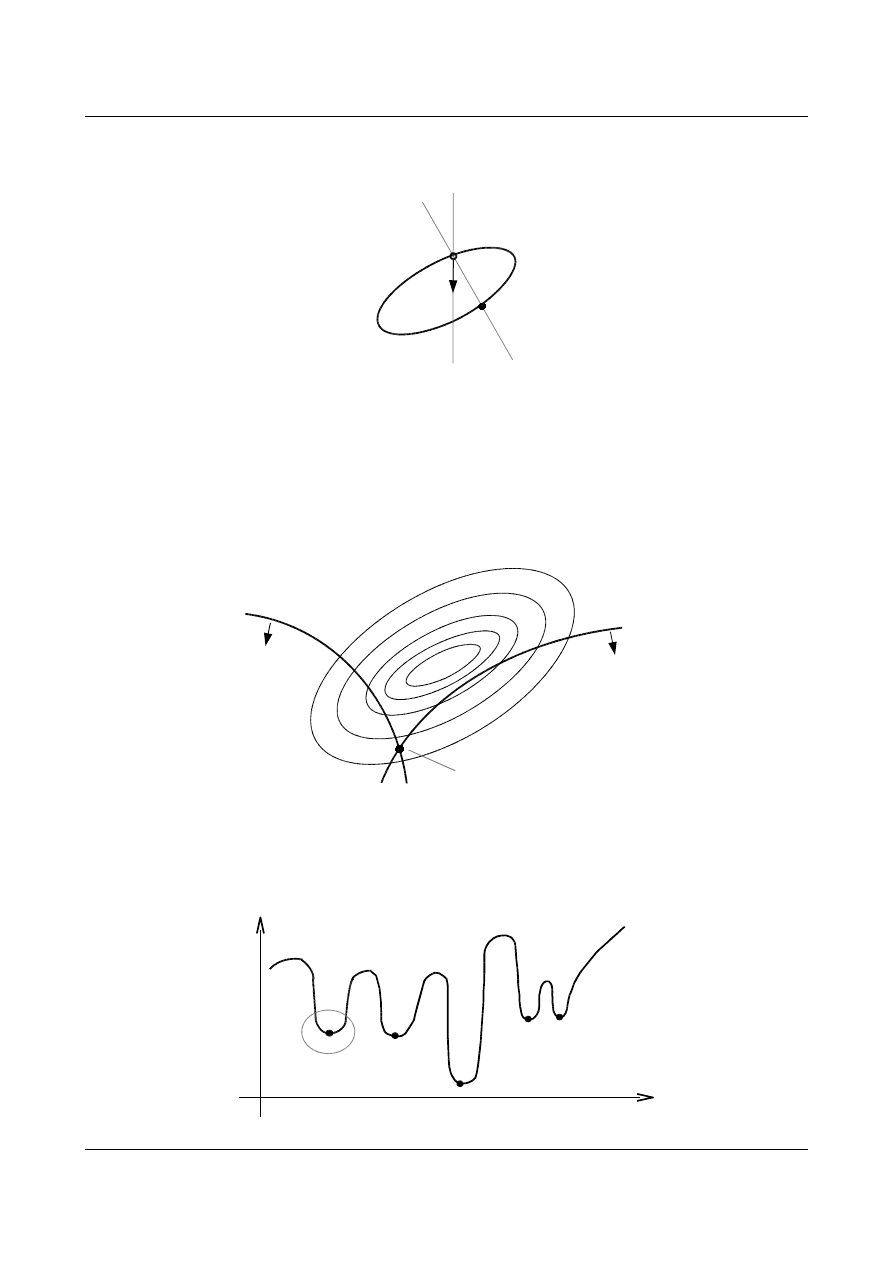
dostajemy kolejny kierunek gradientu:
Postępując dalej tym sposobem dochodzimy blisko do minimum. W omawianej metodzie można
policzyć gradienty analitycznie.
b) metoda bezgradientowa (metoda Powell'a).
Gradienty obliczamy numerycznie. Metodę bezgradientową stosujemy w sytuacjach, gdy nie
potrafimy obliczyć gradientu analitycznie.
W zadaniach inżynierskich występują ograniczenia:
Stosowane przez nas funkcje celu mogą być różnego kształtu:
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
rozwiązania
dopuszczalne
rozwiązanie najmniejsze z możliwych
przy danych ograniczeniach
rozwiązania
dopuszczalne
11. OPTYMALIZACJA KONSTRUKCJI
9
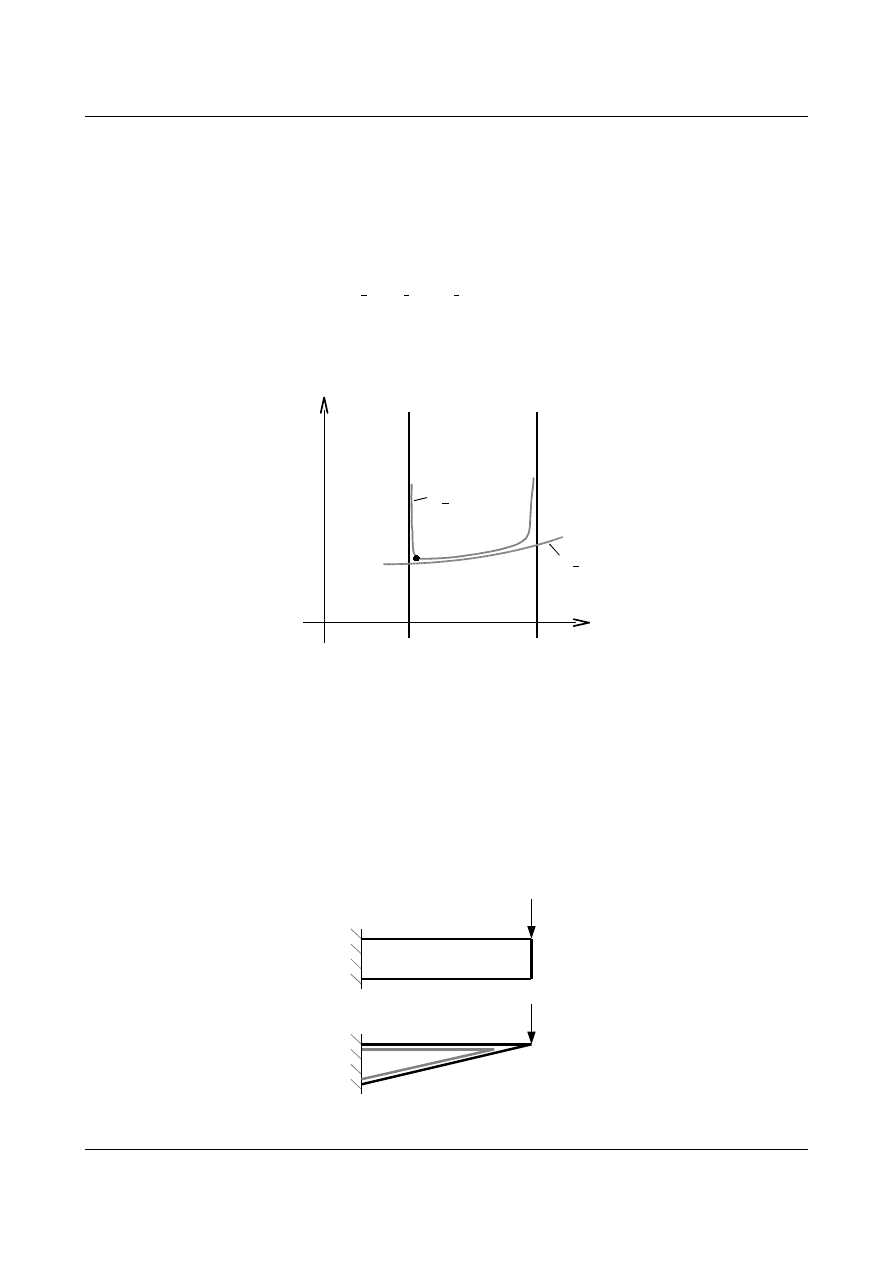
Często okazuje się, że znalezione minimum (zakreślone na rysunku) jest tylko minimum lokalnym.
Nas natomiast interesuje minimum globalne. Celem staje się zatem udowodnienie, że wyszukana wartość
jest ekstremum globalnym, a nie lokalnym.
W zadaniach inżynierskich wygodnie jest poruszać się po ograniczeniach, gdyż tam często znajduje
się oczekiwane rozwiązanie. Szukamy minimum funkcjonału
F
s= f s g s
(11.18)
Funkcjonał ten wyprofiluje nam rozwiązanie:
Zadanie optymalizacji jest zadaniem syntezy. Rozwiązujemy je wielokrotnie, zakładając określone
parametry, sprawdzając, dokonując analiz. Mając wiele rozwiązań możemy wybrać rozwiązanie optymalne.
11.9. Optymalizacja kształtu
Działanie to jest często stosowane w przypadku konstrukcji, dla których przy sprawdzaniu naprężeń
dochodzimy do wniosku, że pewna część elementu jest niewykorzystana. W takim wypadku możemy
zoptymalizować kształt:
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
(s)
f
(s)
F
Wyszukiwarka
Podobne podstrony:
Projekt optymalizacja konstrukcji
2001 11 Szkoła konstruktorów klasa II
2005 11 Szkoła konstruktorów klasa II
11 Obliczenie Konstrukcji Z Uwz Nieznany (2)
2003 11 Szkoła konstruktorów
optymalizacja konstrukcji
BUD OG projekt 11 Materiały konstrukcyjne Beton
2007 11 Szkola konstruktorowid Nieznany
Optymalizacja konstrukcji
Podstawy Optymalizacji Konstrukcji (opracowanie Ostwald)
11.Zadania konstr, zadania pkm
Projektowanie i optymalizacja konstrukcji sprężonych
2000 11 Szkoła konstruktorów
Projekt optymalizacja konstrukcji
więcej podobnych podstron