Automatyka,
sterowanie oraz
eksploatacja urządzeń
technicznych
Prowadzący : dr inż.Daniel Liberacki
SZCZEGÓŁOWY PROGRAM NAUCZANIA
Kierunek studiów: Inżynieria Środowiska
Specjalność: Ochrona i Kształtowania Środowiska
Cel nauczania
•
Zapoznanie
studentów
z
podstawowymi
pojęciami
z
zakresu
automatyki
oraz
zastosowaniem jej w sterowaniu urządzeniami i
systemami wodno- melioracyjnymi.
Szczególna uwaga będzie zwrócona na procesy
wykorzystania automatyzacji w systemach rozrządu
wody, automatyzacji budowli wodnych, pompowni
oraz zastosowaniu automatyzacji w nawodnieniach.
Treść nauczania
•
Zasadnicze pojęcia i określenia związane z automatyką.
•
Klasyfikacja układów automatyki. Podział układów
sterowania automatycznego.
•
Liniowe układy sterowania automatycznego. Sygnały
wejściowe i wyjściowe, sterujące sygnały zakłócające w
układach sterowania automatycznego.
•
Człony podstawowe układów sterowania automatycznego,
ich klasyfikacja oraz rodzaje połączeń.
• Typowe sygnały występujące w układach sterowania
automatycznego.
• Pojęcie transmitancji układu – funkcji przejścia (przepustowości).
• Transmitancja układu otwartego i zamkniętego.
• Pojęcia stabilności układów sterowania automatycznego.
• Warunek konieczny oraz dostateczny stabilności asymptotycznej
układów sterowania automatycznego.
• Badanie stabilności układów sterowania automatycznego.
.
• Pojęcie regulatora i jego rola w układach sterowania.
• Rodzaje regulatorów w układach zamkniętych
sterowania automatycznego.
• Regulatory proporcjonalne (typu P),
• Regulatory całkujące (typu I)).
• Prawo regulacji. Podstawowe właściwości regulatorów
o działaniu ciągłym.
• Regulatory cyfrowe.
Literatura
•
Chochowski A., Osianka E. (1990) :
Ćwiczenia laboratoryjne
z podstaw automatyki
. Wyd. SGGW, Warszawa
•
Urbaniak A. (1991) :
Automatyzacja w inżynierii sanitarnej.
Wyd. Politechnika Poznańska, Poznań
•
Mikulczyński T. (1998):
Podstawy automatyki
. Politechnika
Wrocławska.
•
Greblicki W. (2001) :
Teoretyczne podstawy automatyki
.
Politechnika Wrocławska.
•
KOWAL J. (2006) -
Podstawy Automatyki
- tom 1, UWND, Kraków;
•
KOWAL J. (2007) -
Podstawy Automatyki
- tom 2, UWND, Kraków;
•
Urbaniak A. (2007) – Podstawy automatyki. Wyd. Polit.
Poznańskiej.
POJĘCIA PODSTAWOWE
Początek temu, co dziś ogólnie nazywamy
automatyką
, dały
udane i praktycznie zrealizowane pomysły układów, dzięki którym
uzyskano samoczynną regulację, np. obrotów maszyn parowych,
napięć generatorów elektrycznych czy poziomów cieczy w
zbiornikach.
AUTOMATYKA – jest więc nauką techniczną która obejmuje
zarówno teorię jak i zasady konstrukcji oraz użytkowania urządzeń
automatycznych.
Natomiast
podstawy automatyki
to dyscyplina naukowa, która
porozrzucany w różnych działach techniki, dorobek, zebrała,
usystematyzowała i co najważniejsze, uogólniła, a przez to
radykalnie uprościła.
Umożliwiło to uzyskanie szerszego spojrzenia na zagadnienie
automatyzacji, a łącznie z rozwojem aparatury technicznej
zadecydowało o obecnym rozwoju automatyzacji procesów
jednostkowych,
czyli
tak
zwanej
automatyzacji
konwencjonalnej
.

Od automatyzacji prostych procesów jednostkowych, w którym
układy regulacji zastępują człowieka, w jego najprostszych
czynnościach nadzoru i kontroli, przeszło się do
automatyzacji
procesów
kompleksowych
,
polegającej
na
tym,
że
prace
poszczególnych regulatorów zainstalowanych w jakimś procesie
kompleksowym
zaczyna
się
podporządkowywać
układowi
centralnemu,
sterującemu
całością
złożonego
procesu
kompleksowego, według ustalonych kryteriów ekonomicznych,
technicznych czy ekonomiczno-technicznych.
Podstawy automatyki
– są więc odrębną
dyscypliną naukową o własnych specyficznych
pojęciach podstawowych.
Są to pojęcia o charakterze bardzo ogólnym,
wynikające ze specyfiki zakresu rozpatrywanych
zagadnień, a więc np.: sygnał, informacja,
przesyłanie sygnału, element układu automatyki
regulator, obiekt regulacji, proces kompleksowy.
Sygnałem – określamy w automatyce ogólnie
przebieg
dowolnej
wielkości
fizykalnej
występującej w procesie regulacji.
Jeżeli dwie wielkości fizykalne są jednoznacznie od
siebie zależne, to z przebiegu jednej z nich
możemy wynosić o przebiegu drugiej, czyli
inaczej mówiąc – jeden sygnał zawiera informacje
o drugim.
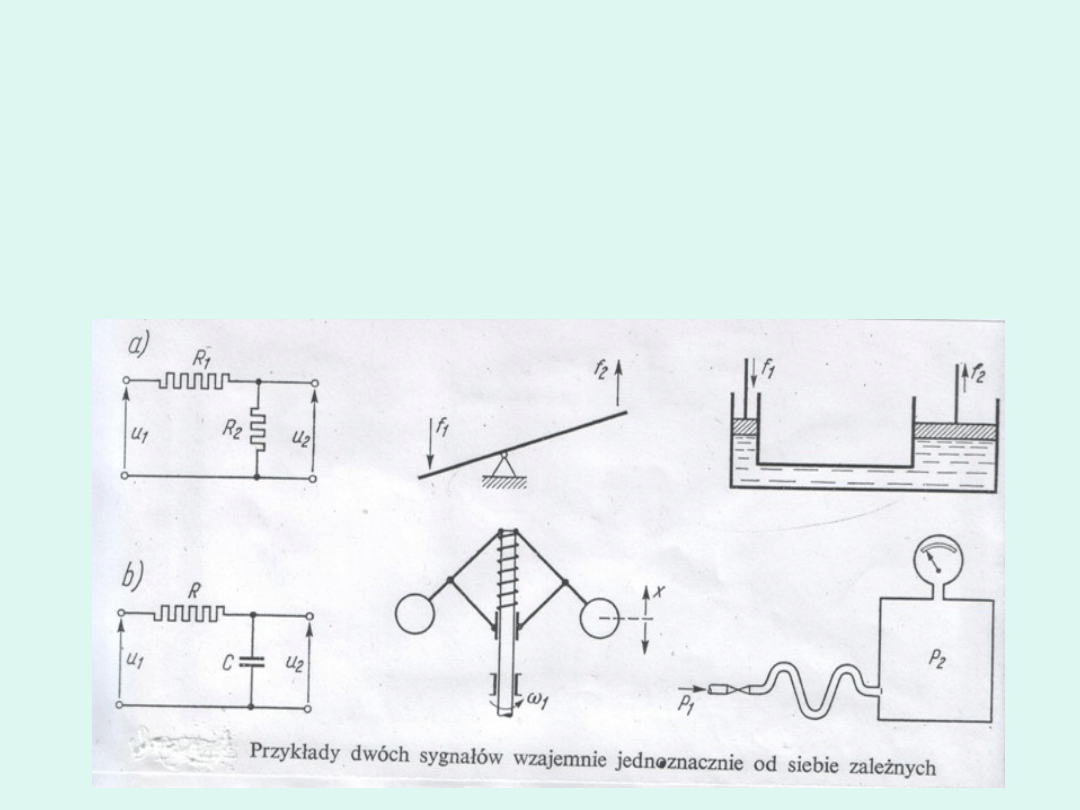
Przykłady kilku par sygnałów wzajemnie jednoznacznych od siebie
zależnych
Przy czym podzielono je na dwie grupy :
Grupa pierwsza to przypadki zależności proporcjonalnej.
u
2
= k·u
1
, f
2
= c·f
1
k i c – współczynniki o wartościach stałych niezależnych od
przebiegu sygnałów u
1
, f
1
Grupa druga to przypadki zależności bardziej skomplikowanej, którą
określa
równanie
różniczkowe
podające
zależność
sygnału
wyjściowego
od
sygnału
wejściowego.
W takich przypadkach przebieg sygnału wyjściowego nie jest
proporcjonalny do przebiegu sygnału wejściowego, lecz ulega on
pewnym
zmianom.
O wielkościach i rodzaju tych zmian decydują dynamiczne własności
układu, za pomocą, którego sygnał jest przesyłany czy też, jak
mówimy – przez który sygnał przechodzi.
Zadaniem regulacji jest uzyskanie pewnej z góry
przewidzianej
wartości
określonej
wielkości
fizycznej i podtrzymywanie jej, bądź realizowanie
z góry przewidzianego przebiegu tej wielkości.
Wielkość tę nazywamy wielkością (sygnałem)
regulowaną. Jest to więc wielkość, która
podlega regulacji w danym procesie (obiekcie).
Sygnał
to
abstrakcyjny
model
dowolnej
mierzalnej wielkości zmieniającej się w czasie,
generowanej przez zjawiska fizyczne lub systemy.
Tak jak wszystkie zjawiska może być opisany za
pomocą aparatu matematycznego, np. poprzez
podanie pewnej funkcji zależnej od czasu.
Ponieważ sygnał niesie informację o naturze
badanych zjawisk lub systemów, w niektórych
dziedzinach nauk jest on traktowany jak nośnik
informacji.
Sygnał oznacza zatem przepływ strumienia
informacji, przy czym przepływ może odbywać
się w jednym lub w wielu wymiarach.
Sygnały można przedstawić w postaci:
•analitycznej - za pomocą wzoru
matematycznego, który definiuje
funkcję
opisującą zmiany wartości sygnału np. w
dziedzinie
czasu
,
częstotliwości
itp.,
•graficznej - za pomocą
wykresu
lub
grafu
.
Każdy sygnał może być opisany przez jedną z
następujących wielkości:
•czas trwania, który może być ograniczony jakimś
przedziałem czasowym, formalnie przedstawionym
jako różnica pomiędzy końcem przedziału T2 i
początkiem przedziału T1,
•wartość
chwilową
sygnału,
mierzoną
w
jednostkach
właściwych dla danej wielkości,
•funkcję opisującą przebieg sygnału, przy czym
sygnał może być funkcją jednej
zmiennej
lub wielu
zmiennych niezależnych,
•specyficzne własności opisujące naturę danego
sygnału, takie jak:
amplituda
, częstotliwość,
energia
,
moc
,
okresowość
, itp.
Element układu automatyki
Jeżeli
przebiegi
wielkości
fizykalnych,
oznaczonych
indeksami
1
, zaczniemy zmieniać według dowolnej funkcji
x(t)
, gdzie
t
oznacza czas, to znając własności dynamiczne
poszczególnych układów możemy obliczyć przebiegi
odpowiadających im wielkości, oznaczonych indeksami
2
.
Przebiegi oznaczone indeksami 1 nazywamy
sygnałami
wejściowymi
umownie oznaczane symbolem
x
, natomiast
przebiegi oznaczone indeksem 2 nazwano
sygnałami
wyjściowymi
i oznacza się je umownie symbolem
y
.
Układ, w którym wyróżniamy sygnał wejściowy i
wyjściowy nazywamy
elementem
i
oznaczamy
w sposób umowny tak jak na rysunku .
Do wywołania sygnału x potrzebna jest pewna
energia na wejściu danego elementu. Energia
doprowadzona do ich wejścia jest większa od energii
otrzymywanej na wyjściu. Wynika to bezpośrednio z
ich konstrukcji (tarcie, opory) i zasady zachowania
energii.
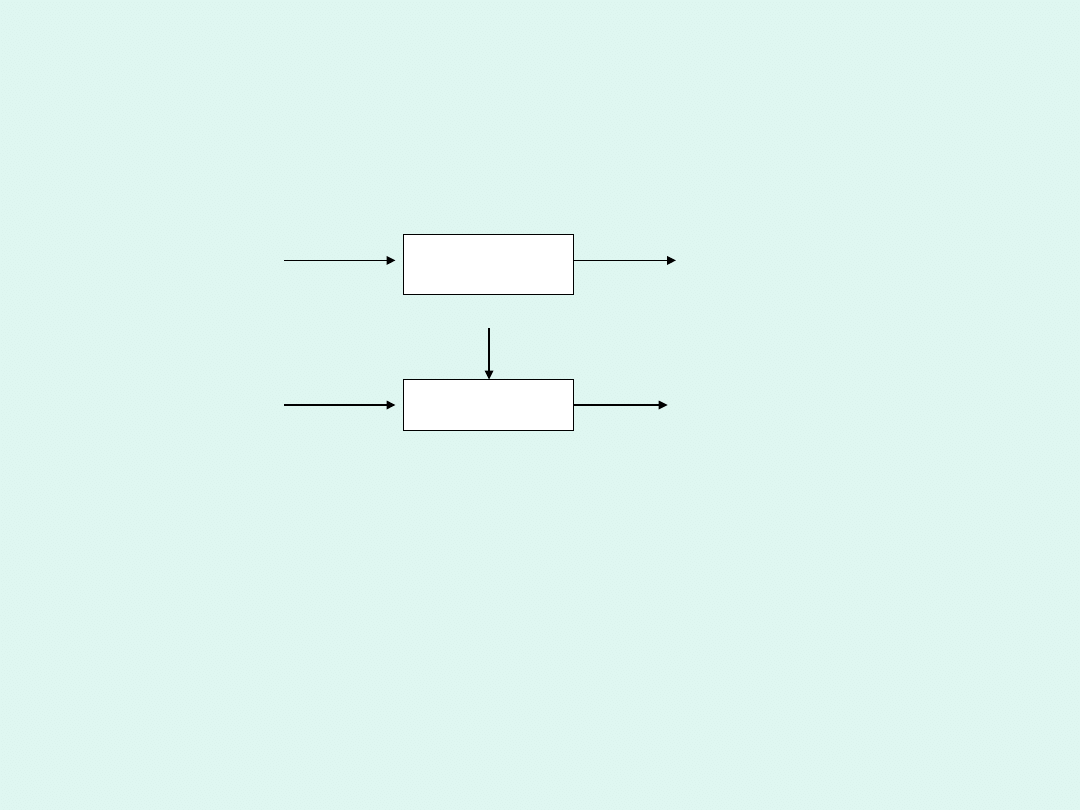
Taki element, w którym energia otrzymywana na wyjściu
jest większa od energii doprowadzanej do wejścia
nazywamy
elementem wzmacniającym
.
x
y
x
y
E
Aby energia otrzymywana na wyjściu była większa od
energii na wejściu, konieczne jest doprowadzenie energii
dodatkowej z zewnątrz.
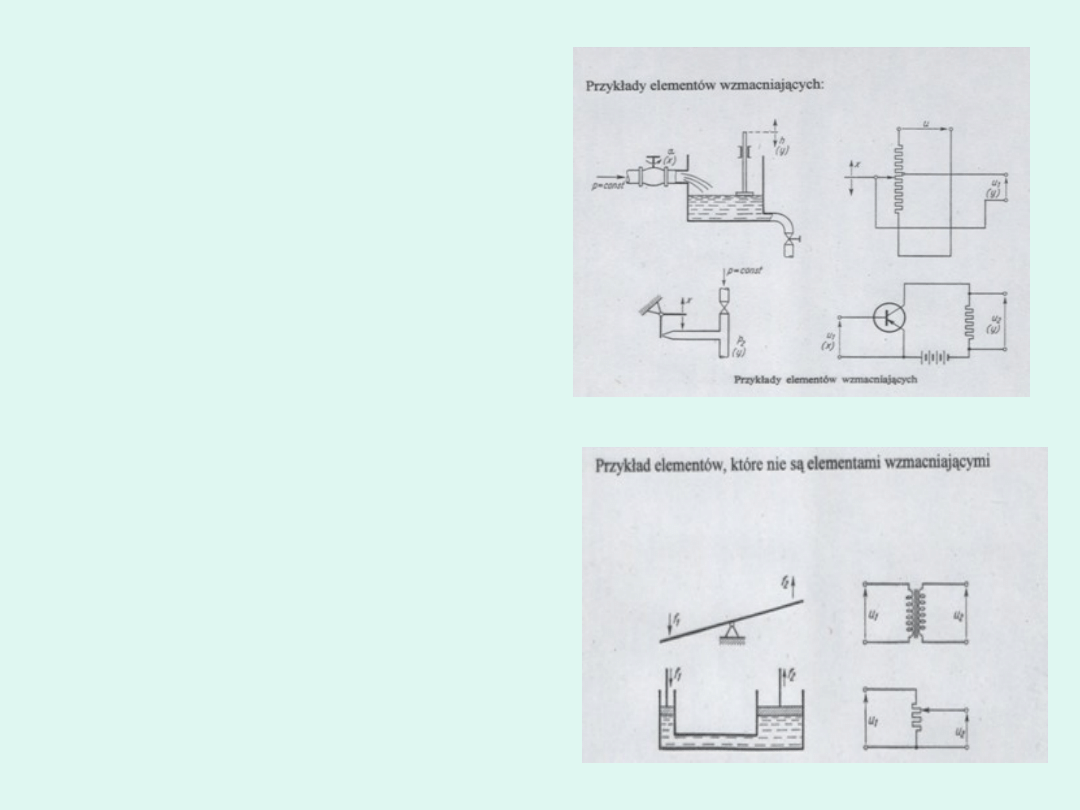
Przykłady
elementów
wzmacniających przedstawiono na
rysunku 1.
Symbole x i y w nawiasach wskazują,
który sygnał należy uważać za
wejściowy, a który za wyjściowy.
Na
rysunku
2.
przedstawiono
niektóre elementy, które nie są
elementami wzmacnianymi.
W
omawianych
dotychczas
elementach
wyróżniliśmy
jeden
sygnał wejściowy i jeden wyjściowy.
Są to przypadki najprostsze.
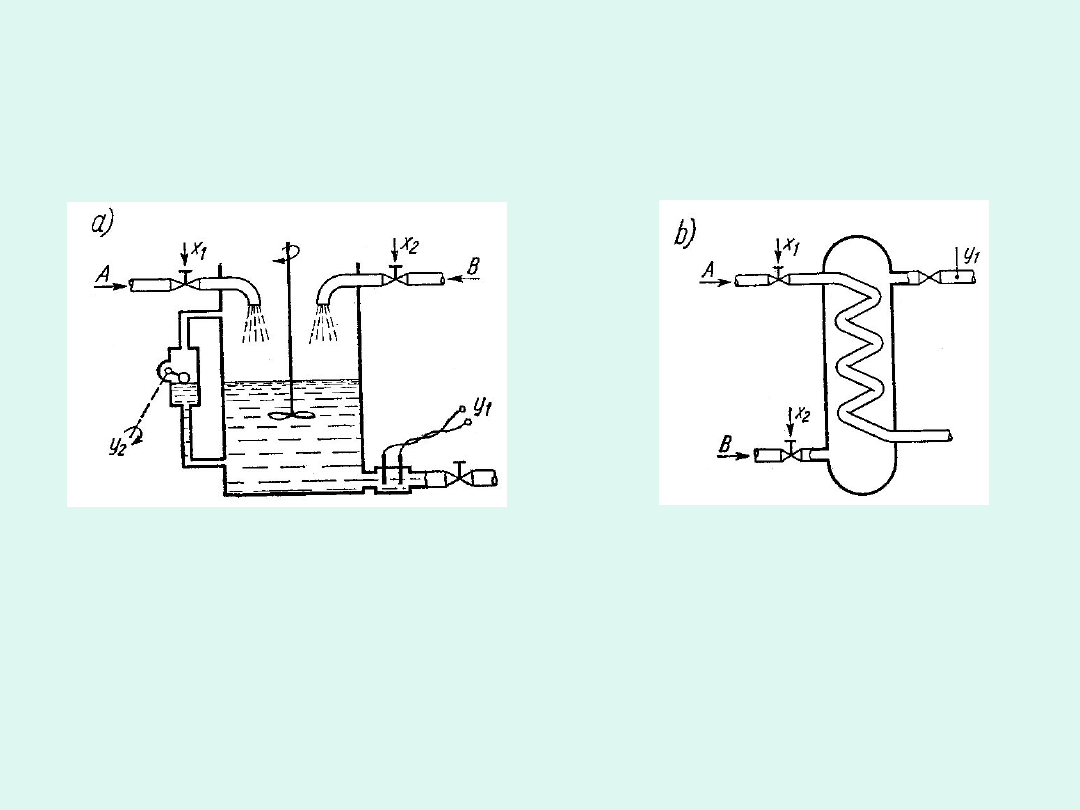
W praktyce spotykamy najczęściej elementy bardziej złożone, w których
występuje kilka sygnałów wejściowych i kilka wyjściowych. Przykłady takich
elementów przedstawiono na rysunku a i b
Liczba sygnałów wejściowych nie musi być równa liczbie sygnałów
wyjściowych. Dlatego liczbę sygnałów wejściowych oznaczono jako
n a liczbę sygnałów wyjściowych jako m. W większości przypadków
zachodzących w praktyce n = m. (schematy za Węgrzyn 1974)
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
Wyszukiwarka
Podobne podstrony:
WYKŁAD 2 UKŁADY STEROWANIA AUTOMATYCZNEGO (2013)
automatyka i sterowanie wyklad 15
automatyka i sterowanie wyklad Nieznany (8)
automatyka i sterowanie wyklad Nieznany (2)
automatyka i sterowanie wyklad 3
automatyka i sterowanie wyklad Nieznany (7)
automatyka i sterowanie wyklad Nieznany (14)
automatyka i sterowanie wyklad 16
automatyka i sterowanie wyklad Nieznany (12)
automatyka i sterowanie wyklad Nieznany (16)
automatyka i sterowanie wyklad Nieznany (5)
automatyka i sterowanie wyklad 9
wykład 12 Urządzenia wyjściowe w komputerowych układach sterowania (2013)
automatyka i sterowanie wyklad 11
Egzamin zad automatyka, polibuda, 4 semestr, automatyka i sterowanie(kolokwaia, teoria, zadania, mat
automatyka i sterowanie wyklad 4
automatyka i sterowanie wyklad 5
wykład 11 Urządzenia wejściowe w komputerowych układach sterowania (2013)
automatyka i sterowanie wyklad Nieznany (10)
więcej podobnych podstron