UKŁADY STEROWANIA AUTOMATYCZNEGO
USA
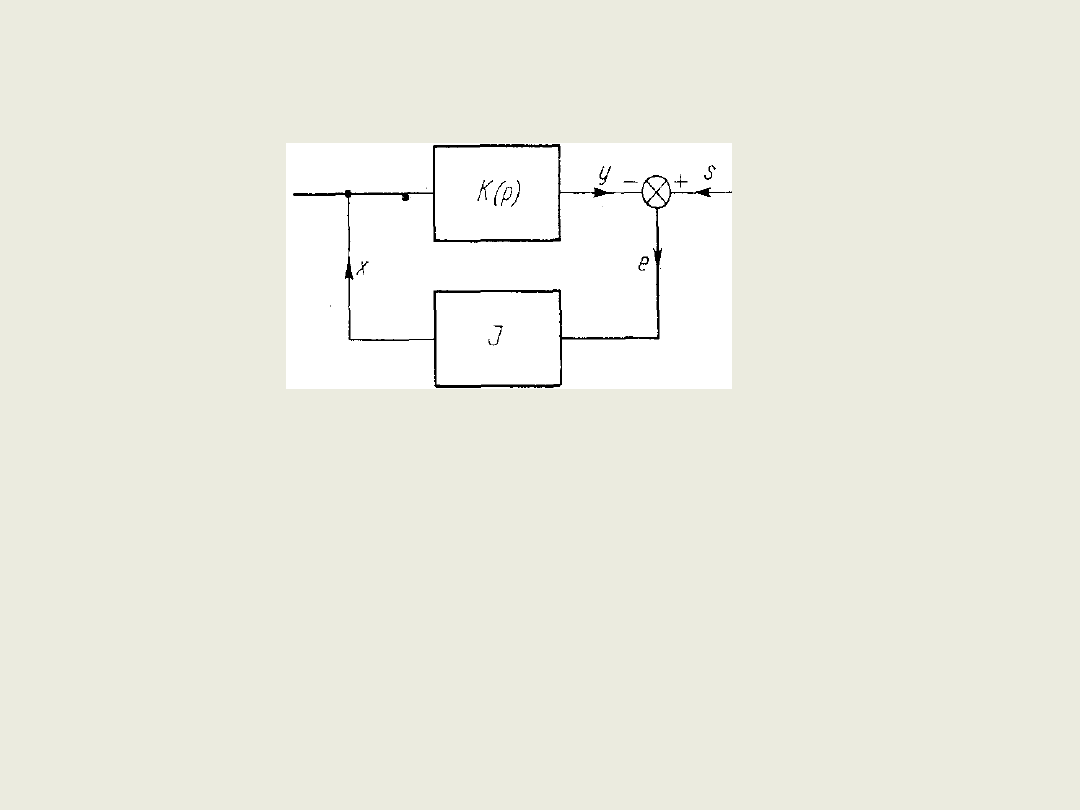
Układ automatyki konwencjonalnej
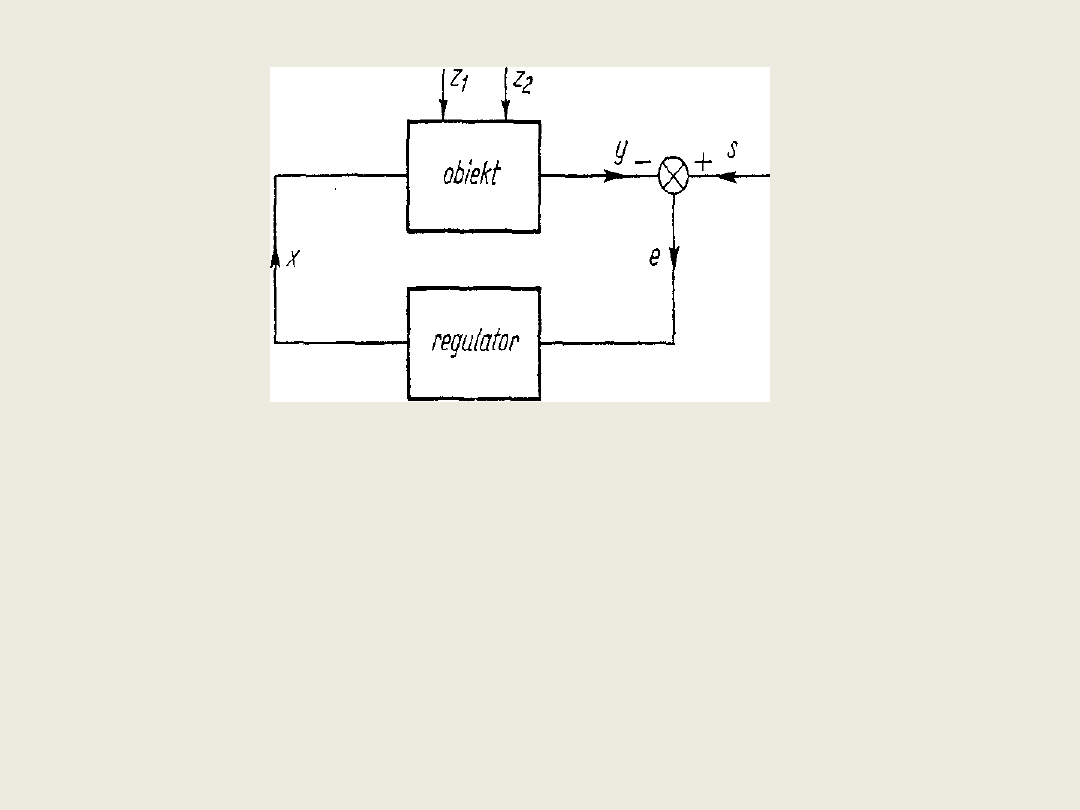
Najprostszy układ automatyki konwencjonalnej
(regulacji automatycznej) można przedstawić za
pomocą omówionej poprzednio symboliki tak, jak to
pokazano na rys.1.
Rys.
1.
Schemat
ideowy
najprostszego
układu
sterowania
automatycznego
W obiekcie wyróżniamy następujące sygnały
:
•sygnał regulowany
y
lub — jak inaczej będziemy mówić — zmienna regulowana
y,
•sygnał regulujący
x
,
•sygnały zakłócające
z
1
, z
2
.

Sygnał regulowany
y
to ten, który mimo zmiennych z
zewnątrz warunków pracy obiektu, czyli — jak mówimy —
mimo przychodzących sygnałów zakłócających ma być
utrzymywany w wartości stałej lub zmieniać się według
określonej funkcji wyznaczonej sygnałem
s,
zwanym
sygnałem sterującym
.

Porównanie sygnału regulowanego i sygnału
sterującego
dokonuje
się
w
tzw.
węźle
sumacyjnym.
Otrzymana tam różnica
s — y,
czyli
tzw.
sygnał błędu
, który będziemy oznaczać
symbolem
e
(uchyb
regulacji)
,
zostaje
wprowadzona
na
wejście
elementu
wzmacniającego, zwanego
regulatorem.
Regulatorem
nazywamy układ, którego zadaniem jest
zmienianie sygnału wejściowego obiektu najmniej tak, aby
sygnał błędu był jak najmniejszy, czyli aby sygnał regulowany
najmniej różnił się jak najmniej od sygnału sterującego
s
.
Regulator
niekoniecznie
musi
być
elementem
wzmacniającym. Może nim nie być wówczas, gdy sam obiekt
ma charakter elementu wzmacniającego.
Dla
pracy
zamkniętego
układu
automatyki
konieczne jest bowiem, aby co najmniej jeden z
występujących w tym układzie elementów był
elementem wzmacniającym. Jest to oczywiste z
energetycznego punktu widzenia.
W olbrzymiej większości przypadków zachodzących
w praktyce,
elementami wzmacniającymi
w
układach automatyki są regulatory.
Praca układu regulacji automatycznej może być
słownie opisana w ten sposób: wywołana
zakłóceniami
z
1
, z
2
zmiana sygnału regulowanego
y
powoduje powstanie sygnału błędu
e.
Sygnał błędu
e
, wprowadzony na wejście
regulatora, powoduje powstanie na jego wyjściu
sygnału
x,
który będąc jednocześnie sygnałem
wejściowym dla obiektu powoduje zmianę sygnału
regulowanego
y
tak, aby różnica
y — s
była jak
najmniejsza.
Układ regulacji automatycznej tworzy więc układ
zamknięty, pracujący na zasadzie tzw
.
sprzężenia
zwrotnego
.
W automatyce wszelkie spotykane układy – noszą nazwę
U S A
–
Układów Sterowania Automatycznego
.
Klasyfikację układów regulacji automatycznej można
przeprowadzić na różne sposoby, biorąc pod uwagę rozmaite
czynniki, które mają o niej decydować:
U S A
U S A
ZWYKŁE ROZGRYWAJĄCE ADAPTACYJNE
ZWYKŁE ROZGRYWAJĄCE ADAPTACYJNE
Układy Zwykłe
dzielimy na:
• Otwarte
• Zamknięte
• Kombinowane
Sterowanie u w
układzie otwartym
polega na
nastawianiu wielkości wejściowej x, aby znając
charakterystykę obiektu sterowania OS otrzymać
na wyjściu pożądaną wartość y.
Jest to układ, w którym na regulator nie
oddziaływują wielkości związane z obiektem
sterowania. W analizie tych układów często
uwzględnia się zakłócenia z.
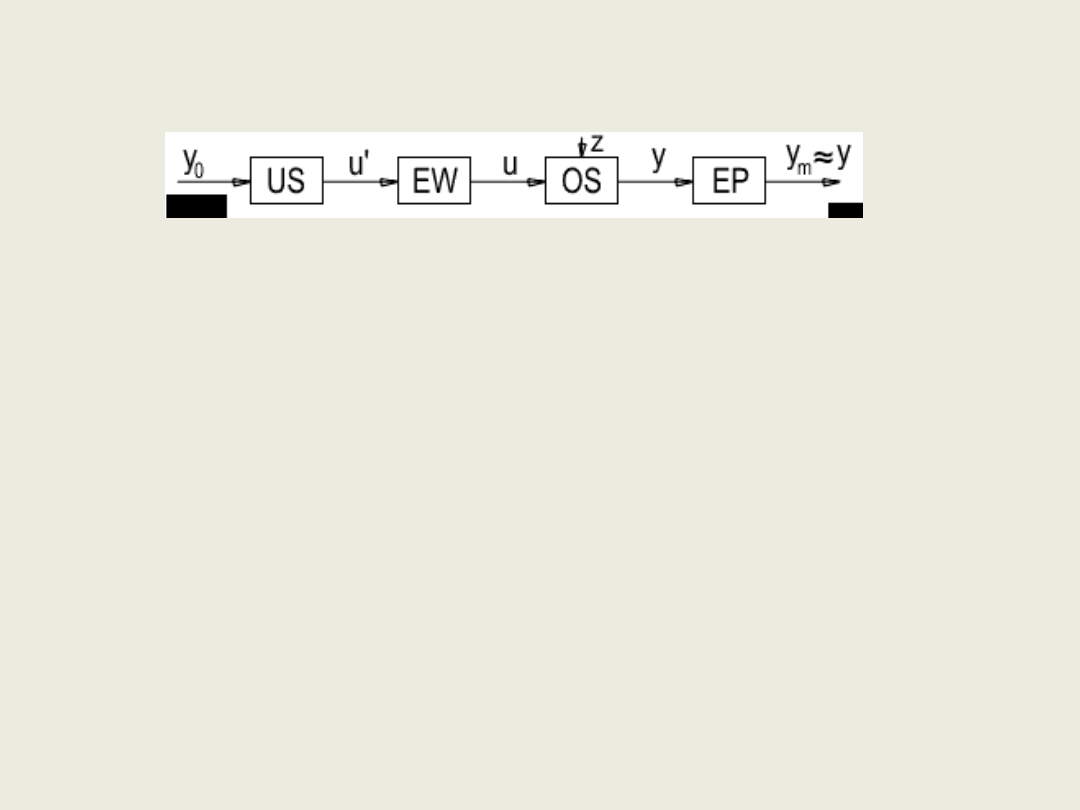
US - urządzenie sterujące EW - element
wykonawczy
OS - obiekt sterowania EP – element pomiarowy
y
0
- wielkość zadana u' - sygnał sterujący na
wyjściu
u - sygnał sterujący z – zakłócenia
y – wielkość sterowana
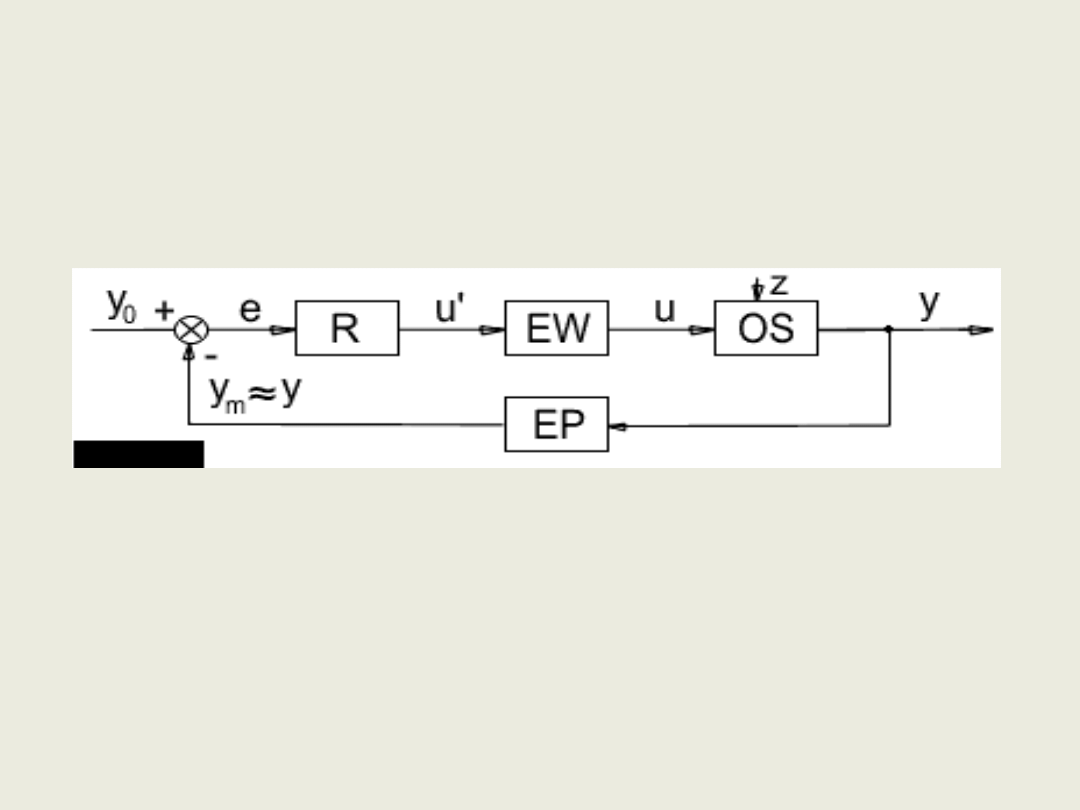
Zamknięty układ sterowania (układ regulacji
automatycznej) – układ w którym na sygnał sterujący
obiekt u ma wpływ sygnał wyjściowy y.
R – regulator EW - element
wykonawczy
OS - obiekt sterowania EP – element
pomiarowy
y
0
- wielkość zadana u' - sygnał sterujący
na wyjściu R
u - sygnał sterujący z - zakłócenia
y - wielkość regulowana e – uchyb regulacji e =
y
0
- y
m
y
m
- wielkość regulowana pomierzona przez EP
Klasyfikacja układów regulacji
automatycznej
A. Ze względu na zadanie, jakie spełnia dany układ:
• Układy stabilizacji automatycznej,
• Układy sterowania sekwencyjnego,
• Układy śledzące,
• Układy regulacji programowej,
• Układy regulacji optymalnej (ekstremalnej).
B.
Ze względu na liczbę parametrów regulowanych
jednocześnie w tym samym obiekcie:
•Układy regulacji jednej zmiennej
•Układy regulacji wielu zmiennych
C.
Ze względu na rodzaj elementów, z jakich składa się układ:
•Układy liniowe
•Układy nieliniowe
lub inny ogólny podział:
•Układy regulacji ciągłej
•Układy regulacji przerywanej
D
. Ze względu na sposób pomiaru wielkości regulowanej:
•Układy analogowe
•Układy cyfrowe
A Podział układów regulacji automatycznej ze względu na
zadanie, jakie spełnia dany układ:
Układy stabilizacji automatycznej
– sygnał sterujący ma
stałą, raz nastawioną wartość,
s = const
.
W procesie regulacji
układ ma za zadanie utrzymać stała wartość sygnału
regulowanego
y
równą
s
.
Przykład: układ regulacji automatycznej napięcia generatora,
układ regulacji automatycznej temperatury pary
podgrzewanej w kotłach parowych.
Układy śledzące
– sygnał sterujący
s
jest nieznaną funkcją
czasu. Zmiany
s
nie zależą od procesu zachodzącego
wewnątrz układu regulacji automatycznej, ale są wywołane
zjawiskami występującymi zewnątrz układu. W procesie
regulacji sygnał regulowany
y
śledzi zmiany sygnału
sterującego
s
. (są to tzw.
układy nadążne
).
Przykład: radarowe układy nadążne artylerii przeciwlotniczej.
Układy
sterowania
sekwencyjnego
–
ich
zadaniem jest zapewnienie wykonania składowych
operacji procesu technologicznego w określonej
kolejności.
Sterowanie sprowadza się do załączania i wyłączania
poszczególnych urządzeń procesu i realizowane jest
najczęściej przez układy przełączające.
• Układy regulacji programowej
– są szczególnym przypadkiem
układów śledzących. O regulacji programowej mówimy wówczas, gdy
sygnał sterujący jest znana, z góry określoną funkcją czasu
s(t)
, czyli
zmienia się według pewnego programu.
Przykład : układy regulacji automatycznej obrabiarek, wykonujących jakiś
element o z góry określonym profilu.
• Układy regulacji optymalnej (ekstremalnej )–
Regulację
ekstremalną stosuje się wówczas, gdy charakterystyka statyczna obiektu
jest krzywa ekstremalną (posiada maksimum względnie minimum).
Może się zdarzyć, że położenie tego ekstremum ulega przesuwaniu w
zależności od wartości pewnych sygnałów zakłócających.
Zadaniem układów regulacji ekstremalnej jest utrzymywanie wielkości
regulowanej y stale na wartości maksymalnej.
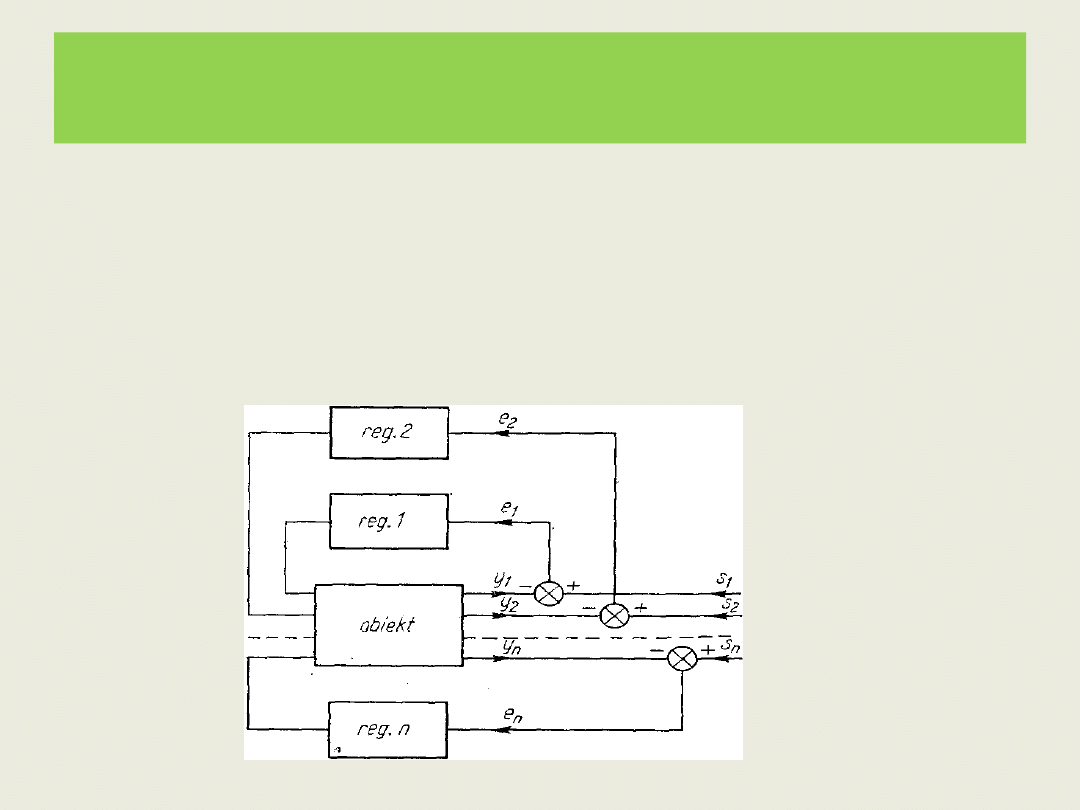
B. Podział układów regulacji automatycznej ze względu na
liczbę parametrów regulowanych jednocześnie w tym samym
obiekcie:
W zautomatyzowanych obiektach przemysłowych liczba sygnałów
wyjściowych (regulujących) jest najczęściej równa liczbie sygnałów
wejściowych (sygnałów regulowanych). W takich przypadkach automatyzację
można rozwiązać przez zastosowanie regulatorów jednowejściowych i
jednowyjściowych.
Istotną cechą regulacji wielu zmiennych jest to, że tylko w pewnych
specjalnych przypadkach każdy z obwodów regulacji poszczególnych
zmiennych można rozpatrywać niezależnie, pomijając wpływy innych
obwodów.
Na ogół zachodzi jednak konieczność uwzględnienia wzajemnego
oddziaływania między obwodami. Stanowi to właśnie o specyfice układów
regulacji wielu zmiennych i decyduje o wprowadzeniu do ich analizy nieco
szerszego aparatu matematycznego (rachunek macierzowy) i nieco
ogólniejszych pojęć (macierzowa funkcja przejścia) niż te, które są
stosowane w analizie układów o jednej zmiennej regulowanej.
C. Podział układów regulacji automatycznej ze względu na
rodzaj występujących w nich elementów.
Najbardziej ogólnym podziałem układów regulacji automatycznej ze względu na
rodzaj występujących w nich elementów jest podział na układy liniowe i nieliniowe.
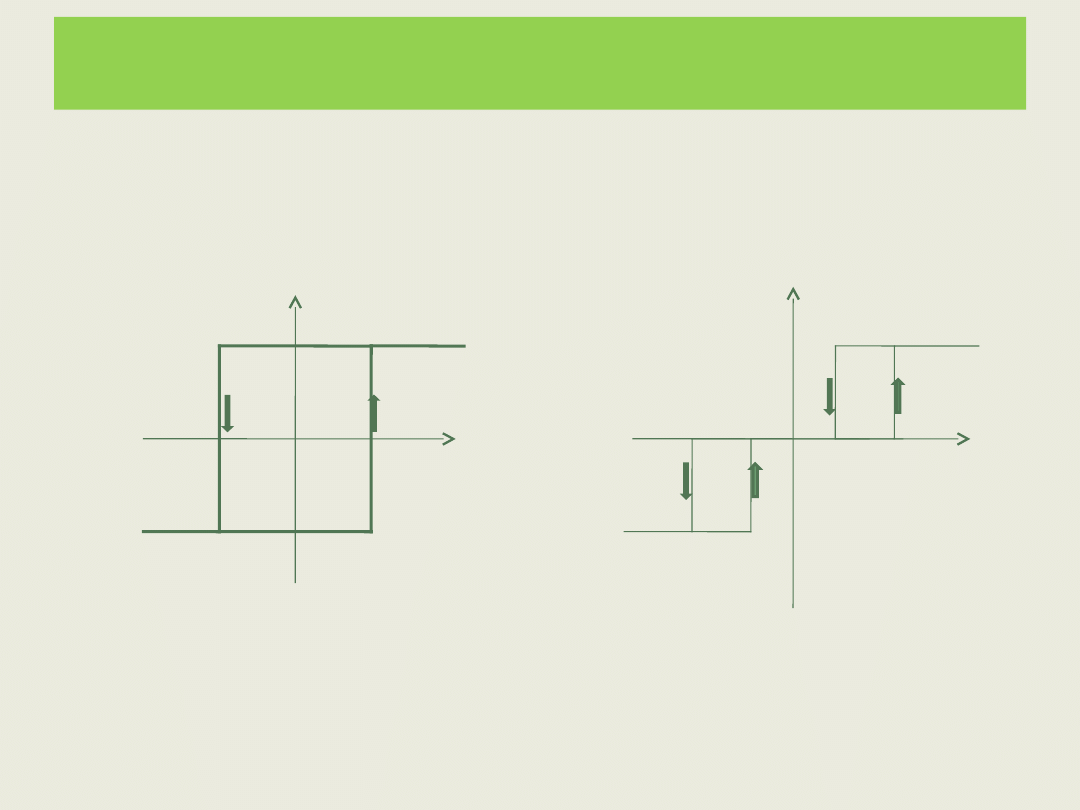
y
x
y
x
Charakterystyka elementu dwupołożeniowego Charakterystyka
elementu trójpołożeniowego
Układami liniowymi
są takie układy, których wszystkie elementy
spełniają
zasadę superpozycji
, tzn. są liniowe. Jeżeli chociaż jeden
z elementów układu jest elementem nieliniowym, to cały układ nie
spełnia zasady superpozycji, a więc jest
układem nieliniowym
.
W układach regulacji nieliniowej wyróżniamy układy regulacji
dwu-
i
trójpołożeniowej
, jako najczęściej, spotykane w praktyce. Cechuje
je obecność elementów o charakterystykach pokazanych na
rysunku powyżej.
Innym, bardzo ogólnym podziałem, jest podział układów regulacji
automatycznej na układy regulacji
ciągłej
i układy regulacji
nieciągłej
, czyli
przerywanej
(
impulsowej
).
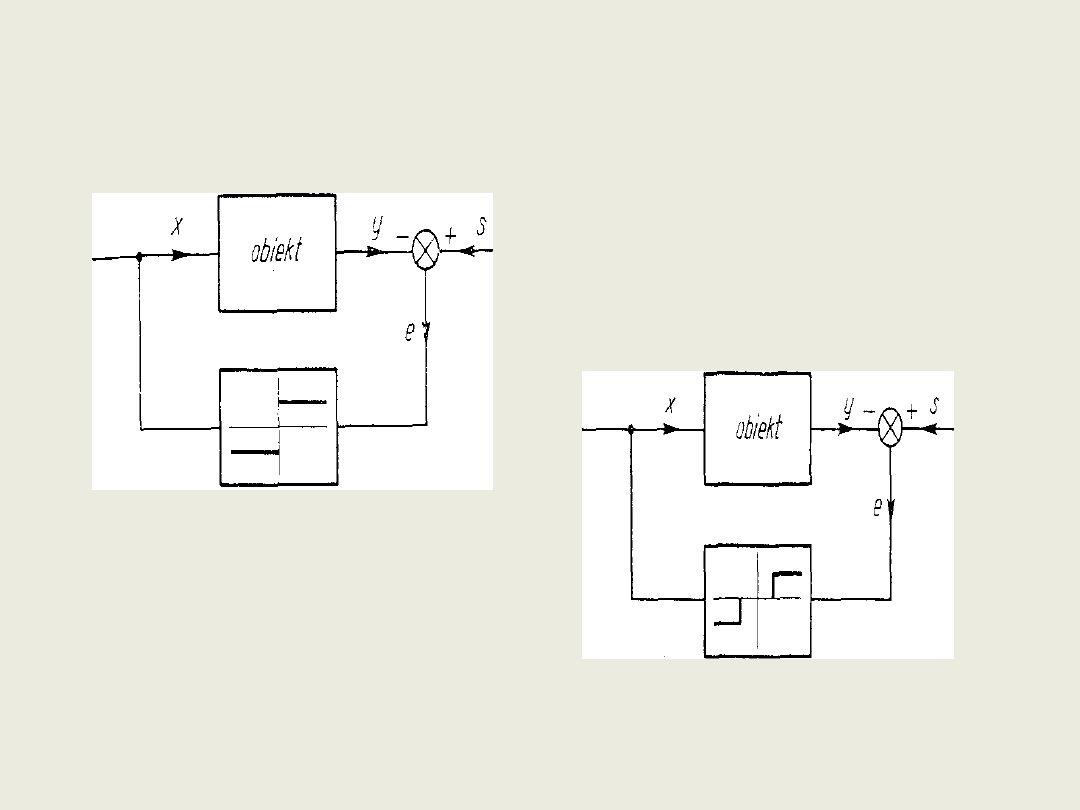
Schemat blokowy układu regulacji dwupołożeniowej i trójpołożeniowej
Istotną cechą regulacji impulsowej jest obecność impulsatora w
głównym obwodzie przenoszenia sygnałów, tak jak to pokazano na
rysunku poniżej
Zadaniem impulsatora jest przekształcenie ciągłego przebiegu
e(t)
na ciąg impulsów
x
. Układy regulacji impulsowej znajdują częste
zastosowanie w automatyce przemysłowej i w tych wszystkich
zagadnieniach, w których zachodzi konieczność przesyłania
sygnałów na duże odległości.
Schemat blokowy układu regulacji impulsowej
D. Podział układów regulacji automatycznej ze względu na
sposób pomiaru wielkości regulowanej (układy analogowe i
cyfrowe)
Istotą układów cyfrowych, odróżniającą je od pozostałych
układów — analogowych, jest sposób prowadzenia pomiaru
zmiennej regulowanej.
W
układach
analogowych
wynik
pomiaru
jest
przedstawiony w postaci wielkości fizykalnej, związanej z
wielkością regulowaną określoną zależnością funkcyjną,
(np. wysokość słupa rtęci proporcjonalna do ciśnienia lub
napięcia potencjometru proporcjonalne do kąta skręcenia
jego osi).
W układach cyfrowych zakres zmian wielkości regulowanej
dzieli się na odpowiednio dużą ilość części i każdej
przyporządkowuje kolejno odpowiednią liczbę, np. od l do
100.
Sygnałem regulowanym są wtedy liczby, które porównuje się
z liczbami reprezentującymi sygnał sterujący.
Węzeł sumacyjny ma, więc w takim przypadku charakter,
bardzo
prostego,
elementu
maszyny
matematycznej,
dokonującego porównania dwóch liczb przekazującego wynik
pomiaru regulatorowi.
Ten wynik, który jest również liczbą, przed wprowadzeniem
na regulator przekształca się na sygnał o przebiegu ciągłym
(analogowym).
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
Wyszukiwarka
Podobne podstrony:
12 Podstawy automatyki Układy sterowania logicznego
Wykład 6 Stabilność liniowych układów automatyki (2013)
Projekt 2 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Projekt 1 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Wykład 5 Układy ze sprzężeniem zwrotnym (2013)
sprawko robotyka, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Projekt3, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt góra, R
projekt1hubert, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt g
projekt 1 hubert, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Wykład 4 Klasyfikacja i podział elementów układów automatyki (2013)
12 Podstawy automatyki Układy sterowania logicznego
Wykład 6 Stabilność liniowych układów automatyki (2013)
WYKŁAD 02 SterowCyfrowe
Logika wykład II - 20.10.2013, Sem. 1, Logika
KPC Wykład (22) 09 04 2013
KPC Wykład (17) 26 02 2013
Politechnika Białostocka 03 Układy sterowania umożliwiające zmianę parametrów ruchu tłoka
więcej podobnych podstron