
dr inż. kpt.ż.w Zbigniew M. FERLAS
Zakład Ratownictwa i Ochrony Żeglugi
mgr inż. st.of pokł Jadwiga GRZESZAK
Zakład Nawigacji Morskiej
TEMATYKA WYKŁADU :
Pomiar prędkości i przebytej drogi
Pomiar prędkości i odległości przebytej po wodzie
wykonywany jest na statkach za pomocą odpowiednich
metod empirycznych lub różnego typu logów. Większość
z nich mierzy drogę i prędkość statku po wodzie.
Jedynie logi dopplerowskie (hydroakustyczne), przy
głębokościach do 600 m mierzą prędkości i odległości
nad dnem.
Odbiorniki systemów satelitarnych (GPS, DGPS) obliczają
prędkość i drogę przebytą nad dnem.
Pomiar prędkości i przebytej drogi
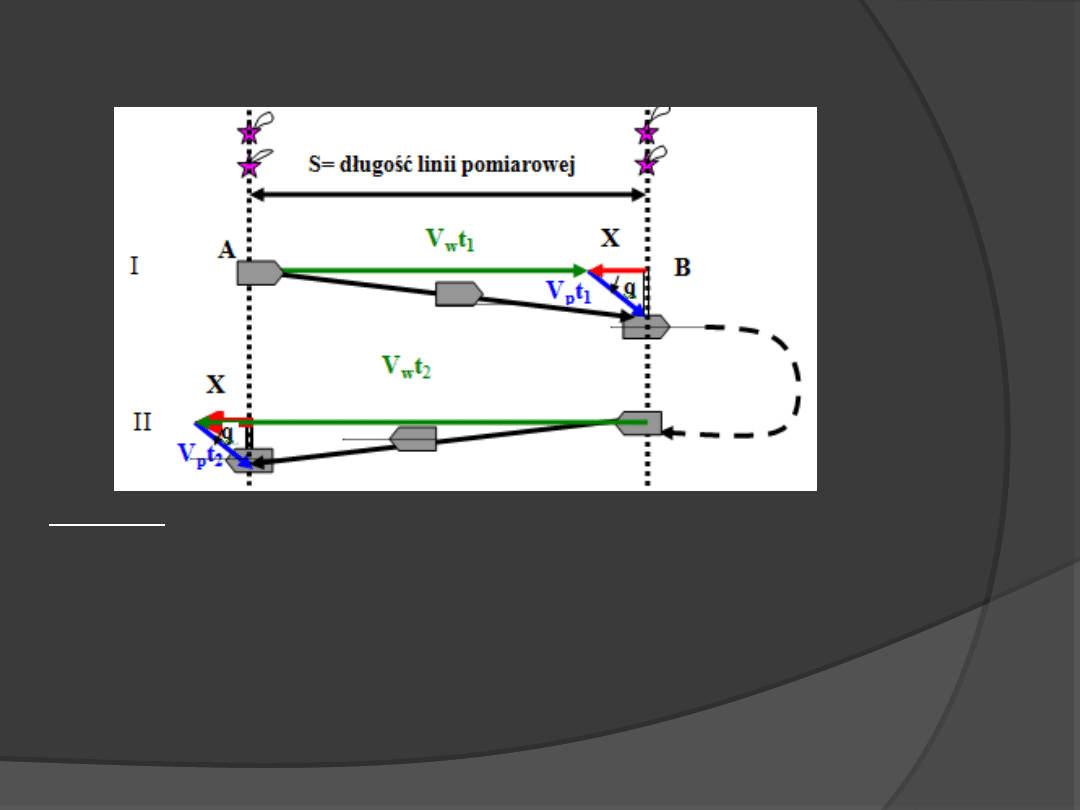
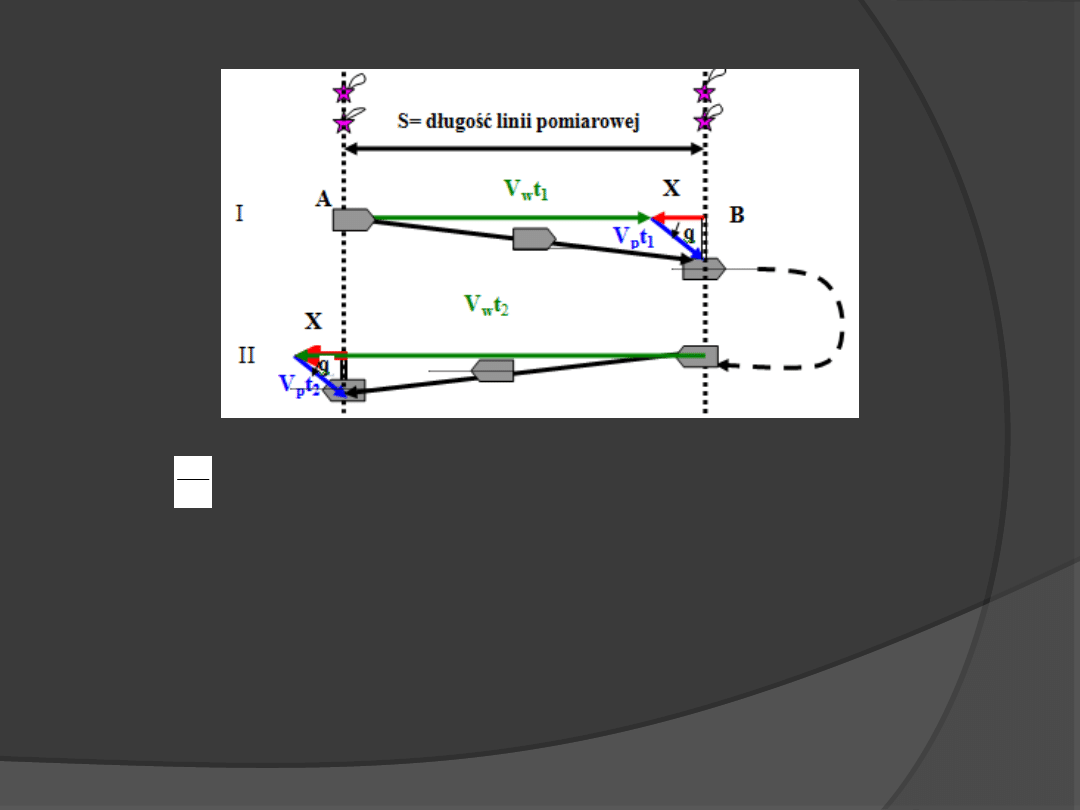
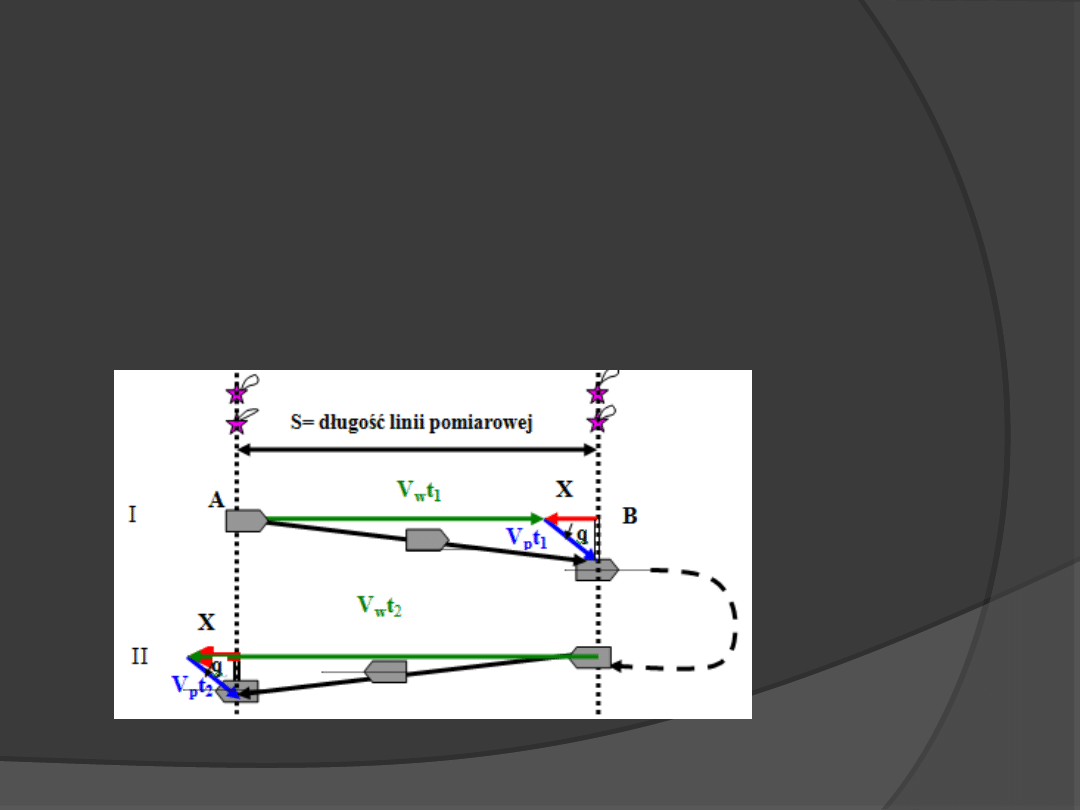
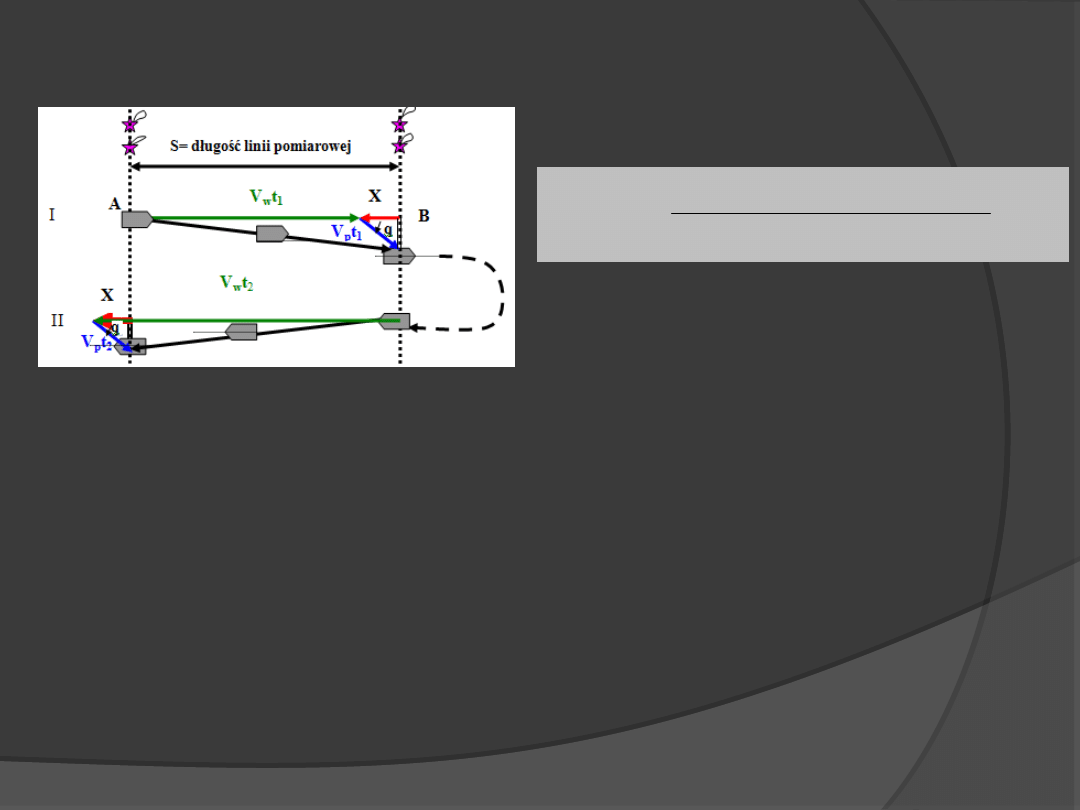
Wykorzystanie linii (mili) pomiarowej
Pomiary przeprowadza się wykorzystując dwie pary
nabieżników wyznaczających linię pomiarową o ustalonej
długości odczytanej z mapy. Warunki przeprowadzania
prób prędkości:
•stan morza 2,
•siła wiatru do 3 w skali Beauforta,
•akwen bezpieczny nawigacyjnie o długości min 6 Mil,
•głębokość akwenu min. sześcio krotnie większa od
zanurzenia statku,
•długość linii pomiarowej uzależniona od prędkości
statku
d = V/12,
•przebieg w obie strony linii pomiarowej w celu
wyeliminowania działania czynników zewnętrznych,
•zakłada się linię KR prostopadłą do linii nabieżników.
Pomiar prędkości i przebytej drogi
Legenda :
q- kąt między dziobową linią symetrii statku i wektorem
prądu,
t
1
-czas przebycia odległości AB,
t
2
-czas drugiego przebiegu,
V
p
- prędkość prądu,
V
w
– prędkość po wodzie,
V
d
– prędkość nad dnem,
S – długość linii pomiarowej z mapy.
Pomiar prędkości i przebytej drogi
Cos q = zatem : X = V
p
t
1
cos q
W pierwszym przebiegu równanie drogi S przyjmie postać:
S = V
w
t
1
+ X = V
w
t
1
+ V
p
t
1
cos q
W drugim przebiegu równanie drogi przyjmie postać:
S = V
w
t
2
- X = V
w
t
2
- V
p
t
2
cos q
1
t
V
X
p
Pomiar prędkości i przebytej drogi
Otrzymaliśmy parę równań z dwoma niewiadomymi: V
w
i
V
p
cosq
S = V
w
t
1
+ V
p
t
1
cos q \ t
2
S = V
w
t
2
- V
p
t
2
cos q \ t
1
St
2
= V
w
t
1
t
2
+ V
p
t
1
t
2
cos q
St
1
= V
w
t
2
t
1
- V
p
t
2
t
1
cos q
Sumując:
St
1
+ St
2
= 2 V
w
t
1
t
2
Stąd Vw:
2
1
2
1
2
)
(
t
t
t
t
S
Vw
Wykorzystując powyższy wzór wyznacza się na linii
pomiarowej prędkość statku po wodzie (V
w
) przy
różnych obrotach śruby CN, PN, WN, BWN, oraz kalibruje
logi.
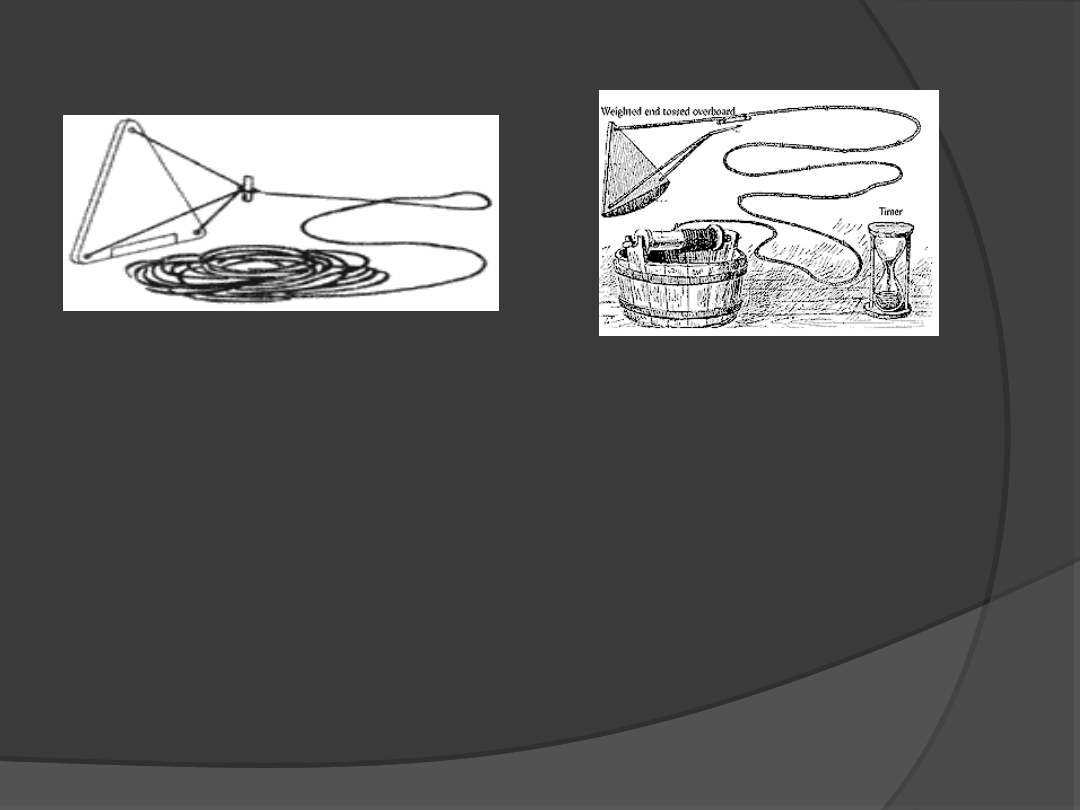
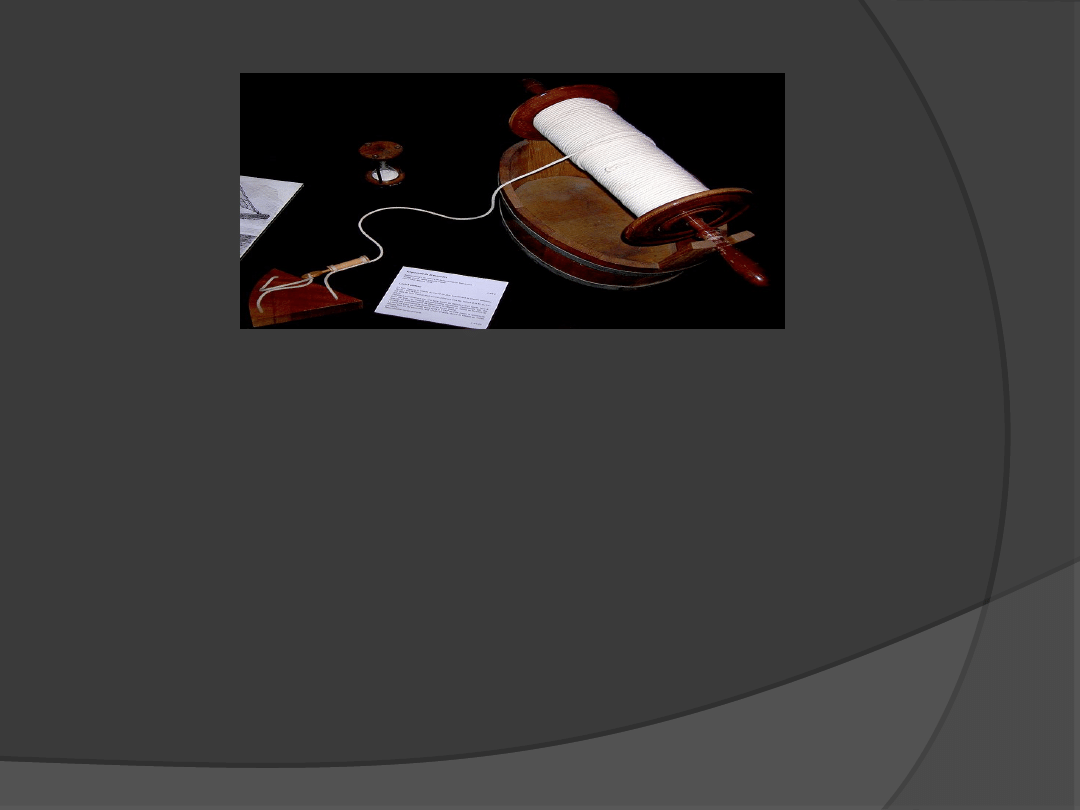
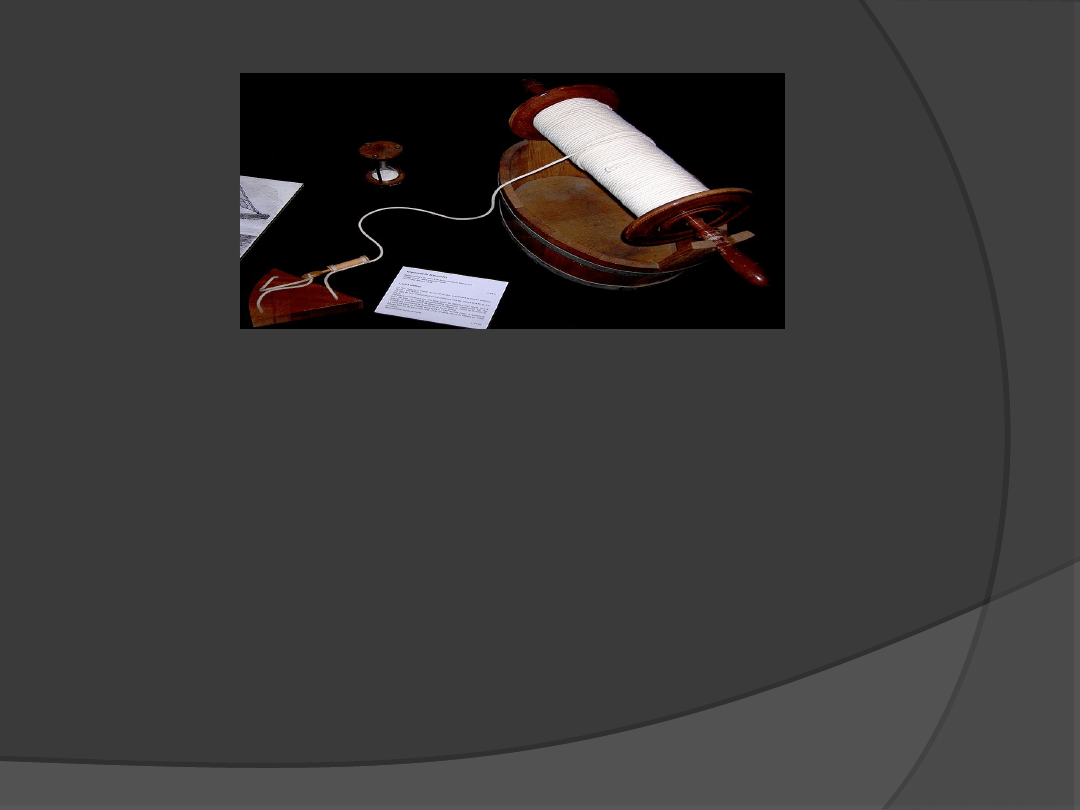
Pomiar prędkości z wykorzystaniem
klepsydry stosowany był przez wieki i nosił nazwę logu
ręcznego.
Log ręczny (chip-log) składał się z trójkątnej deszczułki,
której jeden bok był zaokrąglony i obciążony ołowiem, zaś
do każdego narożnika przymocowana była linka – w dwóch
rogach na stałe, w trzecim drewnianą wtyczką, którą
można było z deszczułki wyrwać mocniejszym
szarpnięciem.
Obciążona płytka rzucona do wody zachowywała pozycję
pionową i stwarzała na tyle duży opór, że praktycznie
zatrzymywała się w miejscu, gdy żaglowiec płynął dalej.
Metody pomiaru prędkości - logi
Trzymający zwój liny marynarz pozwalał, by lina
swobodnie rozwijała się z bębna z prędkością płynięcia
statku, natomiast bosman przepuszczał wybiegającą linę
przez palce i liczył zawiązane na niej węzły.
Węzły zawiązane były w równych odległościach zależnych
od stosowanej klepsydry.
Miarą prędkości była więc liczba odcinków liny logu,
która pozostała za rufą w określonym klepsydrą czasie.
Pomiar kończył się szarpnięciem za linę logu – wtyczka
umocowana w jednym z rogów deszczułki wypadała i
płytka kładła się poziomo, nie stawiając już większego
oporu, po czym całą linę logu można było znowu nawinąć
na bęben.
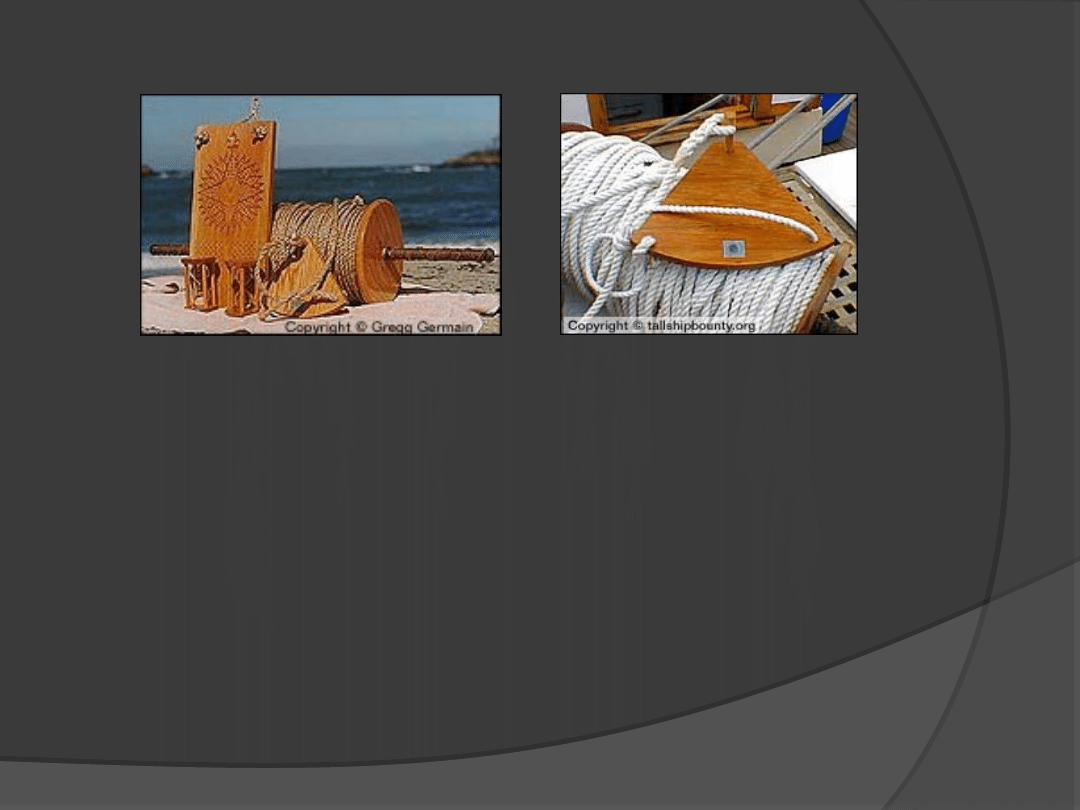
Metody pomiaru prędkości - logi
Pierwszy opis metody logu ręcznego przedstawił William
Bourne w 1574 roku.
Początkowo, węzły na linie pomiarowej nie były wiązane i
długość mierzono bezpośrednio na linie. Wraz z wprowadzeniem
w 15 wieku mili morskiej jako standardowej jednostki miary
odległości , lina zaczęła być oznaczana węzłami
rozmieszczonymi w równych odstępach, proporcjonalnych do
mili i przedziału czasowego wykorzystywanego do pomiaru.
Pierwotnie odstęp pomiędzy węzami wynosił 7 sążni lub 42
stopy . Do pomiaru czasu używano klepsydry 30 sekundowej.
Później przyjęcie innej długości mili morskiej spowodowało
konieczność zmiany odległości między węzłami. Ostatecznie,
odległość została ustalona na 47 stóp, 3 cale (14,4 m) dla
standardowej 28 sekundowe klepsydry.
Metody pomiaru prędkości - logi
Dzięki tej metodzie, prędkość statku po wodzie można było
zmierzyć z błędem około 1,5%, przy założeniu, że panel drewna
nie ulegał znacznemu dryfowi .a lina pomiarowa pozostawała
odpowiednio napięta .
Mimo że klepsydry i linki logów ręcznych to już tylko historia,
nazwa „węzeł” (
knot
) pozostała w powszechnym użyciu i
określa się nią nie tylko prędkości statków , ale również prędkość
wiatru.
Metody pomiaru prędkości - logi
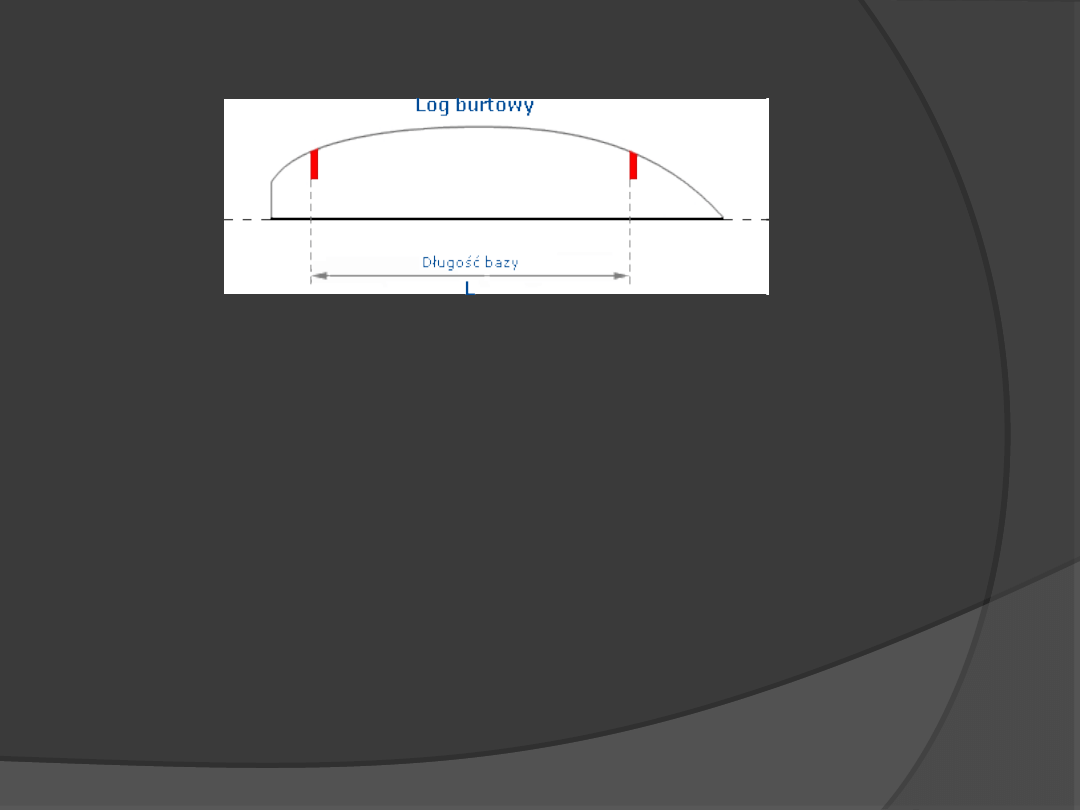
Log burtowy
- to nie przyrząd , lecz metoda pomiaru
prędkości po wodzie. Wykorzystywana jest na statkach o
małej prędkości.
Na burcie statku wyznacza się "bazę pomiarową",
wyskalowaną w metrach. Pomiar wykonuje się
następująco: rzuca się przed dziób jakiś dobrze widoczny,
pływający przedmiot. Gdy jest na trawersie początku
odcinka pomiarowego włącza się stoper. Gdy jest na
trawersie końca bazy pomiarowej, zatrzymuje się stoper i
oblicza prędkość statku w/g wzoru:
Vw = 3600 * L / 1852 * t
Vw - prędkość statku po wodzie [w]
L - długość bazy [m]
t - zmierzony czas [sek]
Metody pomiaru prędkości - logi
licznik
koło
zamachowe
łącznik
śruba
log lina
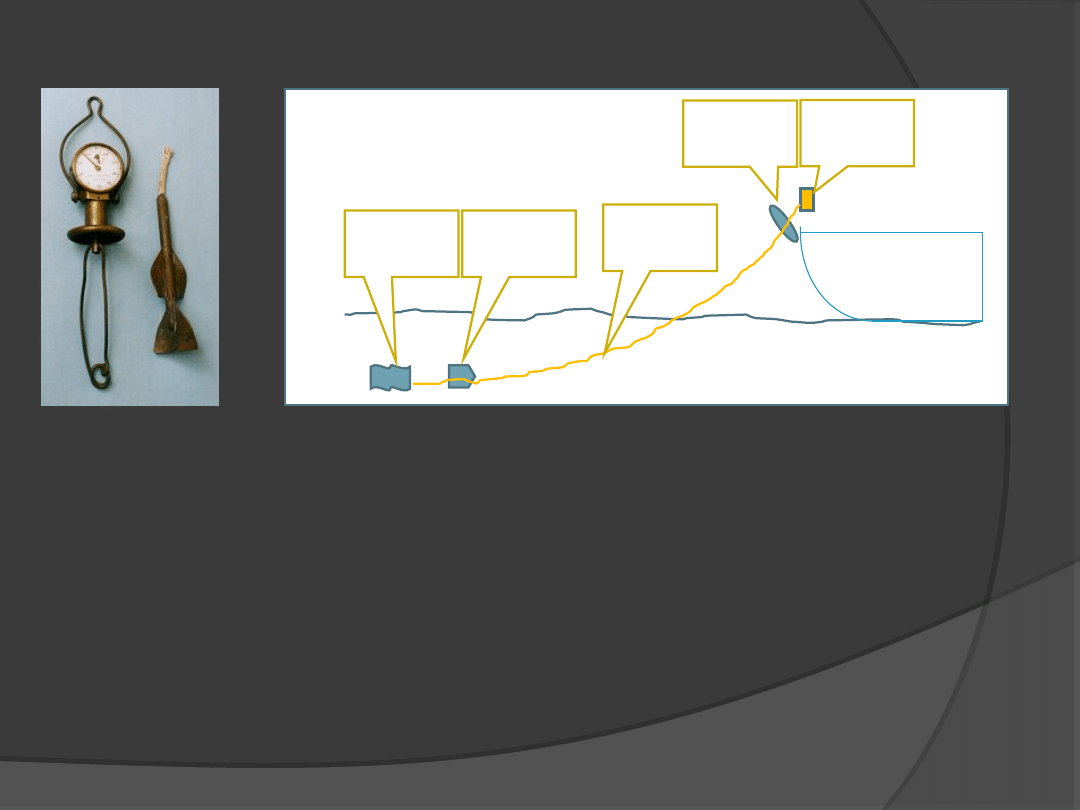
Log mechaniczny - Walker'a
Najdłużej używany przez statki przyrząd do pomiaru
prędkości,
choć współcześnie stosowany niezwykle rzadko.
Zasada pracy logu mechanicznego polega na zliczaniu
obrotów śruby o ustalonym skoku w wodzie, której obroty
przekazywane są przez loglinę do licznika zegarowego. Log
mechaniczny składa się z licznika zegarowego, logliny, koła
zamachowego, łącznika , śruby oraz podstawki (podkówki)
do zamocowania zegara na burcie.
Metody pomiaru prędkości - logi
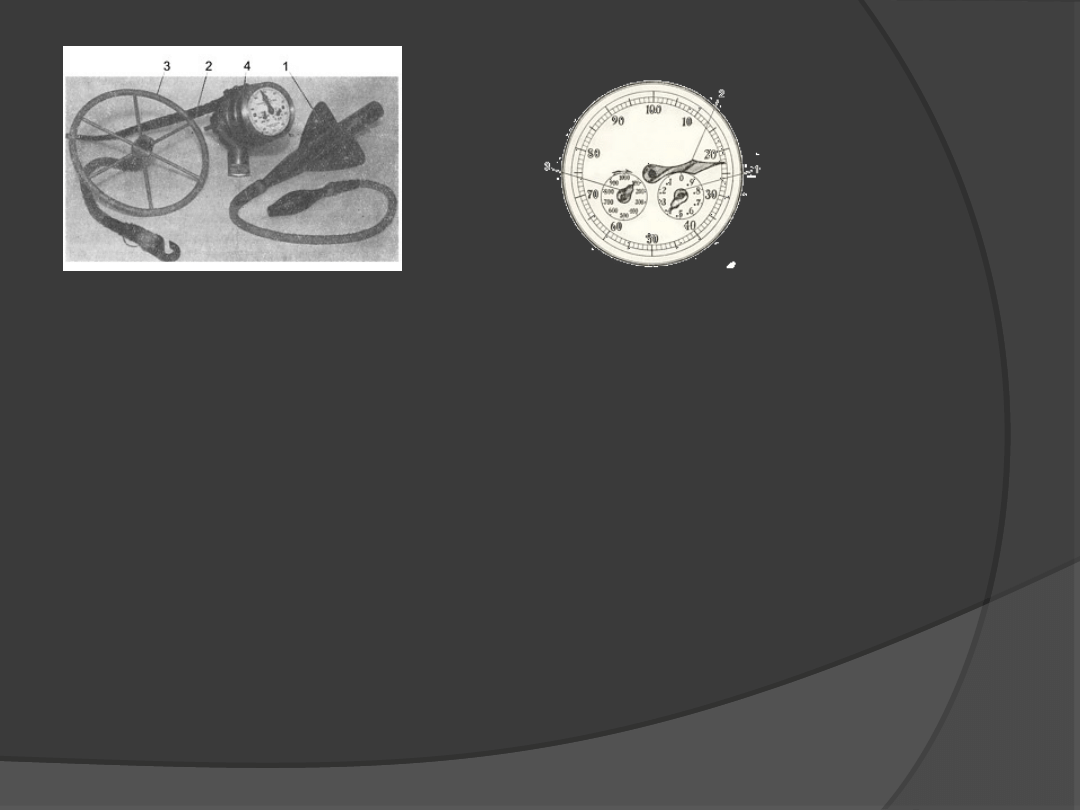
1-śruba ; 2-kabel do wskaźnika
elektrycznego ; 3-koło zama1-wskazówka
dziesiętnych części mili ; 2-wskazówka
mili ; 3-wskazówka setek mil.chowe ; 4-
licznik przebytej drogi.
Na zdjęciu brak loglinki.
1- wskazówka dziesiętnych części mili ;
2- wskazówka mili ;
3- wskazówka setek mil.
Metody pomiaru prędkości - logi
Niektóre logi mechaniczne mają repetytory, które
przekazują odczyt do kabiny nawigacyjnej ( repetytory
elektryczne). Koło zamachowe spełnia rolę regulatora
obrotów i amortyzatora. Licznik zazwyczaj ma trzy
wartości: setki mil, mile i kable. Logi te wskazują przebytą
drogę po wodzie, a nie bezpośrednio prędkość po wodzie.
Długość logliny w zależności od Vw wynosi:
Vw = 10w – 75 metrów
Vw = 14w – 90 metrów
Vw = 16w – 110 metrów
Vw = 18w – 120 metrów
Metody pomiaru prędkości - logi
Log elektryczny (Czernikijewa)
-
Działa na zasadzie przeliczania impulsów elektrycznych na
prędkość (w) i przebytą odległość (Mm). Z dna statku
wypuszcza się rurkę w której jest śruba o ustalonym skoku.
W zależności od prędkości statku po wodzie obraca się ona
wolniej lub szybciej przekazując obroty w postaci impulsów
do urządzenia przeliczającego, a następnie na wskaźnik w
kabinie nawigacyjnej.
Log ciśnieniowy
, log działający w oparciu o różnicę
ciśnienia dynamicznego w skierowanej do przodu rurce
(rurka Pitota) i ciśnienia statycznego w rurce skierowanej
pionowo. Różnica ciśnień powoduje ruch przepony,
przekazywany elektromechanicznie na tarczę wskaźnika.
Rurka Pitota - najprostsze urządzenie do pomiaru prędkości płynu,
oparte na zastosowaniu
. Była ona używana
pierwotnie do pomiaru prędkości rzek.
Została po raz pierwszy skonstruowana w 1732 roku przez
.
Metody pomiaru prędkości - logi
Log indukcyjny
Jego działanie opiera się na własności indukcji
elektromagnetycznej. Według tej własności, przesuwanie
przewodu w polu magnetycznym indukuje SEM , która jest
proporcjonalna w do prędkości jego ruchu przewodnika.
Specjalny magnes pod statkiem wytwarza pole magnetyczne.
Objętość wody, na które oddziałuje pole magnetyczne, można
uznać za zbiór elementarnych przewodów prądu
elektrycznego, indukujących SEM. Na podstawie wartości SEM
ustalana jest prędkość statku po wodzie i przebyta droga.
Metody pomiaru prędkości - logi
Log Dopplera
W tego typu logach wykorzystuje się zależność między
prędkością statku, a przesunięciem dopplerowskim
częstotliwości sygnału, emitowanego i odbieranego z
opóźnieniem po odbiciu od dna (Doppler sonar log).
Log Dopplera wskazuje w odróżnieniu od pozostałych logów
wskazuje prędkość statku i drogę nad dnem.
Efekt Dopplera – zjawisko obserwowane dla fal, polegające na powstawaniu
różnicy częstotliwości wysyłanej przez źródło fali oraz zarejestrowanej przez
obserwatora, który porusza się względem źródła fali. Dla fal
rozprzestrzeniających się w ośrodku, takich jak na przykład fale dźwiękowe,
efekt zależy od prędkości obserwatora oraz źródła względem ośrodka, w
którym te fale się rozchodzą.
Prędkość teoretyczną, odpowiadającą danej liczbie
obrotów śruby wylicza się stosując wzór:
gdzie : n – liczba obrotów na minutę,
h – skok śruby w metrach.
Różnica między prędkością teoretyczną i prędkością
rzeczywistą nazywa się uślizgiem śruby. Procentowa jej
wartość wyliczana jest wzorem:
Wyznaczanie prędkości wg obrotów śruby
1852
60
*
* h
n
V
teret
teor
w
teor
V
V
V
P
100
)
(
%
Poprawka procentowa współczynnik korekcyjny logu
Poprawka procentowa logu – jest to błąd logu
wyrażany w procentach, który można ustalić podczas
przebiegów na linii pomiarowej dokonując odczytów
wskazań logu przy każdorazowym przecięciu linii
nabieżnika.
Poprawka procentowa współczynnik korekcyjny logu
100
*
%
log
1
2
1
2
LOG
LOG
LOG
LOG
S
w
gdzie: S
w
- droga przebyta przez statek po wodzie,
S
w
=V
w
x(t
1
+t
2
)
t
1
- czas pierwszego przebiegu linii pomiarowej,
t
2
- czas drugiego przebiegu linii pomiarowej,
Δ LOG
1
= Log 2 - Log 1- różnica wskazań logu dla I przebiegu,
Log 1 – pierwszy odczyt logu na moment wejścia w linię
pomiarową,
Log 2 – drugi odczyt logu na moment wyjścia z linii
pomiarowej,
Δ LOG
2
= Log 4 - Log 3 -różnica wskazań logu dla II przebiegu,
Log 3 –trzeci odczyt logu na moment wejścia w linię
pomiarową,
Log 4 – czwarty odczyt logu na moment wyjścia z linii
pomiarowej.
Poprawka procentowa współczynnik korekcyjny logu
Poprawka procentowa ma znak:
(+), jeżeli S
w
> Δ LOG (odczyty logu zaniżane).
Np. pp = + 5% oznacza , że odczyty logu należy zwiększyć o 5
%
(-), jeżeli S
w
< Δ LOG (odczyty logu zawyżane).
Np. pp = - 5% oznacza , że odczyty logu należy pomniejszyć
o 5 %
Tym samym znając poprawką procentową logu, można
każdorazowo udokładnić wskazania drogi po wodzie S
w
, jakie
pokazał log.
Na podstawie wskazanego wzoru opracowano tablicą N
o
36 TN-
74, którą posługiwać się można w celu obliczenia przebytej drogi
przy znanej poprawce logu.
Uwzględnienie poprawki nie oznacza oczywiście przeliczenia
prędkości po wodzie na prędkość nad dnem.
To poprawka instrumentalna, udokładniającą wskazania logu.
)
100
%
1
(
*
LOG
LOG
Sw
Poprawka procentowa współczynnik korekcyjny logu
Współczynnik korekcyjny logu WK
– jest to stosunek
drogi po wodzie do drogi zmierzonej przez log. Jest to
błąd logu wyrażony liczbą.
LOG
S
LOG
LOG
S
wk
w
w
1
2
Odczyty logu zaniżone, jeżeli WK > 1;
Odczyty logu zawyżane, jeżeli WK < 1;
Błąd logu nie występuje, jeżeli WK=1.
Znając współczynnik korekcyjny logu można wyliczyć
drogę statku po wodzie:
LOG
WK
LOG
LOG
WK
S
W
*
)
1
2
(
Poprawka procentowa współczynnik korekcyjny logu
Korzystanie ze współczynnika korekcyjnego logu jest
bardziej wygodne niż z Δ LOG% gdyż:
• nie trzeba uwzględniać znaku,
• łatwiej przeprowadzać wyliczenia przebytej drogi po
wodzie.
Zależności między poprawką procentową logu i
współczynnikiem korekcyjnym przedstawiają się
następująco:
ΔLOG % =( WK –1) * 100
1
100
%
LOG
WK
Np. pp = - 7% to wk =
0,93
pp = + 4 % to wk =
1, 04
PRZYKŁAD I
Dokonano dwóch przebiegów na linii pomiarowej o długości 1,5 Mm. Czas
przebiegu na kierunku 225 t
1
=870 sek , czas przebiegu drugiego na kontr
kierunku wyniósł t
2
= 550 sek. Różnice wskazań logu dla 1 przebiegu wyniosły
ΔLOG 1 = 1,8 Mm , dla drugiego przebiegu ΔLOG 2 = 1,6 Mm. Obliczyć
prędkość statku po wodzie, współczynnik korekcyjny logu , poprawkę
procentową logu.
Rozwiązanie :
obliczenie prędkości po wodzie
obliczenie drogi po wodzie:
obliczenie drogi wg logu:
Obliczenie ΔLOG% oraz WK :
w
t
t
t
t
S
V
W
8
957000
7668000
550
870
2
3600
)
550
870
(
5
,
1
2
2
1
2
1
Mm
t
t
V
t
V
S
W
W
W
16
,
3
1555
,
3
3600
550
870
8
3600
2
1
ΔLOG = ΔLOG1 + LOG2 = 1,8+1,6 =3,4
Mm
93
,
0
9294
,
0
4
,
3
16
,
3
LOG
S
wk
w
ΔLOG % = ( WK – 1)100 = ( 0,93 –1 )
100 = -7 %
PRZYKŁAD II
Godz. 0810 ,stan logu 15,3 ,prawy trawers pławy „A” ,KDd= KR=
300.
Godz. 0834, stan logu 21,3 ,prawy trawers pławy „B” ,KDd= KR=
300.
Współczynnik korekcyjny logu 1,1. Odległość trawersowa między
pławami
8 Mm, prąd równoległy do ruchu statku. Obliczyć prędkość statku
nad dnem, prędkość po wodzie, prędkość i kierunek prądu.
Rozwiązanie
Obliczenie drogi po wodzie:
S
w
= Δ LOG x WK = (21,3 –15,3) * 1,1 =6 1,1 =
6,6Mm
Obliczenie prędkości po wodzie
w
h
Mm
t
S
Vw
w
5
,
16
24
60
6
,
6
60
24
6
,
6
Obliczenie prędkości nad dnem:
w
h
Mm
t
S
Vd
d
20
24
60
8
60
24
8
Ponieważ prąd działa równolegle do ruchu statku ( przypadek prosty)
z wyliczeń uzyskano Vd > Vw , co oznacza ,że kierunek prądu był
zgodny z ruchem statku, czyli
Kp = KDd = KR =
300⁰
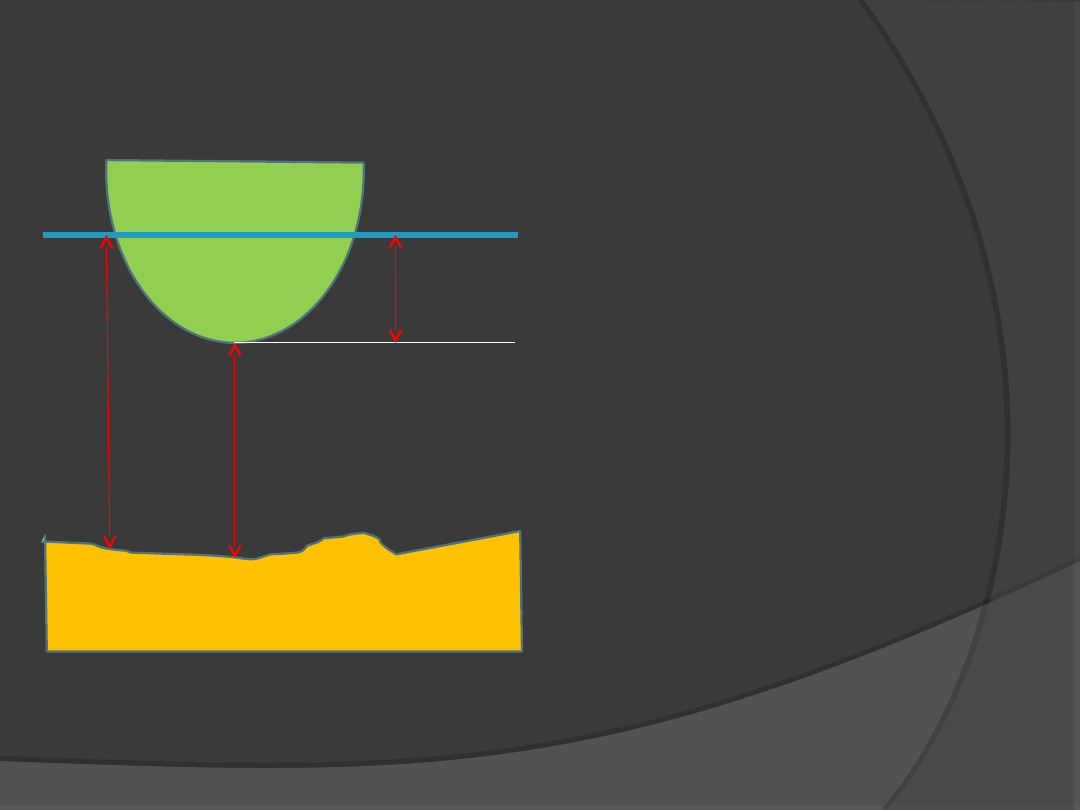
Pomiar głębokości - rezerwa wody pod stępką
Istotą pomiaru głębokości na
statku jest ustalenie aktualnej
odległości pomiędzy
powierzchnią wody, a dnem G.
Z punktu widzenia
bezpieczeństwa żeglugi bardzo
ważną jest także odległość
pomiędzy dnem statku (kilem) ,
a dnem morskim .
Odległość ta nazywana jest
„
rezerwą wody pod stępką
„ R
Wartość tą można ustalić przez
bezpośredni pomiar echosondą,
której oscylatory znajdują się pod
dnem statku, bądź też,
odejmując od aktualnej
głębokości akwenu wartość
zanurzenia statku Z
Z
R
G
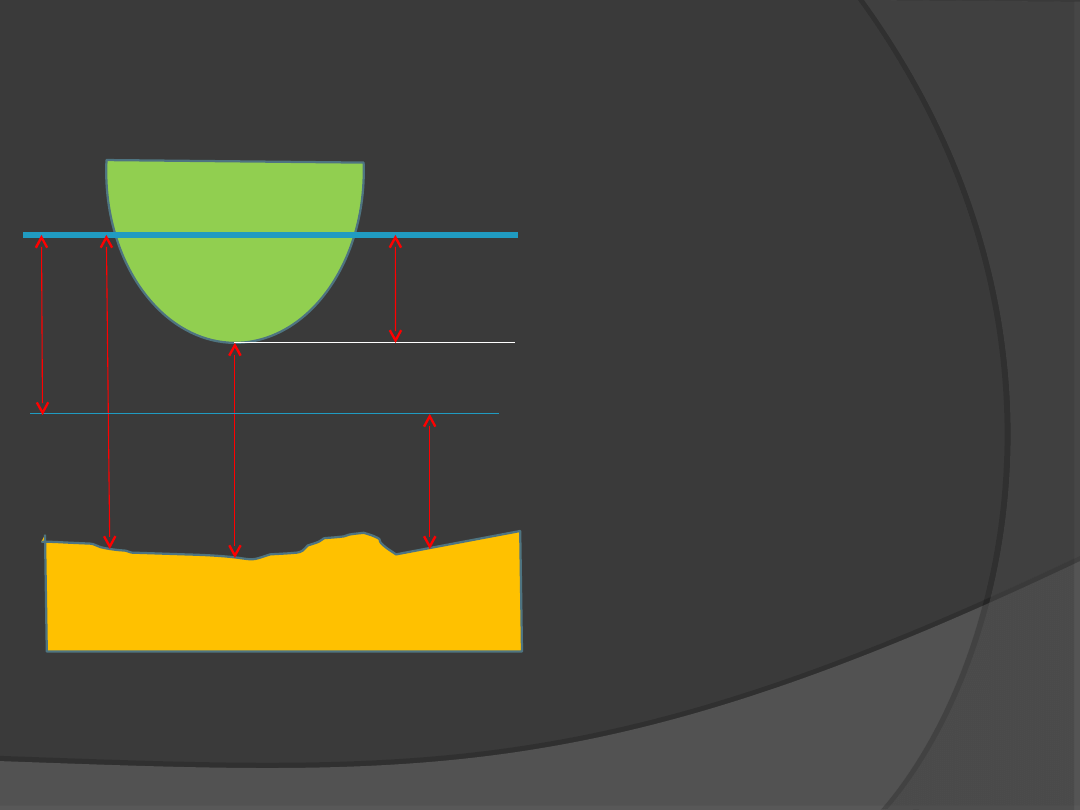
Pomiar głębokości - zero mapy
Ponieważ poziom morza
zmienia się , głównie ze względu
na zjawisko pływu, głębokości
podane na mapie morskiej
odniesione są do ustalonego
poziomu zwanego zerem mapy
CD (
chart datum
).
Zero mapy ustala się
najczęściej na poziomie
najniższego pływu LAT
(
Lowest Astronomical Tide
).
Daje to prawie 100% pewność ,
że aktualna głębokość G nie
będzie mniejsza od tej, jaką
wskazano na mapie G
m
.
W rejonach pływowych ,
wzniesienie powierzchni wody
nad CD mówi o aktualnej
wysokości pływu H
t.
Z
R
G
CD
G
m
H
t
Pomiar głębokości - sonda ręczna
Sonda ręczna
( ołowianka ) to wyskalowana lina z
obciążnikiem
Dawniej ołowianka, która swą nazwę zawdzięcza ołowianemu
obciążnikowi znajdującemu się na końcu liny, miała szerokie
zastosowanie w nawigacji. Obecnie, z uwagi na powszechne
użycie echosond, zastosowanie sond ręcznych jest
ograniczone do małych jednostek , bądź sytuacji
szczególnych, np. wejście statku na mieliznę.
Sonda ręczna składa się z trzech części: obciążnika
(ciężarka), liny pomiarowej (tzw. sondoliny) i wałka do
nawijania liny. Najczęściej znaki na sondolinie rozmieszczone
są co 1 metr. Otwór w ciężarku wypełnia się łojem dla pobrania
próbki dna.
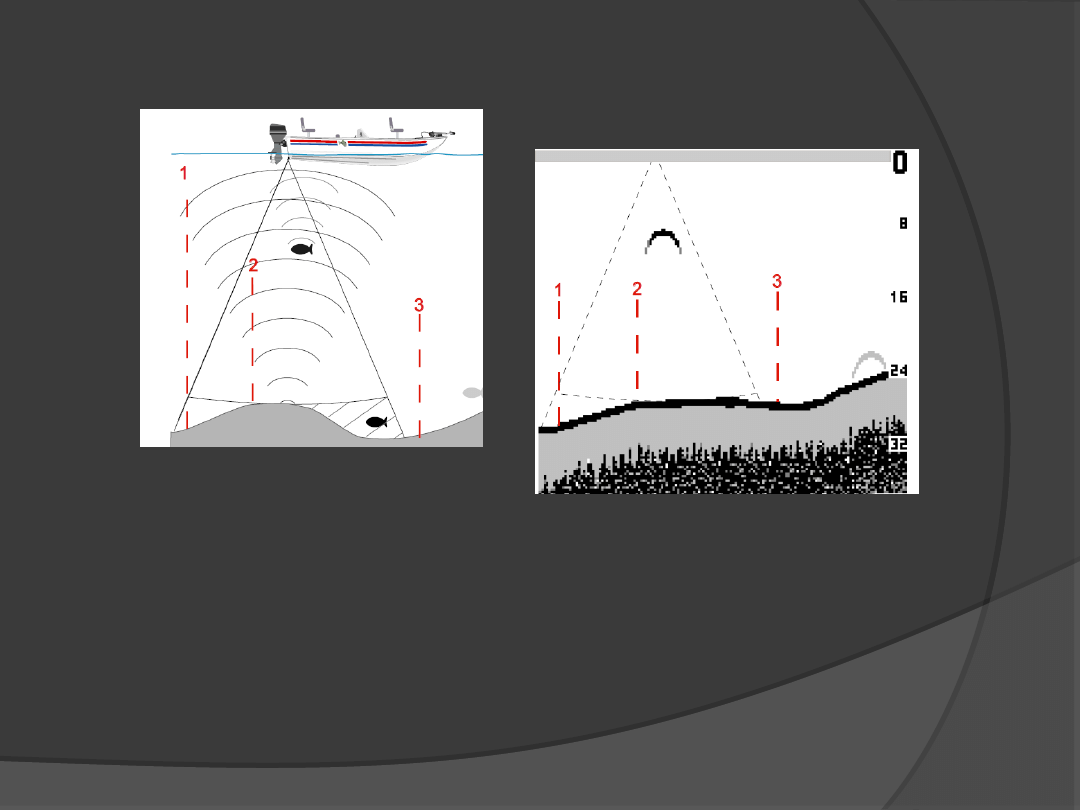
Pomiar głębokości - echosonda pionowa
Echosonda
jest urządzeniem służącym do pomiaru
głębokości wody oraz odległości od unoszących się w
obiektów.
Sama nazwa echo-sonda wskazuje na użycie fal dźwiękowych
w celu określenia aktualnej głębokości. Odległości te oblicza
się mierząc czas powrotu dźwięku odbitego od dna,
przeszkody, okrętu podwodnego, ławicy ryb itp. Stąd w
praktyce morskiej, przez słowo sondowanie rozumie się
mierzenie głębokości.
Pomiar głębokości - echosonda pionowa
Ultradzwiękowy impuls sondujący jest wytwarzany w
przetworniku piezoelektrycznym. W wodzie rozchodzi się z
prędkością ok. 1500 m/s Fala dźwiękowa odbita od dna lub
innego przedmiotu wraca do statku, gdzie jest odbierana
przez ten sam przetwornik i zamieniana na impuls elektryczny.
Czas między wysłaniem i odebraniem impulsu daje informację
o odległości do przedmiotu od którego impuls się odbił.
W dawnych echosondach pomiar odbywał się
mechanicznie. Sygnał był wysyłany, gdy specjalny rysik mijał
brzeg papieru, odebrany sygnał był wzmacniany i podawany
na rysik, który na papierze termoczułym wypalał ślad.
Ponieważ rysik poruszał się ze stałą i znaną prędkością,
odległość od brzegu (lub śladu po wysłaniu impulsu) do śladu
po odebranym impulsie informowała o głębokości.
Pomiar głębokości - echosonda pionowa
Wraz z rozwojem technik komputerowych pojawiły się
echosondy pokazujące profil dna na monitorze oraz
przesyłające informacje do innych systemów nawigacyjnych.
Aktualnie korzysta się z nowszej technologii i echosond
cyfrowych, które dzięki skonstruowaniu układów
elektronicznych zdolnych zmierzyć czas z dokładnością do
milisekund, pokazują wynik głębokości na wyświetlaczu w
postaci cyfrowej.
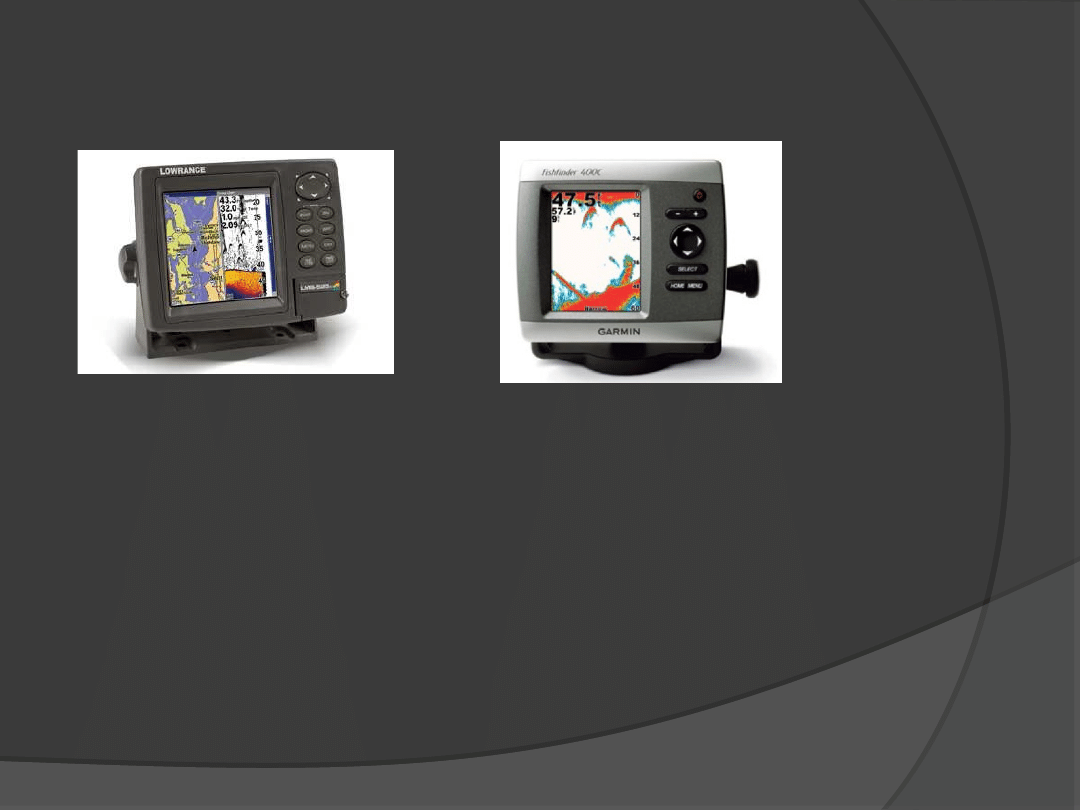
Pomiar głębokości - sonda wielowiązkowa
W celu zwiększenia wydajności oraz skuteczności pomiarów
stosuje się echosondy wielowiązkowe, czyli takie, które z
jednego przetwornika emitują kilka lub kilkanaście wiązek
sygnału w różnych kierunkach.
Rozwiązanie to pozwala na przeszukanie znacznie większego
obszaru w porównaniu z echosondą jednowiązkową poprzez
zwiększenie szerokości pasa przeszukiwania.
Echosonda wielowiązkowa MBES (
Multi Beam Echo Sounder
) jest kombinacją rozwiązań sprzętowych i programowych,
wykorzystujących kilka zaawansowanych technik, m.in.
technikę elektronicznego formatowania i śledzenia wiązki fali
hydroakustycznej oraz technikę sygnałowej obróbki danych.
·
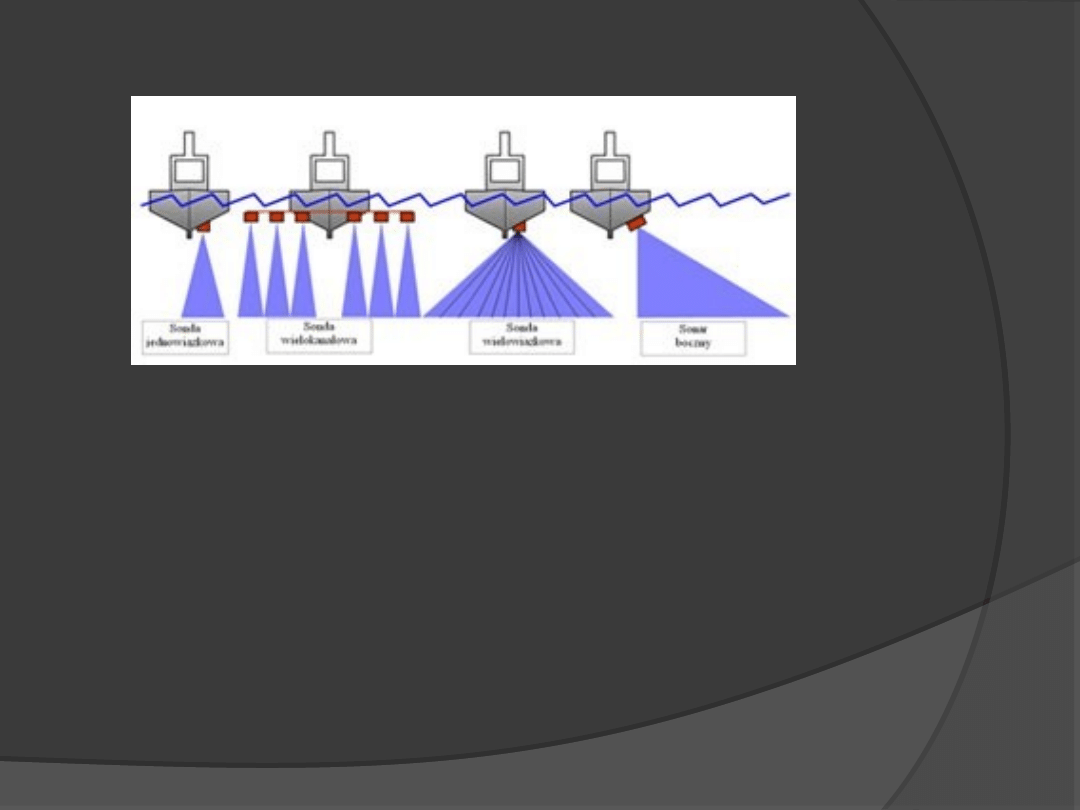
Pomiar głębokości - sonar
Sonar
jest rodzajem echosondy
jedno lub wielowiązkowej, dzięki
której uzyskujemy obraz całego dna,
oraz obiektów w niej zanurzonych.
Nazwa jego wywodzi się z angielskiej
nazwy
Sound Navigation and
Ranging
, co oznacza nawigację i
wyznaczanie odległości za pomocą
dźwięku.
Urządzenie to jest szczególnie
pożyteczne podczas poszukiwania
przeszkód podwodnych oraz
prowadzenia połowów. Za pomocą
sonaru można określić głębokość
dowolnego punktu na dnie, oraz
wymiary napotkanej przeszkody:
długość, szerokość, wysokość.
KONIEC WYKŁADU
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
Wyszukiwarka
Podobne podstrony:
Nawigacja fragmenty wykładu 4 ( PP 2003 )
Nawigacja fragmenty wykładu 4 ( PP 2003 )
osobowosc wyklad 4 pp
osobowosc wyklad 8 pp
Bezpieczeństwo nawigacji - Wykład 1, AM SZCZECIN, Bezpieczeństwo nawigacji
Bezpieczeństwo nawigacji - Wykład 9, AM SZCZECIN, Bezpieczeństwo nawigacji
DROGA I PRĘDKOŚĆ STATKU, Akademia Morska Szczecin, SEMESTR II, NAWIGACJA, wykłady II sem
materialy wyklad pp cz 1 (2)
Bezpieczeństwo nawigacji - Wykład 6, AM SZCZECIN, Bezpieczeństwo nawigacji
W-6 Notices, Akademia Morska Szczecin Nawigacja, uczelnia, AM, AM, nawigacja, wykłady II sem o6-07
program zajęc aud I sem 10-11, Szkoła, penek, Przedmioty, Nawigacja, Teoria, Materiały do nauki na I
wykłady, zaburzenia osobowoťci-luty-Mariusz, Dr Drozdowski, wykład z lutego 2003 roku nt
Bezpieczeństwo nawigacji - Wykład 5, AM SZCZECIN, Bezpieczeństwo nawigacji
Zdefiniowanie pojęcia południka zerowego, Akademia Morska, I semestr, Nawigacja, Wykłady kpt. Ferlac
Opracowanie na kolokwium, Akademia Morska, I semestr, urządzenia nawigacyjne, Test do Gucmy, Urządze
dr Boratyński 3 materialy wyklad pp cz 3
Alicja Siemak-Tylikowska - Dydaktyka ogólna (wyklady 2002-2003), Pedagogika UW
W-6 Notices- move, Akademia Morska Szczecin Nawigacja, uczelnia, AM, AM, nawigacja, wykłady II sem o
więcej podobnych podstron