XV. STEROWANIE
XV. STEROWANIE
ADAPTACYJNE
ADAPTACYJNE
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
2
Istota sterowania adaptacyjnego
Pojęcie sterowania adaptacyjnego jest używane od 1950 roku,
kiedy to William I. Caldwell (1907-2002) opracował pierwszy
patent na regulator adaptacyjny (Control system with
automatic response adjustment, US 2517081).
W ciągu następnych lat powstało wiele definicji sterowania
adaptacyjnego.
Według Encyklopedii Techniki – Automatyka, układem
sterowania
adaptacyjnego nazywa się układ sterowania automatycznego,
mający właściwość przystosowywania się do zmiennych
warunków pracy całego lub części układu, w celu
utrzymania jego
pożądanego działania lub stanu.
Według K.J. Astroma, regulator
regulator
adaptacyjny
adaptacyjny
to taki, który może
zmieniać swoje działanie
odpowiednio do zmian dynamiki
procesu i zakłóceń.
Karl Johan
Astrom
(ur. 1934)
Szwedzki fizyk
i automatyk.

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
3
Przystosowanie to może nastąpić przez zmianę:
- wartości zadanych
wartości zadanych
, np. punktu pracy,
- parametrów układu
parametrów układu
, np. nastaw regulatora, stałych
czasowych, czasu opóźnienia, współczynnika
wzmocnienia, współczynnika tłumienia), wówczas
występuje
parametryczne sterowania adaptacyjne
,
- struktury układu
struktury układu
, np. zmiany struktury regulatora lub
wprowadzenia dodatkowego sprzężenia zwrotnego w
układzie.
W działaniu układów adaptacyjnych można wyróżnić dwie
funkcje: identyfikację
identyfikację
własności charakteryzujących
dynamikę układu sterowania oraz nastrajanie
nastrajanie
, jako
odpowiednią zmianę jego parametrów, przebiegające w
torze otwartym lub w torze zamkniętym.

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
4
Podstawowe struktury
układów parametrycznego sterowania
adaptacyjnego
przestrajaniem nastaw regulatora
GS - gain scheduling
modelem odniesienia
MRAS - model reference adaptive
system
regulatorem samonastrajającym
STR - self tuning
regulator.
Punktem wyjścia jest sterowanie procesem i regulatorem o
nastawnych parametrach w układzie ze zwykłą pętlą
ujemnego sprzężenia zwrotnego.
Podstawowym problemem jest znalezienie sposobu zmiany
parametrów regulatora w zależności od zmian dynamiki
procesu i zakłóceń.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
5
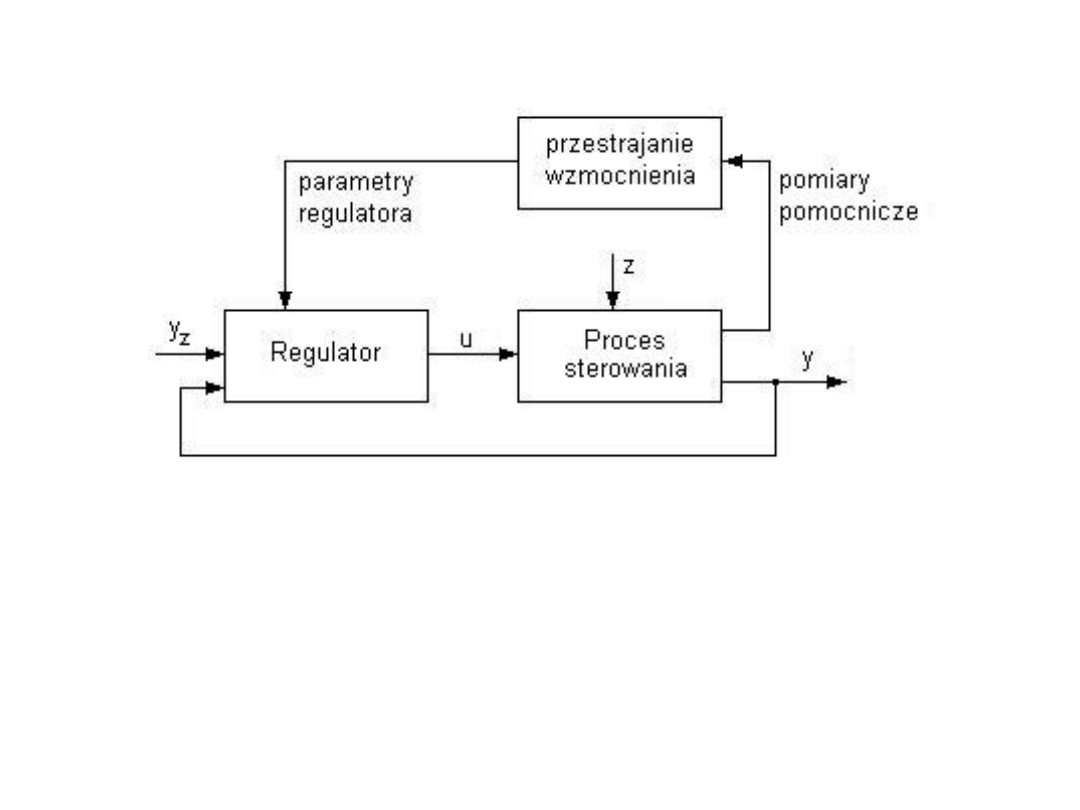
Układ adaptacyjny GS
z przestrajaniem nastaw regulatora
W praktyce możliwe jest znalezienie zmiennych
pomocniczych, które są dobrze skorelowane ze zmianami
parametrów dynamiki procesu.
Takie podejście nazywane jest przestrajaniem wzmocnienia,
ponieważ oryginalny układ był wykorzystywany do
dostosowania zmian tylko poprzez regulację wzmocnienia.

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
6
Zasadniczym problemem projektowania takich układów
jest znalezienie, na podstawie własności fizycznych
procesu, odpowiednich zmiennych przestrajających.
Dla przemysłowych, w tym i okrętowych procesów
sterowania, jako zmienne przestrajające mogą być
wybierane:
– stała czasowa
– czas opóźnienia,
Na przykład stała czasowa dynamiki statku w układzie
regulacji kursu jest odwrotnie proporcjonalne do
prędkości statku.

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
7
Pewną wadą przestrajania wzmocnienia jest to, że
stanowi kompensację w układzie otwartym i brakuje
sprzężenia zwrotnego korygującego błędne
przestrajanie.
Innym niedostatkiem jest czasochłonność projektowania.
Parametry regulatora muszą być określone w odniesieniu
do wielu warunków operacyjnych, a działanie układu
wymaga sprawdzenia przez dużą liczbę symulacji.
Natomiast zaletę przestrajania wzmocnienia stanowi
możliwość bardzo szybkich zmian parametrów
regulatora w odpowiedzi na zmiany procesu.
Czynnikiem ograniczającym adaptację jest szybkość
reakcji wielkości pomocniczych na zmiany procesu.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
8
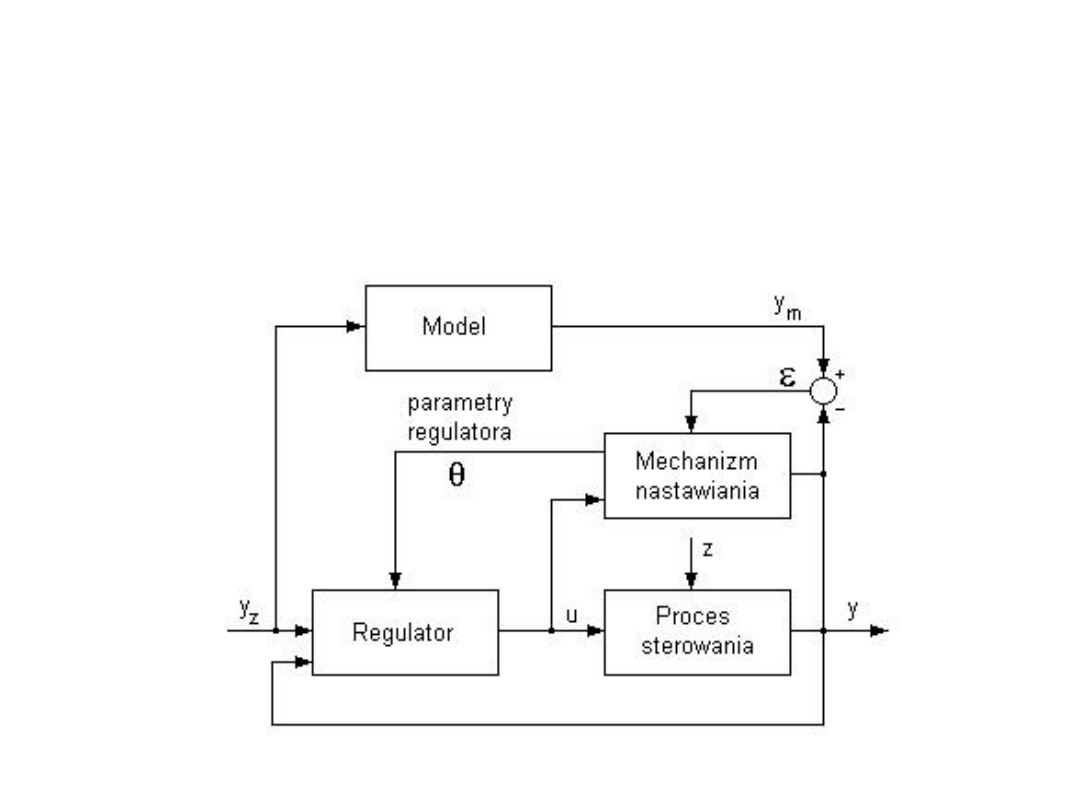
Układ adaptacyjny MRAS z modelem
odniesienia
Wprowadza się do układu sterowania model odniesienia
jako taki, który pokazuje idealną reakcję przebiegu
wyjściowego procesu na sygnał sterujący.
W układzie tym regulator stanowi połączenie dwóch pętli
regulacyjnych.

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
9
Wewnętrzna pętla jest zwykłą pętlą regulacyjną
zawierającą proces sterowania i regulator.
Parametry regulatora są nastawiane przez nią w taki
sposób, że błąd między wyjściem modelu y
m
i
wyjściem procesu y maleje.
Problem podstawowy stanowi określenie zasady działania
mechanizmu nastawiania tak, aby uzyskać układ
stabilny, który sprowadza błąd do zera.
Jednak tego problemu nie można rozwiązać przez proste
liniowe sprzężenie zwrotne z uchybem parametrów
regulatora.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
10
W pierwotnym układzie adaptacyjnym z modelem
odniesienia wykorzystywano zasadę działania
mechanizmu nastawiania zwaną regułą MIT:
grad
k
dt
d
Składowe wektora są nastawialnymi parametrami
regulatora, natomiast składowe wektora
stanowią pochodne wrażliwości, z uwzględnieniem
parametrów nastawiania.
Wrażliwość może być generowana jako wyjście układu
liniowego pobudzanego sygnałami wejściowymi i
wyjściowymi procesu.
Wartość współczynnika k określa szybkość adaptacji.
grad
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
11
Jeżeli powyższy wzór przedstawić w postaci:
Taka konfiguracja przestrajania jest typowa dla wieli
układów adaptacyjnych, na przykład dla adaptacyjnych
autopilotów okrętowych.
Reguła MIT działa dobrze w odniesieniu do małych
wartości współczynnika k.
Dopuszczalna jego wartość zależy od wartości
bezwzględnej sygnału odniesienia. W rezultacie nie jest
możliwe określenie granic, które gwarantują stabilność.
Stosowanie reguły MIT może doprowadzić do
niestabilnego układu z pętlą zamkniętą.
Inną regułę nastawiania daje się uzyskać, wykorzystując
teorię stabilności, a w szczególności metodę Lapunowa.
ds
s
grad
s
k
t
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
12
Układ adaptacyjny STR
z regulatorem samonastrajającym
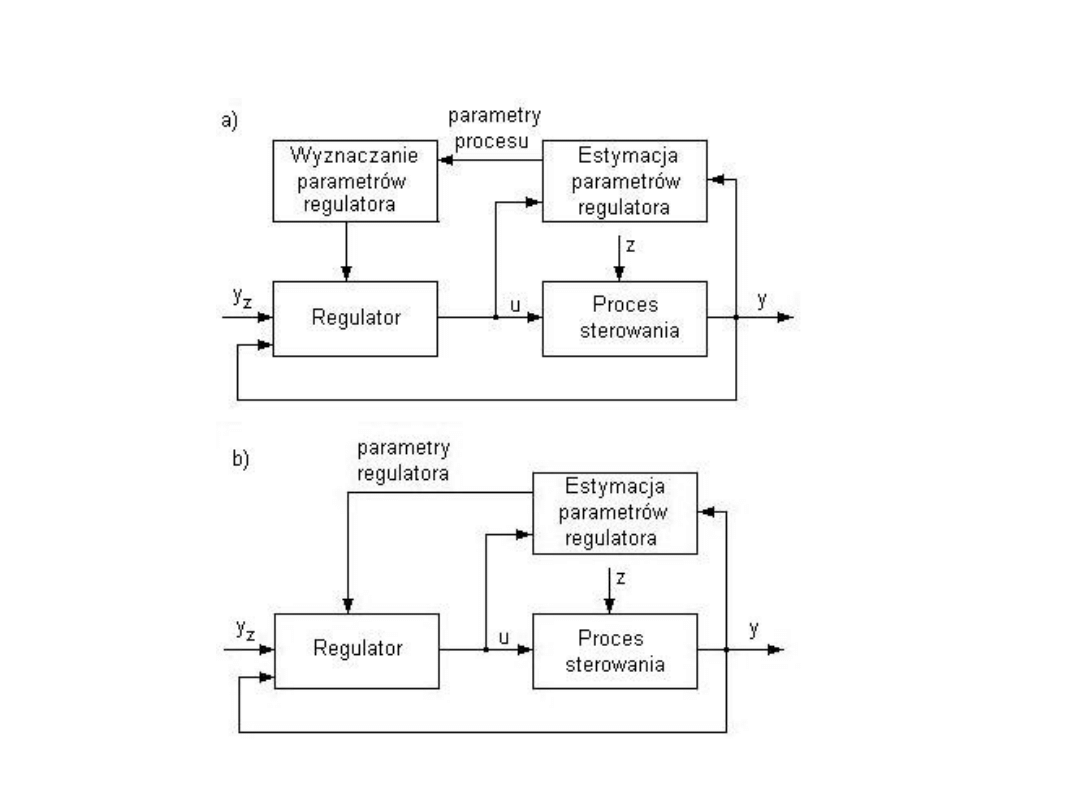
Układ realizuje regulację adaptacyjną stochastyczną
obiektu znajdującego się pod wpływem zakłóceń
przypadkowych, o zmieniających się właściwościach
dynamicznych torów sterowania i zakłócenia.
Przy czym rozróżnia się adaptację pośrednią
adaptację pośrednią
, podczas
której przeprowadzana jest estymacja parametrów
modelu toru sterowania i toru zakłócenia obiektu w
celu uaktualnienia parametrów algorytmu regulacji
oraz adaptację bezpośrednią
adaptację bezpośrednią
.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
13
Schemat blokowy układu regulacji z adaptacją
stochastyczną:
a) pośrednią, b) bezpośrednią
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
14
Algorytmy regulacji adaptujące się jednorazowo do
stałych, lecz nieznanych własności dynamicznych,
nazywa się algorytmami samonastrajającymi
samonastrajającymi
się.
Jednorazowe adaptowanie znajduje zastosowanie w
automatycznym strojeniu kilku algorytmów regulacji
dla obiektów o stałych parametrach lub w powolnych
zmianach własności dynamicznych obiektu, dla którego
wystarcza periodyczne dostrajanie algorytmu.
Natomiast trudniejszymi do realizacji są algorytmy
regulacji, umożliwiające adaptowanie się do własności
obiektu, zmieniających się powoli, które nazywa się
algorytmami samoprzestrajającymi
samoprzestrajającymi
się.

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
15
Algorytm pośredniej regulacji samonastrajającej składa
się z:
- rekurecyjnego algorytmu identyfikacji ze
współczynnikiem zapominania, równym jedności lub
rekurencyjnego algorytmu uczenia, przy czym
najczęściej stosowanymi rekurencyjnymi algorytmami
identyfikacji są algorytmy najmniejszych kwadratów i
największej wiarygodności,
- algorytmu wyznaczania parametrów dla algorytmów
regulacji na podstawie wyznaczonych parametrów
modelu obiektu,
- odpowiedniego algorytmu regulacji.

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
16
Podczas bezpośredniej regulacji samonastrajającej
przekształca się model tak, aby zawierał wszystkie
parametry występujące w algorytmie regulacji oraz
aby te parametry wchodziły do przekształconego
modelu liniowo i w taki sposób, by możliwa była ich nie
obciążona estymacja za pomocą rekurencyjnej metody
najmniejszych kwadratów w warunkach działania
rekurencyjnie strojonego algorytmu regulacji.
Takie rozwiązanie jest najczęściej stosowane w
minimalno-wariancyjnych algorytmach regulacji, na
przykład według Äströma – Wittenmarka.

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
17
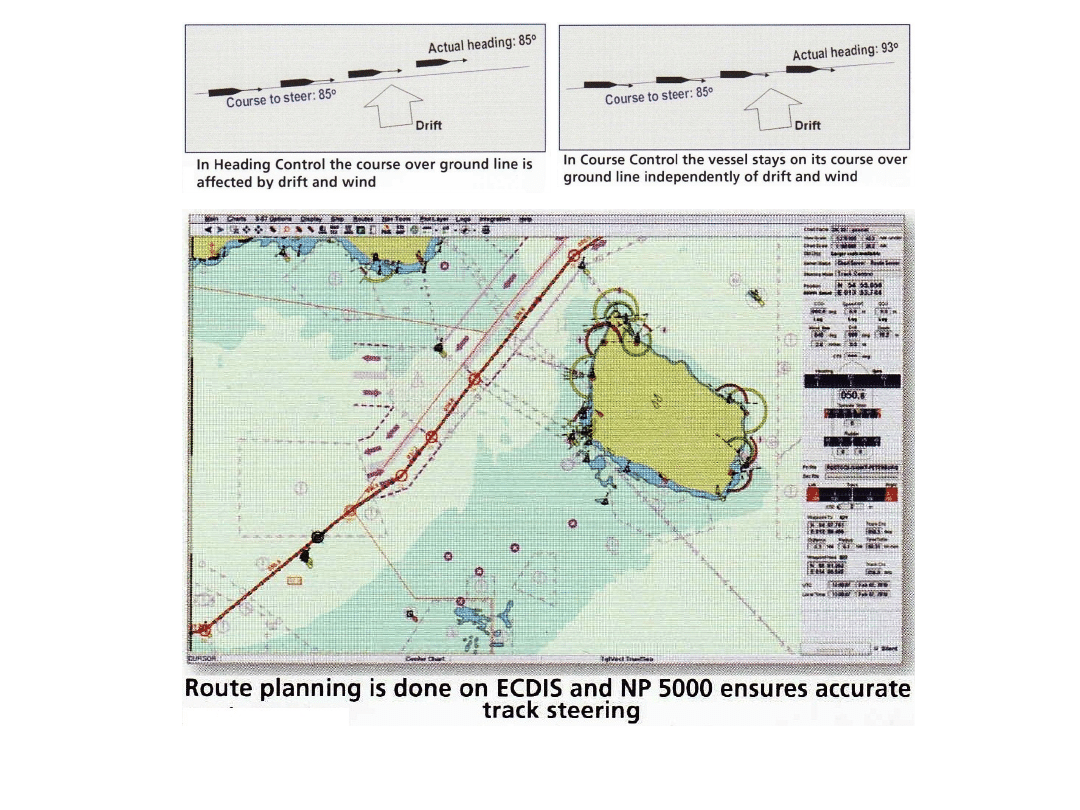
Autopilot adaptacyjny NautoPilot 5000, Raytheon Anschutz
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
18
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
19
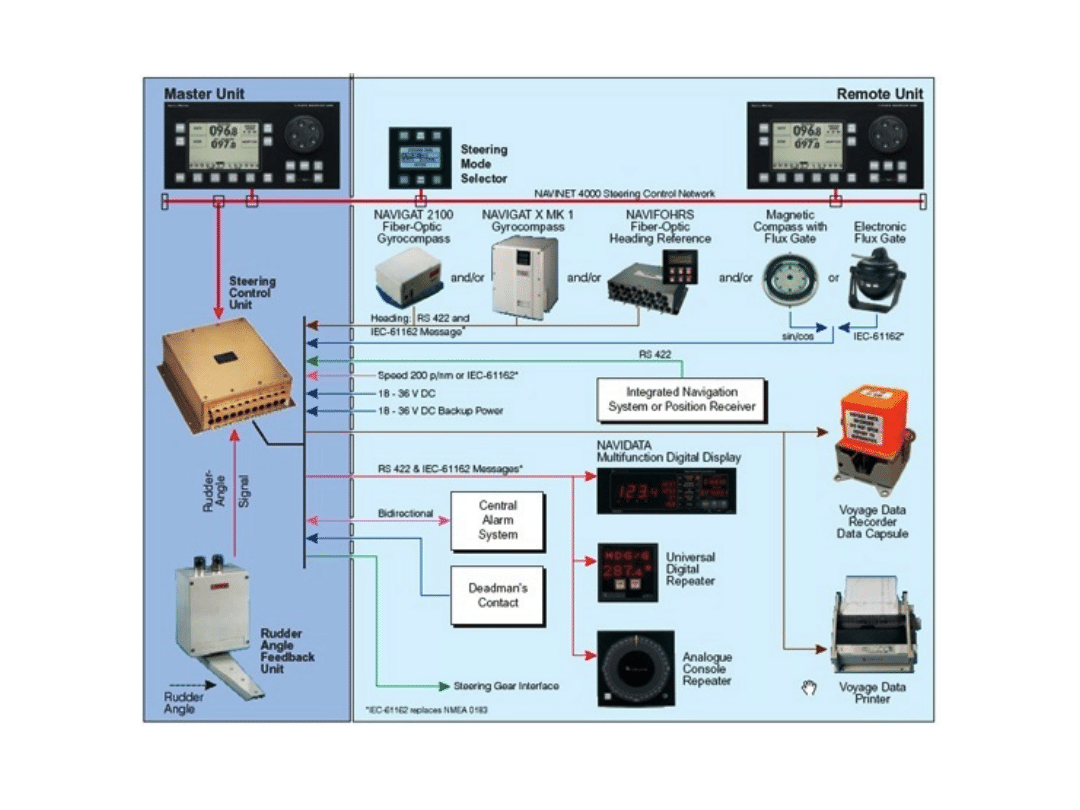
Autopilot adaptacyjny NAVIPILOT 4000, Sperry Marine
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XV_Sterowanie
adaptacyjne
20
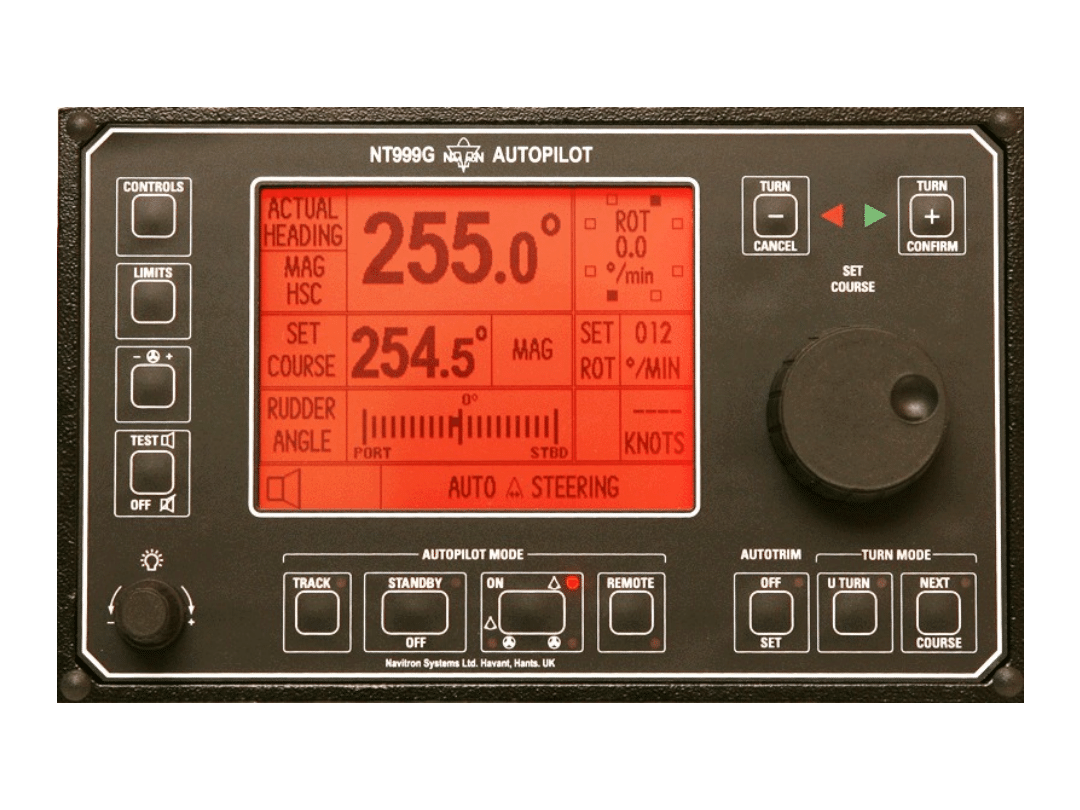
Autopilot adaptacyjny NT999G, Navitron Systems
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
Wyszukiwarka
Podobne podstrony:
UKŁADY STEROWANIA ADAPTACYJNEGO AC
Adaptacja przy wymianie sterownika silnika na używany
Adaptacja sterownika?U audi??r
Monitoring - adaptacja filmowa, Inżynieria Środowiska, mgr 2 semestr, Monitoring i sterowanie, wykła
[6n2] Adaptacja zdalnego sterowania do zamka centralnego
Adaptacja pilotów zdalnego sterowania
[6n2] Adaptacja zdalnego sterowania do zamka centralnego
Układy Napędowe oraz algorytmy sterowania w bioprotezach
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
Sterowce
ADAPTACJA I OBRONA
Gospodarka i sposoby adaptacji do Środowiska
WYKŁAD 02 SterowCyfrowe
08 BIOCHEMIA mechanizmy adaptac mikroor ANG 2id 7389 ppt
wykład 4 Sterowanie zapasami
adaptacja do wysiłku
więcej podobnych podstron