WYTRZYMAŁOŚĆ MATERIAŁÓW
prowadzący
prof. dr hab. inż. Kazimierz WÓJS
Wykład 15
Opracował
Andrzej Sitka
HIPOTEZY WYTĘŻENIA
HIPOTEZY WYTĘŻENIA
HIPOTEZY WYTĘŻENIA
W celu przeprowadzenia analizy teoretycznej stopnia
zagrożenia
elementów
wprowadza
się
pojęcie
wytężenia materiału
, czyli stopnia zbliżenia stanu
fizycznego
materiału
do
stanu
granicznego
(niebezpiecznego).
Konieczność
stosowania
odpowiednich kryteriów oceny możliwości zniszczenia
elementów
konstrukcji
wymaga
postawienia
stosownych hipotez –
hipotez wytężenia
.
HIPOTEZY WYTĘŻENIA
Hipotezy wytężenia w zależności od przyjętej miary
wytężenia dzielimy na:
- naprężeniowe,
- odkształceniowe,
- energetyczne,
- mieszane.
Pojęcia podstawowe
Załóżmy że pewien stan naprężenia (wyrażony
przez naprężenia główne) charakteryzuje stosunek:
(1)
c
b
a
:
:
:
:
3
2
1
Jeżeli naprężenia zwiększają się proporcjonalnie,
wytężenie zwiększa się również osiągając wartość
odpowiadającą granicy plastyczności, a następnie
wytrzymałości na rozciąganie.
Pojęcia podstawowe
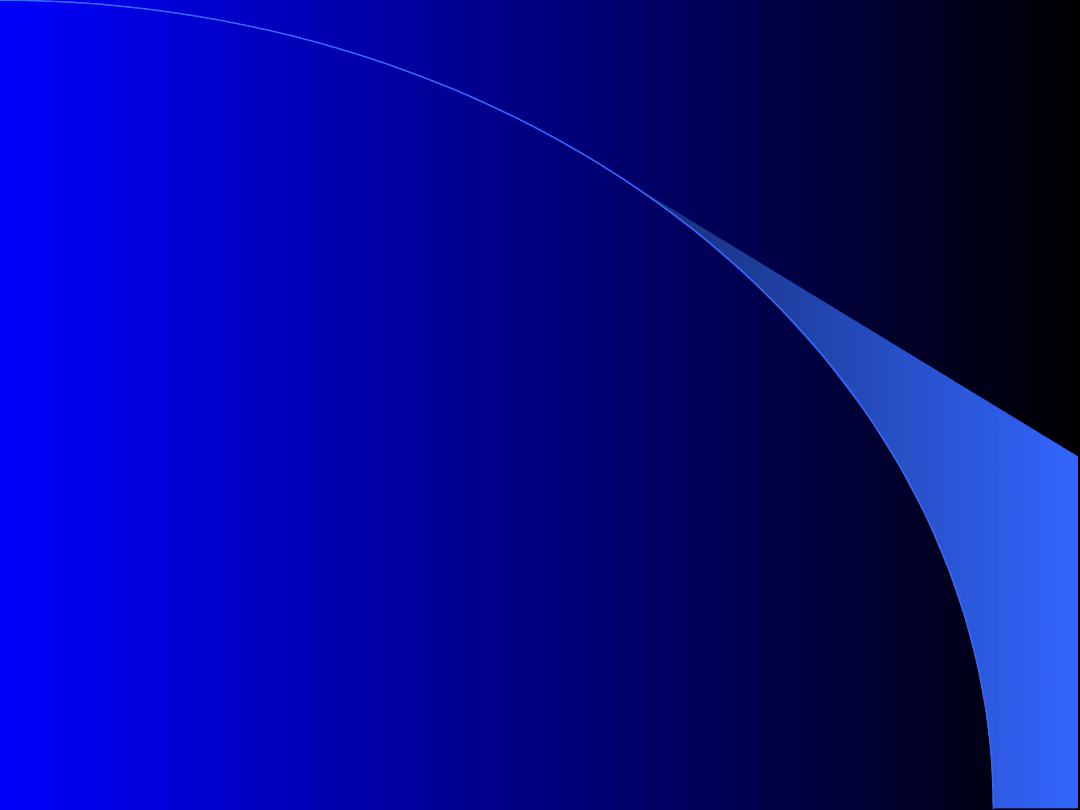
W układzie naprężeń głównych każdemu stanowi
naprężenia odpowiada punkt o współrzędnych:
1
np. punkt A na rys. 1 a więc przy założeniu
ciągłości związków zachodzących między wytężeniem
a stanem naprężenia, taki punkt określa również
wytężenie materiału odpowiadające danemu stanowi
naprężenia.
Pojęcia podstawowe
Rys. 1. Powierzchnie wytężenia odpowiadające wejściu
w stan plastyczny K
pl
i zniszczeniu K
z
Pojęcia podstawowe
Nieskończenie
wiele
takich
punktów,
to
powierzchnie wytężenia odpowiadające np. wejściu
materiału w stan plastyczny K
pl
lub zniszczeniu K
z
.
Taką powierzchnię w układzie naprężeń głównych
opisuje funkcja:
0
,
,
,
3
2
1
i
C
F
a w przypadku dowolnego stanu naprężenia:
0
,
,
,
,
,
,
i
zx
yz
xy
z
y
x
C
F
(2)
(3)
Parametry C
i
charakteryzują materiał.
Pojęcia podstawowe
Celem hipotez wytężenia
jest określenie
związku między wytężeniem W a składowymi stanu
naprężenia:
(4)
Krytyczne wartości wytężenia można wyznaczyć
przeprowadzając
doświadczenie
dla
jednego
określonego stanu naprężenia
0
, najlepiej dla
jednoosiowego rozciągania (np. punkt B, rys.1 )
(5)
i
zx
yz
xy
z
y
x
C
F
W
,
,
,
,
,
,
i
C
F
W
,
0
,
0
,
0
,
0
,
0
,
0
Pojęcia podstawowe
gdyż
krytyczne
wytężenie
dla
ogólnego
i
jednoosiowego stanu naprężenia jest równe:
(6)
Rozwiązując to równanie ze względu na
0
, otrzymamy:
i
i
zx
yz
xy
z
y
x
C
F
C
F
,
0
,
0
,
0
,
0
,
0
,
,
,
,
,
,
,
0
zx
yz
xy
z
y
x
f
,
,
,
,
,
0
(7)
Prawą stronę tego równania określimy jako naprężenie
redukowane
red
, a więc:
zx
yz
xy
z
y
x
red
f
,
,
,
,
,
(8)
Pojęcia podstawowe
Znając naprężenie niebezpieczne dla jednoosiowego
stanu naprężenia i uwzględniając, że
, można
wyznaczyć składowe dowolnego niebezpiecznego
stanu naprężenia.
red
0
Hipoteza największego
naprężenia rozciągającego
Według tej hipotezy miarą wytężenia jest
największe naprężenie rozciągające. Jest to
hipoteza
naprężeniowa
. Stosowana jest do mechaniki pękania.
Hipoteza największego
wydłużenia
Miarą wytężenia według tej hipotezy jest największe
wydłużenie
względne.
Jest
to
hipoteza
odkształceniowa
, którą w układzie odkształceń
głównych wyrazimy wzorami:
(9)
Za
przyjęto wydłużenie odpowiadające
wytrzymałości na rozciąganie R
m
.
kryt
1
kryt
2
kryt
3
kryt
Zr
Hipoteza największego
wydłużenia
Po zastosowaniu do zależności (9) uogólnionego prawa
Hooke’a otrzymamy:
(10)
kryt
3
2
1
kryt
1
3
2
kryt
2
1
3
Hipoteza największego
wydłużenia
Dla płaskiego stanu naprężeń
wzory
przyjmują postać:
0
,
0
,
0
3
2
1
kryt
2
1
kryt
1
2
kryt
2
1
(11)
Na rys. za
kryt
przyjęto R
m
(przypadek rozciągania).
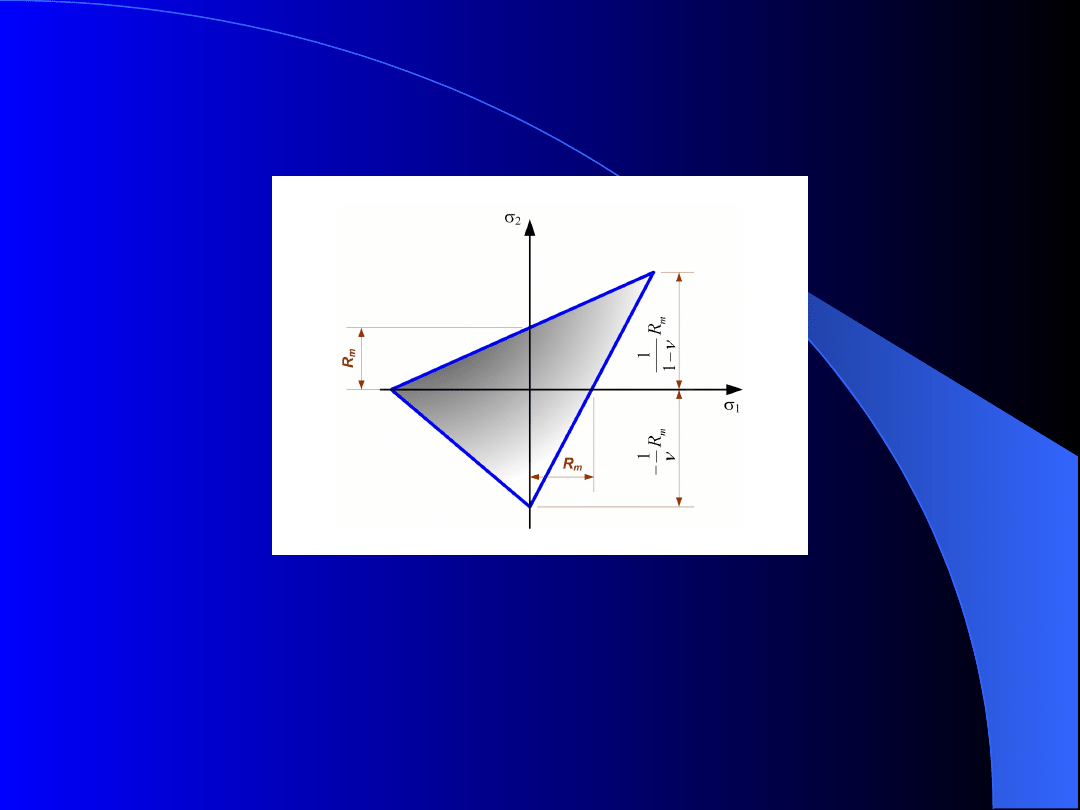
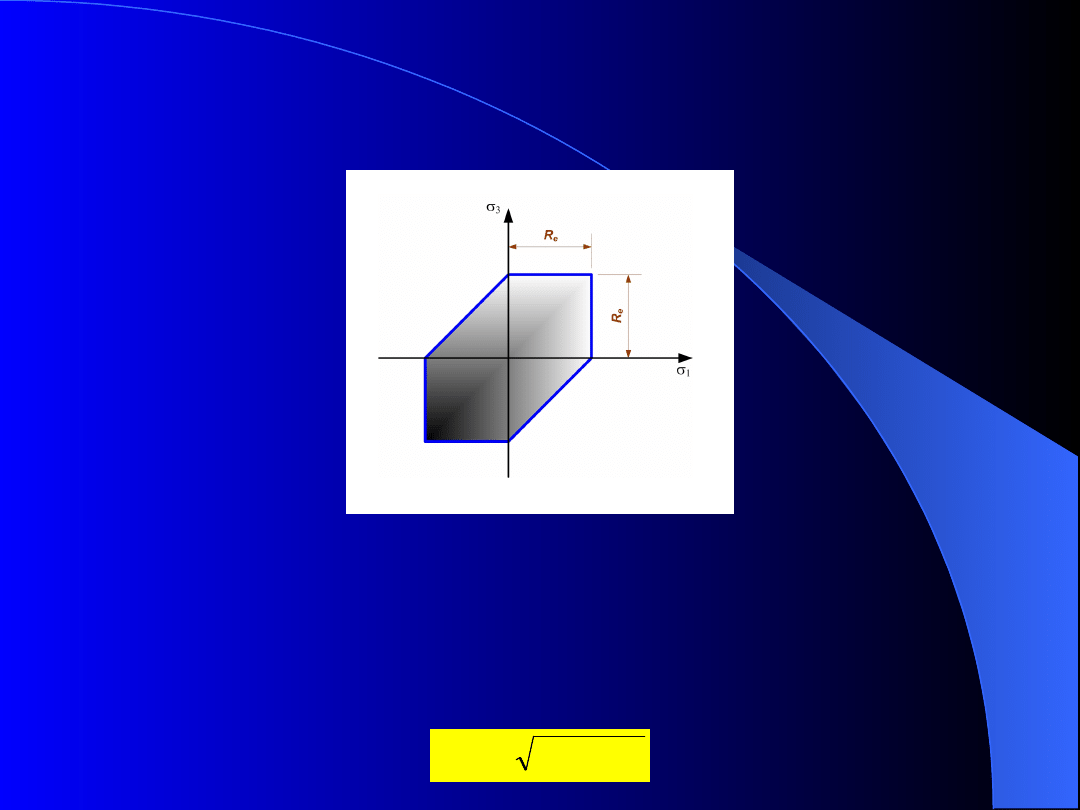
Hipoteza największego
wydłużenia
Rys. . Wykreślne odwzorowanie hipotezy największego
wydłużenia właściwego w układzie naprężeń głównych
Hipoteza największego
wydłużenia
W przypadku, gdy płaski stan naprężenia jest
wyrażony za pomocą naprężeń
to naprężenia
główne wyznacza się ze wzoru:
(1)
a naprężenia redukowane wyznaczymy z jednego z
trzech równań (11). Za naprężenia redukowane należy
przyjąć lewą stronę tego równania, która będzie
większa od lewej strony każdego z pozostałych dwóch
równań.
xy
y
x
,
,
2
2
2
,
1
4
2
1
2
1
xy
y
x
y
x
Hipoteza największego
wydłużenia
Jeśli
to wzór na naprężenie
redukowane przyjmie następującą postać:
xy
y
x
,
0
,
2
2
4
2
1
2
1
red
(1)
Przyjmując dla stali otrzymamy
(14)
3
,
0
2
2
4
65
,
0
35
,
0
red
Hipoteza największego
wydłużenia
Stosunek wartości bezwzględnych wytrzymałości
przy rozciąganiu R
m
do wytrzymałości przy ściskaniu
jest równy
(rys. ). Ogranicza to
stosowanie tej hipotezy do materiałów spełniających
ten warunek.
Rys. . Wykreślne odwzorowanie zmodyfikowanej
hipotezy Grashofa
m
R
1
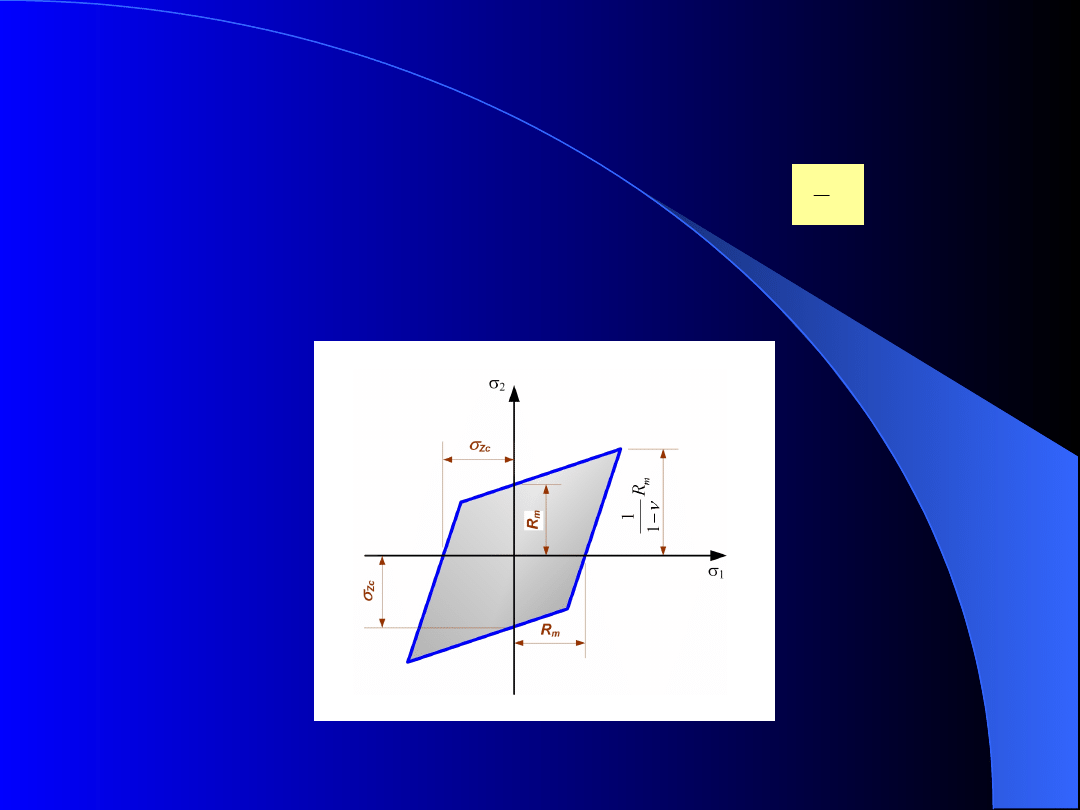
Hipoteza największego
wydłużenia
Modyfikacja tej hipotezy polega na przyjęciu
dodatkowego ograniczenia, aby żadne z głównych
odkształceń
liniowych
nie
było
mniejsze
od
odkształcenia
liniowego
Zc
,
odpowiadającego
wytrzymałości na ściskanie. Wykreślne odwzorowanie
tak zmodyfikowanej hipotezy dla płaskiego stanu
naprężenia, gdy |
Zc
|=|R
m
| pokazano na rys. .
Hipoteza największych
naprężeń stycznych
Miarą wytężenia tej hipotezy jest największe
naprężenie styczne. Jest to
hipoteza naprężeniowa
.
(15)
2
min
max
max
W przypadku prostego rozciągania , to równanie na
naprężenia redukowane ma postać:
(16)
kryt
red
min
max
bo:
(17)
0
red
W przypadku, gdy
i
, to równanie (16)
będzie miało następującą postać:
(18)
Hipoteza największych
naprężeń stycznych
1
max
3
min
kryt
red
3
1
Wykreślne odwzorowanie tej hipotezy dla materiałów o
jednakowej wartości granicy plastyczności podczas
rozciągania i ściskania w układzie naprężeń głównych
1
i
pokazano na rysunku 4.
Za
kryt
przyjęto R
e
.
W przypadku płaskiego stanu naprężenia, gdy:
x
=
y
=
0
xy
= naprężenia redukowane można
wyznaczyć:
(19)
Hipoteza największych
naprężeń stycznych
Rys. 4. Wykreślne odwzorowanie hipotezy największych
naprężeń stycznych w układzie naprężeń głównych
2
2
4
red
Za miarę wytężenia wg tej hipotezy przyjmuje się
energię właściwą odkształcenia postaciowego, która w
dowolnym przestrzennym stanie naprężenia wynosi:
Hipoteza energii właściwej
odkształcenia postaciowego
(hipoteza Hubera)
2
2
2
2
2
2
6
6
1
zx
yz
xy
x
z
z
y
y
x
E
(0)
W jednoosiowym stanie naprężenia energia właściwa
odkształcenia postaciowego będzie:
(1)
2
0
2
6
1
E
Porównując równania (0) i (1) wyznaczymy
naprężenie redukowane z zależności:
()
Naprężenie
redukowane
w
układzie
naprężeń
głównych można wyznaczyć z równania:
Hipoteza energii właściwej
odkształcenia postaciowego
(hipoteza Hubera)
2
2
2
2
2
2
6
2
1
zx
yz
xy
x
z
z
y
y
x
red
2
1
3
2
3
2
2
2
1
2
1
red
()
Wykreślnym odwzorowaniem tej hipotezy w
układzie naprężeń głównych jest walec kołowy
jednakowo nachylony do osi σ
1
, σ
, σ
, a śladem tego
walca w płaskim układzie naprężeń σ
1
, σ
jest elipsa
(rys.5).
W elipsę jest wpisane wykreślne odwzorowanie
hipotezy największych naprężeń stycznych.
Hipoteza energii właściwej
odkształcenia postaciowego
(hipoteza Hubera)
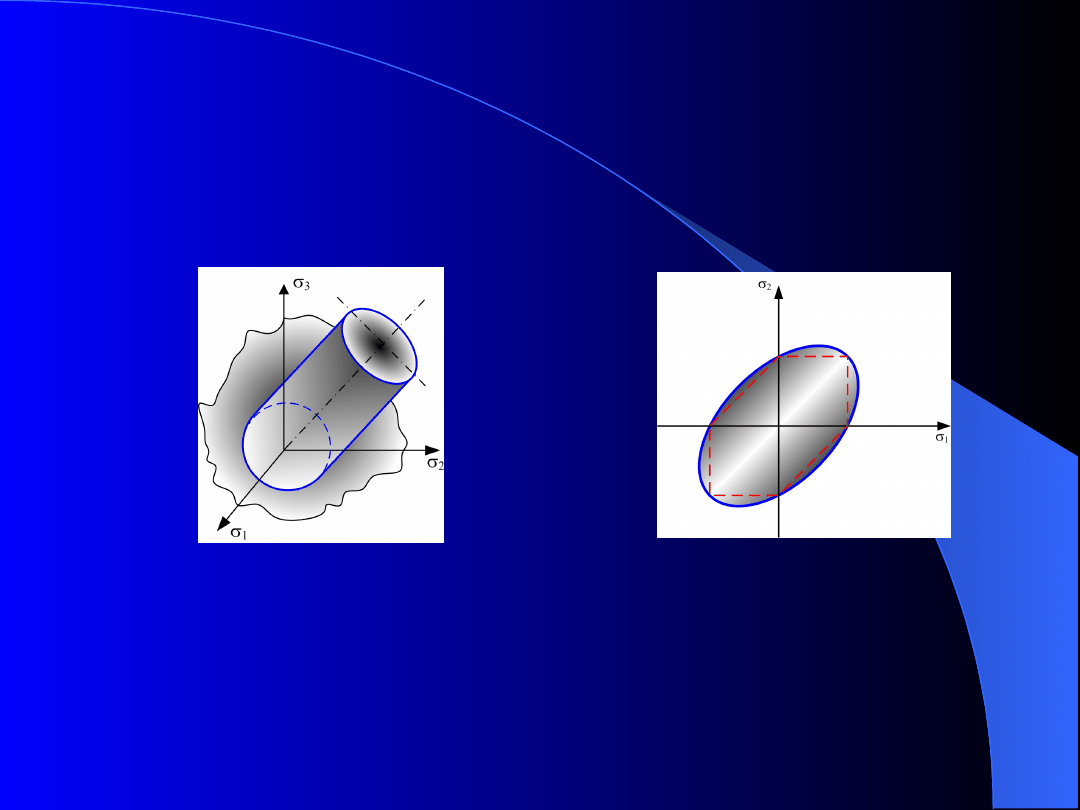
Rys. 5. Wykreślne odwzorowanie hipotezy Hubera; a) w
przestrzennym stanie naprężenia, b) w płaskim stanie
naprężenia
Hipoteza energii właściwej
odkształcenia postaciowego
(hipoteza Hubera)
a
)
b)
Dla płaskiego stanu naprężenia σ
x
, σ
y
, τ
xy
naprężenia
redukowane wyraża równanie:
(4)
Hipoteza energii właściwej
odkształcenia postaciowego
(hipoteza Hubera)
2
2
3
y
x
red
xy
y
x
,
0
,
Jeśli
to wzór na naprężenie
redukowane przyjmie następującą postać:
(5)
2
2
3
red
Hipotezy
energii
właściwej
odkształcenia
postaciowego i największych naprężeń stosuje się do
określenia stanów granicznych przejścia materiału w
stan plastyczny (kryterium plastyczności). Hipotezy
odkształceń i największego naprężenia normalnego są
stosowane dla złomu rozdzielczego oraz kruchego.
Przykłady stosowania hipotez
wytężenia
Zastosowanie hipotez wytężenia można pokazać
na przykładach:
•
rozciąganie ze skręcaniem,
•
zginanie ze skręcaniem.
Dla prętów o przekroju kołowym w tych przypadkach
występują tylko naprężenia i , a więc naprężenia
redukowane można wyznaczyć z hipotezy Hubera.
Przykłady stosowania hipotez
wytężenia
Naprężenia normalne pochodzące od rozciągania:
Rozciąganie ze skręcaniem
A
N
(6)
Naprężenia styczne pochodzące od skręcania:
(7)
0
max
W
M
s
Niebezpiecznym miejscem przekroju jest to, w którym
naprężenie styczne jest maksymalne (warstwa
wierzchnia).
Naprężenia redukowane wyznaczamy z hipotezy
Hubera :
Rozciąganie ze skręcaniem
(8)
2
2
3
red
2
0
2
3
W
M
A
N
s
red
Naprężenie normalne pochodzące od zginania:
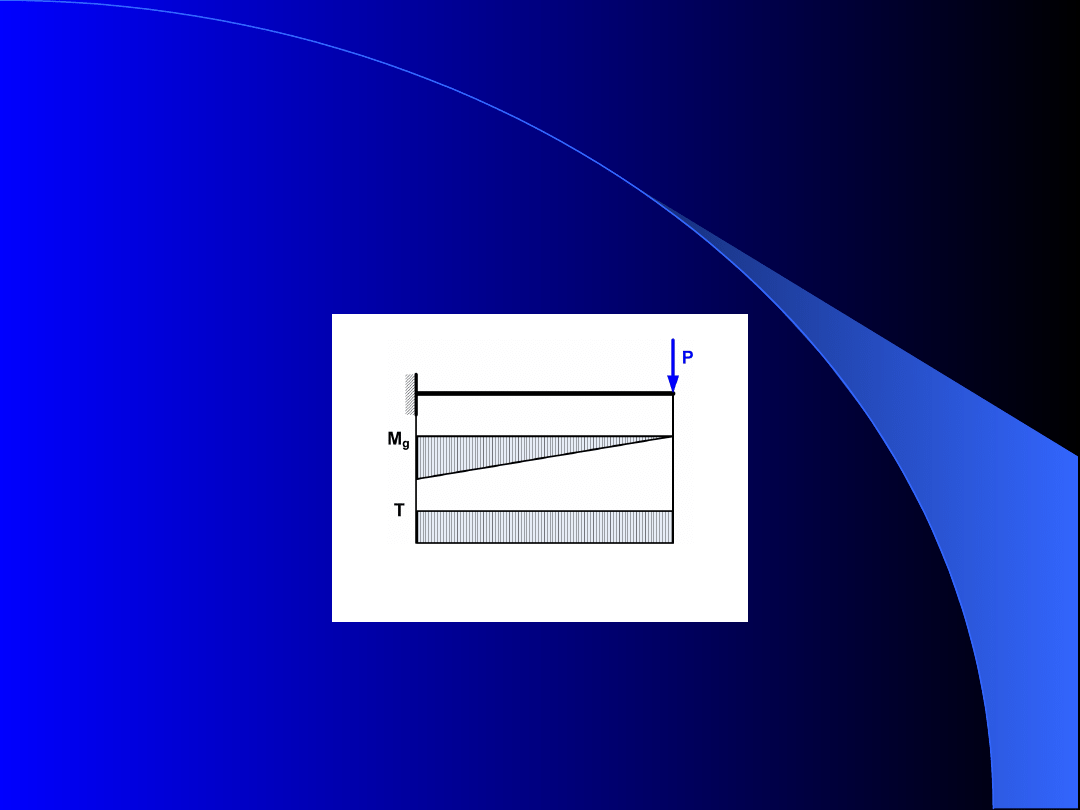
Zginanie ze skręcaniem
(9)
(0)
Niebezpiecznym miejscem przekroju są punkty
najbardziej odległe od środka, w których naprężenia są
ekstremalne.
Naprężenie redukowane wyznaczymy z hipotezy
Hubera :
W
M
g
max
2
2
3
red
2
0
2
3
W
M
W
M
s
g
red
ale:
Zginanie ze skręcaniem
(1)
()
Równanie na naprężenia redukowane w przypadku
skręcania ze zginaniem można przedstawić również w
postaci:
32
2
2
16
3
3
0
d
W
d
W
więc:
W
M
M
W
M
W
M
s
g
s
g
red
2
2
2
0
2
75
,
0
3
()
W
M
red
red
w którym:
2
2
4
3
s
g
red
M
M
M
(4)
ZŁOŻONE
ZŁOŻONE
ZAGADNIENIA
ZAGADNIENIA
ZGINANIA
ZGINANIA
Zbadajmy
przypadek
zginania
belki
siłą
poprzeczną i wyznaczmy rozkład naprężeń stycznych
w przekroju poprzecznym belki, a także przypadki, w
których działają jednocześnie składowe naprężeń
(normalne do przekroju poprzecznego) wywołane
działaniem sił i momentów.
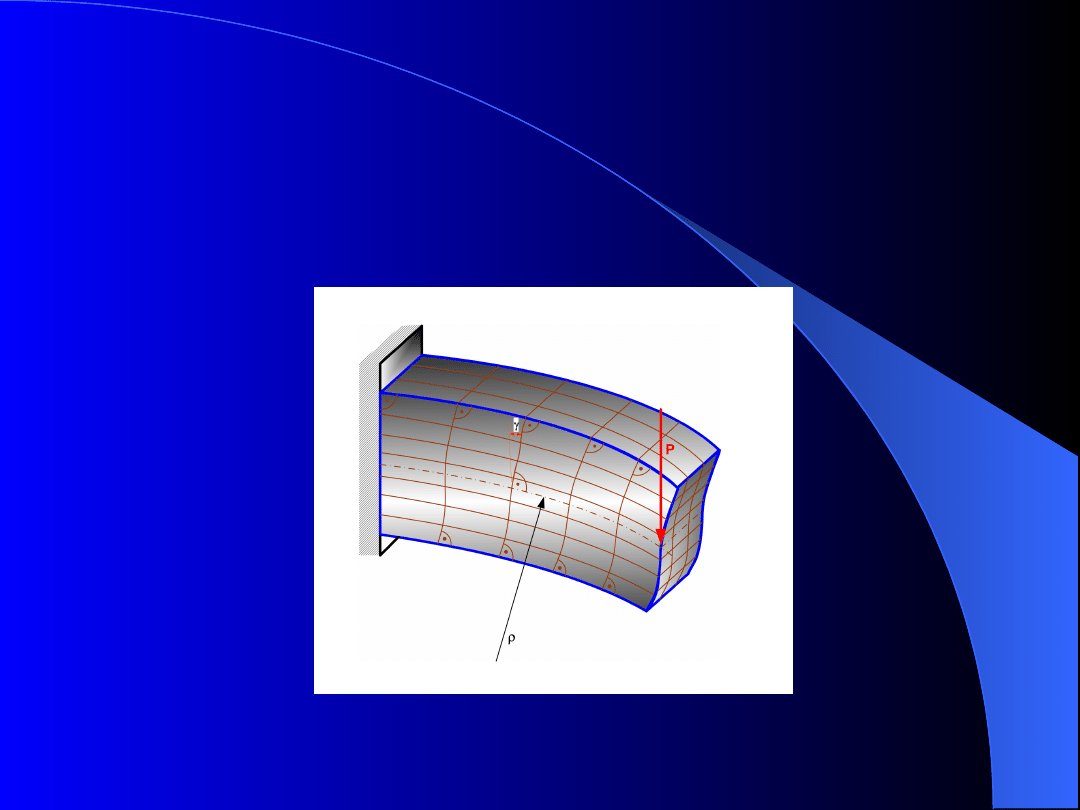
NAPRĘŻENIA PRZY ZGINANIU
SIŁĄ POPRZECZNĄ
Taki przypadek pokazano na rys. 1. Belka jest
obciążona momentem gnącym M
g
i siłą tnącą T.
NAPRĘŻENIA PRZY ZGINANIU
SIŁĄ POPRZECZNĄ
Rys. 1. Zginanie belki siłą poprzeczną
Na powierzchni bocznej belki zginanej siłą poprzeczną
narysujemy linie równoległe oraz prostopadłe do osi
belki (rys. ).
NAPRĘŻENIA PRZY ZGINANIU
SIŁĄ POPRZECZNĄ
Rys. . Obraz linii pierwotnie równoległych i
prostopadłych do osi belki po odkształceniu
Działanie naprężeń stycznych oraz zmiana wartości
naprężeń normalnych wzdłuż osi belki, wywołane
zmianą wartości momentu gnącego, powodują
powstanie różnic w obrazie odkształceń belki w
stosunku do obrazu odkształceń w belce poddanej
zginaniu czystemu.
Różnice te są następujące:
•
Kąty między bokami odkształconej siatki nie są
na ogół proste. Największe zmiany występują w
warstwach bliższych osi belki, a w warstwach
skrajnych są tak małe, że można je pominąć.
•
Naprężenia
styczne
są
rozłożone
nierównomiernie w przekroju belki.
NAPRĘŻENIA PRZY ZGINANIU
SIŁĄ POPRZECZNĄ
Rozpatrzmy przypadek zginania siłą poprzeczną
nie przyjmując żadnego uproszczenia.
Wytnijmy z belki element o długości dx. Działanie
odrzuconych części belki wyrażają siły wewnętrzne
jak na rys. .
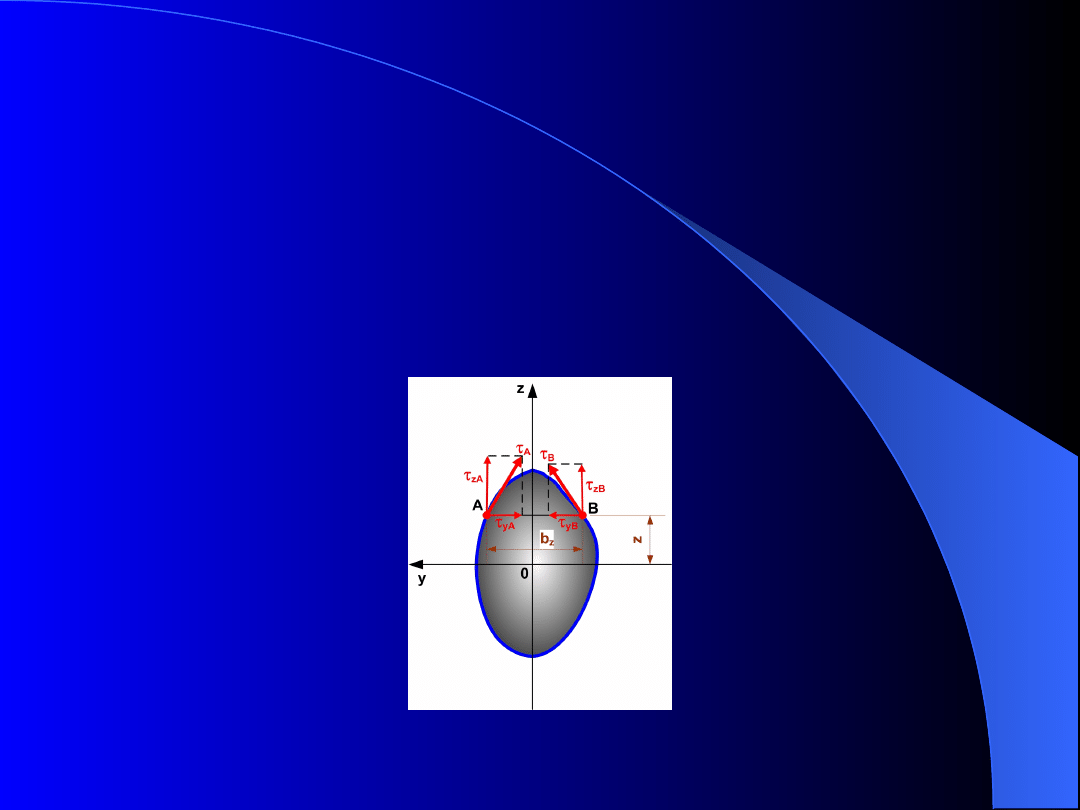
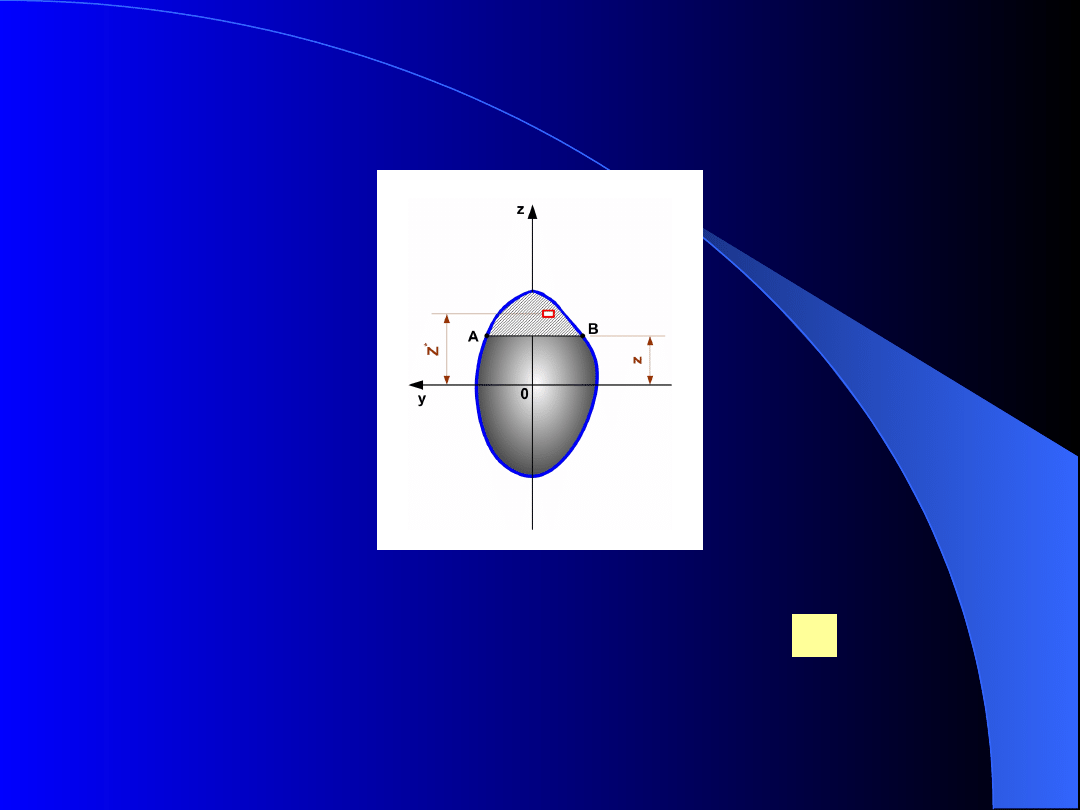
Kierunki naprężeń
A
i
B
w punktach A i B są styczne do
konturu. W naprężenia w innych punktach mają inne
kierunki (np. punkt C), a więc nie są równoległe do osi
z.
Analiza rozkładu naprężeń
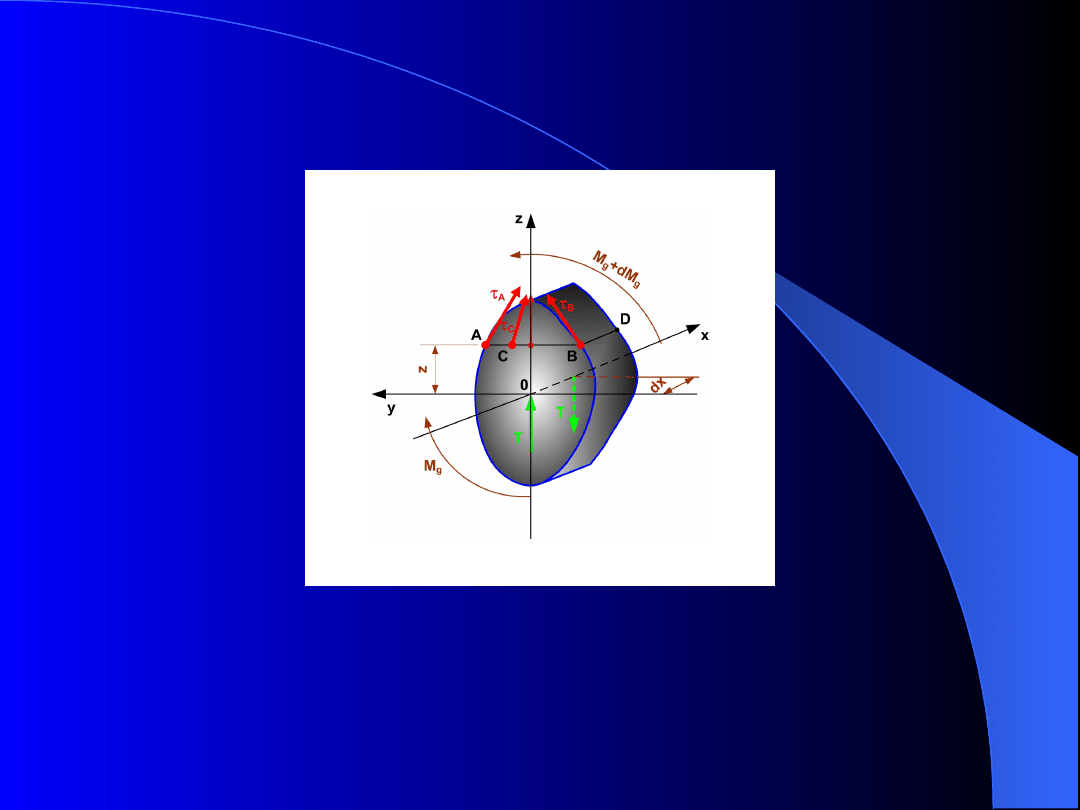
Analiza rozkładu naprężeń
Rys. . Element belki o długości dx w równowadze
Rozłóżmy naprężenia na składowe równoległe do
osi y i do osi z (rys. 4). W kolejnym przybliżeniu
(pastowanym w tej analizie) składowe naprężeń w
płaszczyźnie yz na linii AB równoległe do osi z
zastąpimy naprężeniami średnimi
zśr
.
Analiza rozkładu naprężeń
Rys. 4. Rozkład naprężeń
A
i
B
na składowe
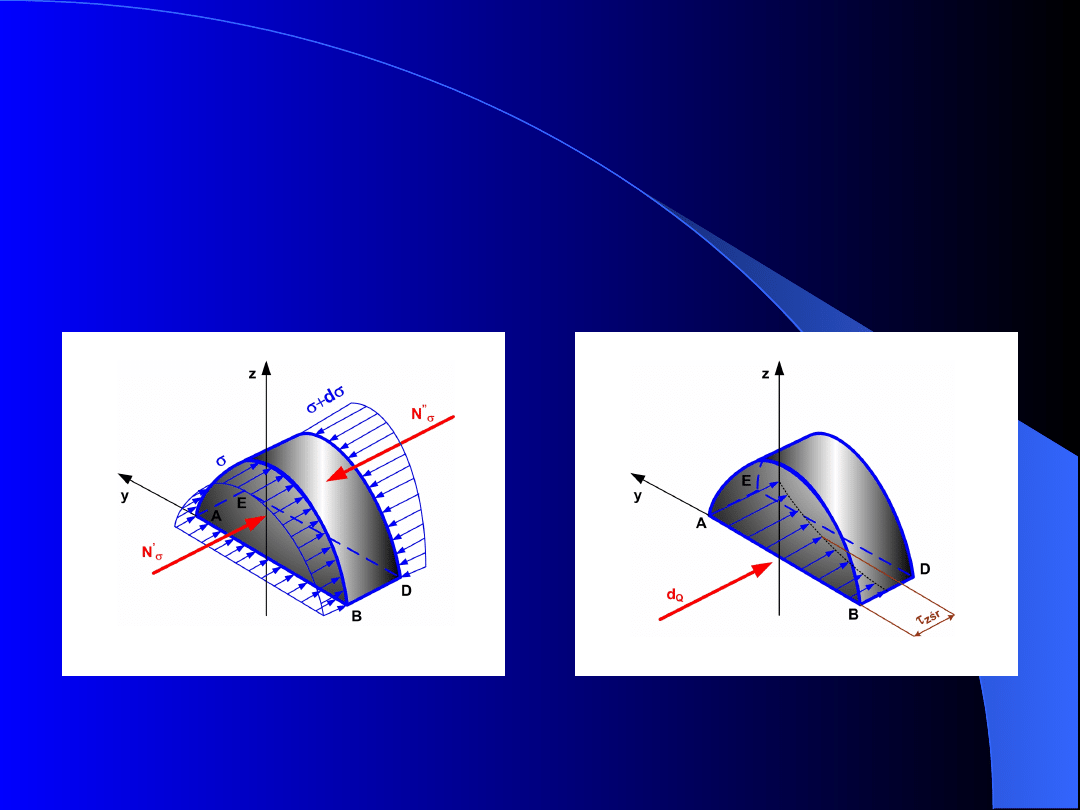
Odrzućmy
dolną
część
elementu
poniżej
płaszczyzny ABDE i rozpatrzmy równowagę górnej
części
elementu
z
uwzględnieniem
naprężeń
normalnych, wywołujących zginanie (rys. 5a) i
stycznych (rys. 5b)
Warunki równowagi
Rys. 5. Równowaga elementu belki; a) naprężenia
normalne, b) naprężenia styczne
Warunki równowagi
Na górną część elementu działają następujące siły
równoległe do osi x:
(1)
AB
dA
N
'
AB
dA
d
N
''
()
dx
b
dQ
z
śr
z
()
gdzie:
τ
zśr
– średnia wartość naprężeń stycznych w
płaszczyźnie ABDE
Po podstawieniu do wzoru (1) zależność na naprężenia
σ:
Warunki równowagi
(4)
(5)
*
z
I
M
y
g
gdzie:
z
*
- odległość wektora σdA od płaszczyzny obojętnej
otrzymamy:
y
z
y
g
AB
y
g
AB
y
g
AB
I
S
M
dA
z
I
M
dA
z
I
M
dA
N
)
(
*
*
'
gdyż
Warunki równowagi
)
(
*
z
y
AB
S
dA
z
(6)
- moment statyczny (względem osi obojętnej)
części powierzchni przekroju poprzecznego ponad linią
AB (część zakreskowana na rys. 6).
)
(z
y
S
Warunki równowagi
Rys.6. Część powierzchni przekroju poprzecznego
elementu, dla którego wyznacza się moment statyczny
)
(z
y
S
Ze wzoru ()
otrzymamy:
Warunki równowagi
(7)
(9)
AB
dA
d
N
''
y
z
y
g
g
I
S
dM
M
N
)
(
''
Warunek równowagi sił w kierunku osi x można zapisać
w postaci:
(8)
0
''
'
dQ
N
N
X
Po podstawieniu zależności (), (5) i (7) do wzoru (8) i
po wykonaniu obliczeń otrzymamy wzór do obliczenia
naprężeń stycznych w belkach zginanych siłami
poprzecznymi:
y
z
y
g
z
śr
z
I
S
dx
dM
b
)
(
Uwzględniając twierdzenie Schwedlera:
Warunki równowagi
dx
dM
T
g
(10)
otrzymamy ostatecznie:
(11)
z
y
z
y
śr
z
b
I
S
T
)
(
Warunki równowagi
Z analizy powyższego wzoru wynika, że jeśli
położenie płaszczyzny ABDE przyjmiemy w górnym
skrajnym położeniu, to moment statyczny części
elementu ponad tą płaszczyzną będzie równy zeru:
(1)
0
)
(
z
y
S
a więc naprężenia w tej płaszczyźnie będą równe zeru
(
Z
=0). Największe naprężenia styczne wystąpią w
płaszczyźnie środkowej belki, czyli w płaszczyźnie
obojętnej, w której naprężenia od zginania są równe
zeru.
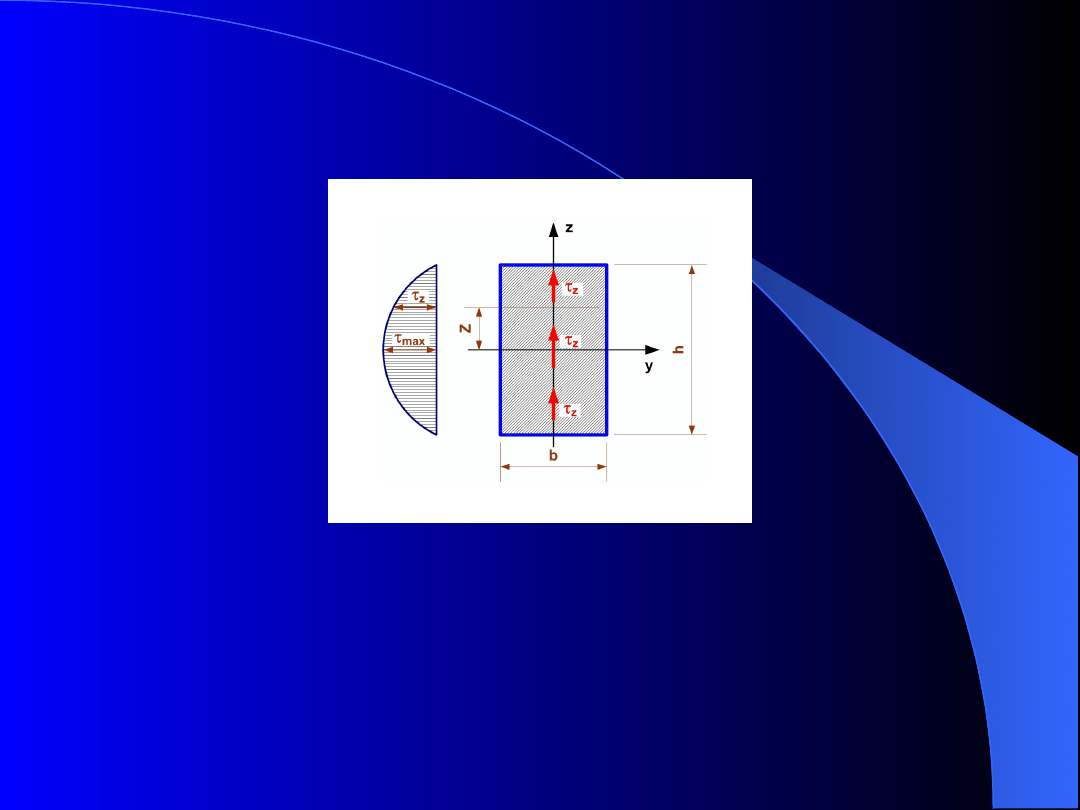
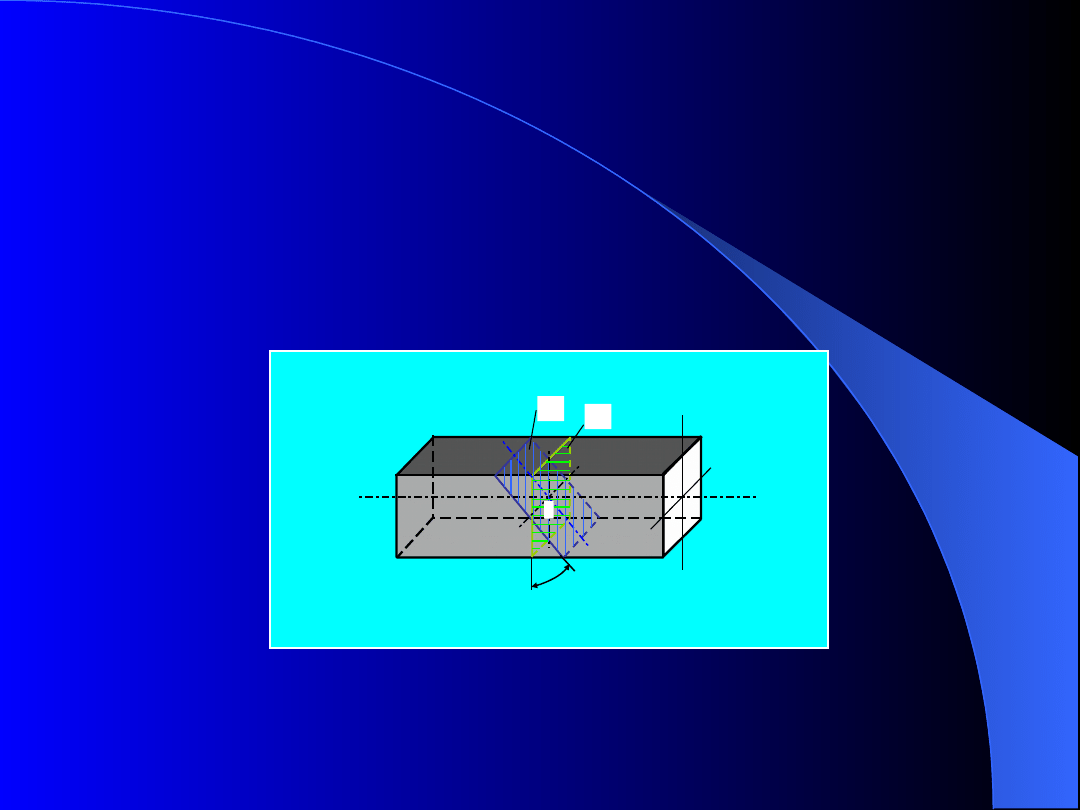
Warunki równowagi
Rys. 7. Rozkład naprężeń stycznych w belce o przekroju
poprzecznym prostokątnym zginanej siłą poprzeczną
WYBOCZENIE
Analiza zachowania pręta smukłego poddanego
działaniu sił ściskających
Smukłość
jest to stosunek długości pręta do
promienia bezwładności jego przekroju poprzecznego.
Każde ciało jest narażone na działanie różnych
czynników zewnętrznych, które mogą to ciało
wyprowadzić ze stanu równowagi. Takimi czynnikami
może być małe odstępstwo od osiowości obciążenia. W
przypadku ściskania prętów smukłych czynniki te w
sposób istotny mogą być przyczyną przejścia z
jednego położenia równowagi do innego położenia
równowagi.
WYBOCZENIE
Jeśli stan równowagi takiego pręta jest trwały, to
po ustaniu działania takich czynników pręt wraca do
pierwotnego położenia równowagi. W przypadku
równowagi chwiejnej, to nawet po ustaniu działania
bodźców chwilowych pręt nie powróci do stanu
pierwotnego, przejdzie natomiast do nowej postaci
równowagi. Nowa postać równowagi może być równa
zniszczeniu konstrukcji. Jest to zjawisko
wyboczenia
pręta
.
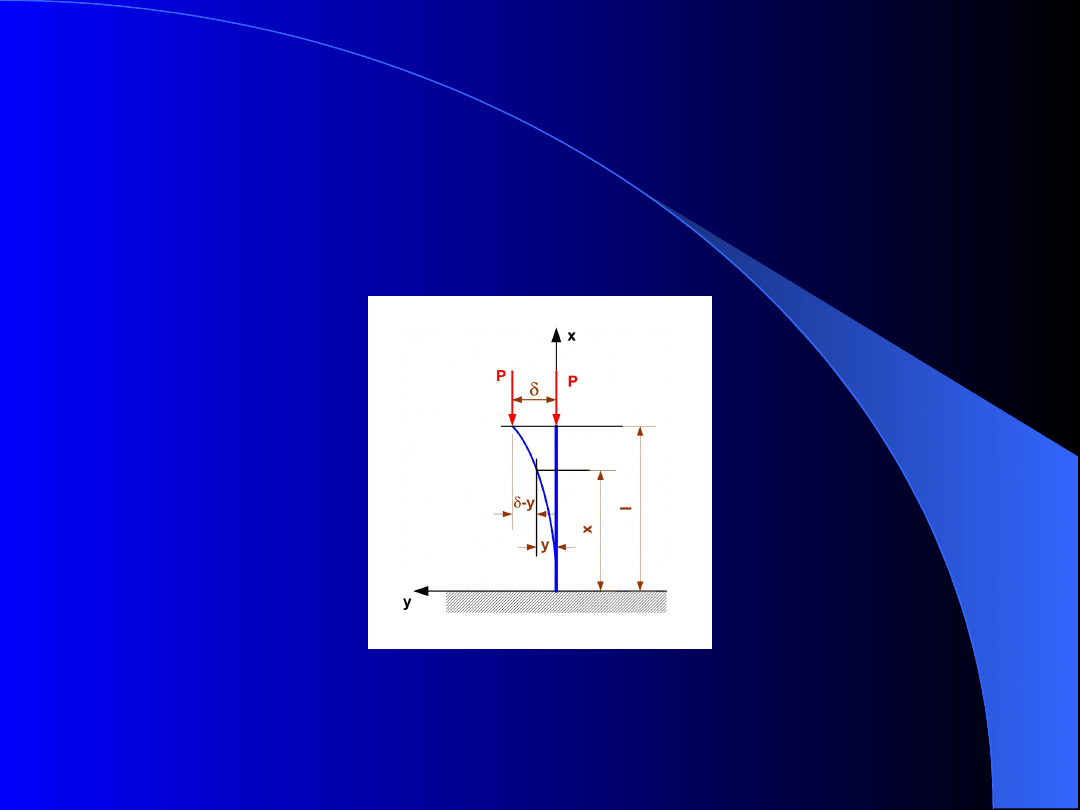
Sprężyste wyboczenie pręta
Rozpatrzmy smukły pręt utwierdzony w jednym
końcu i obciążony w drugim (swobodnym) końcu
siłą ściskającą (rys. 8).
Rys. 8. Pręt smukły obciążony siłą osiową
Sprężyste wyboczenie pręta
Należy wyznaczyć siłę krytyczną dla pręta
ściskanego, czyli określić warunki konieczne dla
zachowania równowagi tego pręta w postaci wygiętej
w zakresie sprężystości materiału.
Wyboczenie nastąpi w płaszczyźnie najmniejszej
sztywności zginania EI, w której promień bezwładności
przekroju poprzecznego jest najmniejszy.
Sprężyste wyboczenie pręta
W nowym stanie równowagi w postaci wygiętej w
pręcie pojawi się moment gnący oprócz siły podłużnej
(ściskającej). Moment ten w dowolnym przekroju
odległym o x od początku układu współrzędnych x,y
będzie:
(1)
Podstawiając ten wzór do zależności:
y
P
M
g
(14)
g
M
dx
y
d
EI
2
2
Sprężyste wyboczenie pręta
otrzymamy równanie różniczkowe linii ugięcia:
(15)
y
P
dx
y
d
EI
2
2
a po przekształceniu:
(16)
0
2
2
P
Py
dx
y
d
EI
Podstawiając za:
(17)
EI
P
k
2
otrzymamy równanie:
(18)
0
2
2
2
2
k
y
k
dx
y
d
Sprężyste wyboczenie pręta
Rozwiązanie tego równania ma postać:
(19)
(0)
Stałe
całkowania
wyznaczymy
z
warunków
brzegowych,
dla x=0 mamy y=0 oraz dy/dx=0, a więc:
(1)
x
k
B
x
k
A
y
sin
cos
A
0
B
()
Równanie różniczkowe linii ugięcia ma więc postać
cosinusoidy:
x
k
y
cos
1
Sprężyste wyboczenie pręta
Warunek określający wielkość k w stanie nowej
krzywoliniowej równowagi pręta, a więc w stanie
krytycznym wyniknie z równania:
l
k
y
l
x
cos
1
)
(
()
Będzie to spełnione dla:
(4)
0
cos
l
k
Równanie (4) będzie spełnione gdy:
(5)
2
1
2
n
l
k
Sprężyste wyboczenie pręta
oraz n = 1, 2, 3, 4.....
(6)
Po podstawieniu do równania (5) wyrażenia na k w
stanie krytycznym otrzymamy:
l
n
EI
P
k
kryt
2
1
2
(7)
a najmniejszą wartość siły krytycznej (dla n=0)
wyznaczymy z zależności:
2
2
4l
EI
P
kryt
Jest to
wzór Eulera
do obliczania siły krytycznej w
zakresie sprężystości materiału. Jest słuszny dla pręta
utwierdzonego jednym końcem i obciążonego siła
ściskającą w końcu swobodnym.
Sprężyste wyboczenie pręta
Uniezależniając obliczenia od sposobu zamocowania
pręta (od warunków brzegowych) należy wprowadzić
pojęcie długości redukowanej l
red
. Wielkość tę określa
wzór:
(8)
Współczynnik zależy od warunków brzegowych
pręta, a jego wartość dla czterech najbardziej
typowych sposobów zamocowania pokazano na rys. 9.
l
l
red
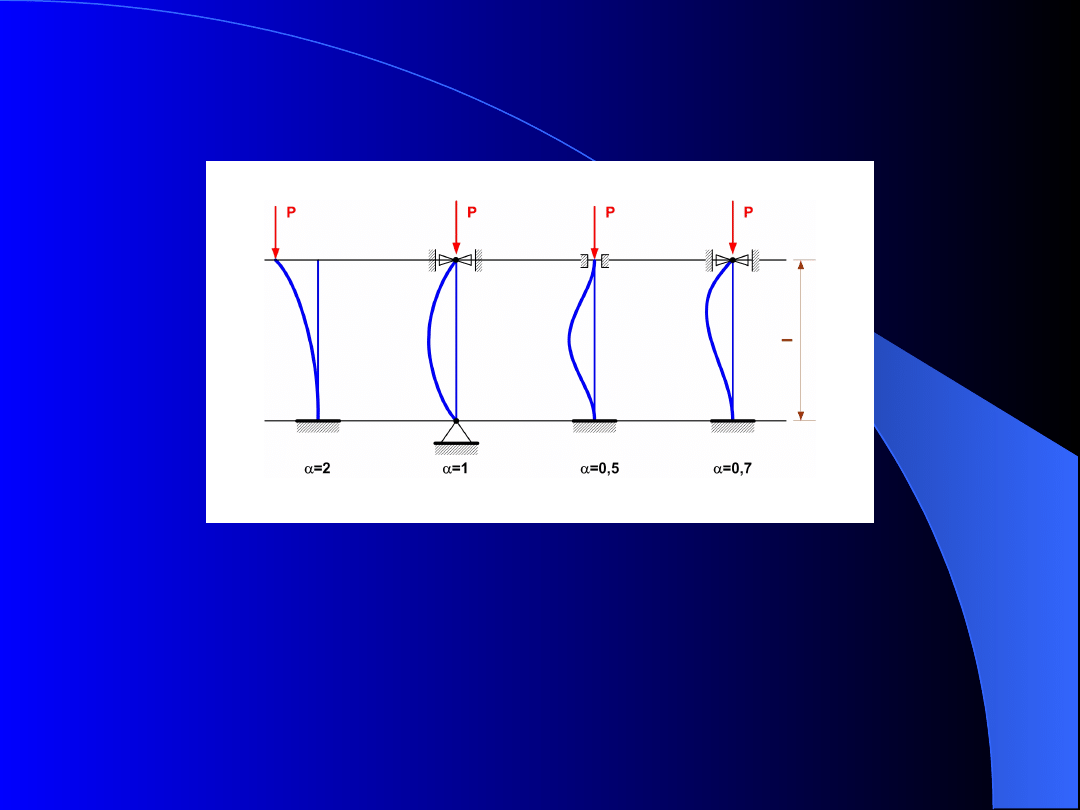
Sprężyste wyboczenie pręta
Rys. 9. Przypadki zamocowania pręta
Wzór Eulera z uwzględnieniem pojęcia długości
redukowanej ma postać:
(9)
Sprężyste wyboczenie pręta
2
2
red
kryt
l
EI
P
Dzieląc obustronnie równanie (9) przez przekrój
poprzeczny A
0
pręta otrzymamy równanie do
obliczenia naprężenia krytycznego:
(0)
2
0
2
red
kryt
l
A
EI
Za
- jest to kwadrat promienia bezwładności
przekroju poprzecznego. Po uwzględnieniu tej wielkości
i równania na smukłość pręta
(1)
Sprężyste wyboczenie pręta
otrzymamy równanie Eulera do obliczania naprężenia
krytycznego w postaci:
()
2
0
i
A
I
min
i
l
red
2
2
E
kryt
Jest to hiperboliczna zależność naprężenia krytycznego
od smukłości pręta ściskanego.
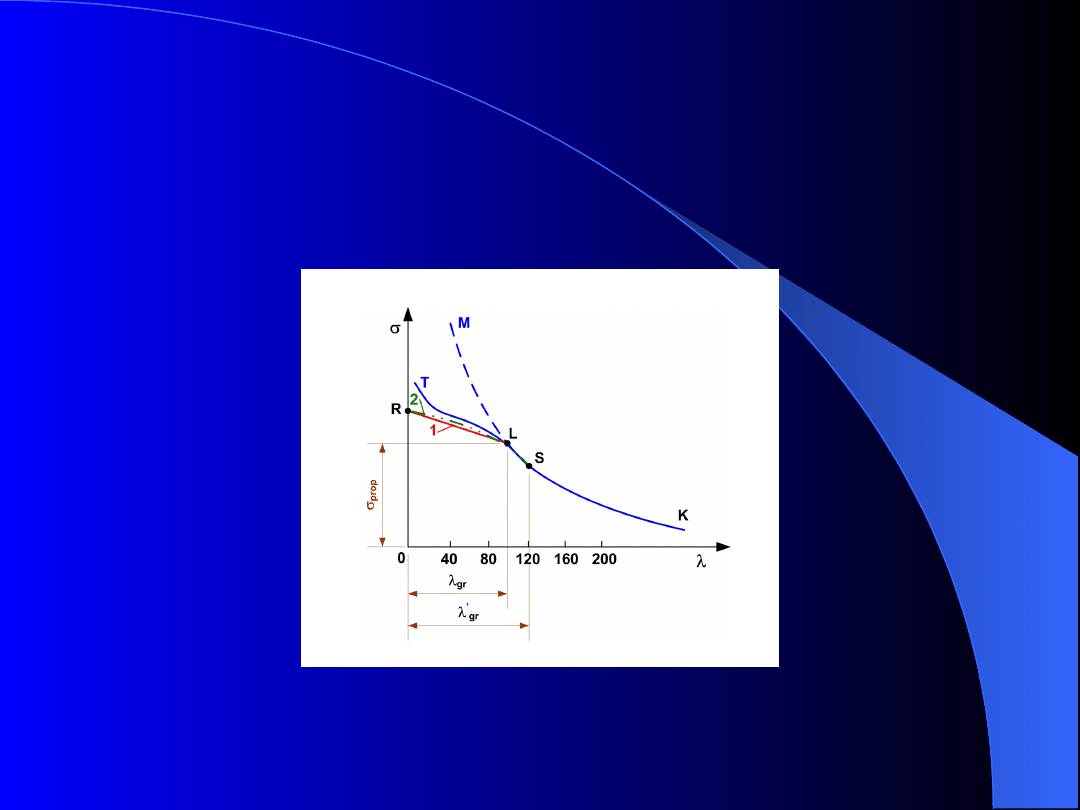
Hiperbolę Eulera w układzie współrzędnych
kryt
,
pokazano na rys.10.
Wyboczenie poza zakresem
sprężystości materiału
Rys. 10. Hiperbola Eulera KLM i zależności
doświadczalne: 1 – prosta Tetmajera – Jasińskiego, –
parabola Johnsona – Ostenfelda
Porównanie hiperboli Eulera z wynikami doświadczeń
(linia KLT) wykazało, że równanie Eulera odpowiada
tym wynikom tylko wtedy, gdy smukłość przekracza
pewną wartość – zwaną smukłością graniczną
gr
.
Wyznaczymy ją podstawiając do równania Eulera
wartość
granicy
proporcjonalności
w
miejsce
naprężenia krytycznego (np. Dla stali:
prop
=00 MPa)
oraz modułu Younga E=10
5
MPa:
Wyboczenie poza zakresem
sprężystości materiału
100
200
10
2
10
5
2
prop
gr
E
()
W zakresie smukłości mniejszej niż smukłość
graniczna, a więc poza zakresem sprężystości
(proporcjonalności) stosuje się wzory doświadczalne:
Wyboczenie poza zakresem
sprężystości materiału
(4)
Tetmajera-Jasińskiego
(prosta LR):
b
a
kryt
(5)
Johnsona-Ostenfelda
(parabola SR)
B
A
kryt
w których a, b, A, B – stałe materiałowe.
Stałe materiałowe a, b wyznaczymy przyjmując, że dla
=0 (punkt R – rys. 10)
kryt
=R
e
. Podstawiając te
wartości do równania (4) otrzymamy:
Wyboczenie poza zakresem
sprężystości materiału
(6)
(8)
e
kryt
R
b
a
0
a stąd:
(7)
e
R
a
Dla =
gr
(punkt L – rys. 10)
kryt
=
prop
. Podstawiając tę
wartość do równania (4) i wykorzystując równanie
() i (7) otrzymamy:
prop
prop
e
gr
prop
e
E
R
R
b
2
Wierzchołkiem paraboli (5) jest punkt R (rys. 10) o
współrzędnych =0 i
kryt
=R
e
. Podstawiając tą wartość
do równania (5) otrzymamy:
Wyboczenie poza zakresem
sprężystości materiału
(9)
Parabola jest styczna do hiperboli Eulera, a w punkcie
styczności mamy
(40)
e
R
A
'
gr
to można napisać:
(41)
hiperb
kryt
parab
kryt
d
d
d
d
Po podstawieniu do równania (41) zależności (5)
i ()
i po zróżniczkowaniu
otrzymamy:
Wyboczenie poza zakresem
sprężystości materiału
(4)
W punkcie S dla
’
gr
naprężenie
kryt
obliczone wg
równania (5) musi być takie samo jak obliczone ze
wzoru (), a więc:
(4)
B
A
kryt
2
2
E
kryt
4
'
2
gr
E
B
2
'
2
2
'
4
'
2
gr
gr
gr
e
E
E
R
Stąd otrzymamy:
Wyboczenie poza zakresem
sprężystości materiału
(44)
Równanie (4) można zapisać w postaci:
(45)
e
gr
R
E
2
'
2
2
'
2
2
'
gr
gr
e
E
B
R
i podstawiając do tego równania zależność (44)
otrzymamy:
(46)
E
R
B
e
2
2
4
WYTRZYMAŁOŚĆ
MATERIAŁÓW
prowadzący
prof. dr hab. inż. Kazimierz WÓJS
Wykład 15b
Opracował
Andrzej Sitka
ANALIZA STANU NAPRĘŻE
ANALIZA STANU NAPRĘŻE
Ń
Ń
Analiza stanu napręże
Analiza stanu napręże
ń
ń
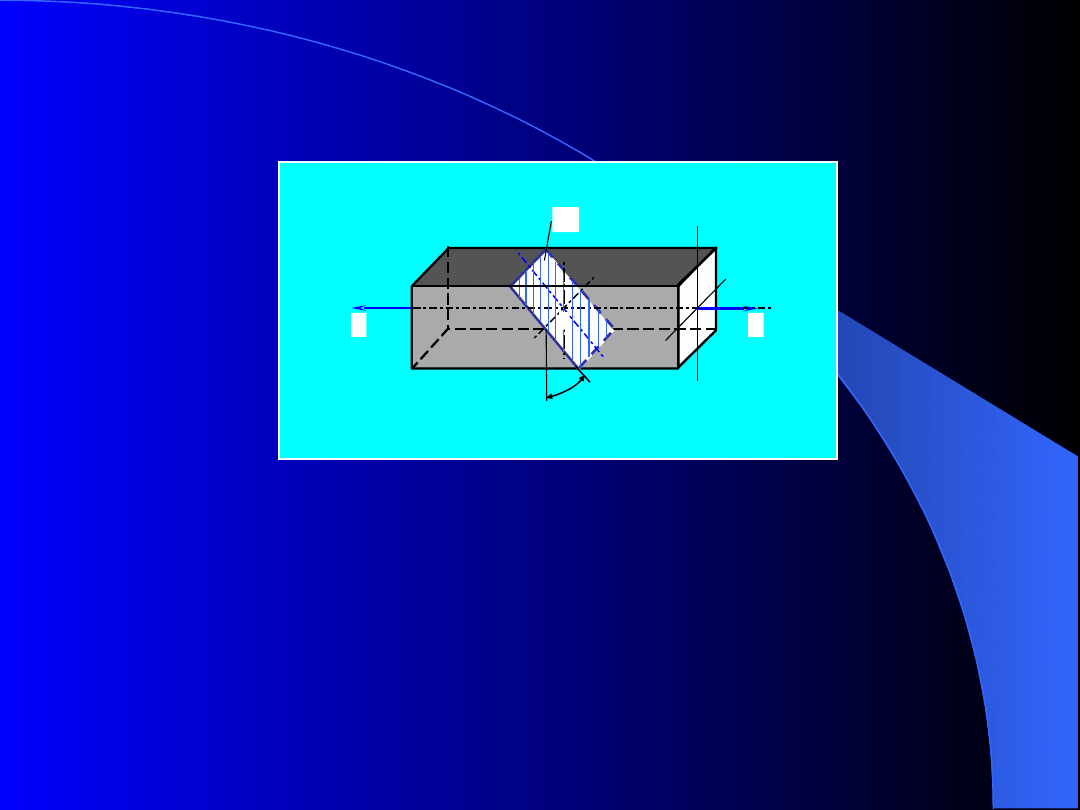
Przez dany punkt 0 można przeprowadzić
nieskończenie wiele przekrojów danego ciała, a zatem
istnieje nieskończenie wiele wektorów naprężenia,
które opisują stan naprężenia w tym punkcie.
0
A
A
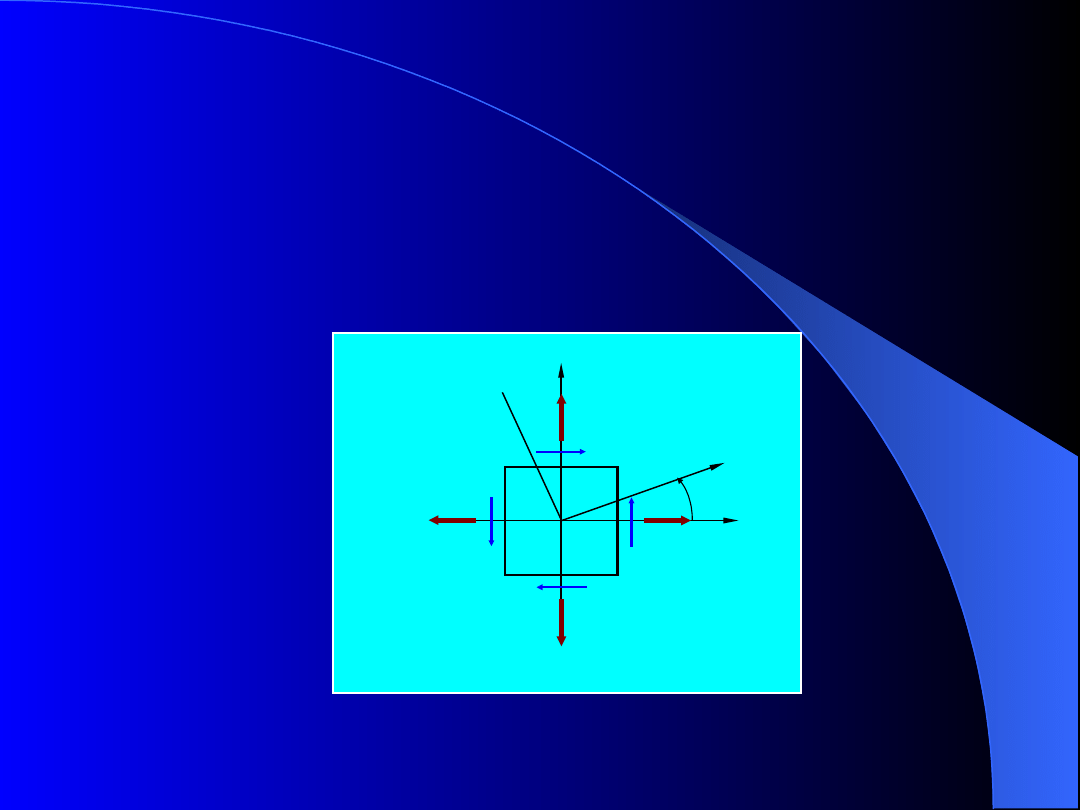
Rys. 1. Przekrój poprzeczny belki i przekrój
nachylony do osi belki pod kątem
Analiza naprężeń w
Analiza naprężeń w
jednokierunkowym stanie
jednokierunkowym stanie
napięcia
napięcia
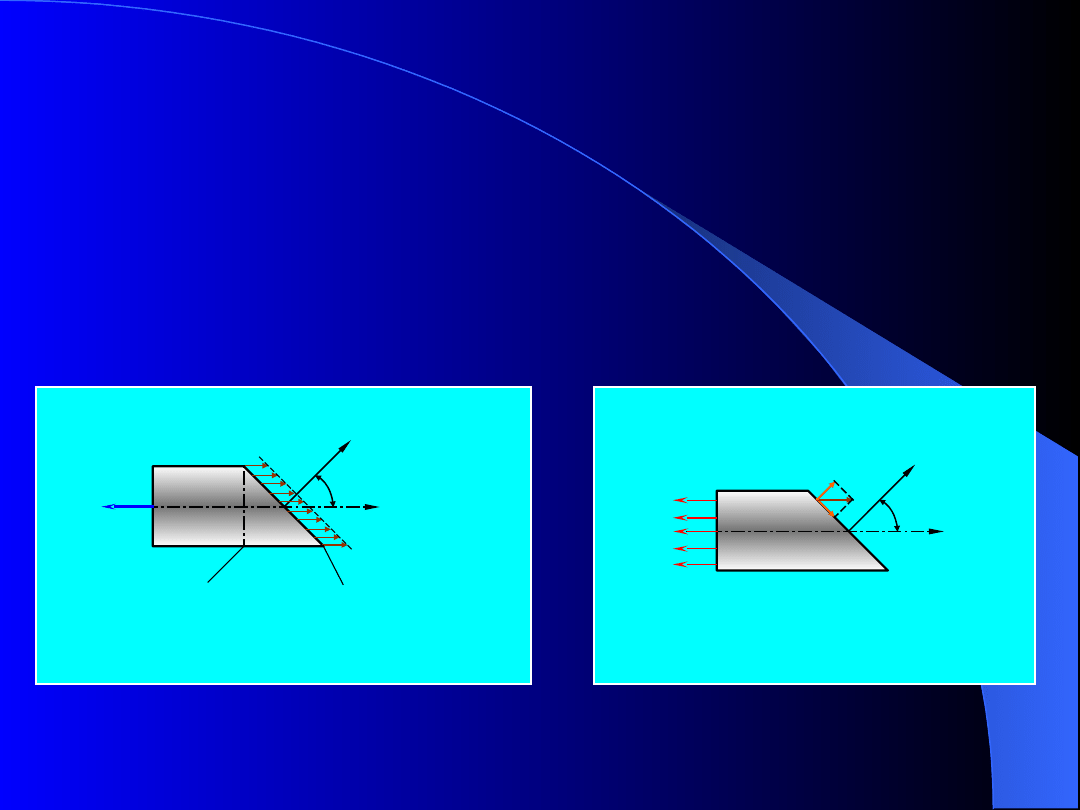
Rozpatrzmy
naprężenia
w
przekroju
A
nachylonym pod kątem do przekroju poprzecznego
pręta poddanego rozciąganiu. Jedną część pręta
odrzucamy, a rozpatrujemy pozostałą część, np. lewą
(rys.2).
Rys. 2. Przekrój nachylony do osi belki pod
kątem
P
0
A
P
Analiza naprężeń w
Analiza naprężeń w
jednokierunkowym stanie
jednokierunkowym stanie
napięcia
napięcia
Rozpatrywana część pręta (rys.3a) znajduje się
w równowadze dzięki temu, że w przekroju przecięcia
odrzucona prawa część pręta działa na część
rozpatrywaną naprężeniami p.
Rys. 3. Jednokierunkowy stan naprężenia; a) część pręta w
równowadze, b) rozkład naprężenia p na składowe
p
n
x
b
)
p
n
x
kierunek
normalnej
zewnętrznej
P
a
)
A
przekrój poprzeczny
przekrój ukośny
Analiza naprężeń w
Analiza naprężeń w
jednokierunkowym stanie
jednokierunkowym stanie
napięcia
napięcia
Z warunku równowagi sił działających na
rozpatrywaną część pręta:
(1)
(2)
stąd:
0
pA
P
X
A
P
p
Uwzględniając,
że:
(3)
cos
A
A
Analiza naprężeń w
Analiza naprężeń w
jednokierunkowym stanie
jednokierunkowym stanie
napięcia
napięcia
otrzymamy:
(4)
(5)
gdyż
Po rozłożeniu naprężenia p na składowe – normalną
i
styczną
otrzymamy:
(6)
cos
cos
A
P
p
A
P
2
cos
cos
p
(7)
cos
sin
sin
p
Analiza naprężeń w
Analiza naprężeń w
jednokierunkowym stanie
jednokierunkowym stanie
napięcia
napięcia
i podstawiając tożsamość
sin2
= 2sin
cos
równanie (7) przyjmuje postać:
(8)
Występujący w powyższych wzorach kąt
zawarty
jest między kierunkiem działania sił
rozciągających a kierunkiem normalnej zewnętrznej
danego przekroju.
2
sin
2
1
Analiza naprężeń w
Analiza naprężeń w
jednokierunkowym stanie
jednokierunkowym stanie
napięcia
napięcia
Dodatnią wartość naprężeń normalnych
przypisywać będziemy naprężeniom rozciągającym, a
więc mającym zwrot zgodny z kierunkiem normalnej
zewnętrznej.
Dodatnią
wartość
naprężeń
tnących
przypisywać będziemy naprężeniom usiłującym obrócić
rozpatrywaną część w kierunku zgodnym z ruchem
wskazówek zegara.
Równania równowagi
Równania równowagi
wewnętrznej
wewnętrznej
W przypadku niejednorodnego stanu naprężenia
wartości składowych stanu naprężenia zmieniają się ze
zmianą położenia rozpatrywanego punktu ciała.
Rozpatrzmy
ciało
obciążone
będące
w
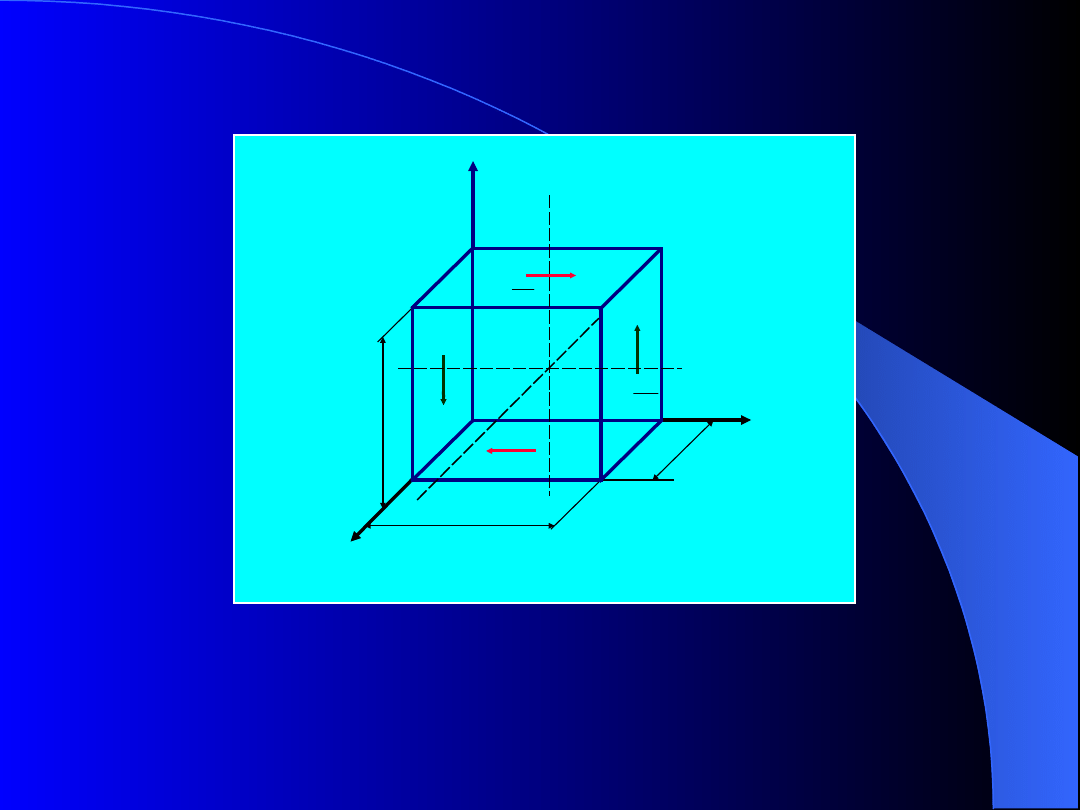
równowadze (siły masowe pominiemy). Wycięty z tego
ciała prostopadłościan (rys. 4) o krawędziach dx, dy, dz
znajduje się w niejednorodnym stanie naprężenia.
Równania równowagi
Równania równowagi
wewnętrznej
wewnętrznej
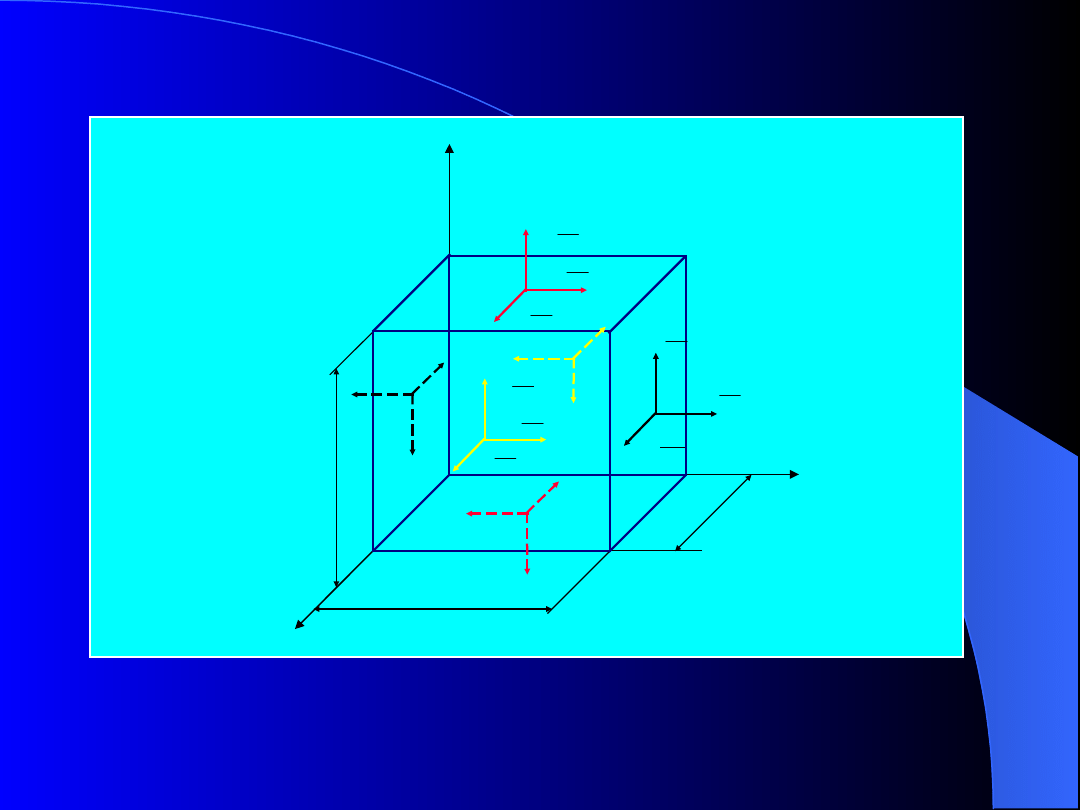
Rys. 4. Naprężenia na ścianach prostopadłościanu o krawędziach
dx, dy, dz
dy
d
z
dx
x
y
z
dy
y
yx
yx
dy
y
y
y
dy
y
yz
yz
z
zx
zy
dx
x
x
x
dx
x
xy
xy
dx
x
xz
xz
xz
xy
x
yz
yx
y
dz
z
z
z
dz
z
zy
zy
dz
z
zx
zx
(9)
Równania równowagi
Równania równowagi
wewnętrznej
wewnętrznej
Warunek równowagi sił działających w kierunku
osi x można zapisać w postaci równania:
0
dxdy
dz
z
dxdy
dxdz
dy
y
dxdz
dydz
dx
x
dydz
X
zx
zx
zx
yx
yx
yx
x
x
x
(10)
Równania równowagi
Równania równowagi
wewnętrznej
wewnętrznej
Po uporządkowaniu i uproszczeniu otrzymamy:
0
z
y
x
zx
yx
x
Z pozostałych warunków równowagi sił względem
pozostałych osi y, z otrzymamy:
(11)
(12)
0
z
y
x
zy
y
xy
0
z
y
x
z
yz
xz
(13)
Równania równowagi
Równania równowagi
wewnętrznej
wewnętrznej
Równania (13) nazywamy
równaniami równowagi
wewnętrznej
:
0
z
y
x
zx
yx
x
0
z
y
x
zy
y
xy
0
z
y
x
z
yz
xz
Aksjomat Boltzmanna
Aksjomat Boltzmanna
Rys. 5. Naprężenia na ścianach prostopadłościanu
wywołujące momenty względem osi x’
d
y
d
z
d
x
x
y
z
x’
z’
y’
dy
y
yz
yz
zy
yz
dz
z
zy
zy
Aksjomat Boltzmanna
Aksjomat Boltzmanna
Na przedstawionym rysunku początek układu
współrzędnych
został
przeniesiony
do
środka
prostopadłościanu. Przedstawiono tylko te naprężenia,
których momenty względem osi x
’
są różne od zera.
Wykorzystując
równanie
równowagi
momentów
względem osi x’ otrzymamy:
0
2
1
2
1
2
1
2
1
'
dz
dxdy
dz
dxdy
dz
z
dy
dzdx
dy
dzdx
dy
y
M
zy
zy
zy
yz
yz
yz
x
(14)
Aksjomat Boltzmanna
Aksjomat Boltzmanna
Po wykonaniu działań i pominięciu małych
wyrażeń wyższego rzędu otrzymamy:
Wykorzystując dwa pozostałe równania równowagi
momentów otrzymamy:
(16)
yz
zy
(15)
zx
xz
xy
yx
(17)
Równania (15), (16) i (17) nazywane są
aksjomatem
Boltzmanna
, który można wyrazić słowami:
składowe naprężeń stycznych prostopadłe do
krawędzi
przecięcia
się
dwu
przekrojów
wzajemnie prostopadłych są sobie równe.
Płaski stan naprężenia
Płaski stan naprężenia
Płaski stan naprężenia występuje wtedy, gdy
x
0,
y
0 oraz
xy
0, a pozostałe naprężenia są równe
zeru.
W wielu praktycznych przypadkach w elementach
cienkościennych wartości naprężeń
z
,
yz
,
zx
są na tyle
małe, że można je pominąć i w tych przypadkach
przyjąć
płaski
stan
naprężenia.
Rozpatrzmy
prostokątny arkusz cienkiej blachy o grubości t
obciążony w swej płaszczyźnie w taki sposób, że na
ściankach wystąpią naprężenia
x
,
y
oraz
xy
(rys.6).
Płaski stan naprężenia
Płaski stan naprężenia
Rys. 6. Płaski stan naprężenia; a) przekrój prostopadły do osi
, b) przekrój prostopadły do osi
x
x
x
y
y
y
1
a)
xy
xy
xy
xy
x
x
x
y
y
y
+/
2
1
b)
xy
xy
xy
xy
Płaski stan naprężenia
Płaski stan naprężenia
Rozpatrzymy lewą, odciętą tym przekrojem część
arkusza, a działanie lewej (odrzuconej) części
zastąpimy naprężeniami
i
(rys.7).
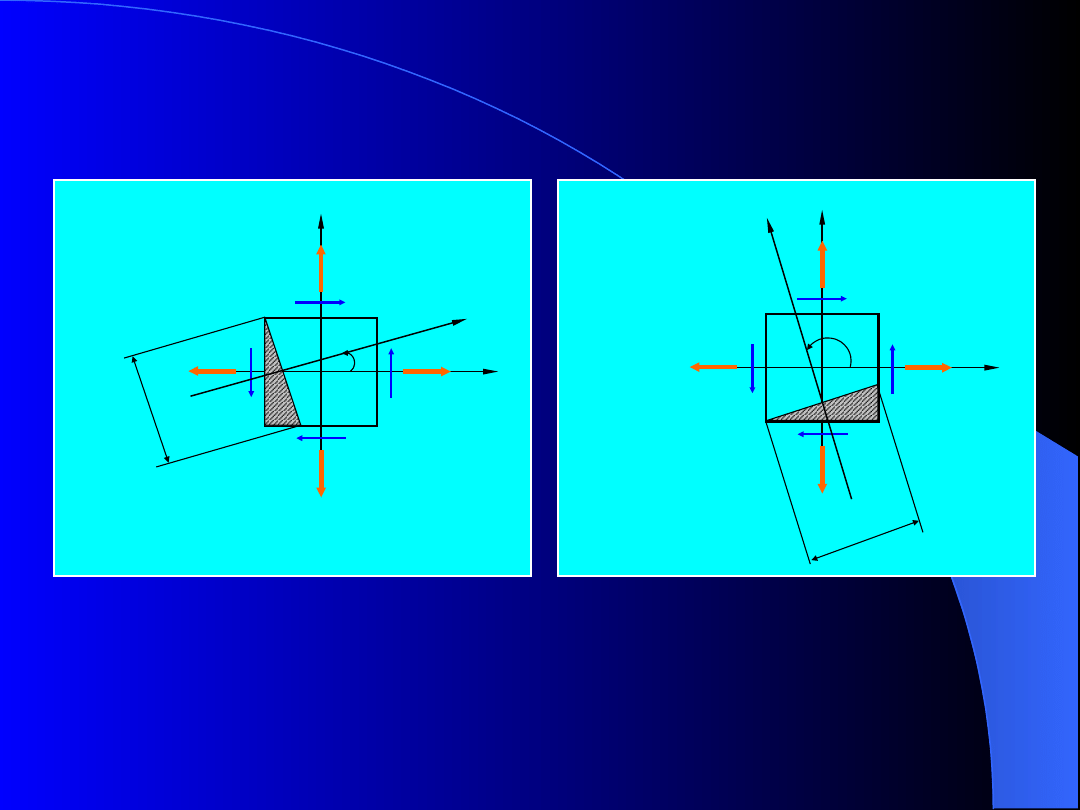
Rys. 7. Część arkusza w równowadze; a) przekrój
prostopadły do osi , b) przekrój prostopadły do osi
x
x
y
y
a)
xy
xy
x
+
/2
x
y
y
+/
2
b)
2
xy
xy
Płaski stan naprężenia
Płaski stan naprężenia
Poszczególne przekroje tej części wyrażą się wzorami
(19)
(18)
(20)
t
A 1
cos
1
cos
t
A
A
x
sin
1
sin
t
A
A
y
Płaski stan naprężenia
Płaski stan naprężenia
Z warunków równowagi sił względem osi
normalnej i stycznej do przekroju A
otrzymamy
równania (po uwzględnieniu aksjomatu Boltzmanna):
(22)
(21)
0
sin
cos
cos
sin
sin
sin
cos
cos
t
t
t
t
t
F
xy
xy
y
x
0
cos
cos
sin
sin
cos
sin
sin
cos
t
t
t
t
t
F
xy
xy
y
x
Płaski stan naprężenia
Płaski stan naprężenia
Po
uporządkowaniu
równań
(21)
i
(22)
otrzymamy:
(23)
cos
sin
2
sin
cos
2
2
xy
y
x
2
2
sin
cos
cos
sin
xy
y
x
(24)
Dla przekroju A
+/2
= A
prostopadłego do osi
(rys.5b) i rozpatrując równowagę części arkusza
(rys.6b) otrzymamy:
cos
sin
2
cos
sin
2
2
2
xy
y
x
(25)
Naprężenie styczne
+/2
=
Płaski stan naprężenia
Płaski stan naprężenia
Wszystkie wzory transformacyjne dla płaskiego
stanu naprężenia można zapisać w postaci:
(26)
(27)
(28)
2
sin
sin
cos
2
2
xy
y
x
2
sin
cos
sin
2
2
2
xy
y
x
2
2
cos
2
sin
2
xy
y
x
Płaski stan naprężenia
Płaski stan naprężenia
wiedząc , że:
(29)
(30)
(31)
2
2
cos
1
sin
2
i
2
2
cos
1
cos
2
równania (26–28) przyjmą postać:
2
sin
2
cos
2
2
xy
y
x
y
x
2
sin
2
cos
2
2
2
xy
y
x
y
x
2
2
cos
2
sin
2
xy
y
x
Koło Mohra
Koło Mohra
Wzory transformacyjne (29-31), określające
wartość naprężeń w przekroju określonym kątem
układu znajdującego się w płaskim stanie naprężeń,
dają się łatwo przedstawić wykreślnie.
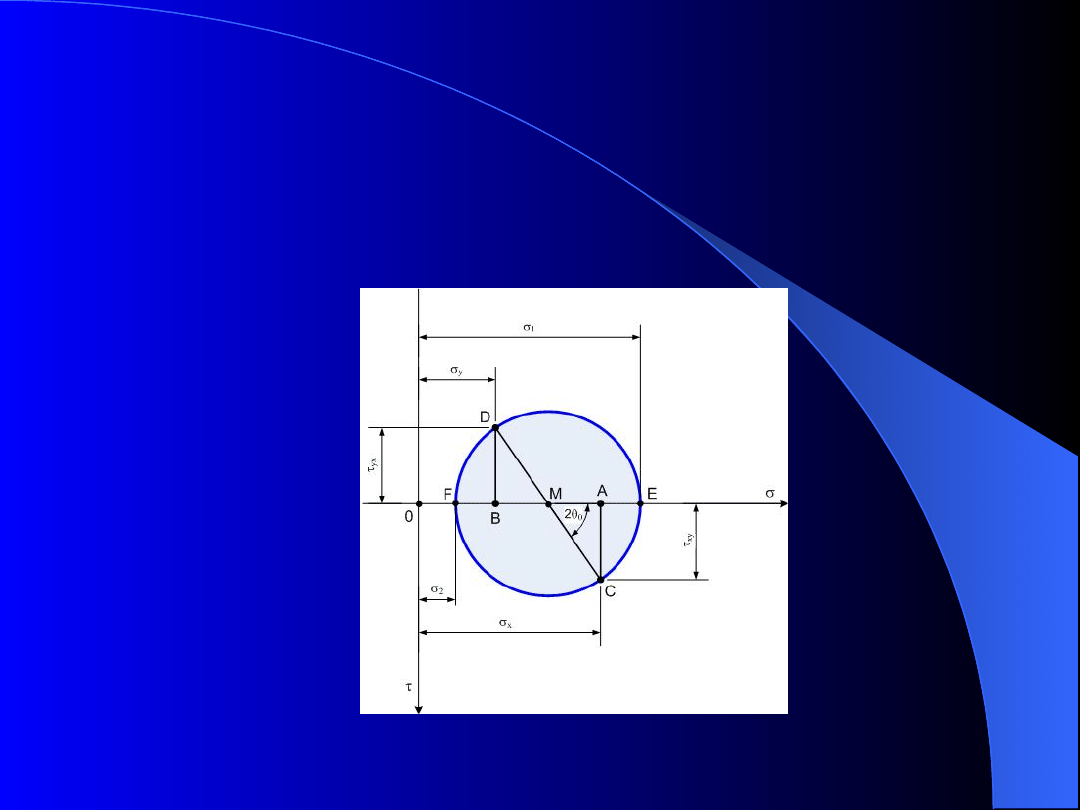
Rys. 8. Koło Mohra dla płaskiego stanu naprężeń
Koło Mohra
Koło Mohra
Uzyskane
wyniki
można
odwzorować
na
płaszczyźnie w układzie współrzędnych , przyjmując:
x
A
0
y
B
0
xy
AC
xy
yx
BD
Koło Mohra
Koło Mohra
Aby poprawnie wykreślić naprężenia styczne
należy przyjąć umowę trygonometryczną dotyczącą
znaków naprężeń. Na jej podstawie aksjomat
Boltzmanna przyjmuje postać:
xy
yx
Środek M koła Mohra:
y
x
B
M
M
2
1
0
0
2
1
0
(32)
(33)
Koło Mohra
Koło Mohra
Na osi poziomej promień r
M
wyznaczają punkty E oraz
F:
ponieważ
(35)
(34)
Promienie
m
MD
MC
r
M
kreślimy
koło,
przy
czym
można
zauważyć:
2
2
2
2
4
2
1
xy
y
x
M
AC
MA
r
2
y
x
MA
M
r
M
E
0
0
(36)
M
r
M
F
0
0
Koło Mohra
Koło Mohra
Odcinek
wyznacza największe, a odcinek
najmniejsze naprężenia normalne. W punktach E i F
koło Mohra przecina oś naprężeń normalnych .
Oznacza to, że naprężenie styczne jest równe zeru.
E
0
F
0
Koło Mohra
Koło Mohra
(38)
(37)
Podstawiając do wzorów (35) i (36) zależność (34)
otrzymamy wzory określające
wartości ekstremalne
naprężeń normalnych
nazywane również
naprężeniami
głównymi
(
1
i
2
):
2
2
1
4
2
1
2
0
xy
y
x
y
x
E
2
2
2
4
2
1
2
0
xy
y
x
y
x
F
Kierunki naprężeń głównych
Kierunki naprężeń głównych
Kierunki naprężeń głównych (ekstremalnych)
można wyznaczyć przyrównując do zera pochodną
względem :
(40)
(39)
0
sin
cos
2
cos
sin
2
sin
cos
2
0
0
2
0
0
0
0
xy
y
x
d
d
a więc:
0
2
cos
2
2
sin
0
0
xy
y
x
Kierunki naprężeń głównych
Kierunki naprężeń głównych
Przekrój, w którym wystąpią naprężenia główne
wyznaczymy określając kąt
0
, czyli kąt transformacji
głównej z zależności (40):
(42)
(41)
więc:
0
0
2
sin
2
cos
2
y
x
xy
y
x
xy
tg
2
2
cos
2
sin
2
0
0
0
Kierunki naprężeń głównych
Kierunki naprężeń głównych
Przekształcając wzór (31)
otrzymamy:
(44)
(43)
Porównując wzory (40) oraz (43)
2
2
cos
2
sin
2
xy
y
x
2
2
cos
2
2
sin
0
0
xy
y
x
0
2
cos
2
2
sin
0
0
xy
y
x
2
2
cos
2
2
sin
0
0
xy
y
x
ora
z
można zauważyć że:
0
0
Kierunki naprężeń głównych
Kierunki naprężeń głównych
W przekroju, w którym występują normalne
naprężenia główne to naprężenia styczne są równe
zeru. Potwierdza to wnioski wyprowadzone z analizy
koła Mohra.
(45)
Kierunki
ekstremalnych
wartości
naprężeń
stycznych określone są z warunku:
0
2
sin
2
2
cos
0
0
xy
y
x
d
d
(47)
Mnożąc równanie (42) przez (46) otrzymamy:
Kierunki naprężeń głównych
Kierunki naprężeń głównych
Kąt
0
został wprowadzony dla odróżnienia od
kąta
0
:
(46)
xy
y
x
tg
2
2
0
y
x
xy
tg
2
2
cos
2
sin
2
0
0
0
xy
y
x
tg
2
2
0
1
2
2
0
0
tg
tg
(49)
Kierunki
ekstremalnych
wartości
naprężeń
stycznych zawierają kąty /4 z kierunkami głównymi
naprężeń normalnych. Wartość
ekstr
otrzymamy z
zależności:
Kierunki naprężeń głównych
Kierunki naprężeń głównych
stąd otrzymamy:
(48)
4
0
0
2
2
4
2
1
xy
y
x
ekstr
Wartość ta równa jest co do modułu promieniowi koła
Mohra r
M
:
2
1
2
1
ekstr
(50)
Koło Mohra jest wykreślnym odwzorowaniem
wszystkich stanów naprężenia w otoczeniu danego
punktu. Z koła Mohra możemy odczytać bezpośrednio
widoczne właściwości płaskiego stanu naprężenia,
czyli:
•
Istnieją tylko dwa przekroje, w których występują
tylko naprężenia normalne
=
1
,
+/2
=
2
oraz
= 0. Przekroje te prostopadłe względem siebie
nazywamy
przekrojami głównymi
, a naprężenia
normalne w tych przekrojach
1
i
2
naprężeniami
głównymi.
•
Naprężenia główne (
1
,
2
) są ekstremalnymi
wartościami naprężenia
i zawsze jest spełniona
nierówność
2
1
, jeśli
1
>
2
.
•
Ekstremalne naprężenia styczne ekstr występują
w przekrojach obróconych względem przekrojów
głównych o kąt /4. Ich bezwzględna wartość
jest ta sama i wynosi , a więc równa się połowie
różnicy naprężeń głównych
Uproszczona analiza naprężeń
Uproszczona analiza naprężeń
w przestrzennym stanie
w przestrzennym stanie
napięcia
napięcia
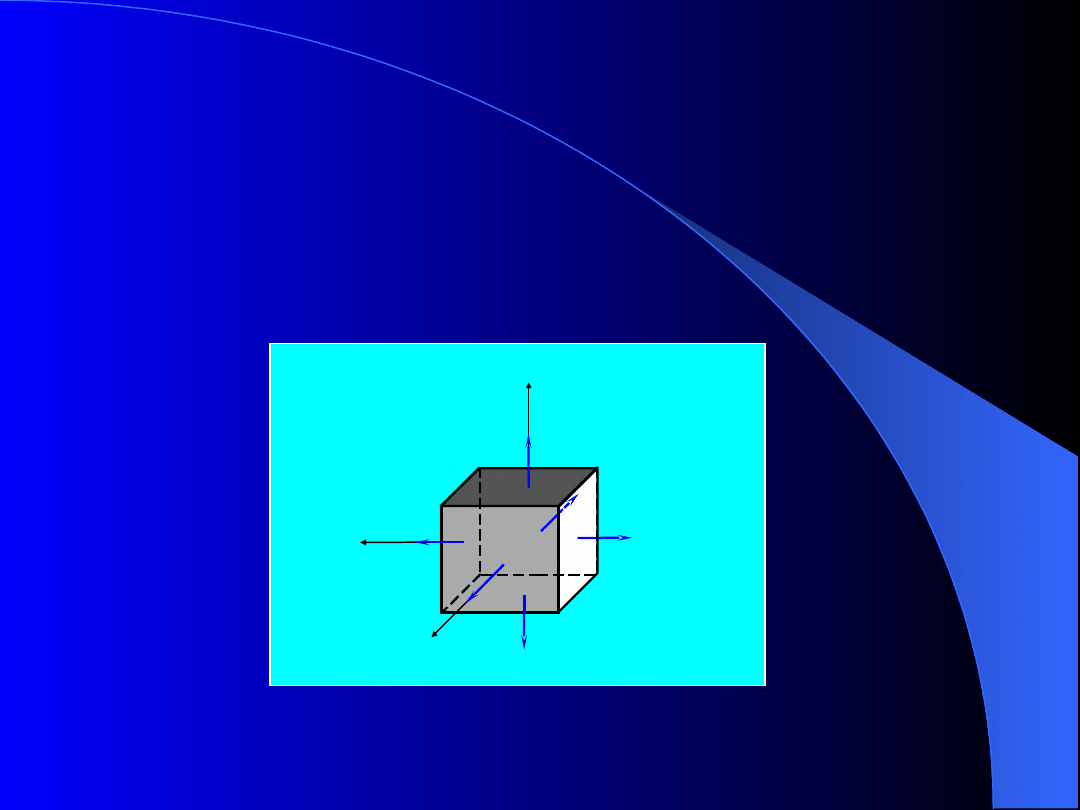
Przestrzenny stan napięcia możemy otrzymać,
jeżeli do układu płaskiego, rozciąganego naprężeniami
głównymi
1
,
2
dodamy naprężenia rozciągające
3
.
2
3
2
1
1
1
2
3
3
Rys. 9. Naprężenia główne w trójwymiarowym stanie
naprężeń
Uproszczona analiza naprężeń
Uproszczona analiza naprężeń
w przestrzennym stanie
w przestrzennym stanie
napięcia
napięcia
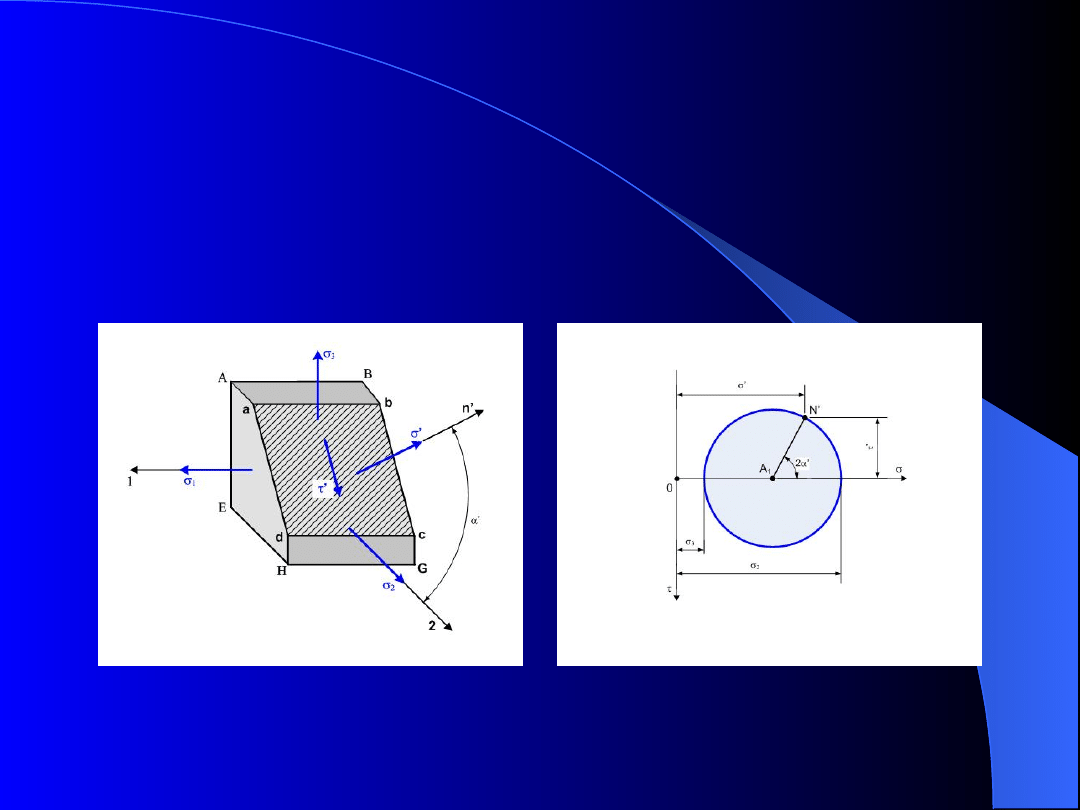
Wyznaczmy naprężenia w przekroju abcd równoległym
do osi 1 (rys.10)
Rys. 10. Naprężenia w przekroju równoległym do kierunku
naprężenia
1
; a) naprężenia w przekroju abcd, b) koło
Mohra
a)
b)
Uproszczona analiza naprężeń
Uproszczona analiza naprężeń
w przestrzennym stanie
w przestrzennym stanie
napięcia
napięcia
Naprężenie
1
nie wpływa na wartość naprężeń
’
i
’
, które określa punkt N
’
na kole Mohra
narysowanego dla naprężeń głównych
2
i
3
.
Naprężenie
’
jest ujemne i dlatego na rys.10b jego
zwrot jest zgodny z ujemnym zwrotem osi .
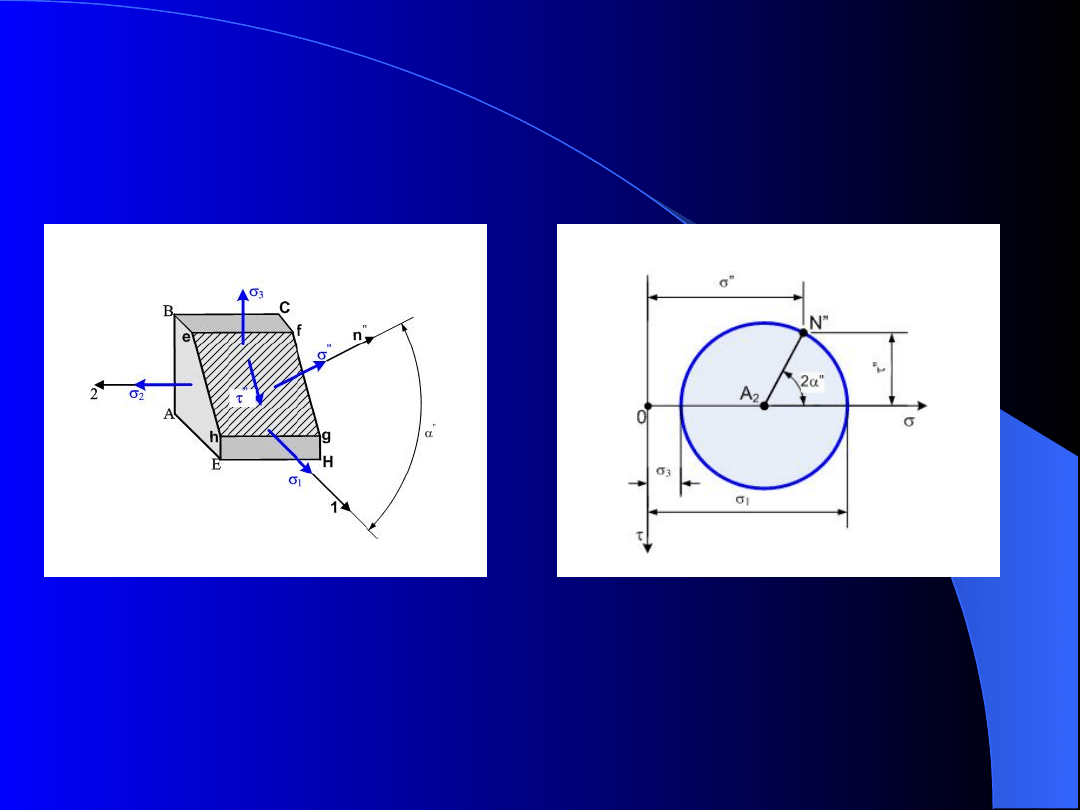
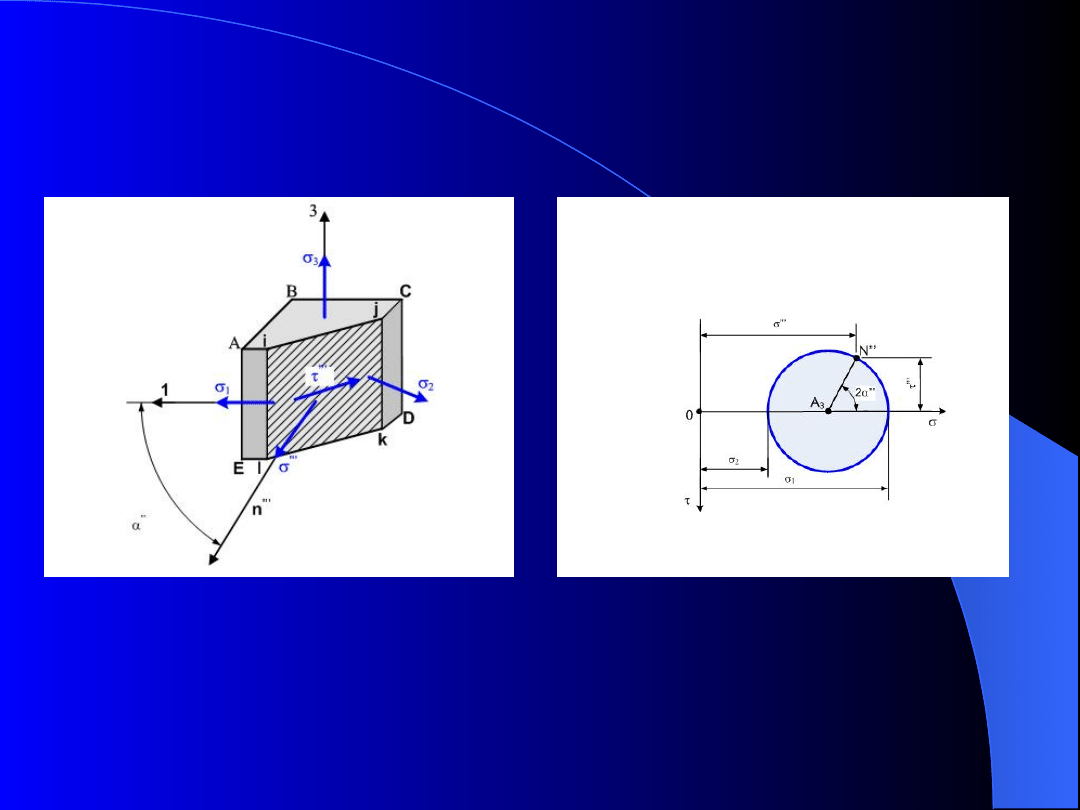
Podobnie postępujemy dla przekrojów efgh oraz
ijkl równoległych odpowiednio do osi 2 i 3, otrzymując
punkty N
”
i N
”’
określające naprężenia
”
,
”
oraz
”’
,
”’
w tych przekrojach.
Uproszczona analiza naprężeń
Uproszczona analiza naprężeń
w przestrzennym stanie
w przestrzennym stanie
napięcia
napięcia
Rys. 11. Naprężenia w przekroju równoległym do kierunku
naprężenia
2
; a) naprężenia w przekroju efgh, b) koło
Mohra
a
)
b
)
Uproszczona analiza naprężeń
Uproszczona analiza naprężeń
w przestrzennym stanie
w przestrzennym stanie
napięcia
napięcia
Rys. 12. Naprężenia w przekroju równoległym do kierunku
naprężenia
3
; a) naprężenia w przekroju ijkl, b) koło Mohra
a
)
b
)
Uproszczona analiza naprężeń
Uproszczona analiza naprężeń
w przestrzennym stanie
w przestrzennym stanie
napięcia
napięcia
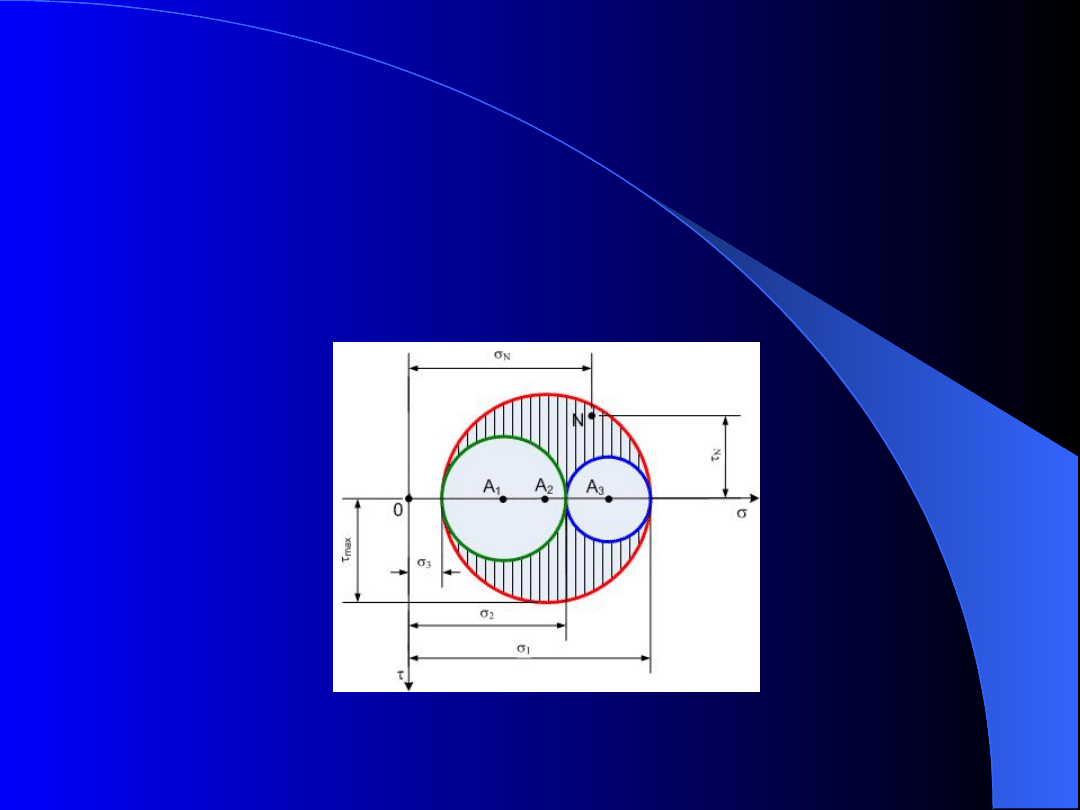
Rys. 13. Koło Mohra dla trójosiowego stanu naprężenia
Przenosząc te trzy koła Mohra na jeden wykres
mamy obraz, który w analizie trójwymiarowego stanu
naprężenia spełnia podobną rolę jak pojedyncze koło
Mohra dla stanu płaskiego.
Uproszczona analiza naprężeń
Uproszczona analiza naprężeń
w przestrzennym stanie
w przestrzennym stanie
napięcia
napięcia
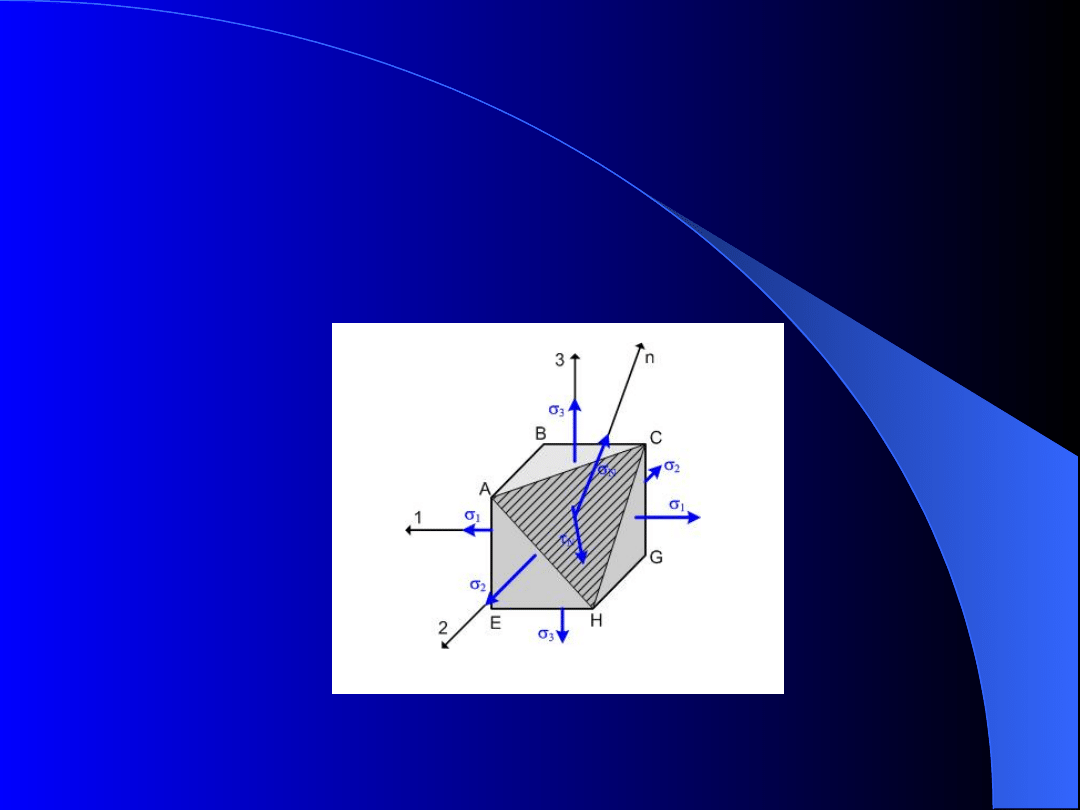
Rys. 14. Naprężenia w przekrojach ACH nachylonym do osi
1, 2, 3
Naprężenia
N
i
N
w przekroju ACH (rys.14)
nachylonym do wszystkich osi 1, 2, 3, reprezentuje
punkt N leżący w polu zakreskowanym (rys. 13).
Uproszczona analiza naprężeń
Uproszczona analiza naprężeń
w przestrzennym stanie
w przestrzennym stanie
napięcia
napięcia
Maksymalne naprężenie styczne ma wartość
równą promieniowi największego koła Mohra i dla
przypadku
1
>
2
>
3
jego moduł wynosi:
2
3
1
max
(51)
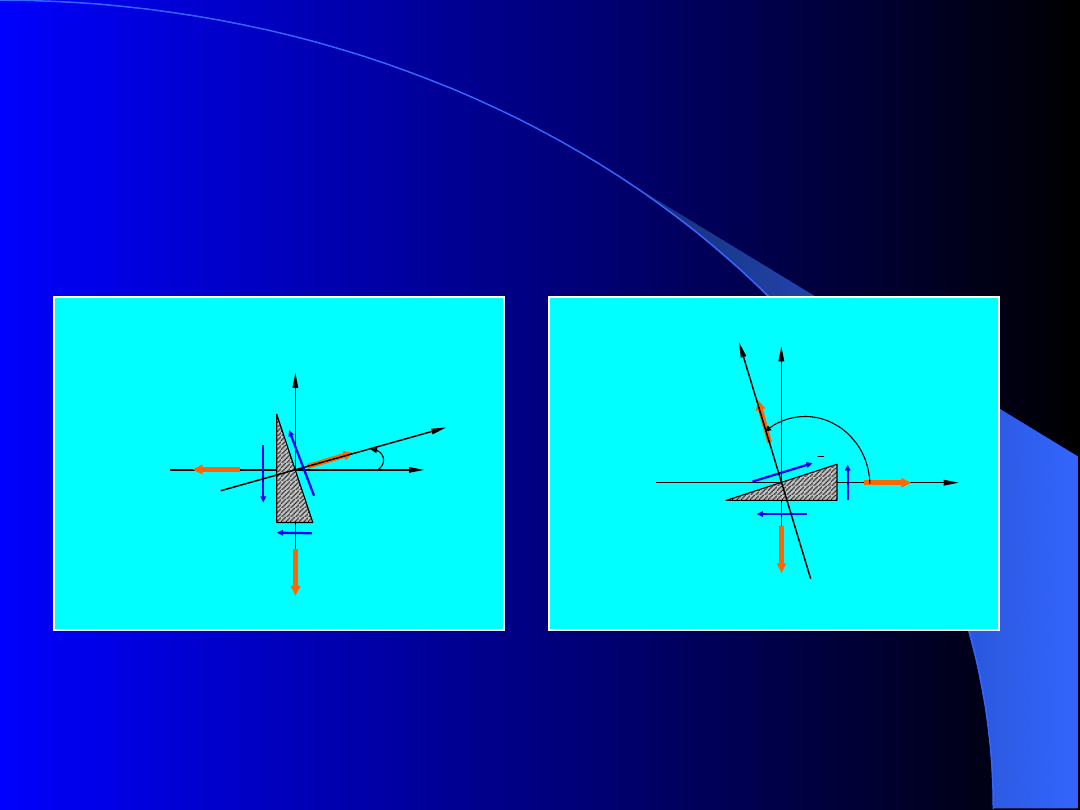
Przykład 1.
Dany jest płaski stan naprężenia:
x
,
y
,
xy
,
yx
(rys. 1.1). Wyznaczyć naprężenia:
,
,
,
, jeśli
układ osi , jest obrócony o kąt względem układu
osi x,y.
x
x
x
y
y
y
xy
xy
yx
yx
Rys. 1.1. Element w płaskim stanie naprężenia
1.
Wyznaczenie naprężeń w układzie osi , za
pomocą koła Mohra.
Odwzorujemy zadany stan naprężenia na kole
Mohra (rys.1.2) przyjmując
,
, ,
(zgodnie z trygonometryczna umową o
znakach). Narysujmy prostą G, M, H obróconą o kąt 2
względem prostej C, M, D.
Rys. 1.1. Element w płaskim stanie naprężenia
x
A
0
y
B
0
xy
AC
xy
yx
BD
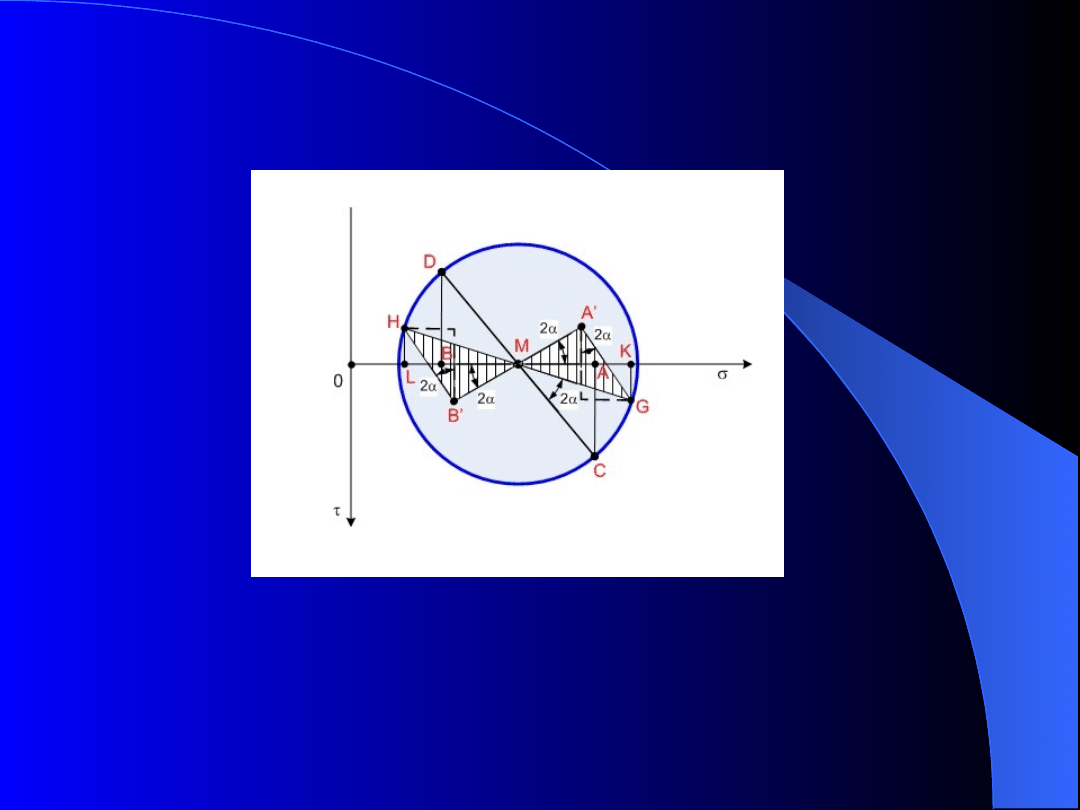
Rys. 1.2. Element w płaskim stanie naprężenia
Rzutując punkty G i H na osie i otrzymamy:
K
0
L
0
GK
HL
Jeżeli obrócimy trójkąty CMA i DMB względem punktu
M o kąt 2, to otrzymamy trójkąty GMA’ i HMB’.
Z analizy koła Mohra wynika, że:
2
sin
'
2
cos
'
0
0
GA
MA
M
K
2
sin
'
2
cos
'
0
0
HB
MB
M
L
2
cos
'
2
sin
'
GA
MA
GK
2
cos
'
2
sin
'
HB
MB
HL
Uwzględniając, że
oraz
2
'
'
y
x
MA
MB
MA
MA
xy
BD
HB
AC
GA
'
'
Z tego wynika, że:
2
sin
2
cos
2
2
xy
y
x
y
x
2
sin
2
cos
2
2
xy
y
x
y
x
2
cos
2
sin
2
xy
y
x
2
cos
2
sin
2
xy
y
x
2.
Wyznaczenie
naprężeń
za
pomocą
wzorów
transformacyjnych
jeśli
kąt
= /2. Zgodnie z
matematyczną umową o znakach
xy
=
yx
, a więc:
y
y
x
y
x
y
x
y
x
y
x
y
x
sin
cos
2
2
2
sin
2
cos
2
2
x
y
x
y
x
y
x
y
x
y
x
y
x
sin
cos
2
2
2
sin
2
cos
2
2
y
x
y
x
y
x
y
x
y
x
cos
sin
2
2
cos
2
sin
2
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
- Slide 75
- Slide 76
- Slide 77
- Slide 78
- Slide 79
- Slide 80
- Slide 81
- Slide 82
- Slide 83
- Slide 84
- Slide 85
- Slide 86
- Slide 87
- Slide 88
- Slide 89
- Slide 90
- Slide 91
- Slide 92
- Slide 93
- Slide 94
- Slide 95
- Slide 96
- Slide 97
- Slide 98
- Slide 99
- Slide 100
- Slide 101
- Slide 102
- Slide 103
- Slide 104
- Slide 105
- Slide 106
- Slide 107
- Slide 108
- Slide 109
- Slide 110
- Slide 111
- Slide 112
- Slide 113
- Slide 114
- Slide 115
- Slide 116
- Slide 117
- Slide 118
- Slide 119
- Slide 120
- Slide 121
- Slide 122
- Slide 123
Wyszukiwarka
Podobne podstrony:
POWYM-2 sciaga, Hipotezy wytężeniowe; naprężeniowe zredukowane
8 Wytężenie i hipotezy wytężeniowe
hipotezy wytezeniowe
12 Hipotezy wytezeniaid 13725 Nieznany
12 13 Z Hipotezy wytezenia Obciazenie zlozoneid 13706 (2)
Hipotezy wytężeniowe
8 Wytężenie i hipotezy wytężeniowe
hipotezy wytężeniowe Michał Knioła
WM2 10 Hipotezy wytężeniowe (3)
Hipotezy wytężenia
AALS hipotermia, prawie utopiony, porażenie prądem, zatrucia
Kredyty hipoteczne
Weryfikacja hipotez statystycznych
W15 reakcje utlenienia redukcji
W15 i 16A projektowanie deskowań 24042007
więcej podobnych podstron