
NAPĘD
ELEKTRYCZNY
Teresa Orłowska-Kowalska,
prof. dr hab. inż.
Zakład Napędów Elektrycznych
www.imne.pwr.wroc.pl/zne
godz. konsultacji: śr.11-13, pt.9-
11

WYKŁAD 3
Zagadnienia
szczegółowe związane
z równaniem ruchu
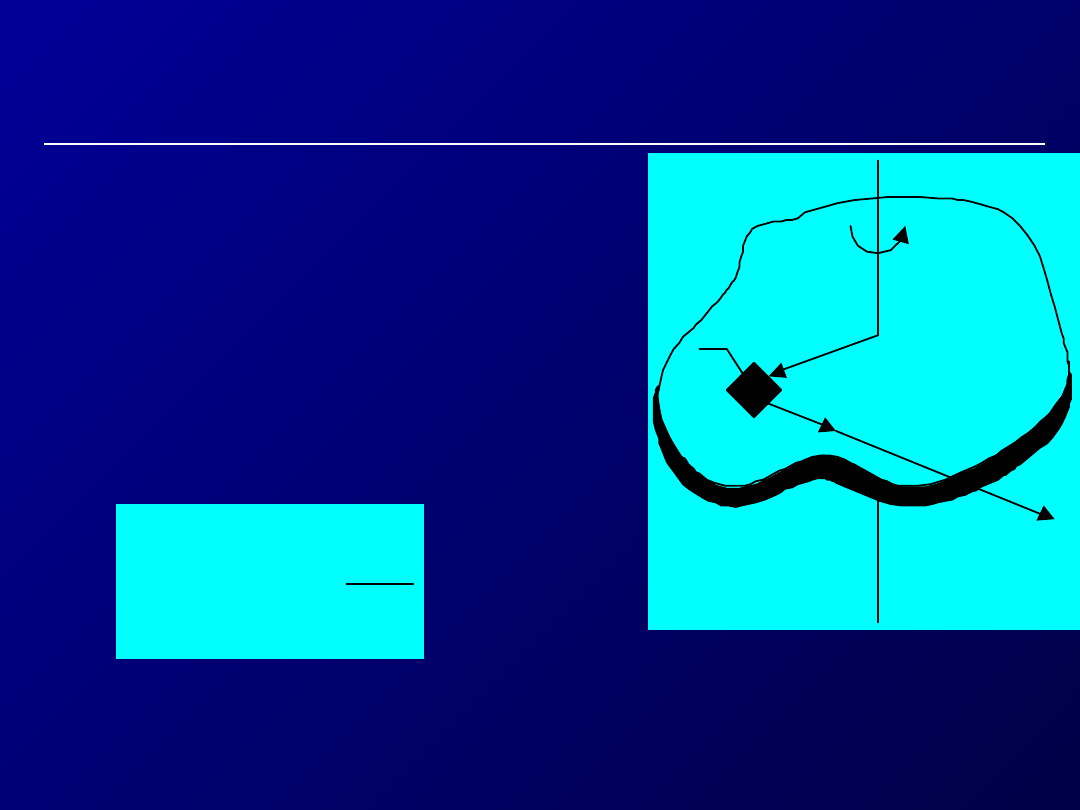
Moment bezwładności
i moment zamachowy
Równanie równowagi sił
działających na element
masy dm będzie miało
postać:
dF
r
dm
dv
Rys.1.18 Ilustracja pojęcia
momentu bezwładności:
dm- masa elementarna, dF-
elementarna siła
przyspieszająca masę dm
dt
dv
dm
dF
Moment bezwładności
i moment zamachowy
Elementarny moment dynamiczny:
dt
d
dm
r
dt
dv
dm
r
dM
d
*
*
2
Sumując elementarne momenty dla całej
masy m rozpatrywanej bryły, otrzymuje
się:
M
d
dt
r dm J
d
dt
d
m
2
0
Moment bezwładności
i moment zamachowy
Stąd wynika, że moment
bezwładności J
opisany jest wzorem:
J
r dm
m
2
0
Jeśli przyjąć, że ciało o masie
zredukowanej m
b
wiruje
względem osi przechodzącej
przez punkt ciężkości, to
moment bezwładności jest
równy iloczynowi masy ciała i
kwadratu zastępczego
promienia bezwładności masy
r
b
[kg m
2
] lub [Nm s
2
]:
J
m r
b
b
2
Moment bezwładności
i moment zamachowy
W katalogach jest podawana niekiedy wartość
tzw. momentu zamachowego
(gdzie: g - przyspieszenie ziemskie [m/s
2
]):
GD
gm r
Jg
b
2
2
2
4
Jeśli GD
2
jest wyrażone w
[Nm
2
]:
Jeśli GD
2
jest wyrażone w [kG
m
2
],
to przelicznik będzie wynosił:
J
GD
g
2
4
J
GD
2
4
Moment bezwładności
i moment zamachowy
Jeśli prędkość jest wyrażona w obrotach na
minutę, to moment dynamiczny wyznacza się z
zależności
(przy czym: M
d
[Nm], GD
2
[Nm
2
], n [1/min]):
M
J
d
dt
GD
g
dn
dt
GD dn
dt
d
2
2
4 30
375
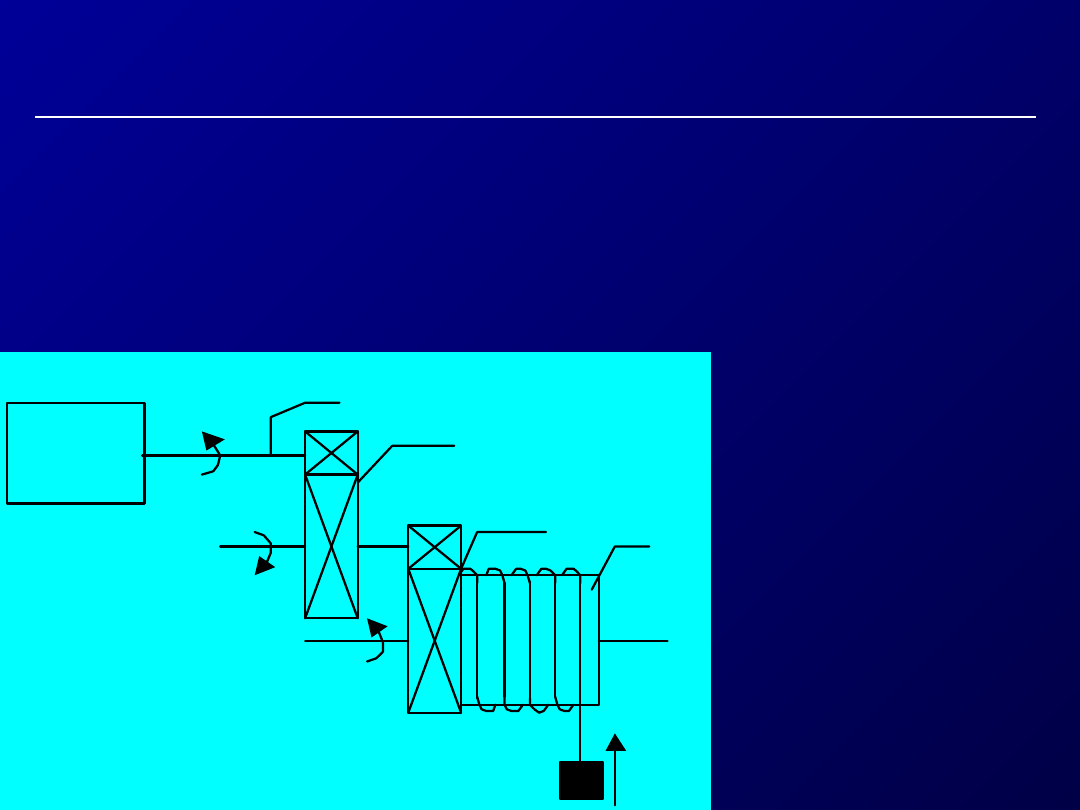
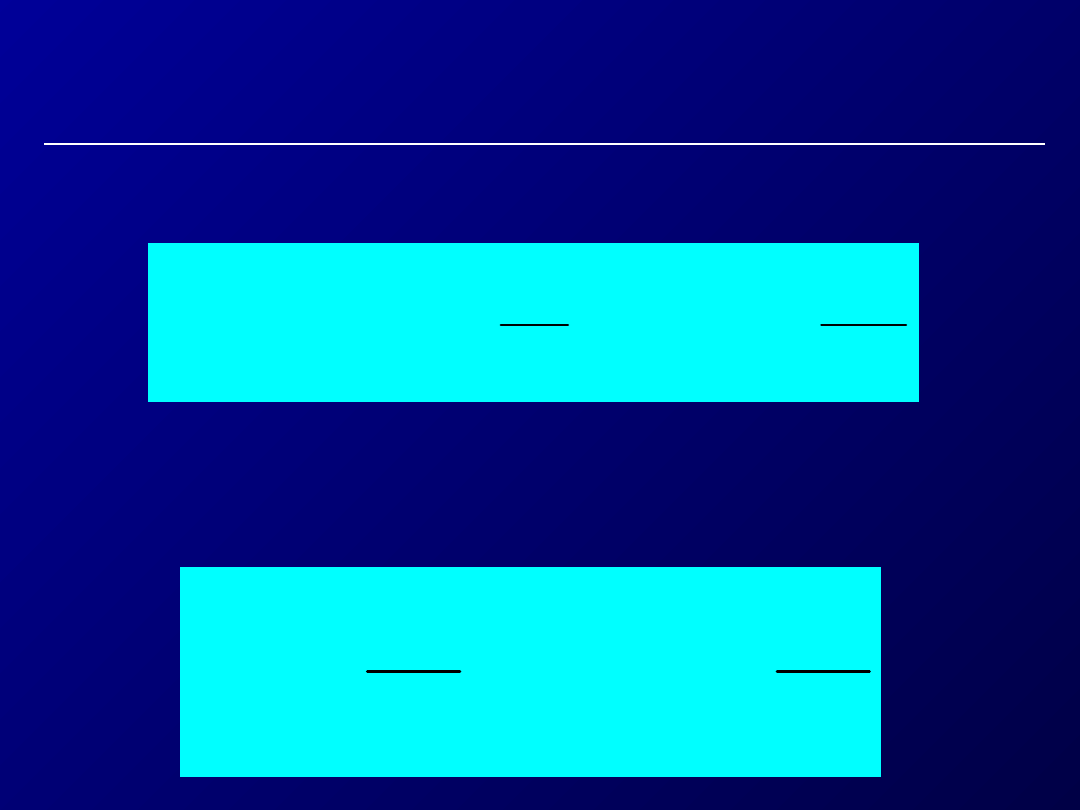
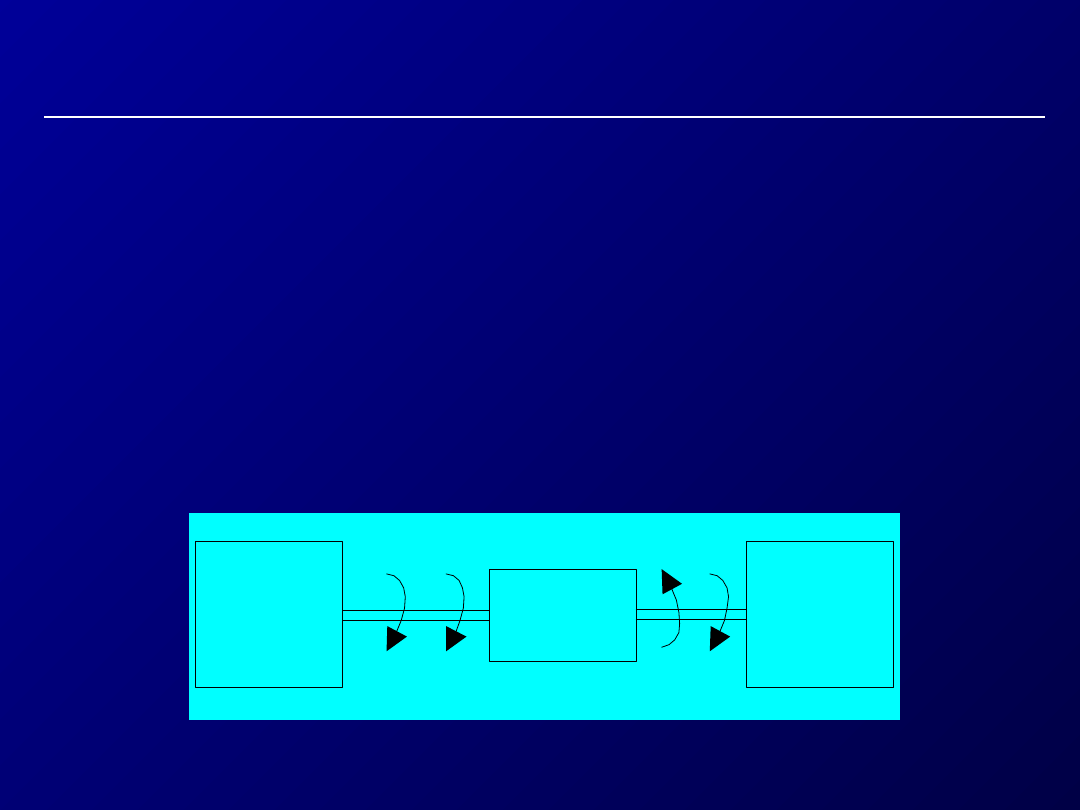
Zastępczy moment
bezwładności
Technicznie rozwiązania układów napędowych
zawierają zwykle przekładnie mechaniczne
zmieniające prędkość obrotową i
zmieniające ruch obrotowy na postępowy:
SE
G
V
g
b
i
2
i
1
J
s
M
e
,
s
J
1
M
1
,
1
J
2
M
2
,
2
Rys.1.19
Mechanizm
z przekładnią i
zmianą ruchu
obrotowego na
postępowy

Zastępczy moment
bezwładności
Elementy maszyny roboczej, połączone z
silnikiem napędowym oraz między sobą za
pomocą przekładni mechanicznych mają
różne prędkości kątowe lub liniowe, różne
momenty oporowe.
Dlatego zarówno do obliczeń statycznych
(np. wyznaczenie mocy znamionowej silnika)
jak i dynamicznych (rozwiązywanie równania
ruchu), należy:
sprowadzić momenty oporowe
i momenty bezwładności poszczególnych
elementów układu na wał silnika.
Zastępczy moment
bezwładności
Przy wyznaczeniu zastępczego momentu
bezwładności korzysta się z zasady zachowania
energii, czyli, że:
całkowita energia kinetyczna układu zastępczego
musi być równa sumie energii kinetycznych
poszczególnych elementów układu rzeczywistego
.
2
2
2
2
2
2
2
2
2
2
1
1
2
2
g
G
s
s
s
z
k
v
m
J
J
J
J
E
Zastępczy moment
bezwładności
a po przekształceniu:
2
2
2
1
2
2
1
1
1
1
s
g
G
s
z
v
m
i
i
J
i
J
J
J
1
1
s
i
2
1
2
i
gdzie
przełożenia
poszczególnych
przekładni:
Zastępczy moment
bezwładności
A więc ogólna zależność na zastępczy moment
bezwładności będzie miała postać:
m
k
s
k
k
n
j
s
j
j
z
v
m
J
J
1
2
1
2
gdzie: - momenty bezwładności
elementów
wirujących z prędkością
kątową
(indeks j=1 dotyczy silnika
napędowego),
- masy elementów poruszających się
ruchem
postępowym z prędkością liniową
J
j
j
m
k
k
v
Zastępczy moment
bezwładności
Podobnie, zastępczy moment zamachowy
układu można wyrazić wzorem:
gdzie:
m
k
s
k
k
n
j
s
j
j
z
v
G
GD
GD
1
2
1
2
2
2
4
G
m g
k
k
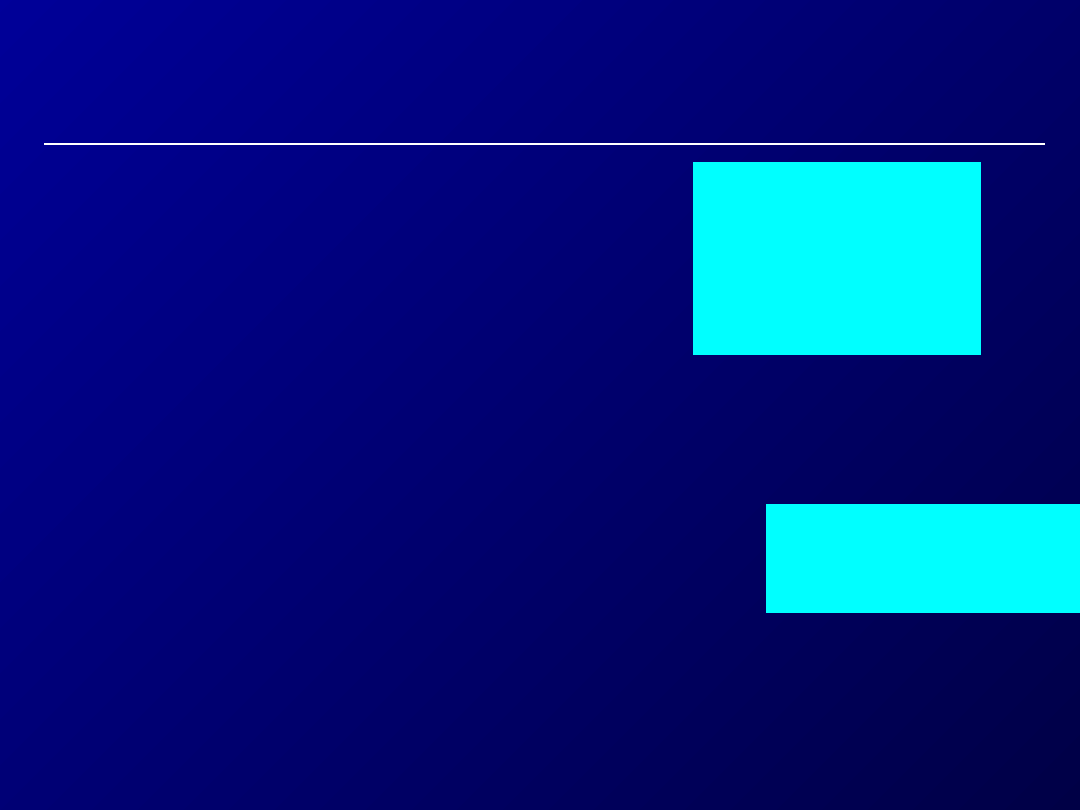
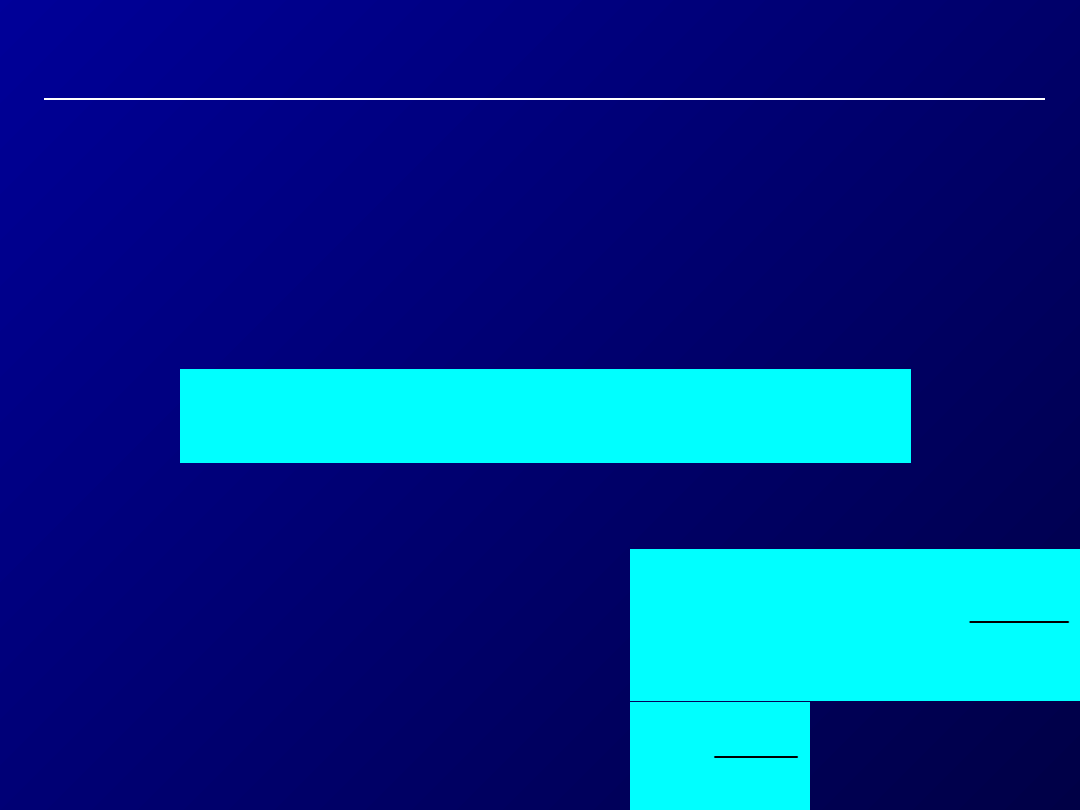
Zastępczy moment
oporowy
Zastępczy (zredukowany) moment oporowy na
wale silnika elektrycznego wyznacza się na
podstawie
zasady zachowania energii w stanie
ustalonym
, tzn.: przyjmuje się, że
moc
wydawana przez silnik napędowy równa jest
sumie
mocy
pobieranych
przez
poszczególne elementy maszyny roboczej,
powiększonej o straty w przekładniach.
SE
P
MR
,i
M
o
M
e
s
m
Rys.1.20 Schemat UN z przekładnią
jednostopniową
Zastępczy moment
oporowy
Zależność na moment oporowy zastępczy w
dwóch przypadkach:
1 - dla przypadku pracy silnikowej -
przepływ energii od silnika do maszyny
roboczej:
skąd zastępczy moment oporowy
sprowadzony do wału silnika będzie wynosił:
gdzie przełożenie przekładni:
P
M
M
e
e
s
o
m
M
M
M
i
oz
e
o
i
s
m
Zastępczy moment
oporowy
2 - dla przypadku pracy hamulcowej -
przepływ energii od maszyny roboczej do
silnika:
stąd:
P
M
M
e
e
s
o
m
M
M
M
i
oz
e
o
Zastępczy moment
oporowy
Jeżeli w układzie zastosowana jest przekładnia
k-stopniowa, to wypadkowa sprawność i
wypadkowe przełożenie przekładni są równe
odpowiednio:
1
2
1
2
k
k
i i i
i
Zastępczy moment
oporowy
W przypadku złożonego układu
napędowego (tzw. wielokrotnie
sprzężonego):
- przy podnoszeniu (praca silnikowa)
moc silnika będzie równa:
czyli ( - prędkość kątowa bębna
na rys.1.19):
b
g
s
e
s
v
G
M
M
M
P
2
1
2
1
2
2
1
1
1
2
1
2
1
2
1
2
1
2
1
1
1
1
1
1
i
i
v
G
i
i
M
i
M
M
M
b
b
g
e
oz
b
2
Zastępczy moment
oporowy
Podobnie
przy
opuszczaniu
(praca
hamulcowa silnika) będzie:
2
1
2
1
2
1
2
1
2
1
1
1
i
i
v
G
i
i
M
i
M
M
b
b
g
oz

Dziękuję za uwagę
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
Wyszukiwarka
Podobne podstrony:
Wykład MO 21.11.10, Mechatronika, Metalurgia i Odlewnictwo, Wykłady
Cząsteczka (MO), CHEMIA, semestr 1, chemia ogólna, wykłady
mat z MO do egz, Studia, Mikrobiologia, Wykłady
MO tabelki z wykładu
Psychologia ogólna Szeląg Podstawy neurologii wykład 3 Funkcjonalne zróżnicowanie kory mó
MO tabelki z wykładu
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
Zaburzenia nerwicowe wyklad
Szkol Wykład do Or
więcej podobnych podstron