
SYSTEMY POMIAROWE
Definicja i klasyfikacja
systemów pomiarowych

System pomiarowy
System pomiarowy jest definiowany
jako zbiór jednostek funkcjonalnych
tworzących całość organizacyjną,
objętych wspólnym sterowaniem
przeznaczony do realizacji
określonego celu metrologicznego.
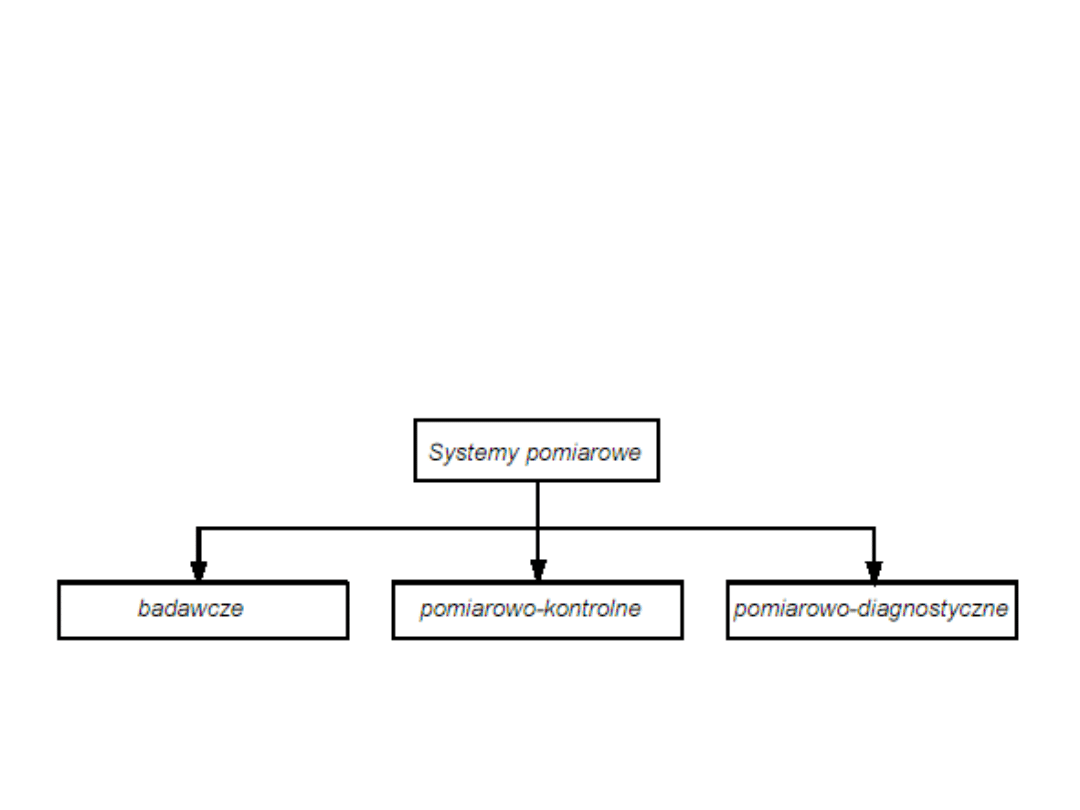
W zależności od przeznaczenia
rozróżnia się trzy klasy systemów
pomiarowych:
badawcze, pomiarowo-
kontrolne i pomiarowo-
diagnostyczne
.

Systemy pomiarowe
Systemy badawcze
stosowane są w
pomiarach naukowych, do
empirycznej weryfikacji hipotez
naukowych.
Systemy te są wykorzystywane w
wielu dziedzinach nauki, jak:
elektronika, fizyka, chemia,
mechanika, biologia, medycyna.

Systemy pomiarowe
Systemy pomiarowo-kontrolne
używane
są w przemyśle do automatyzacji
procesów technologicznych.
W systemach takich stosuje się zwykle
znaczne ilości czujników
rozmieszczonych na całym
kontrolowanym obiekcie i
przetworników formujących sygnały
wykorzystywane dalej przez regulatory
sterujące procesem technologicznym.

Systemy pomiarowe
Systemy pomiarowo-diagnostyczne
służą do detekcji i lokalizacji
uszkodzeń.
Celem diagnozowania jest nie tylko
stwierdzenie stanu obiektu, ale
często również wskazanie
uszkodzonego elementu.

Konfiguracje systemów
pomiarowych
• Konfiguracja systemu pomiarowego jest
to sposób połączeń jednostek
funkcjonalnych w systemie pomiarowym.
Konfiguracja określa układ dróg przepływu
informacji w systemie.
• Aktualnie są stosowane trzy podstawowe
konfiguracje systemów pomiarowych:
- gwiazdowa,
- magistralowa
- pętlowa,
- a także ich kombinacje
.

Konfiguracjensystemów
pomiarowych
• W
konfiguracji gwiazdowej
centralna
pozycja jest zarezerwowana dla
kontrolera systemu.
-
Kontroler pośredniczy w przekazywaniu
każdej informacji między pozostałymi
jednostkami funkcjonalnymi.
- Przesyłanie informacji jest możliwe
jedynie między kontrolerem a
jednostkami funkcjonalnymi.
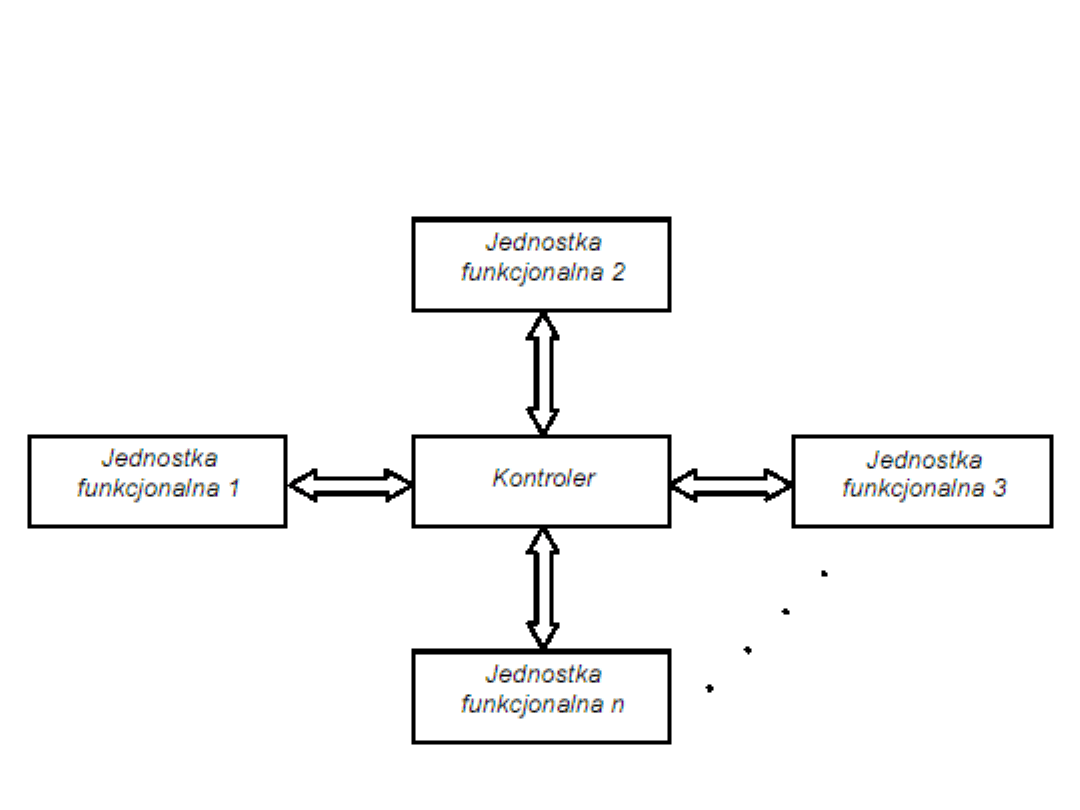
Konfiguracja gwiazdowa

Konfiguracja gwiazdowa
• Jednostka funkcjonalna nie może przesłać
informacji do innej jednostki bezpośrednio,
tylko za pośrednictwem kontrolera.
• Konfiguracja gwiazdowa jest stosowana w
prostych systemach pomiarowych, o
niewielkiej i ustalonej liczbie jednostek
funkcjonalnych.
• Rozbudowa systemu o konfiguracji
gwiazdowej, jest utrudniona.

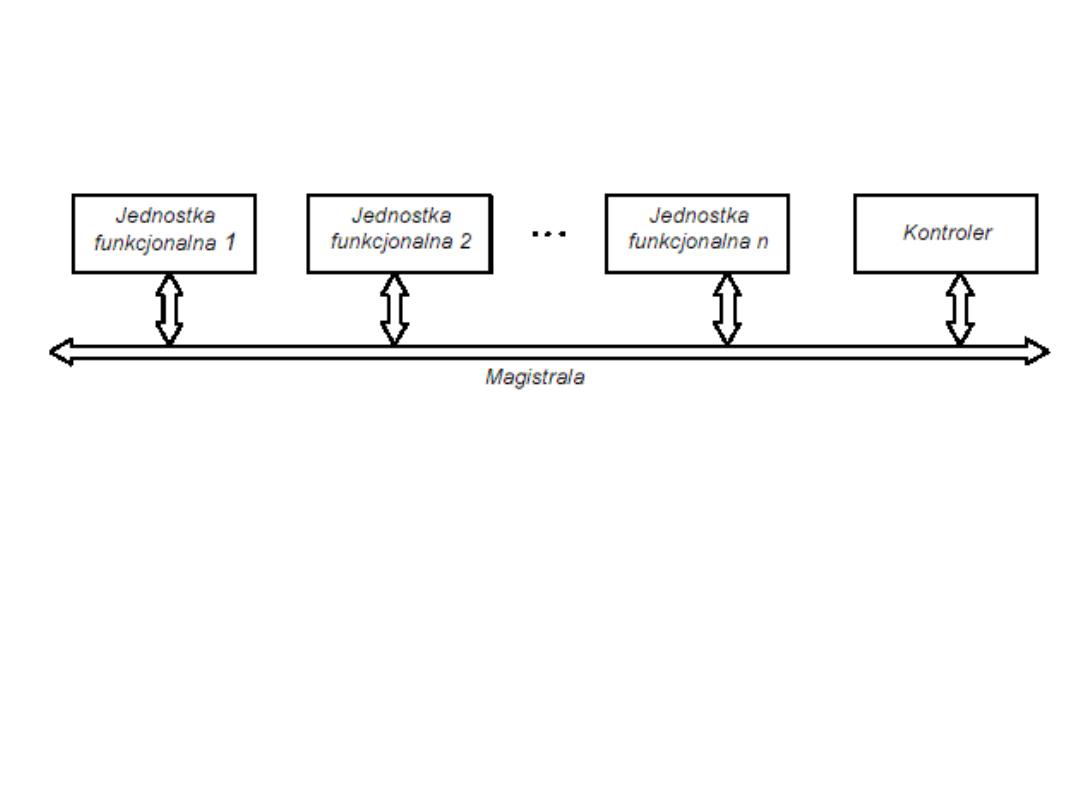
Konfiguracja magistralowa
• W
konfiguracji magistralowej
wszystkie współpracujące w systemie
urządzenia są dołączone równolegle do
magistrali cyfrowej.
• Magistrala jest zespołem linii, po
których przekazywane są wszystkie
informacje przesyłane pomiędzy
dowolnymi urządzeniami pracującymi
w systemie.
• W konfiguracji tej żadne z urządzeń
systemu nie ma wyróżnionej pozycji.

Konfiguracja magistralowa
• Kontrolerem systemu może być każde z
urządzeń dołączonych do magistrali i
mające zdolność sterowania systemem.
•
• W praktyce najczęściej stosuje się
systemy pomiarowe o konfiguracji
magistralowej, w których przesyłanie
informacji odbywa się za pośrednictwem
wieloprzewodowej magistrali
.
Konfiguracja magistralowa
W systemie o konfiguracji magistralowej
zachodzi
konieczność udzielania zezwoleń
poszczególnym urządzeniom na nadawanie
informacji, jak i powiadamianie o
konieczności przyjęcia nadawanej informacji.
Te czynności organizacyjne nazywa się
odpowiednio:
adresowaniem do nadawania
i
adresowaniem do odbioru.

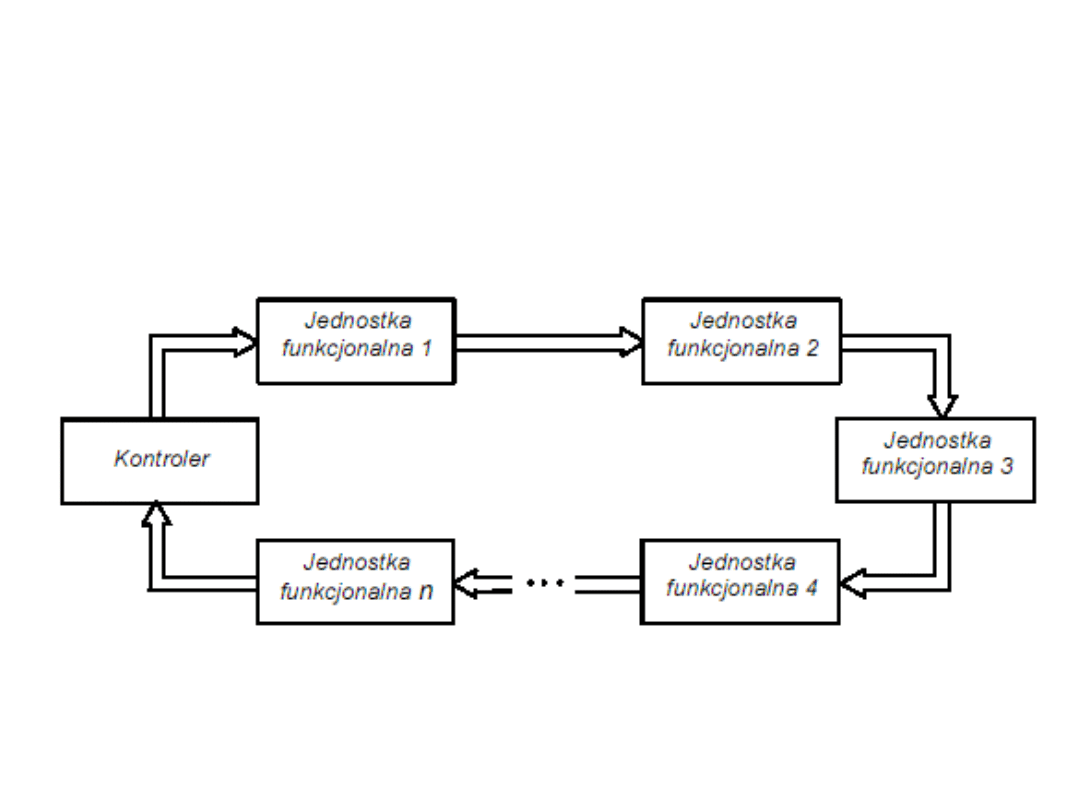
Konfiguracja pętlowa
• W
konfiguracji pętlowej
wszystkie linie
sygnałowe są w tej konfiguracji
jednokierunkowe, wskutek czego kierunek
obiegu informacji w pętli jest ustalony.
• Podobnie jak w konfiguracji magistralowej,
kontroler systemu nie zajmuje tu wyróżnionego
miejsca.
• Informacja nadawana przez kontroler wysyłana
jest do najbliższej jednostki funkcjonalnej, w
kierunku zgodnym z obiegiem pętli, gdzie
zostaje ona przyjęta i przeanalizowana.
Konfiguracja pętlowa systemu
pomiarowego

Konfiguracja pętlowa
• Powrót informacji do kontrolera oznacza, że przeszła
ona przez wszystkie urządzenia i została
wykorzystana przez te z nich, które były wcześniej
wyznaczone (zaadresowane) do odbioru. (
Jest to więc
jednocześnie potwierdzenie odbioru i zezwolenie na
nadanie następnej informacji
).
• W systemach o konfiguracji pętlowej, podobnie jak w
magistralowej, zachodzi konieczność adresowania
urządzeń do nadawania i odbioru informacji.
• W porównaniu z innymi konfiguracjami, konfiguracja
pętlowa ma:
- najmniejszą szybkość działania,
- najmniejszą liczbę linii sygnałowych.
Struktury systemów
pomiarowych
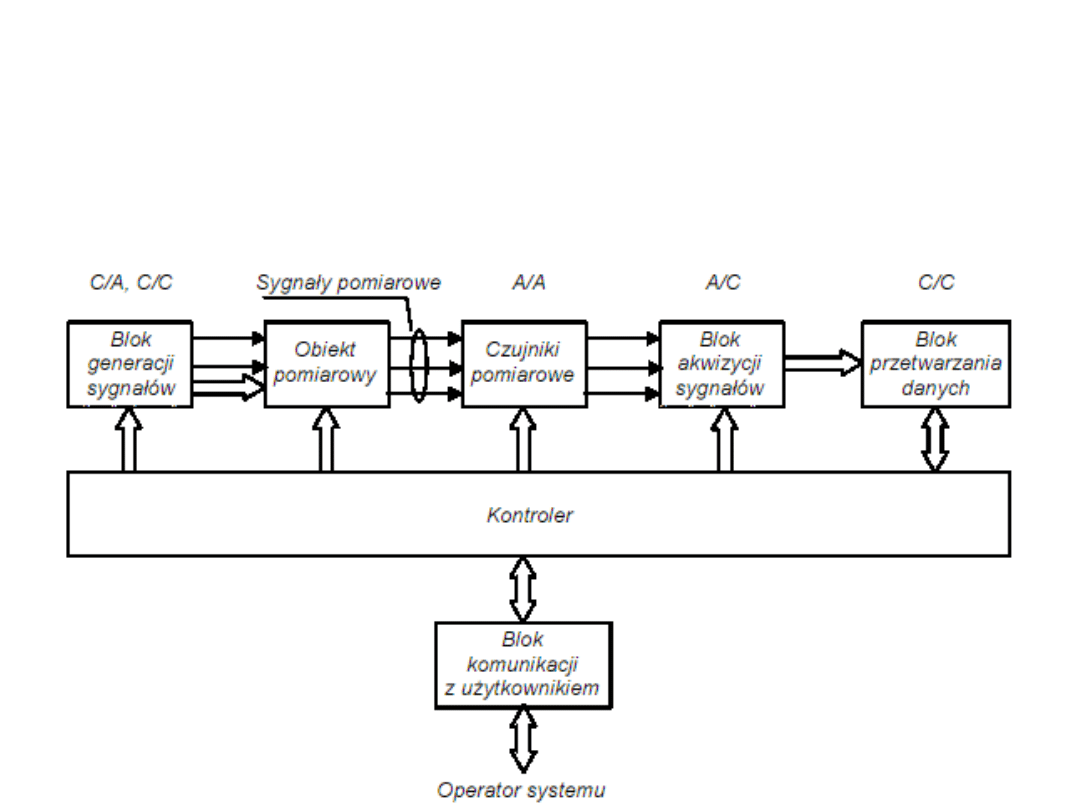
Struktura typowego systemu
pomiarowego

Elementy struktury systemu
pomiarowego
W jego skład wchodzi:
• kontroler
sterujący pracą systemu oraz zespół
jednostek funkcjonalnych,
• czujniki pomiarowe
przetwarzające wielkości
pomiarowe pochodzące z obiektu pomiaru na
sygnały elektryczne,
• blok akwizycji sygnałów
umożliwiający zbieranie
sygnałów pomiarowych i przetwarzanie analogowo-
cyfrowe (A/C),
•
blok przetwarzania danych
realizujący cyfrowe
przetwarzanie sygnałów,
• blok generacji wymuszeń
umożliwiający zwrotne
oddziaływanie na obiekt,
• blok komunikacji
z
użytkownikiem.

• Kontroler systemu
jest odpowiedzialny za
czasowo-przestrzenną koordynację działań
systemu, a więc
wybór punktów
pomiarowych
,
ustalenie warunków pomiaru
,
określenie momentu rozpoczęcia pomiaru
oraz
organizację przepływu informacji.
•
Kontroler systemu
wykonuje czynności
sterujące w systemie pomiarowym zgodnie z
programem zawartym w
pamięci
.
• Rozróżnia się kontrolery realizujące wyłącznie
stały algorytm pomiarowy
(sterowniki
układowe) oraz kontrolery realizujące
różne
algorytmy
, przez zmianę programów
wpisanych do pamięci kontrolera.

Zadania elementów
systemu
• Blok komunikacji z użytkownikiem
jest przeznaczony
do wprowadzania i odbierania informacji z systemu
przez użytkownika.
• W systemach bez komputera wprowadzanie
informacji może być dokonywane np. za pomocą
przełączników,
• W systemach komputerowych wprowadzanie danych
za pomocą klawiatury, stacji dyskietek, myszki,
pióra świetlnego.
• Wyprowadzanie informacji może odbywać się za
pomocą rejestratorów cyfrowych bądź analogowych,
monitorów ekranowych, drukarek oraz z użyciem
wpisu do pamięci dyskowej.

• Czujniki pomiarowe
przekształcają wielkości
nieelektryczne, lub trudno mierzalne wielkości
elektryczne, na łatwo mierzalne wielkości
elektryczne, takie jak napięcie stałe, częstotliwość
czy przedział czasu.
• Postęp w mikroelektronice przyczynił się do
powstania tzw.
czujników inteligentnych
, które
zintegrowane są z układem przetwarzania i
standaryzacji sygnału.
•
Czujniki te potrafią realizować funkcje
autokalibracji, linearyzować charakterystykę
przetwarzania, a także eliminować wpływ
zakłóceń.

Zadania elementów
systemu
• Blok akwizycji
pośredniczy między czujnikami
pomiarowymi a blokiem przetwarzania danych. Jego
zadaniem jest zbieranie sygnałów pomiarowych i
przekształcenie ich na postać cyfrową.
• W bloku akwizycji wykonywana jest wstępna
normalizacja sygnału analogowego (często
nazywana kondycjonowaniem sygnału) oraz
przetwarzanie napięcie-cyfra bądź czas-cyfra.
• Przetwarzanie napięcie-cyfra jest stosowane przy
pomiarach napięcia, prądu, rezystancji itp.
• Przetwarzanie czas-cyfra stosowane jest przy
pomiarach odstępu czasu, częstotliwości, okresu,
przesunięcia fazowego.
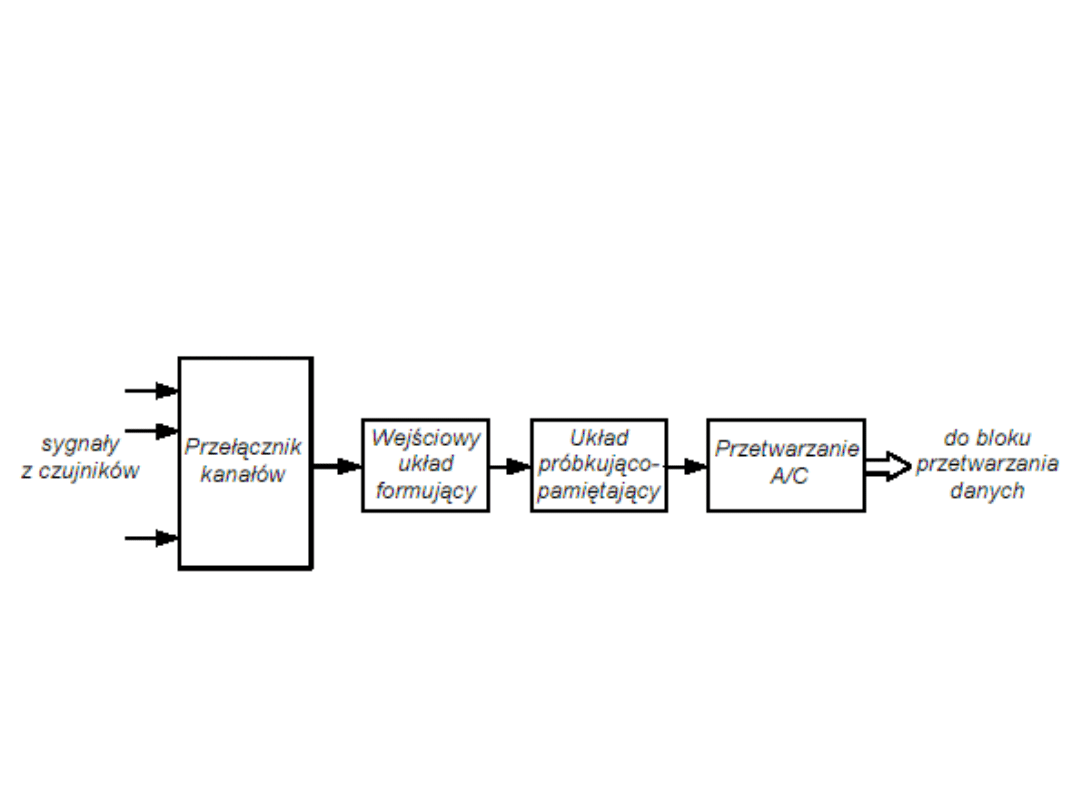
Konfiguracja bloku akwizycji

• Blok przetwarzania danych
jest odpowiedzialny
za cyfrową obróbkę sygnałów pomiarowych
zgodnie z przyjętym algorytmem.
• Jeżeli kontrolerem w systemie pomiarowym
jest komputer, to na ogół, oprócz sterowania
systemem, pełni on jednocześnie funkcje bloku
przetwarzania danych.
• W przypadku systemów wymagających
przetwarzania w czasie rzeczywistym (real
time processing) przyspieszenie obliczeń
zapewniają wydzielone bloki funkcjonalne z
procesorami sygnałowymi, realizujące złożone i
pracochłonne algorytmy przetwarzania
danych.

Zadania elementów
systemu
• Blok generacji sygnałów
wykorzystywany
jest do wytwarzania sygnałów
wymuszających (programowane źródła
napięć i prądów), do generacji sygnałów
wzorcowych oraz do wytwarzania
sygnałów sterujących elementami
wykonawczymi obiektu pomiarowego.
• Blok ten wymaga jednego lub kilku
przetworników C/A w celu wytworzenia
sygnałów analogowych.

Wirtualne przyrządy
pomiarowe
• Wirtualne przyrządy pomiarowe
składają
się z komputera ogólnego przeznaczenia i
dołączonych do niego sprzętowych bloków
funkcjonalnych.
• Funkcje i możliwości takich przyrządów
określone są zarówno przez sprzęt, jak i
oprogramowanie, a ich obsługa odbywa
się za pomocą ekranu komputerowego,
klawiatury i myszy z wykorzystaniem
graficznego interfejsu użytkownika.
• Jako komputer najczęściej wykorzystywany
jest komputer typu PC.
• Kluczową częścią przyrządu jest
oprogramowanie
,
które integruje komputer i bloki pomiarowe,
tworząc z nich przyrząd.
• Na oprogramowanie przyrządu wirtualnego składa
się
panel graficzny
przyrządu oraz
sterownik
części
sprzętowej.
• Panel graficzny na ekranie komputera odwzorowuje
płytę czołową przyrządu wirtualnego.
• Panel ten zawiera zbiór symboli graficznych,
służących do obsługi przyrządu takich jak
przełączniki, pokrętła, wskaźniki analogowe i
cyfrowe, pola znakowe lub numeryczne, pola
wykresów i inne.

Przyrząd wirtualny
• Kluczową częścią przyrządu jest
oprogramowanie
,
które integruje komputer i bloki pomiarowe, tworząc z
nich przyrząd.
• Na oprogramowanie przyrządu wirtualnego składa się
panel graficzny
przyrządu oraz
sterownik
części
sprzętowej.
• Panel graficzny na ekranie komputera odwzorowuje
płytę czołową przyrządu wirtualnego.
• Panel ten zawiera zbiór symboli graficznych,
służących do obsługi przyrządu takich jak
przełączniki, pokrętła, wskaźniki analogowe i cyfrowe,
pola znakowe lub numeryczne, pola wykresów i inne.
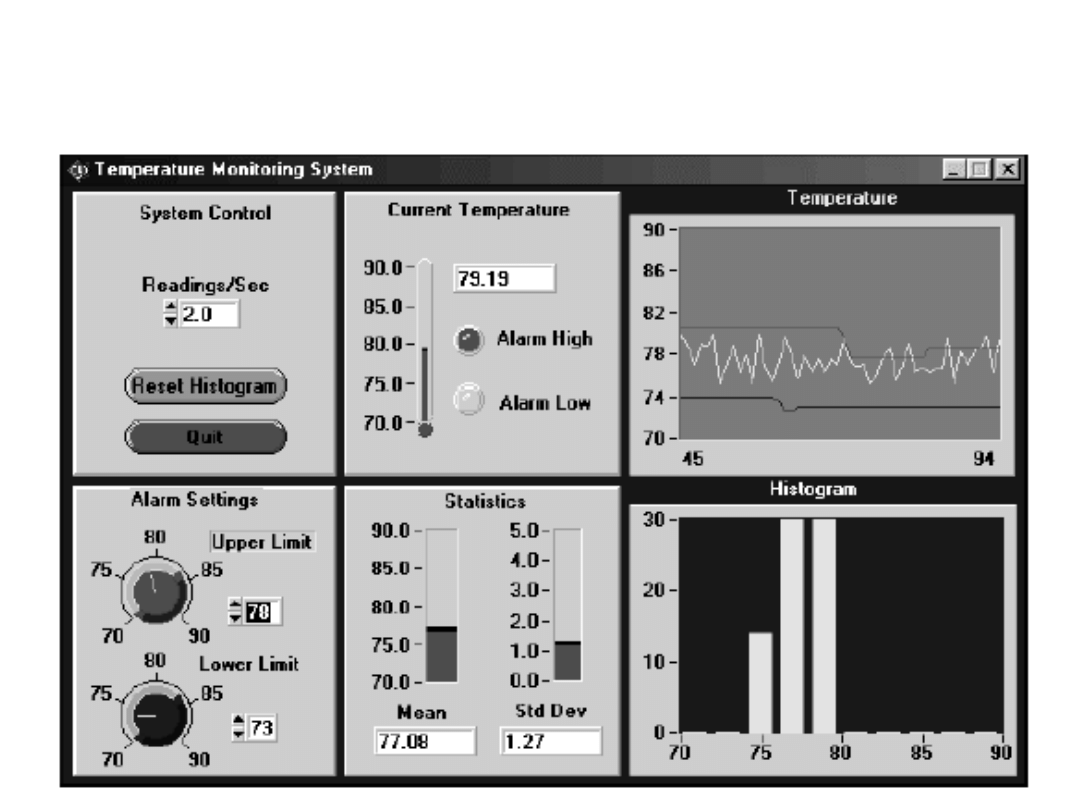
Panel wirtualnego przyrządu pomiarowego

• Cechą wirtualnego przyrządu pomiarowego
jest:
- funkcjonalna elastyczność,
- rekonfigurowalność.
• Umożliwia to stworzenie na bazie danego
sprzętowego bloku funkcjonalnego szerokiego
zbioru przyrządów wirtualnych realizujących
różnorodne funkcje i redukcję kosztów
przyrządów oraz skrócenie czasu ich
opracowania i dalszych modyfikacji.

Przyrząd wirtualny
• Cechą wirtualnego przyrządu pomiarowego
jest:
- funkcjonalna elastyczność,
- rekonfigurowalność
.
• Umożliwia to stworzenie na bazie danego
sprzętowego bloku funkcjonalnego szerokiego
zbioru przyrządów wirtualnych realizujących
różnorodne funkcje i redukcję kosztów
przyrządów oraz skrócenie czasu ich
opracowania i dalszych modyfikacji.

Interfejsy systemów pomiarowych
• Sterowanie pracą każdego systemu pomiarowego,
a także przesyłanie informacji pomiarowych
,
odbywa się za pośrednictwem
systemu interfejsu
.
• Jest to
układ komunikacyjno-informacyjny
systemu pomiarowego.
• Obowiązuje w nim ustalony zbiór reguł
obejmujących zasady zarządzania systemem
pomiarowym przez kontroler, a także ustalających
sposób kodowania informacji i jej przesyłania.
• Reguły te określają parametry elektryczne
sygnałów i metody transmisji, protokoły
komunikacyjne i metody kodowania sygnałów,
wymagania mechaniczne na gniazda
połączeniowe i rozmieszczenie w nich
poszczególnych sygnałów.

Interfejsy
Ze względu na
rodzaj transmisji
interfejsy
możemy podzielić na szeregowe i równoległe.
• W
interfejsie szeregowym
poszczególne bity
danego słowa przesyła się kolejno, bit po bicie.
Ze względu na niskie koszty okablowania,
gdzie wykorzystuje się tylko dwa lub trzy
przewody, interfejsy szeregowe stosuje się
przy przesyłaniu sygnałów na duże odległości.
Najbardziej znanym interfejsem szeregowym
jest interfejs
RS-232C
oraz jego
zmodyfikowana wersja
RS-485.

Interfejsy
• W
interfejsach równoległych
przesyłaną
informację dzieli się na słowa (np. po 8 lub
16 bitów). Wszystkie bity danego słowa
przesyła się jednocześnie (równolegle),
natomiast poszczególne słowa przesyłane
są szeregowo, jedno po drugim (
dzięki
temu transmisja równoległa jest znacznie
szybsza od szeregowej
).
• Wadą interfejsów równoległych jest
większy koszt okablowania – każdy bit
danego słowa wymaga oddzielnej linii.

Interfejs RS 232C
• Standard interfejsu
RS-232
został określony już w
1962 roku.
• Jego poprawioną wersję RS-232C zdefiniowano w
1969 roku.
• W standardzie RS-232 określono sposób połączenia
urządzeń w celu szeregowego przesyłania danych.
• W skład ogólnej struktury układu transmisyjnego
wchodzą dwa urządzenia końcowe dla danych
DTE
(ang.
Data Terminal Equipment
) np. komputery
połączone kanałem teletransmisji.
• Ponieważ bezpośrednie połączenie takich urządzeń z
kanałem teletransmisji jest niemożliwe, wykorzystuje
się dodatkowe urządzenia komunikacyjne dla
przesyłu danych
DCE
(ang.
Data Communication
Equipment
)
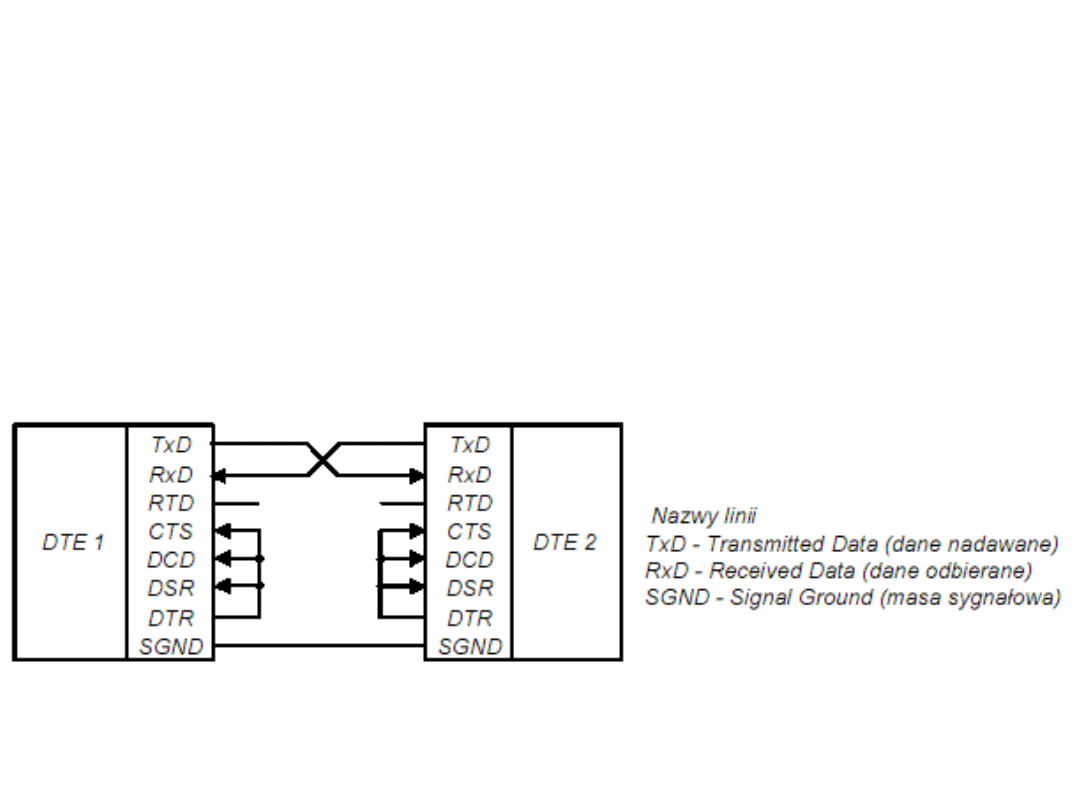
Interfejs RS 232C
Celem interfejsu RS-232 jest połączenie urządzenia DTE z
urządzeniem DCE.
•
Przykład najprostszego połączenia przyrządu
pomiarowego z komputerem z użyciem interfejsu RS-
232.
Wykorzystane w nim są tylko 3 linie spośród ogólnej liczby
21 linii interfejsu.
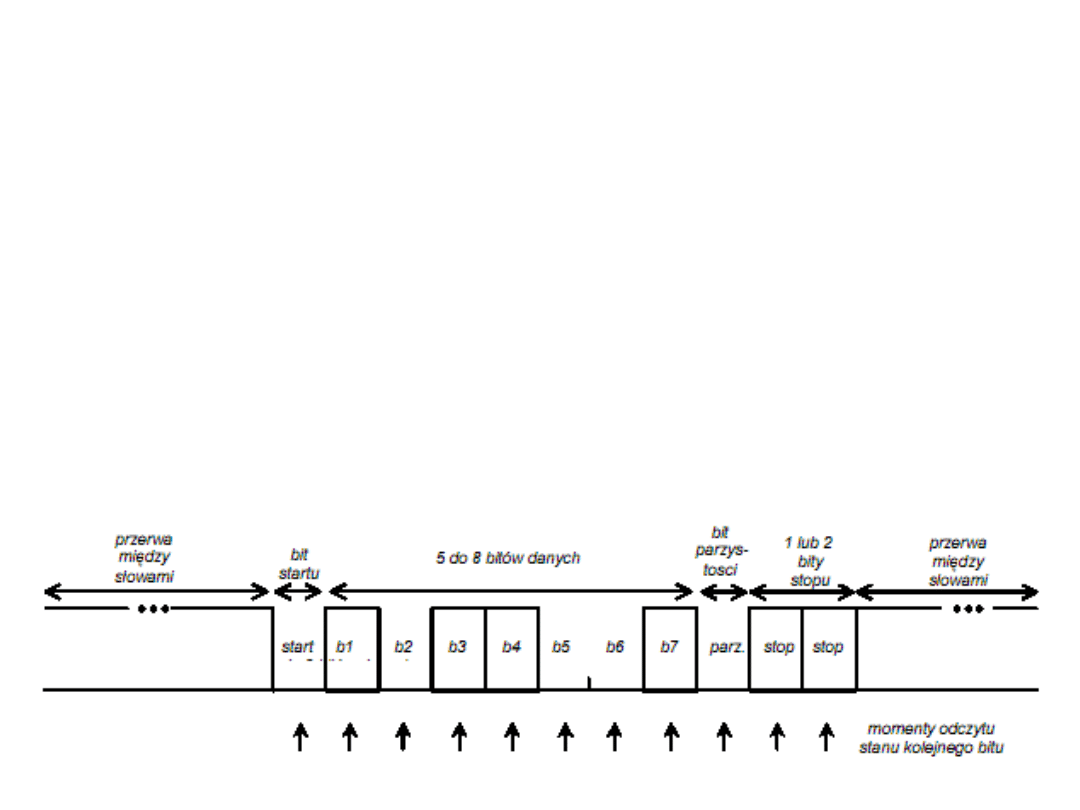
Interfejs RS 232C
Przy wykorzystaniu interfejsu RS 232 najczęściej
stosuje się transmisję asynchroniczną start-
stopową, w której słowa w postaci ciągu bitów
przesyłane są asynchronicznie, natomiast bity
w poszczególnym słowie przesyłane są
synchronicznie.
Interfejs RS 232C
• Maksymalna prędkość transmisji zależy od
długości połączeń.
• Zaleca się prędkości
do 20 kb/s
, m.in. 150,
300, 600, 1200, 2400, 4800, 9600, 19200 kb/s.
• Długość połączeń nie powinna przekraczać
zwykle 15 m
.
• Przy krótkich połączeniach prędkość transmisji
można zwiększyć
do 112 kb/s
.
• Zwiększenie zasięgu ponad 15 m umożliwia
zastosowanie tzw. pętli prądowej.
Stan „1” reprezentuje prąd o wartości 20 mA,
stan „0” – brak przepływu prądu.
Interfejs RS 232C
• Zastosowanie interfejsu RS-232 w
warunkach przemysłowych jest
ograniczone.
• Przyczyną tego jest brak dostatecznych
zabezpieczeń przed zakłóceniami oraz
ograniczona szybkość i odległość
transmisji.
• Ograniczenia te spowodowały
powstanie nowych standardów
transmisji szeregowej.

Interfejs RS 485
• Najbardziej popularnym z nich stał się
opracowany w 1983 roku standard
RS-485
.
• Najważniejsze cechy tego standardu to
możliwość dołączenia
do 32 odbiorników i
nadajników
oraz zwiększenie prędkości
transmisji
do 10 Mb/s
przy maksymalnej
odległości
1200 m
.

Standard GPIB
• Przesyłanie przez magistralę informacji w
postaci bajtów odbywa się
asynchronicznie,
ze zwrotnym potwierdzeniem odbioru
.
• Do magistrali można dołączyć jednocześnie
do 15 urządzeń
.
• Długość kabla między dwoma sąsiednimi
przyrządami nie powinna przekraczać
2 m
,
• Całkowita długość wszystkich kabli
20 m
.
• Przez magistralę można przesyłać dane z
szybkością
do 1000 kb/s
.
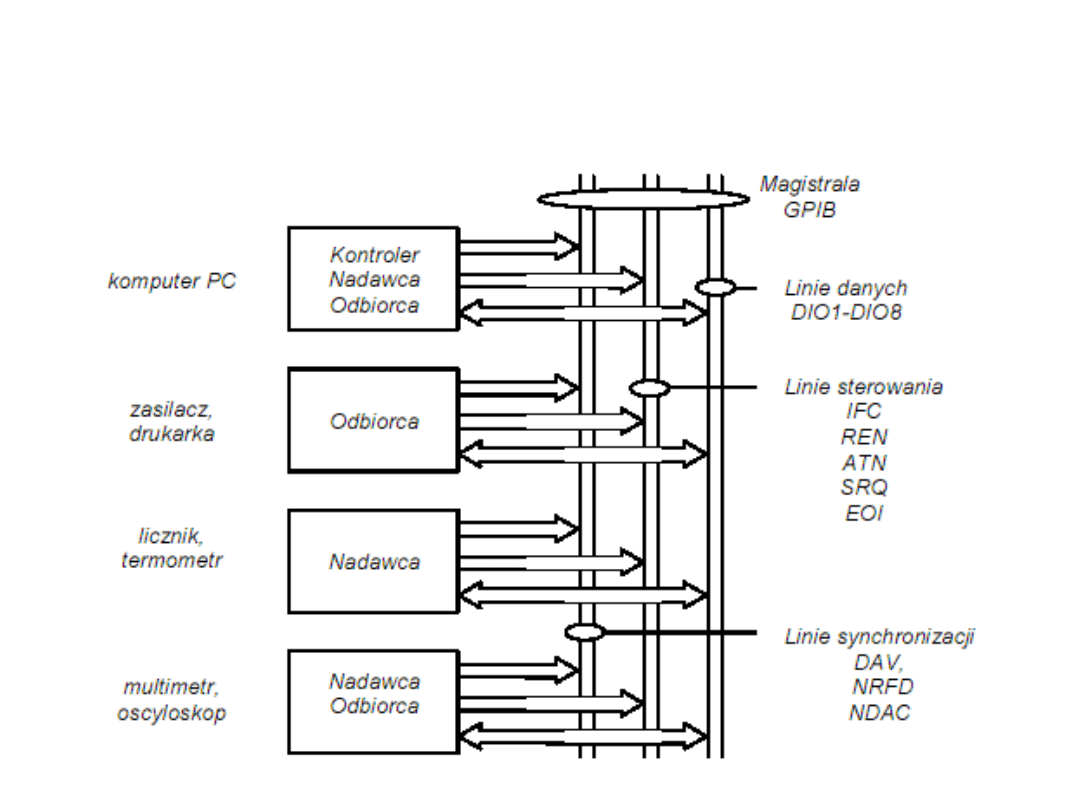
Architektura systemu
pomiarowego z magistralą GPIB

System pomiarowy z
magistralą GPIB
• Magistrala składa się z 16 linii sygnałowych: 8 linii
danych, 3 linii synchronizacji i 5 linii sterowania.
• Linia
IFC
(ang. Interface Clear – zerowanie interfejsu)
służy do wprowadzenia wszystkich przyłączonych do
magistrali urządzeń w określony stan początkowy.
• Linia
REN
(ang. Remote Enable – sterowanie zdalne)
służy do przełączania przyrządów na zdalne sterowanie,
dokonywane z magistrali GPIB.
• Linia
SRQ
(ang. Service Request – żądanie obsługi)
sygnalizuje kontrolerowi, że jedno lub więcej urządzeń
przyłączonych do magistrali żąda obsługi, np. w celu
przesłania wyniku pomiaru.

System pomiarowy z magistralą
GPIB
• Linia
EOI
(ang. End or Identify – koniec lub
identyfikacja) w trybie przesyłania danych sygnalizuje
bajt kończący transmisję natomiast w trybie przesyłania
instrukcji sygnalizuje, że kontroler dokonuje sprawdzenia,
które z przyłączonych urządzeń żądało obsługi.
Grupa trzech linii synchronizacji umożliwia asynchroniczne
przesyłanie informacji ze zwrotnym potwierdzeniem
odbioru.
• Linia
DAV
(ang. Data Valid – dane ważne) służy
nadajnikowi do poinformowania, że na liniach DIO jest
nowy bajt danych.
• Linia
NRFD
(ang. Not Ready for DATA – nie gotowy na
dane) podaje informację, że nie wszystkie urządzenia są
gotowe do odbioru danych. Przesłanie danych może
rozpocząć się gdy wszystkie urządzenia wytypowane jako
odbiorniki zgłoszą swoją gotowość.

Urządzenia zewnętrzne GPIB
Urządzenie dołączone do magistrali GPIB można
podzielić na cztery grupy
:
-
odbiorcy
- mogą jedynie odbierać dane (np.
zasilacz programowany, komutator, drukarka),
-
nadawcy
– mogą jedynie wysyłać dane (np.
licznik, termometr),
-
nadawcy/odbiorcy
– mogą wysyłać lub odbierać
dane (np. multimetr, oscyloskop cyfrowy),
-
kontroler
– jednostka sterująca, która może
również spełniać rolę nadawcy lub odbiorcy (np.
komputer).
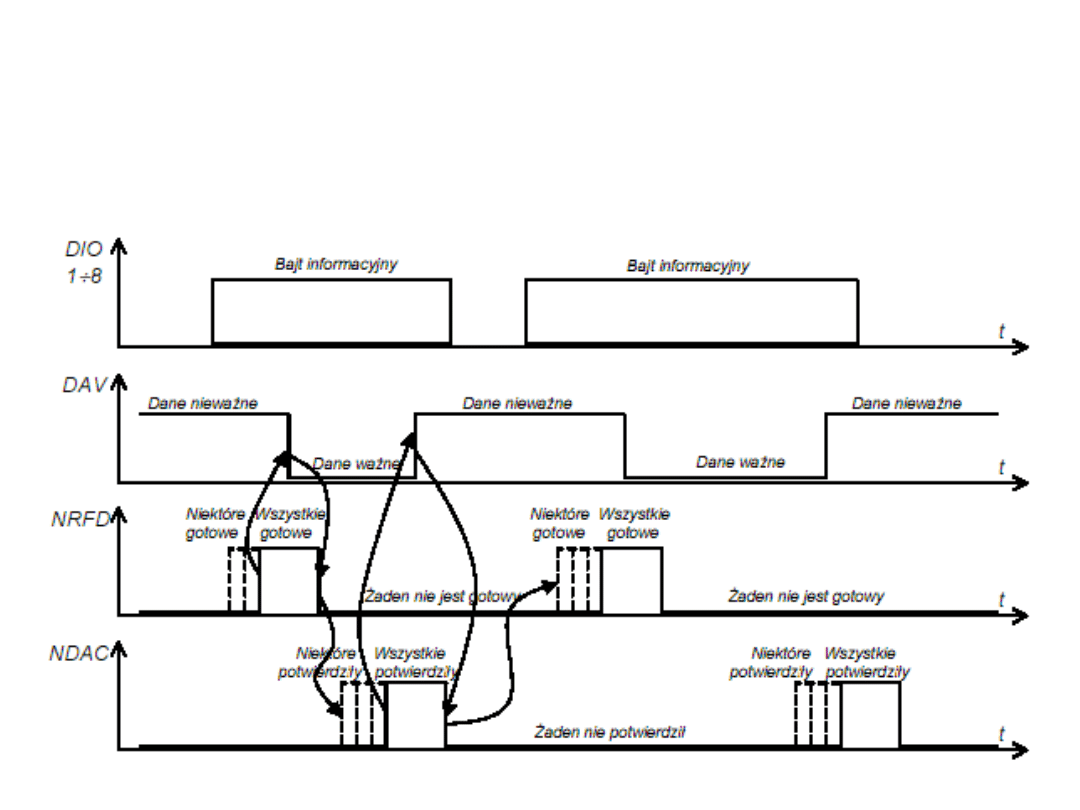
Procedura wymiany informacji
nadawcy z kilkoma odbiorcami na
magistrali GPIB

Magistrale komputerowe w
zastosowaniach pomiarowych
Uniwersalna magistrala szeregowa
USB
• Uniwersalna magistrala szeregowa
USB
(ang.
Universal Serial Bus
) została
wprowadzona do komputerów w 1995
roku.
• Charakteryzuje się ona łatwą instalacją
dołączonych do niej urządzeń –
dołączone do portu USB urządzenia
mogą być z niego zasilane oraz można
je łączyć i rozłączać w trakcie pracy
komputera.

Magistrala USB
• Magistrala USB
wykorzystuje
kabel
czterożyłowy
, w którym są
dwa
przewody sygnałowe
i
dwa przewody
zasilania
.
• Maksymalna szybkość transmisji to
12
Mb/s
, a w wersji
USB 2.0 480 Mb/s
.
• Zaletą magistrali jest łatwa rozbudowa
– przy pomocy koncentratorów
magistrala pozwala na
dołączenie do
127 urządzeń
.

Magistrala szeregowa
IEEE-1394 Fire Wire
• Magistrala szeregowa Fire Wire została
wprowadzona przez firmę Apple Computer
w 1986 r.
• Magistrala służy do łączenia zarówno
urządzeń domowych (cyfrowe kamery,
aparaty fotograficzne, magnetowidy) jak i
urządzeń przemysłowych, w tym
przyrządów pomiarowych.

Magistrala szeregowa
IEEE-1394 Fire Wire
• Magistrala Fire Wire jest
czteroprzewodowa
(dwa przewody
sygnałowe i dwa przewody zasilana) oraz
umożliwia dołączanie i odłączanie
urządzeń w trakcie pracy bez konieczności
wyłączania zasilania.
• Maksymalna liczba urządzeń dołączonych
do magistrali wynosi
64
.
• Szybkość transmisji wynosi
do 3200 Mb/s
dla magistrali w wersji IEEE1394b.

Interfejs równoległy Centronics
• Interfejs równoległy Centronics wykorzystywany
jest w komputerze do dołączenia drukarki. Można
go również wykorzystać do dołączenia urządzeń
pomiarowych.
• Posiada on
8 bitową równoległa szynę danych
oraz
kilka linii sterujących
, które można również
wykorzystać do przesyłania danych.
• Maksymalna szybkość przesyłanych danych w
najnowszym trybie pracy interfejsu
EPP
(ang.
Enhanced Parallel Port
) i
ECP
(ang.
Enhanced
Capability Port
) wynosi
do 500 kB/s
.
Transmisja danych pomiarowych
na duże odległości
Łączenie sprzętu pomiarowego przez sieć
Ethernet
• Ethernet jest rodzajem sieci lokalnej, opracowanej w
1976 roku. Ethernet umożliwia
przesyłanie danych
przez skrętkę, kabel współosiowy lub światłowód
, z
prędkością
10 Mb/s
, a w wersji Fast Ethernet
100
Mb/s
.
• Połączenie przyrządów pomiarowych z
wykorzystaniem Ethernetu pozwala na budowę
rozproszonych systemów pomiarowych o dużym
zasięgu.
• Przyrządy pomiarowych wyposażone w jeden ze
standardowych interfejsów pomiarowych łączy się z
siecią Ethernet z wykorzystaniem odpowiednich
modułów pośredniczących. Dostępne są moduły
GPIB/Ethernet, RS-232/Ethernet/, RS-
485/Ethernet.

Systemy pomiarowe z
wykorzystaniem
radiomodemów
• W przypadku gdy obiekt pomiaru znajduje się
w trudnodostępnym miejscu, lub budowa linii
przewodowej jest kosztowna, stosuje się w
systemach pomiarowych przesyłanie danych
przez wydzielone kanały radiowe z
wykorzystaniem radiomodemów.
• Zadaniem radiomodemów jest
emitowanie i odbieranie sygnałów
radiowych, przetwarzanie danych
cyfrowych na emitowane sygnały oraz
przetwarzanie odebranych sygnałów na
dane cyfrowe.

Systemy pomiarowe z
wykorzystaniem
radiomodemów
• Radiomodemy wyposażone są najczęściej w
interfejs RS-232 lub RS-485
, przez który łączą
się z przyrządami pomiarowymi.
• Systemy radiomodemowe umożliwiają
transmisję danych na odległość od ok. 100 m
do 100 km
.
•
Radiomodemy wykorzystują wybrane pasma
częstotliwości dla radiokomunikacji
przemysłowej i wymagają zezwolenia
Państwowej Agencji Radiokomunikacji (PAR).

Systemy pomiarowe z wykorzystaniem
telefonii komórkowej GSM
•
Gdy obiekt pomiaru lub odbiorca wyników
znajdują się w ruchu np. w poruszającym się
pojeździe lub gdy odległość między obiektem
pomiaru i odbiorcą wyników jest bardzo duża
można zastosować w systemie pomiarowym
cyfrowy system telefonii ruchomej GSM
(ang.
Global System of Mobile
Communications
).
•
Funkcje bezprzewodowego terminala oprócz
telefonu komórkowego może również realizować
komputer typu laptop z kartą
PCMCIA
pełniącą
funkcję telefonu komórkowego.

Przesyłanie danych można
realizować z wykorzystaniem jednej z
kilku metod:
1.
Transmisja bez zestawiania połączeń SMS
.
Transmisja umożliwia realizację usługi
SMS
(ang.
Short
Message Service
), czyli przesyłania krótkich
komunikatów alfanumerycznych o długości
do 160
znaków
do innych stacji ruchomych.
2. Transmisja z komutacją łączy (w skrócie transmisja
komutowana).
-
SDT
(ang.
Switched Data Transfer
) - standardowa
transmisja danych realizowana w jednym kanale
rozmównym, szybkość transmisji
9.6 kb/s
.
-
HSCD
(ang.
High Speed Circuits Switched Data
) –
szybka, wielokanałowa transmisja danych realizowana
przez jeden do czterech kanałów rozmównych, z
szybkością od
14.4 kb/s
przy wykorzystaniu jednego
kanału rozmównego do
57.6 kb/s
z wykorzystaniem
czterech kanałów.

Przesyłanie danych można
realizować z wykorzystaniem
jednej z kilku metod:
3.
Transmisja z komutacją pakietów
(w
skrócie transmisja pakietowa). Umożliwia
realizację usługi
GPRS
(ang.
General
Packed Radio Service
), czyli nadawania i
odbioru pakietów danych z adresem
internetowym w nagłówku. Maksymalna
prędkość transmisji danych wynosi
115.2
kb/s
.
Zaletą transmisji GPRS jest koszt
proporcjonalny do liczby przesyłanych
danych , a nie do czasu połączenia.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
Wyszukiwarka
Podobne podstrony:
Podstawy metr wykł 4 2008
Podstawy metr wykł 7 2010 WMP1
Podstawy metr wykł 5 2010 niepewnosc bledy
Podstawy metr wykł11 2008
Podstawy metr wykł1 2008
Podstawy metr wykł6 2008
Podstawy metr wykł13 2008 Gwinty, koła zębate
Podstawy metr wykł13 2008
Podstawy metr wykł 6 2010 sprzet pom
Podstawy metr wykł3 2008
Podstawy metr wykł 8 2010 tol geom
więcej podobnych podstron