
Poruszające się ciało traktujemy jako
punkt materialny a wtedy możemy
opisać jego ruch a co więcej
konstruować równania ruchu

Kinematyka punktu
materialnego
Mając układ współrzędnych i przyjmując, że
ciała są punktami materialnymi (koncepcja
środka masy) możemy opisać ich ruch.
Będzie to oznaczało, że w każdej chwili
czasu mamy dane położenie prędkość i
przyspieszenie. Poruszające się ciało będzie
wykonywać obroty (oczywiście wokół środka
masy) ale to już zupełnie inna historia czyli
kinematyka i dynamika ruchu obrotowego
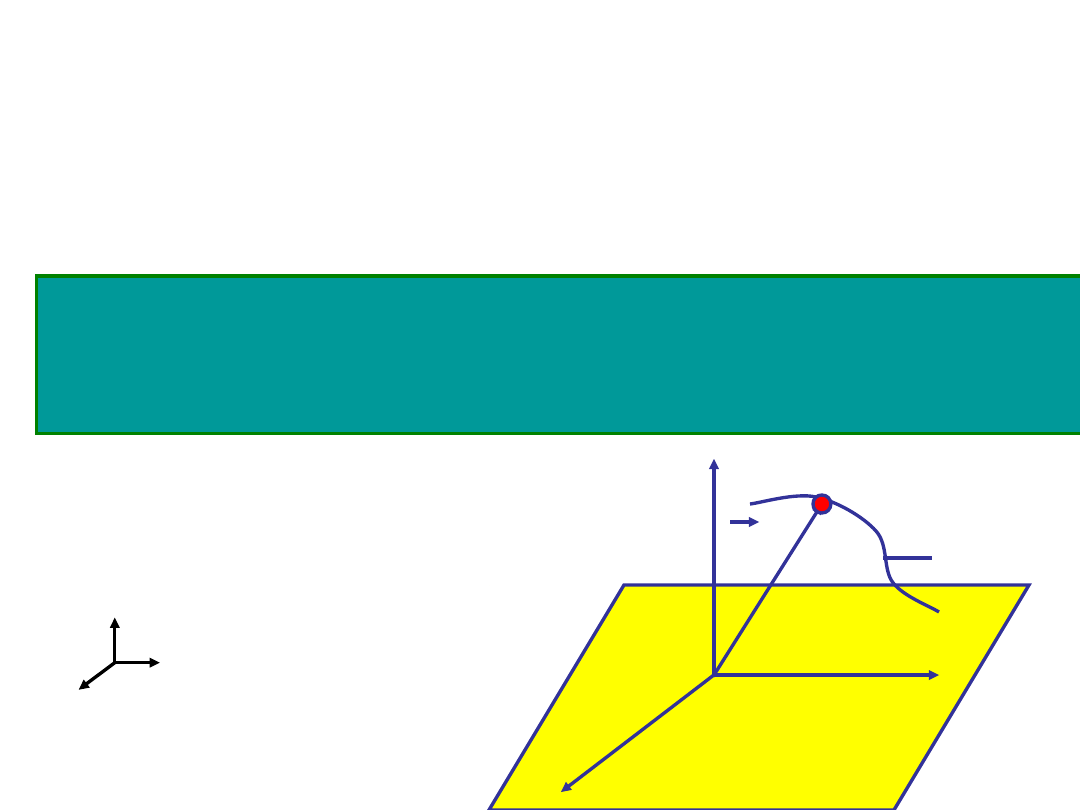
Jeżeli położenie punktu zmienia się
w czasie to
w układzie współrzędnych
prostokątnych
ruch ten możemy opisać w
następujący sposób
)
)
(
ˆ
)
(
ˆ
)
(
ˆ
)
(
t
z
k
t
y
j
t
x
i
t
r
ˆk
ˆi
ˆj
Zakładamy, że układ jest prawoskrętny
ale może nie być : )
tor ruchu
x
y
r(t)
P(x(t),y(t),z(t))
Wersory możemy zapisywać na różne sposoby.
W trakcie ćwiczeń używać będziemy wersji
trzeciej.
x, y i z są współrzędnymi kartezjańskimi.
Współrzędne punktu P możemy również
zapisać we współrzędnych sferycznych.
k
k
i
z
j
j
i
y
i
i
i
x
z
y
x
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
0
0
0
cos
sin
sin
cos
sin
r
z
r
y
r
x
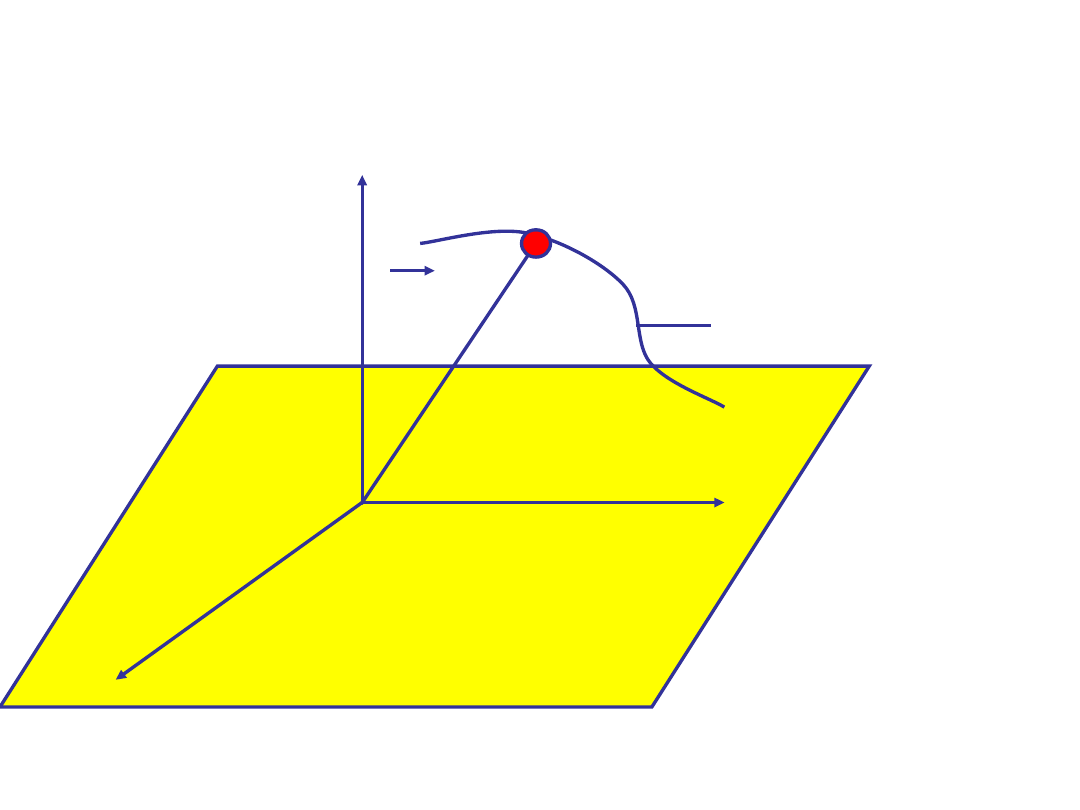
W zależności od tego, czy tor jest linią krzywą
czy prostą, mówimy o
ruchu krzywoliniowym
lub
prostoliniowym.
P(x(t),y(t),z(t))
z
tor
x
y
r(t)
.
Prędkość i przyśpieszenie
jako pochodna
wektora położenia
i prędkości
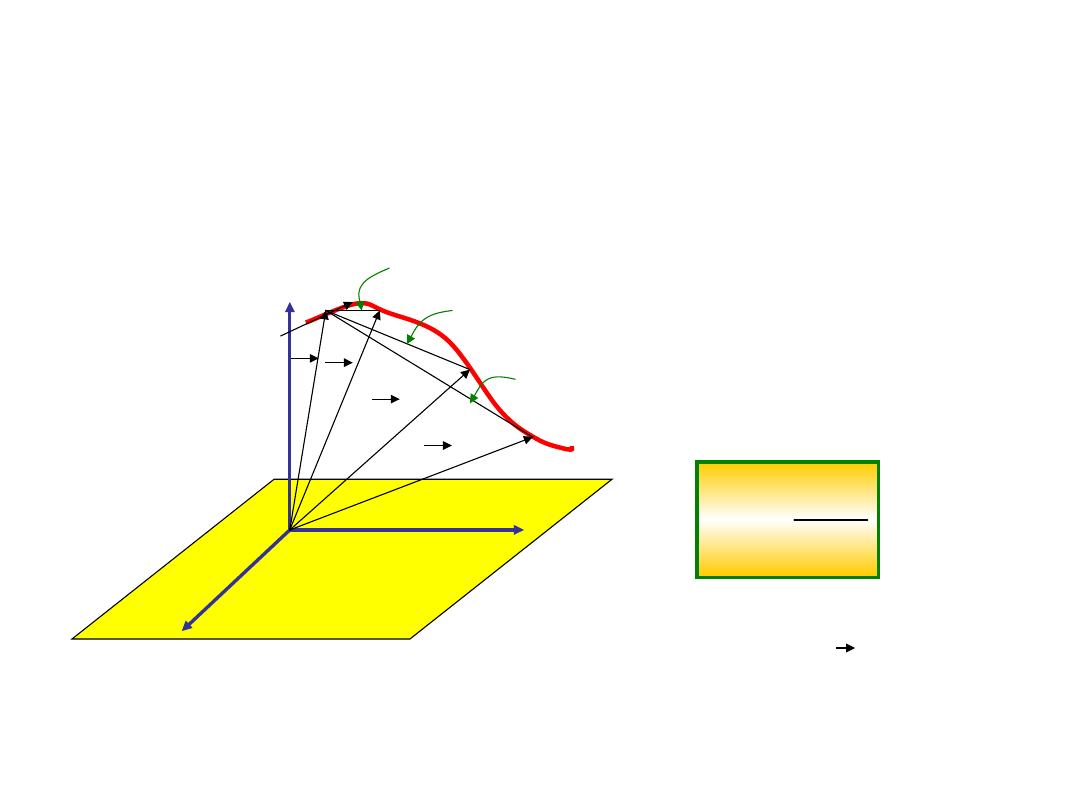
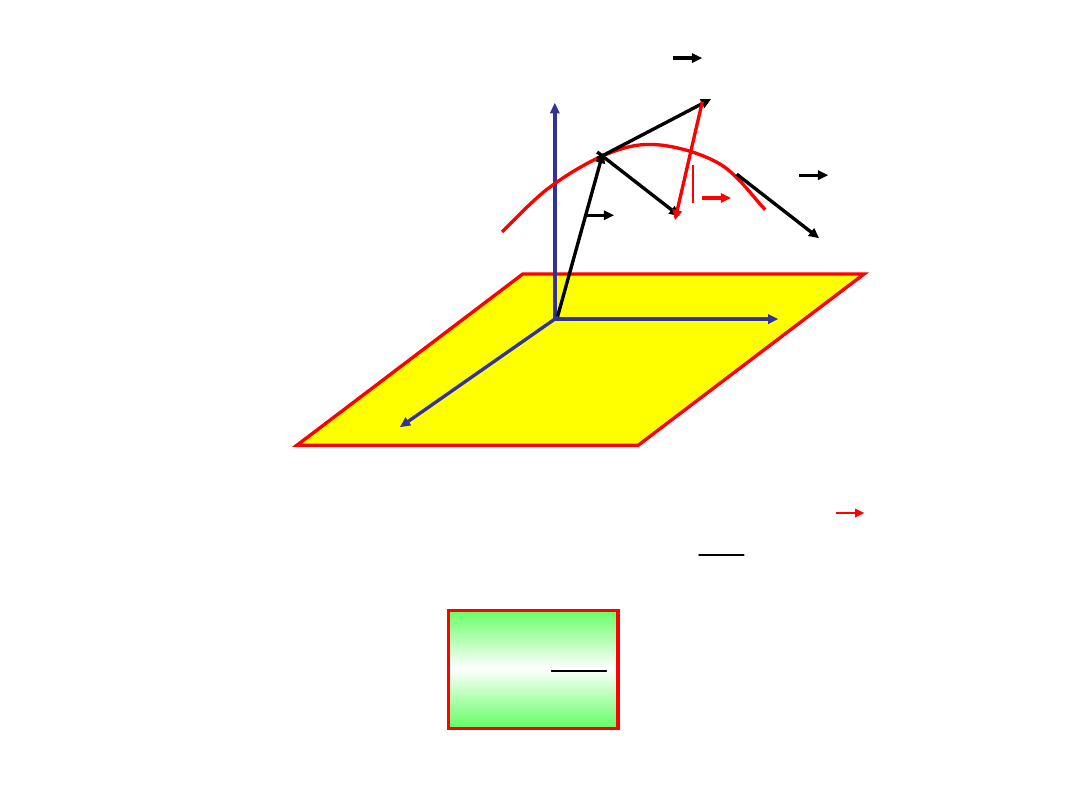
Interesuje nas prędkość jakiegoś ciała w
konkretnym punkcie P. W jaki sposób możemy ją
obliczyć?
r
1
r
2
r
3
P
1
P
2
P
3
P
x
y
z
r
r
1
r
3
r
2
t
1
Zacznijmy skracać odstępy
czasu w których określamy
położenie ciała.
Każdorazowo konstruujemy
wektor prędkości średniej
n
n
n
t
r
v
Gdy skracamy
nieograniczenie
odstęp czasu t 0, wartość bezwzględna wektora
r / t dąży do
pewnej wartości granicznej.
z
v
1
x
y
tor
P
1
P
2
v
2
v
r
1
Z rysunku widzimy, że w stosunku do
punktu P
1
w punkcie P
2
nastąpiła zmiana
prędkości
w czasie t.
Średnie
przyśpieszenie definiujemy jako
:
t
a
śr
v
v
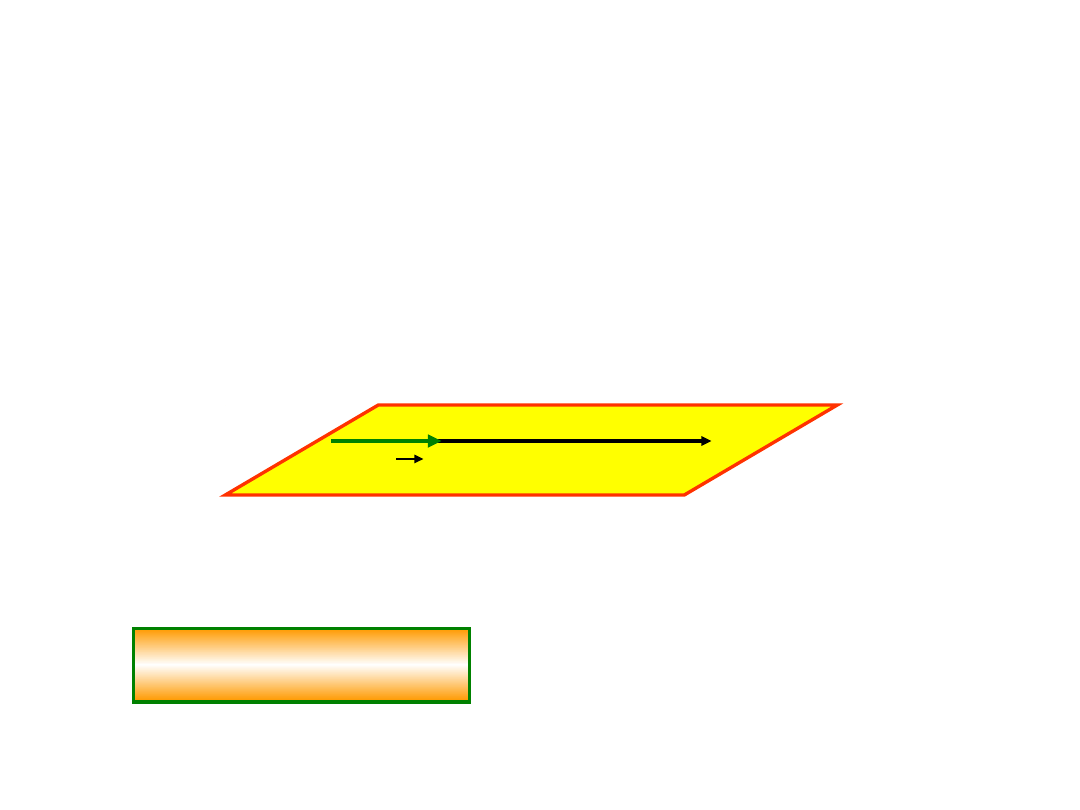
Ruch prostoliniowy
Jeżeli tor ruchu ciała jest linią prostą, to
zawsze możemy tak dobrać układ
współrzędnych, aby jedna z jego osi
pokrywała się z torem. Zwykle wybiera się oś
x.
x
r
x
i
t
x
t
x
t
r
ˆ
)
(
)
(
)
(
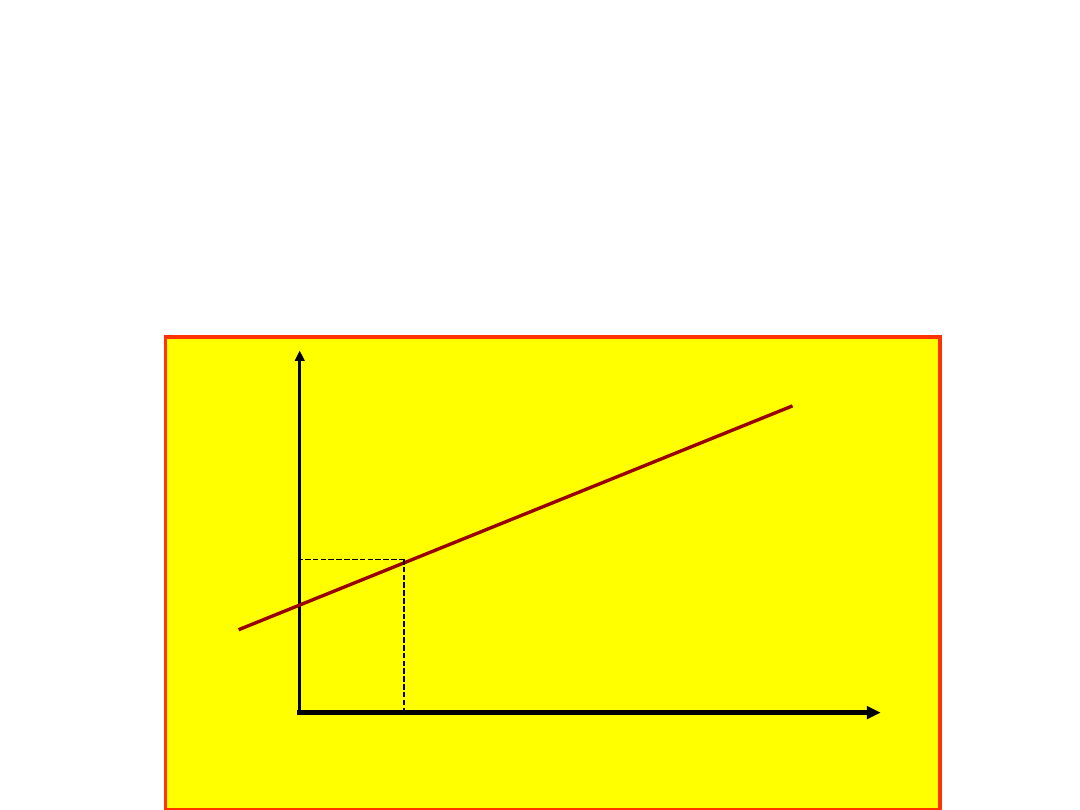
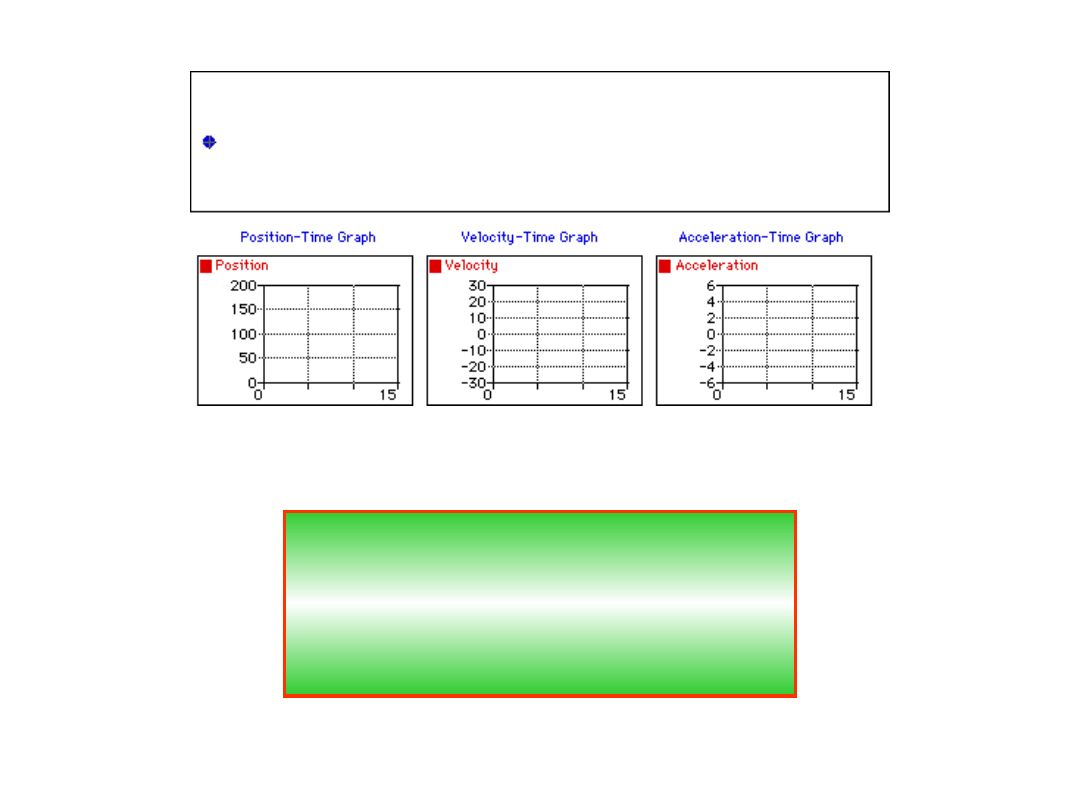
Ruch jednostajny
Ruch jednostajny, jest to taki ruch, w którym
prędkość jest stała, v=const.
.
x jest przebytą przez ciało drogą, którą zwykle
oznaczaliśmy przez s. Wykres drogi od czasu
ma więc postać:
s
t
x=x
0
+
v(t
-t
0
)
t
0
x
0
Ruch jednostajnie zmienny jest to ruch ze
stałym przyśpieszeniem a = const. Gdy a > 0
ruch nazywamy przyśpieszonym, a gdy a < 0
ruch jest opóźniony.
Ruch jednostajnie
zmienny
W celu wyliczenia prędkości z jaką porusza się ciało
musimy rozwiązać równanie:
nie martwcie się to dla
Orłów
)
t
(t
a
v
v
dt
a
dv
dt
a
dv
0
0
t
t
v
v
0
0
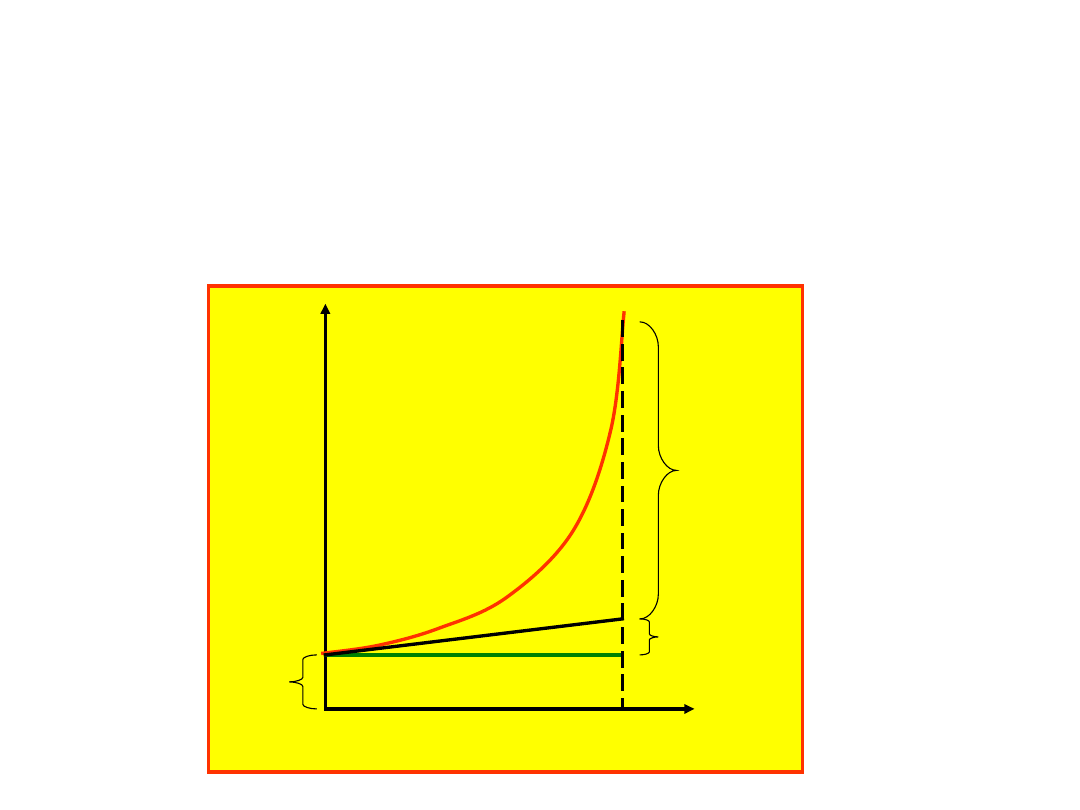
t
s=x
x
0
v
0
t
1/2at
2
Narysujmy drogę
którą ciało przebywa w czasie t
przy założeniu, że t
o
= 0.
x
y
g = -g i
y
v
0
h
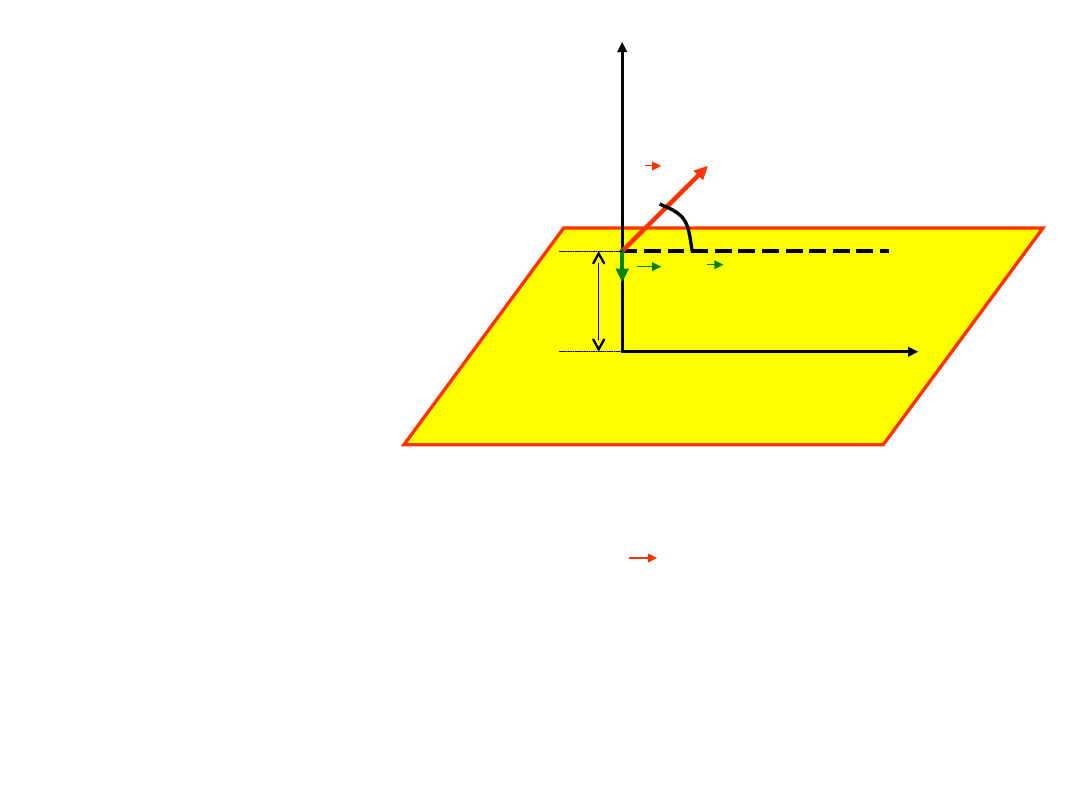
W polu ciężkości na wysokości h
wyrzucamy pod kątem do poziomu z
prędkością
v
0
jakieś ciało.
Możemy tu rozróżnić następujące przypadki:
Rozważmy
następujący ruch.
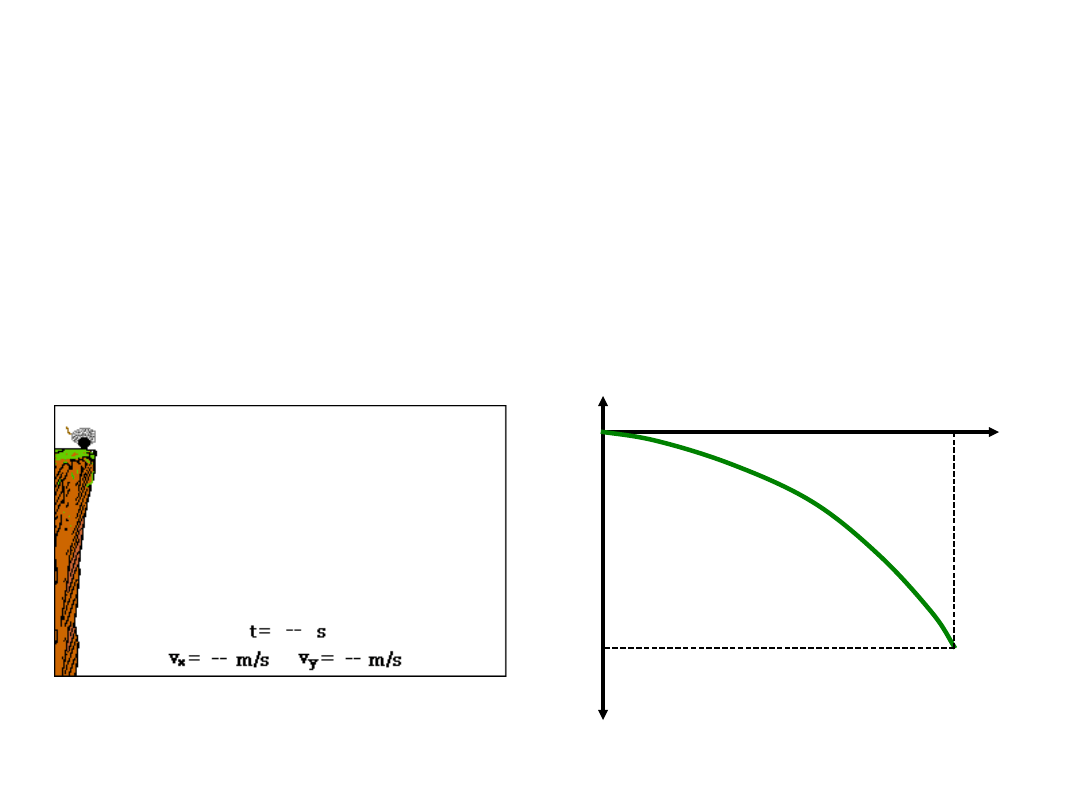
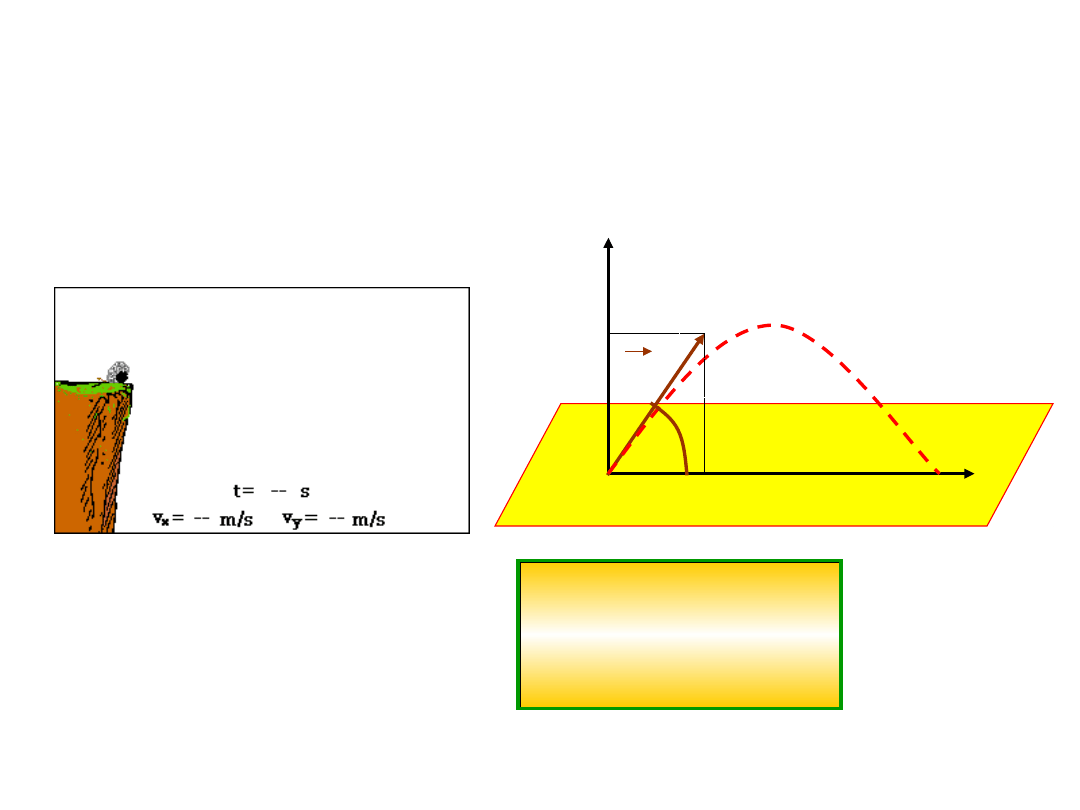
Rzut poziomy
Rzut ten jest przypadkiem 2 w Tabeli 1.
Zajmijmy się następującym problemem. Kula
armatnia została wystrzelona poziomo ze stałą
prędkością v
0x
=100 m/s. Kula spadła na ziemię
w odległości 1200 m od miejsca wystrzelenia .
Pytamy się o długość drogi pionowej jaką
przebyła kula przy zaniedbaniu oporu
powietrza.
x
y
x = 1200 m
y = ?
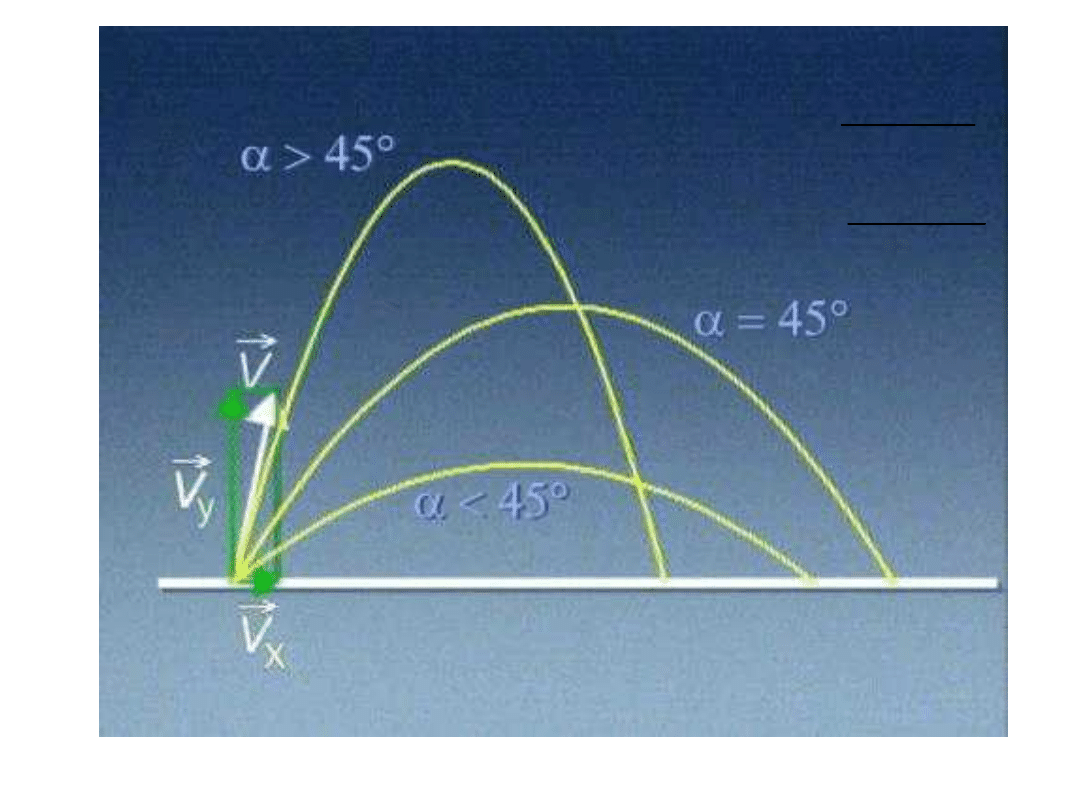
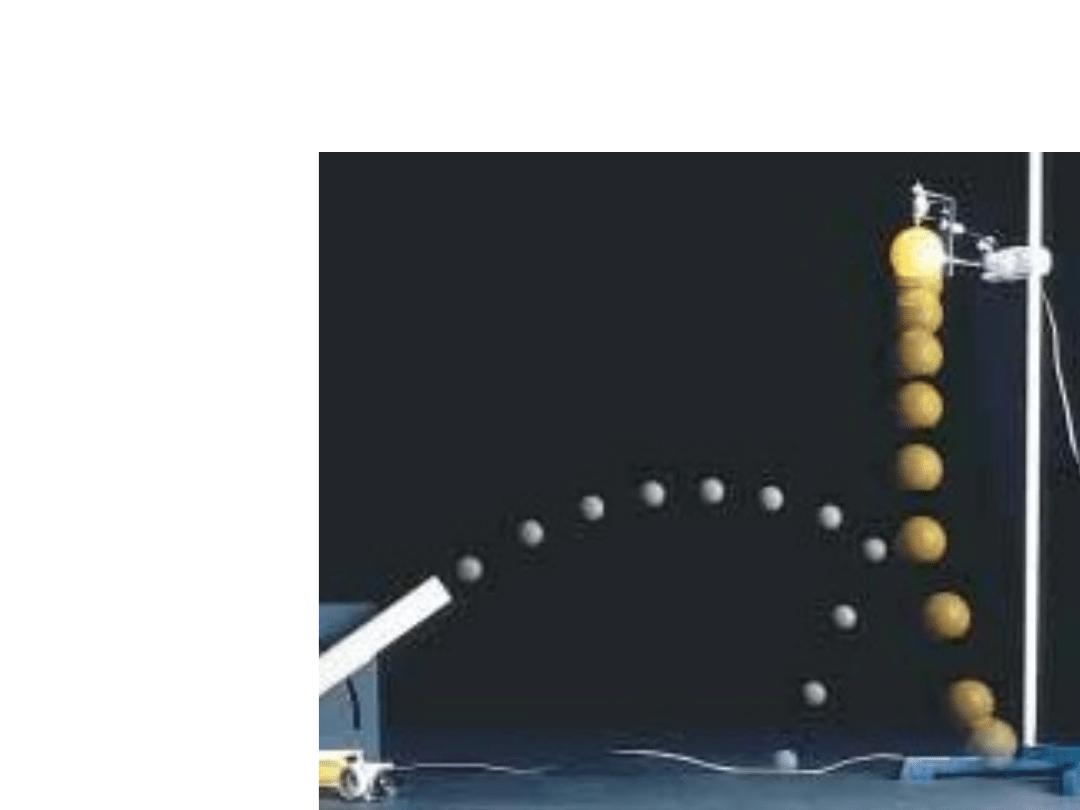
Rzut
ukośny
Jest to przypadek, dla którego:
h = 0 lub h 0, 0 < < 90
0
, v
0
0.
y
x
v
0
Składowe prędkości
początkowej
wynoszą:
sinθ
v
v
cosθ
v
v
0
0y
0
0x
Wysokość rz.:
g
y
2
sin
v
2
2
0
max
Zasięg rz.:
g
x
2
sin
v
2
0
max
Tor ruchu
przedstawia
przesunięta parabola
Rzut ukośny
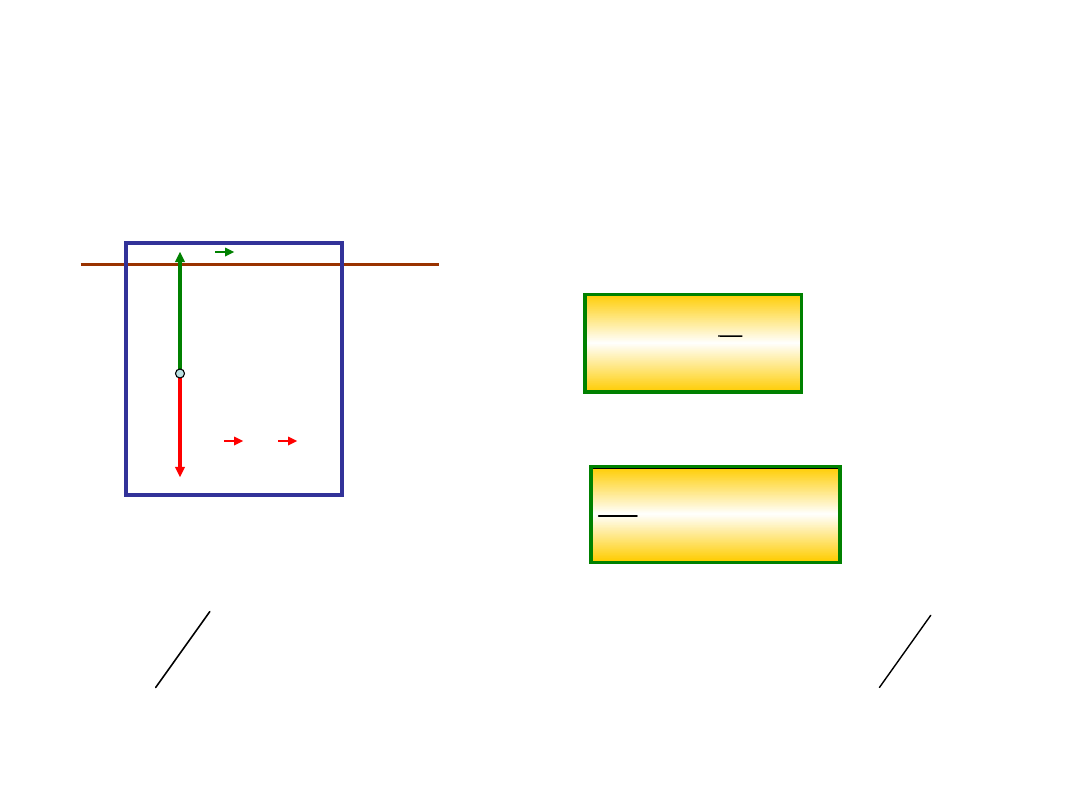
Należy jeszcze wspomnieć o szczególnym
przypadku rzutu ukośnego, a mianowicie
rzutu pod kątem = 90
0
z prędkością
początkową v
0
. Taki przypadek nazywamy
rzutem pionowym
.
v
0
v = g
t
Przebywana w czasie t
droga wynosi:
2
0
2
1
gt
t
v
s
Maksymalną wysokość
uzyskamy z warunku
0
v
0
gt
dt
ds
.
Czas ruchu ciała do maksymalnej wysokości h
wynosi więc:
, a uzyskana maksymalna wysokość
.
g
t
0
v
g
h
2
v
2
0
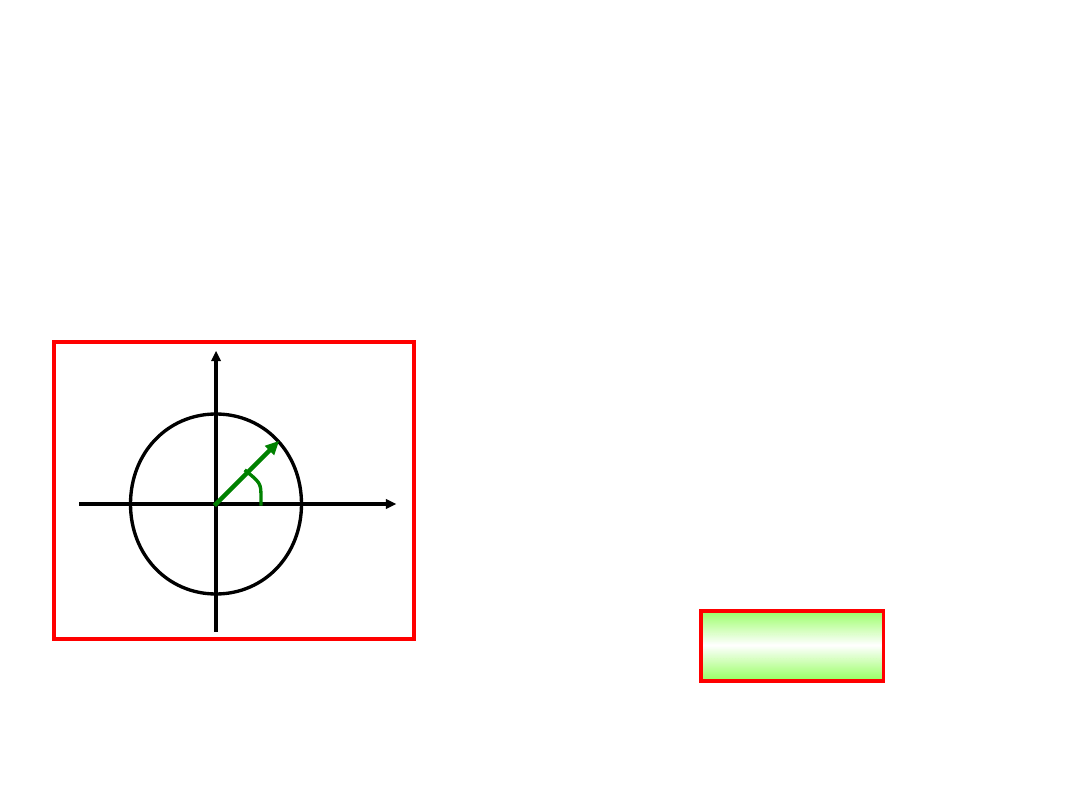
Ruch jednostajny po
okręgu
Początek układu współrzędnych wybieramy w środku
koła, po którym odbywa się ruch. Położenie punktu
na na kole możemy podać jednoznacznie przez
podanie kąta biegunowego i odległości r od
początku układu.
y
x
r
s
Ruch ciała określony jest
przez funkcję
= (t),
definiująca tzw. drogę
kątową.
Jeśli przez s oznaczymy
drogę, którą ciało przebyło
po okręgu w czasie gdy
przebyło ono drogę kątową
, to
r
s
Różniczkując to równanie obustronnie,
otrzymujemy;
.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
Wyszukiwarka
Podobne podstrony:
1 Kinematykaid 9342 ppt
6 kINEMATYKA UT K ppt
08 Kinematyka manipulatorów i robotów, przykładid 7261 ppt
03 Sejsmika04 plytkieid 4624 ppt
Choroby układu nerwowego ppt
10 Metody otrzymywania zwierzat transgenicznychid 10950 ppt
10 dźwigniaid 10541 ppt
03 Odświeżanie pamięci DRAMid 4244 ppt
Prelekcja2 ppt
więcej podobnych podstron