Podstawy
Metrologii
Wykład 3
Teoria błędów
Program na dziś
Definicja i rodzaje błędów;
Charakterystyka
metrologiczna;
Funkcja błędu.
Niepewność pomiarowa
Rodzaje niepewności Typ A i B
Rozkład Gaussa
Wykresy danych pomiarowych
Wprowadzenie
Przy omawianiu błędów wygodnie jest
przypomnieć na wzór terminologii
stosowanej w literaturze zachodniej
rozróżnienie pomiędzy pojęciami
dokładność
i
precyzja
.
Wynik pomiaru określamy wówczas jako
dokładny
, gdy jest on wolny od błędów
systematycznych, natomiast jako
precyzyjny
, gdy jego błąd przypadkowy
jest bardzo mały.
Wprowadzenie
Każdy eksperyment, każdy pomiar i
prawie każda operacja składowa
pomiaru daje wyniki obarczone
różnymi typami błędów
Wprowadzenie
Teoria błędów
- dział matematyki stosowanej
zajmujący się metodami oceny dokładności
pomiarów lub rachunków przybliżonych.
Teoria błędów umożliwia m.in. określenie
dopuszczalnych wartości błędów
popełnianych przy pomiarach lub rachunkach,
tak aby wynik całości obliczeń (czy też
pomiarów) zapewniał wymaganą dokładność
(tzw. dyskusja błędu).
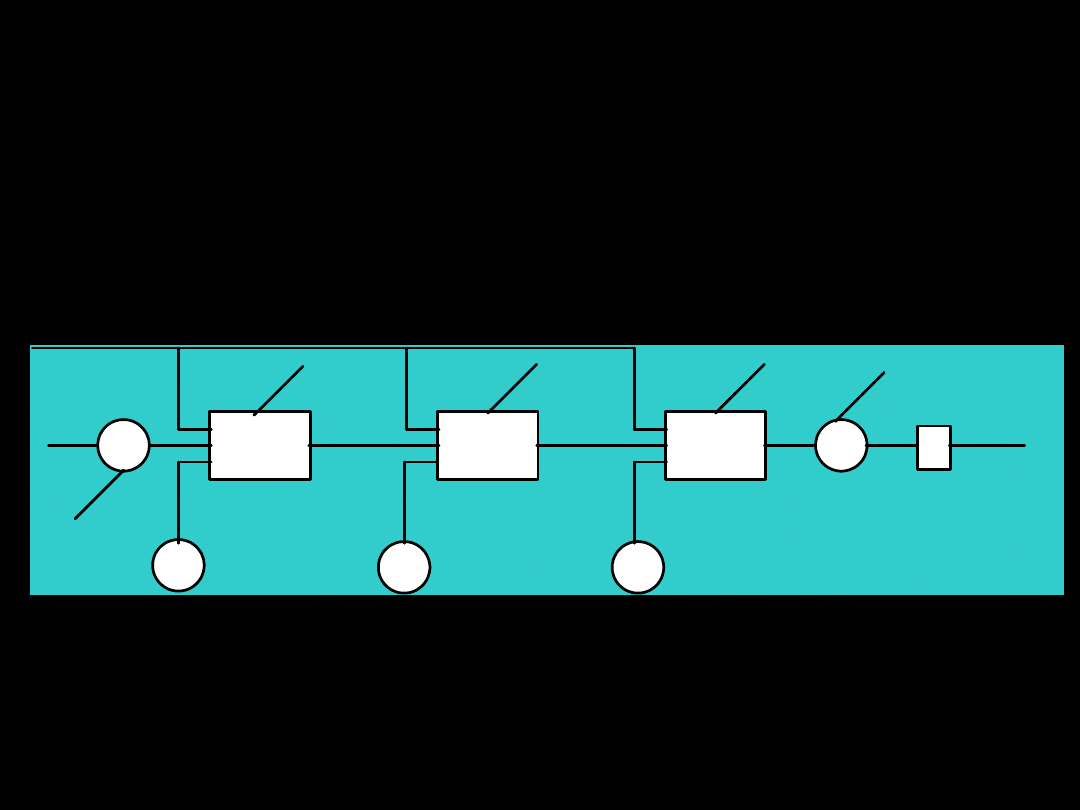
Wprowadzenie
a
a
a
F1
F2
F3
x
i
z
z
z
z
z
x
x"
Pomiar
Pomiar
— pewna sekwencja czynności
doświadczalnych i obliczeniowych,
prowadząca do wyznaczenia liczbowej
wartości wielkości fizycznej.
Ta wybrana sekwencja powinna
minimalizować wpływ oddziaływań
zewnętrznych na badane zjawisko i
przyrządy.
Wynik pomiaru
wartość pomiaru
±
błąd
pomiarowy
Błąd pomiaru
Błąd pomiarowy niepewność pomiarowa,
dokładność pomiaru
Błąd w pomiarach = pomyłka
.
Definicja błędu
Jeżeli wartość wielkości wynosi
x
, a
przyjęto wartość
x`
, to różnica
Δx = x`-x
jest błędem - jest to najlepsza definicja w
przypadku eksperymentów myślowych;
Definicja błędu
Błąd jest to różnica między
wartością wielkości a wartością
poprawną tej samej wielkości
– definicja ta wyraża błąd w dziedzinie
abstrakcji
Definicja błędu
Błąd jest to różnica między
stanem danej wielkości a stanem
rzeczywistym jej wielkości
- definicja ta wyraża błąd w dziedzinie
rzeczywistości powstający przy tworzeniu
obrazu rzeczywistości za pomocą pomiarów.
Rodzaje błędów
Rozróżnia się trzy rodzaje miar
błędu:
błędy prawdziwe,
błędy umownie prawdziwe
błędy graniczne
Podział błędów
Wyniki pomiarów podlegają pewnym
prawidłowościom, tzw. rozkładom typowym dla
zmiennej losowej. Z tego względu błędy
dzielimy na:
•
Błędy grube
(pomyłki), które należy
eliminować
•
Błędy systematyczne
, które można
ograniczyć udoskonaląjąc pomiar
•
Błędy przypadkowe
, które podlegają prawom
statystyki i rachunku prawdopodobieństwa,
wynikają z wielu losowych przyczynków i nie
dają się wyeliminować
Krzywe rozkładu
błędu
Błąd systematyczny Błąd przypadkowy
Błędy grube
Są wynikiem pomyłki eksperymentatora
np. przy
odczytywaniu wartości mierzonych, przy
przeliczaniu jednostek etc., nieprawidłowego
stosowania przyrządu pomiarowego, poważnego
i nieuświadomionego uszkodzenia przyrządu
pomiarowego, zastosowania nieodpowiedniej
metody pomiaru lub niewłaściwych wzorów
teoretycznych do opracowania wyników.
Fakt zaistnienia błędu grubego należy sobie jak
najszybciej uświadomić a wynik obarczony takim
błędem wykluczyć z dalszych analiz.
Jeśli to możliwe, pomiar powtórzyć.
Rodzaje błędów
Wartość oczekiwana błędu
przypadkowego jest równa
zeru
,
- właściwość ta nie zawsze jest zgodna z
sensem fizycznym błędów przypadkowych.
Rodzaje błędów
Błąd może być przedstawiany w
trzech postaciach:
błędu bezwzględnego,
błędu względnego,
błędu unormowanego
(czyli
zakresowego lub sprawdzonego)
Rodzaje błędów
Podział błędów ze względu na warunki
pomiaru:
w warunkach odniesienia popełniany
błąd nazywa się
błędem podstawowym
,
w innych warunkach występują ponadto
błędy dodatkowe
.
Rodzaje błędów
Podział błędów ze względu na
charakter mierzonej
wielkości:
-
błędy statyczne
- błędy dynamiczne
Błąd dynamiczny można zdefiniować dwojako:
a)
jest to błąd spowodowany odmiennymi niż idealne
właściwościami dynamicznymi układu pomiarowego;
b) jest to błąd spowodowany zastosowaniem statycznej
procedury wzorcowania dla układu przy pomocy
którego dokonujemy pomiarów dynamicznych
mierzonej wielkości.
Rodzaje błędów
Podział błędów ze względu na fizyczne
przyczyny powstawania błędu - wyróżnia
się tu m.in.:
błąd wzorcowania,
błąd niestałości,
błędy kwantowania,
błędy próbkowania,
błędy zliczania,
itd.
Rodzaje błędów
Podział błędów ze względu na charakter błędu -
wyróżnia się tu:
błąd systematyczny
błąd przypadkowy (błąd losowy)
- Błąd systematyczny jest to błąd, który przy
wielokrotnym wykonywaniu pomiaru tej samej
wielkości w tych samych warunkach ma wartość
stałą lub zmienia się według znanego prawa.
- Wszystkie pozostałe błędy określa się jako
przypadkowe.
Błąd
systematyczny
Błąd pomiarowy systematyczny
jest to
stała, nieznana, wartość zmiany wyniku
pomiaru, wynikająca z ograniczoności
modelu fizycznego zjawiska, którym się (w
danej chwili) posługujemy, ograniczoności
metody pomiaru, czy też niewłaściwej
kalibracji przyrządu pomiarowego; błąd ten
ujawnia się zwykle dopiero po zmianie
metody pomiaru lub modelu fizycznego
zjawiska.
Błąd systematyczny
o znanej wartości
nazywamy
poprawką.
Błędy
systematyczne
Błędy systematyczne
zawsze w ten sam
sposób wpływają na wyniki pomiarów
wykonanych za pomocą tej samej metody i
aparatury pomiarowej.
Minimalna wartość błędu
systematycznego
jest określona
dokładnością stosowanego przyrządu (lub
klasą w przypadku analogowych mierników
elektrycznych).
Źródłem błędu systematycznego
są:
-
skale mierników
(np. niewłaściwe ustawienie
„zera”),
- nieuświadomiony
wpływ czynników
zewnętrznych
(temperatura, wilgotność) na
wartość wielkości mierzonej,
- niewłaściwy
sposób odczytu
(błąd paralaksy)
lub pomiaru,
- przybliżony
charakter wzorów
stosowanych do
wyznaczenia wielkości złożonej.
Błąd
przypadkowy
Błąd pomiarowy przypadkowy
(statystyczny)
jest to średnia wartość
zmiennych zaburzeń mierzonej wielkości
fizycznej, pochodzących od wielu słabych
oddziaływań zewnętrznych, lub skutek tzw.
nieokreśloności obiektu.
Błąd ten jest najczęściej nieznany, a wyznacza
się go w pomiarach (razem z wartością
pomiaru, jako tzw. błąd pojedynczego pomiaru).
Błędy
przypadkowe
Błędy przypadkowe
zawsze występują w
eksperymencie powodują rozrzut kolejnych
odczytów wokół rzeczywiste wartości mierzonej
wielkości (oczywiście, gdy występuje błąd
systematyczny, pomiary układają się wokół
pewnej, przesuniętej względem rzeczywistej,
wartości).
Błędy przypadkowe
można wykryć drogą
powtarzania pomiarów, przy okazji poprawiając
precyzję pomiarów, korzystając ze średniej
wartości serii pomiarów.
Błędy
przypadkowe
Błędy przypadkowe zawsze towarzyszą
eksperymentowi, nawet jeśli inne błędy
zostaną wyeliminowane.
W przeciwieństwie do błędu systematycznego,
ich wpływ na wynik ostateczny pomiaru nie
można ściśle określić.
Błędy
przypadkowe
Występują zawsze
w pomiarach, lecz
ujawniają się,
gdy wielokrotnie dokonujemy pomiaru przyrządem
,
którego dokładność jest bardzo duża a błędy
systematyczne wynikające z innych przyczyn są
bardzo małe.
Wynikają one z własności obiektu mierzonego
(np.
wahania średnicy drutu na całej jego długości),
własności przyrządu pomiarowego (np. wskazania
przyrządu zależą od przypadkowych drgań budynku,
fluktuacji ciśnienia czy temperatury, docisku dla
suwmiarki), lub mają podłoże fizjologiczne (refleks
eksperymentatora, subiektywność oceny maksimum
natężenia dźwięku czy równomierności oświetlenia
poszczególnych części pola widzenia)
Błąd
przypadkowy
Błąd przypadkowy
manifestuje się rozrzutem
wartości pomiaru przy jego powtarzaniu ( pomiar
wielokrotny).
Małe a liczne zaburzenia pomiaru: efekty mechaniczne
(zmienne tarcie, kurczliwość, wstrząsy), wahania
napięcia zasilania przyrządów, prądy powietrza,
zmienne pola elektromagnetyczne, itp.
•
Błędy przypadkowe metody
(np. błąd
paralaksy)
•
Błędy przypadkowe przyrządu
Błąd (dokładność) przyrządu
jest w błędem
przypadkowym pod warunkiem, że przyrząd jest
dobrze wykalibrowany, w przeciwnym razie, do błędu
przypadkowego dochodzi jeszcze błąd systematyczny.
•
Błąd przypadkowy obiektu
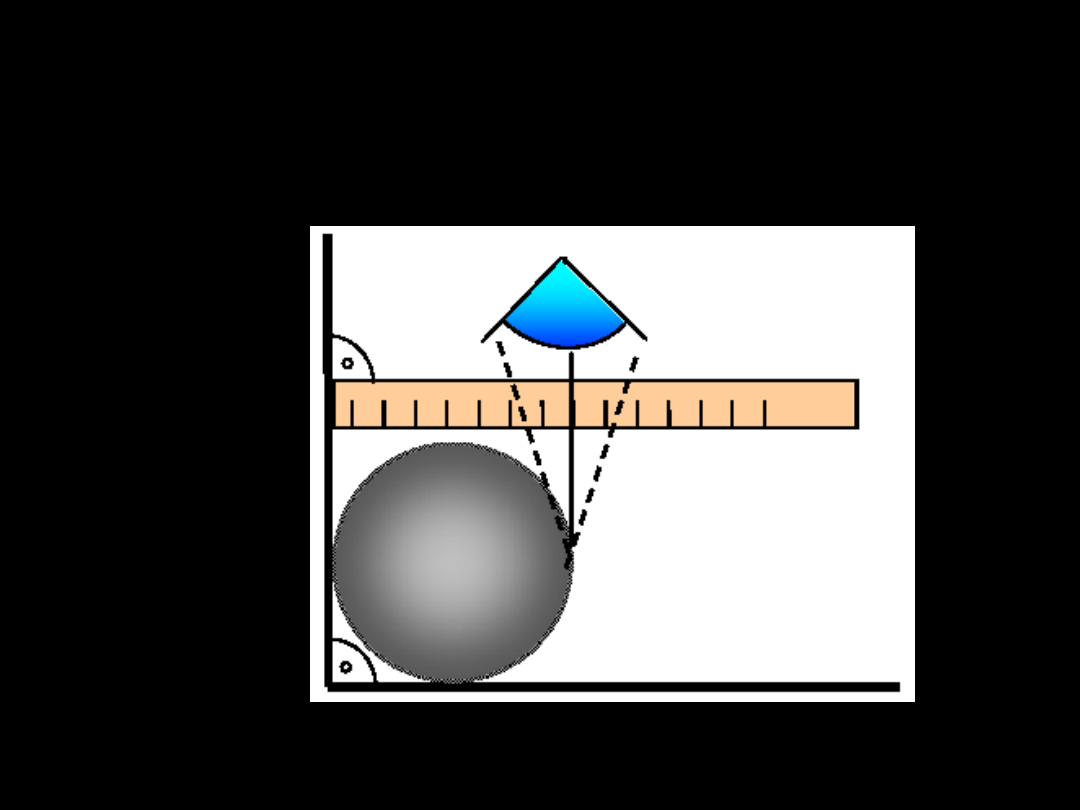
Błąd - paralaksa
Błąd przypadkowy metody
pomiarowej
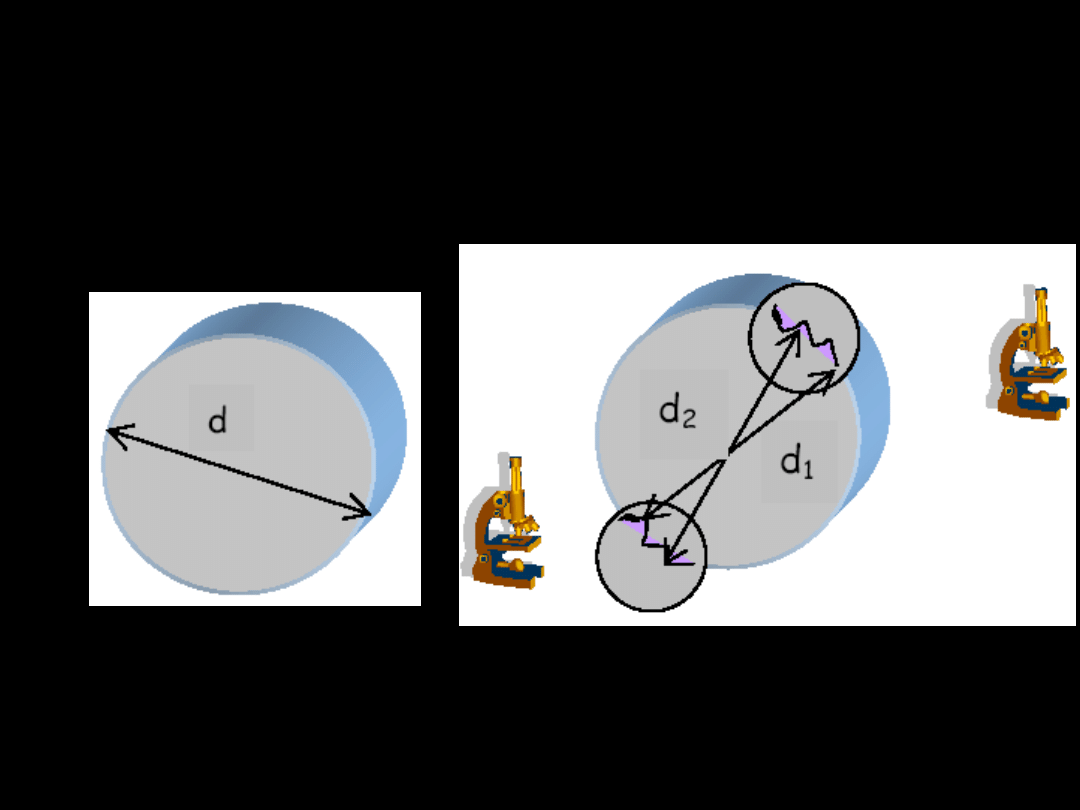
pomiar suwmiarką
pomiar dokładniejszy
Δd = 0.05 mm = 50 µm Δ d
=0.001mm = 1 µm
Pomiar wielokrotny:
20.15, 20.15, 20.15, 20.15 mm ... 20.12, 20.19, 20.11, 20.21, 20.09
mm, ...
Obliczenia błędu
przypadkowego
x
– wielkość fizyczna mierzona,
x
i
– wartości zmierzone, gdzie:
i = 1, ...n
,
n
– liczba pomiarów.
Szukamy tzw.
„wartości prawdziwej”
µ
wielkości fizycznej
x
, dysponując
n
liczbami
– wynikami
pomiarów.
Poszukujemy również wartości błędu
pomiarowego pojedynczego pomiaru
σ
,
charakteryzującej warunki pomiaru (liczba,
„ukryta”
w rozrzucie wartości
x
i
).
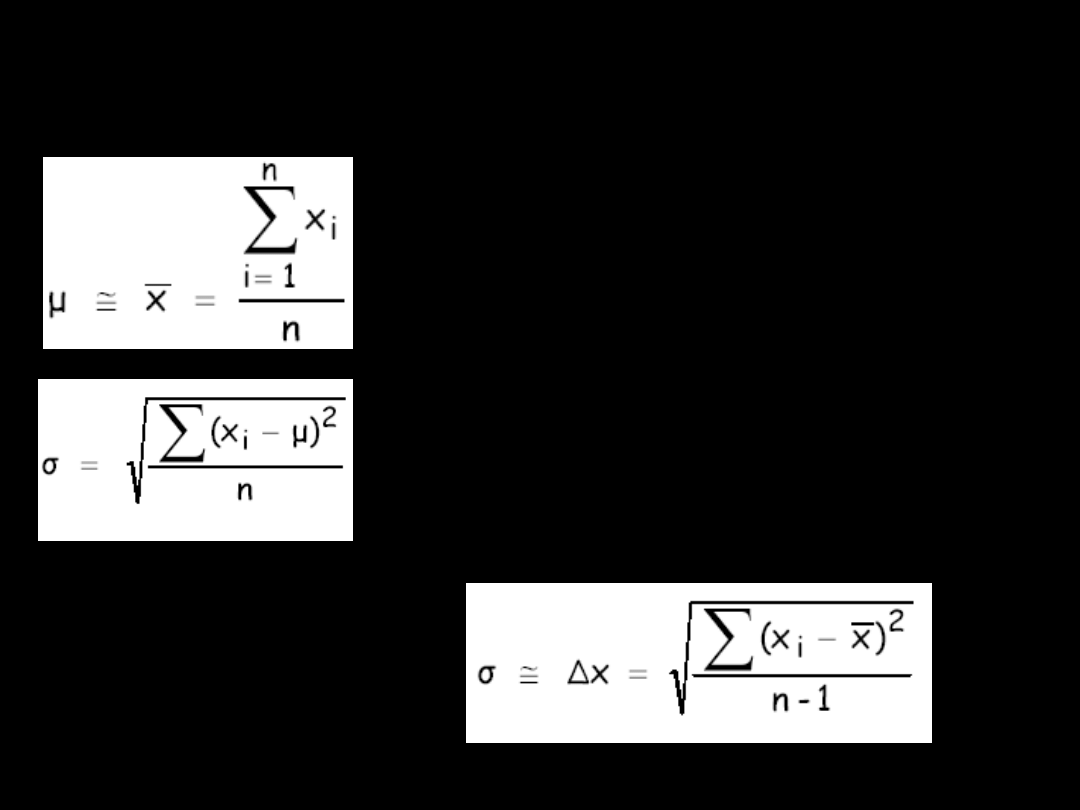
średnia wyników pomiaru („wynik
pomiaru”),
błąd (średni kwadratowy)
pojedynczego pomiaru
-
odchylenie standardowe
lub
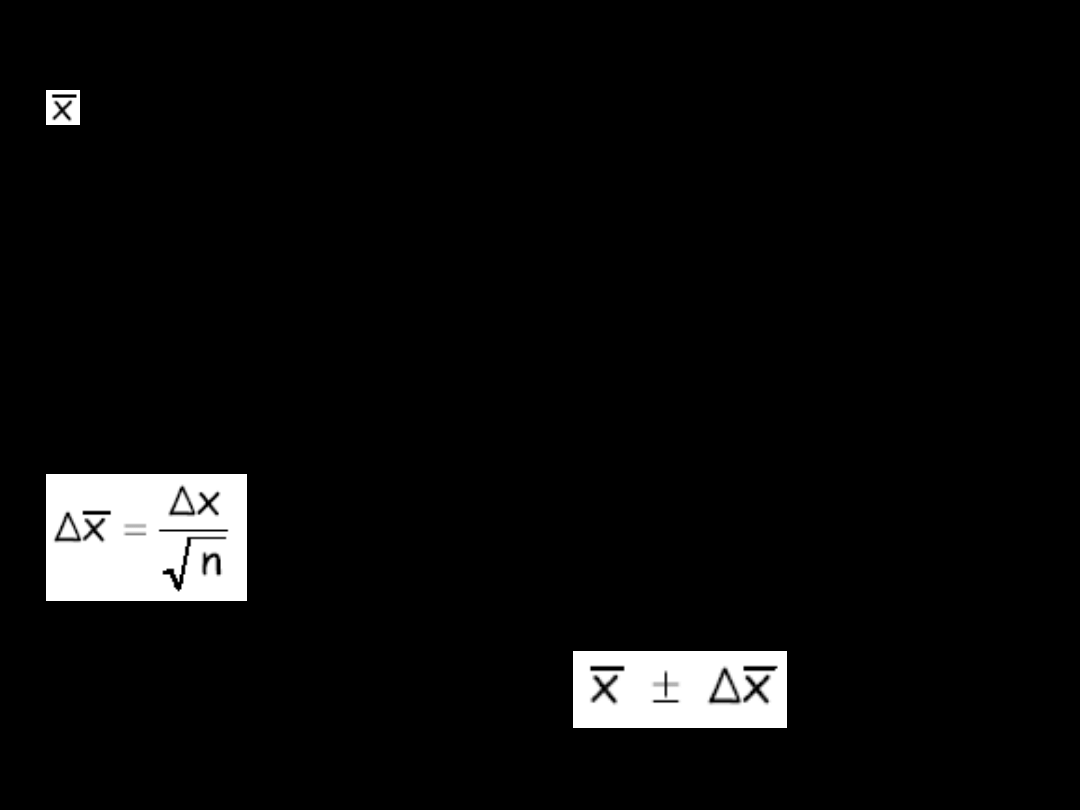
przyjmowane jest za „wartość pomiaru” Δx
nie jest „błędem pomiarowym” („błędem
wartości pomiaru”); jest to
błąd pojedynczego
pomiaru
, charakteryzujący takie same warunki
pomiaru.
Błąd wartości pomiaru będzie zależny
również od krotności pomiarów
n
:
-
błąd wartości średniej („błąd
pomiarowy”).
Ostatecznie:
Charakterystyka
metrologiczna
Pod pojęciem charakterystyka
metrologiczna rozumie się ogół
wiadomości o błędach układu
pomiarowego przedstawionych w
pewien uporządkowany sposób.
Różnorodność przyrządów i
rozmaitość ich zastosowań
powodują, że nie istnieje jednolity
sposób opracowywania
charakterystyk metrologicznych.
Istnieją pewne zalecenia normatywne,
producenci aparatury korzystają z
różnych wariantów charakterystyk,
upraszczając je w dość dowolny
sposób.
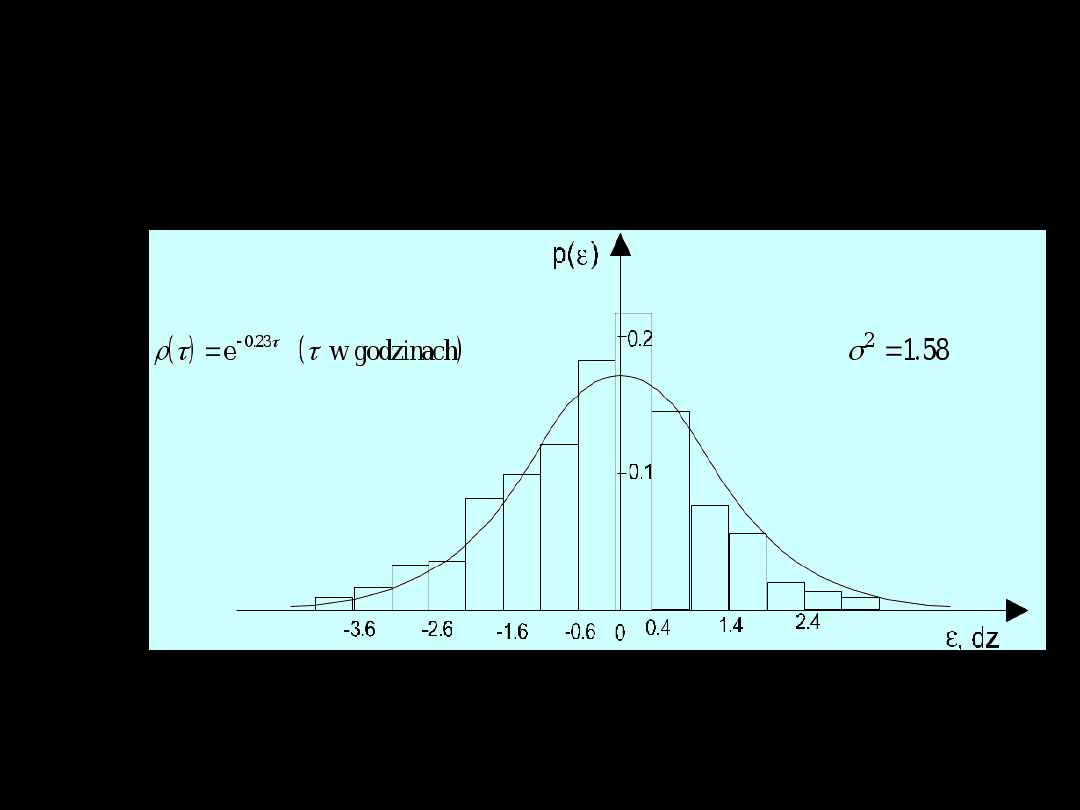
Charakterystyka
metrologiczna
Rozkład prawdopodobieństwa błędu
niestałości
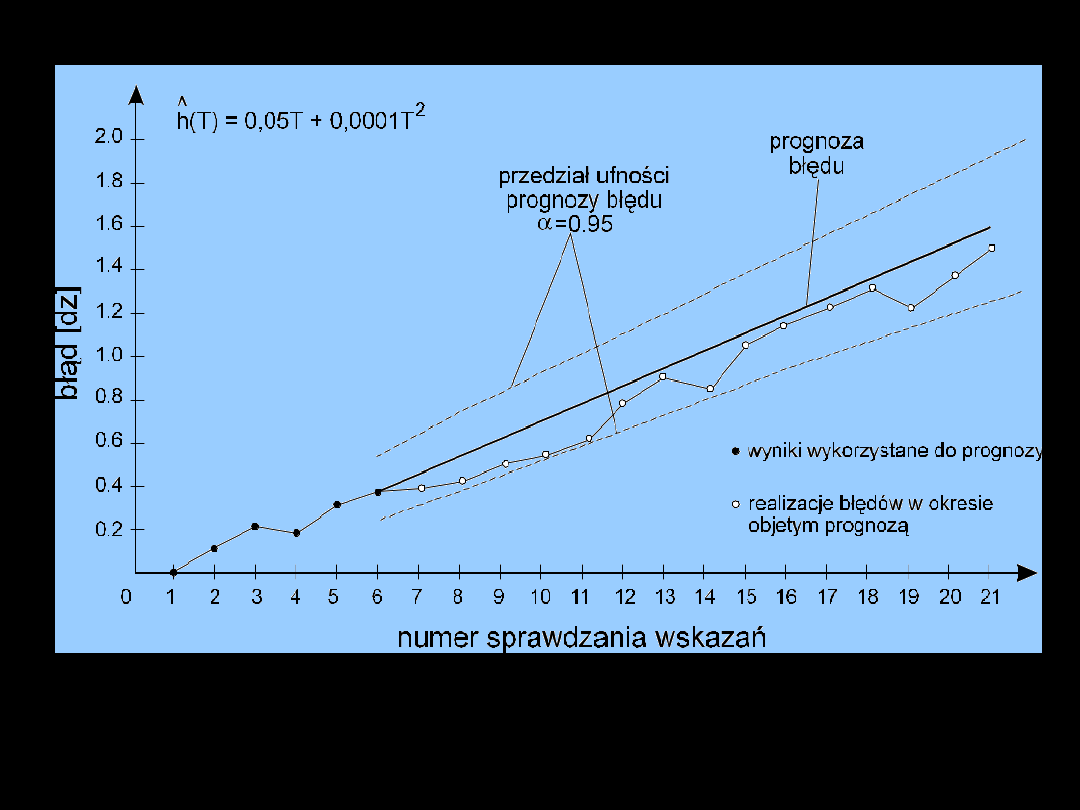
Przebieg błędu niestałości i jego
prognoza
Klasa
niedokładności
Klasa niedokładności przyrządu
(systemu
pomiarowego) określa nam zakres, którego nie
może przekroczyć błąd podstawowy w całym
zakresie pomiarowym.
Sprawdzanie wskazań przeprowadza się w
warunkach odniesienia w punktach skali
przyrządu opisanych cyframi. Punkty te oznacza
się
x
j
, j = 1, ..., k
. Wynikiem sprawdzania jest
zbiór błędów
{D
j
}.
Układ pomiarowy spełnia
wymagania klasy niedokładności, gdy
|D
j
| D
dop
dla
j = 1, ..., k
.
Adiustacją
nazywa się wykonanie ściśle
określonych stosowną instrukcją
czynności regulacji (kalibrowania) układu
pomiarowego, przy wykorzystaniu
wzorca jako niezbędnego elementu
pomocniczego, sprowadzające błąd do
zadanej wartości (najczęściej do zera).
Oczywiście, gdy np. przyrząd nie ma
możliwości regulacji zamiast adiustacji
można przeprowadzić zwykłe
wzorcowanie.
Wzorcowanie
, jest to zbiór operacji
ustalających relację między
wartościami wielkości mierzonej
wskazanymi przez przyrząd
pomiarowy a odpowiednimi
wartościami wielkości, realizowanymi
przez wzorce jednostki miary.
- legalizacja
jest sprawdzeniem,
stwierdzeniem i poświadczeniem przez organ
administracji miar (wyłącznie), że przyrząd
pomiarowy spełnia wymagania przepisów
metrologicznych,
- uwierzytelnienie
jest to sprawdzenie,
stwierdzenie i poświadczenie, że przyrząd
pomiarowy spełnia wymagania metrologiczne
i ustalone w przepisach, normach i
zaleceniach międzynarodowych lub innych
właściwych dokumentach, a jego wskazania
zostały odniesione do państwowych wzorców
jednostek miar i są z nimi zgodne w
granicach określonych błędów pomiarów.
- Legalizacja i uwierzytelnienie,
ma na
celu sporządzenie oficjalnego dowodu
potwierdzającego możliwość stosowania
danego przyrządu pomiarowego. Jeżeli
wymaga tego przepis nadrzędny lub
kontrakt z klientem (umowa, zamówienie,
zlecenie), wówczas legalizacji/
uwierzytelnienia dokonać musi uprawniona
jednostka i ta jednostka "wystawia"
stosowny
dokument: legalizujący
(np. pod
rygorem spełnienia ściśle określonych
warunków eksploatacyjnych) użytkowanie
przyrządu, oraz
zapewniający
wiarygodność
wyników pomiaru (i
oczywiście monitorowania).
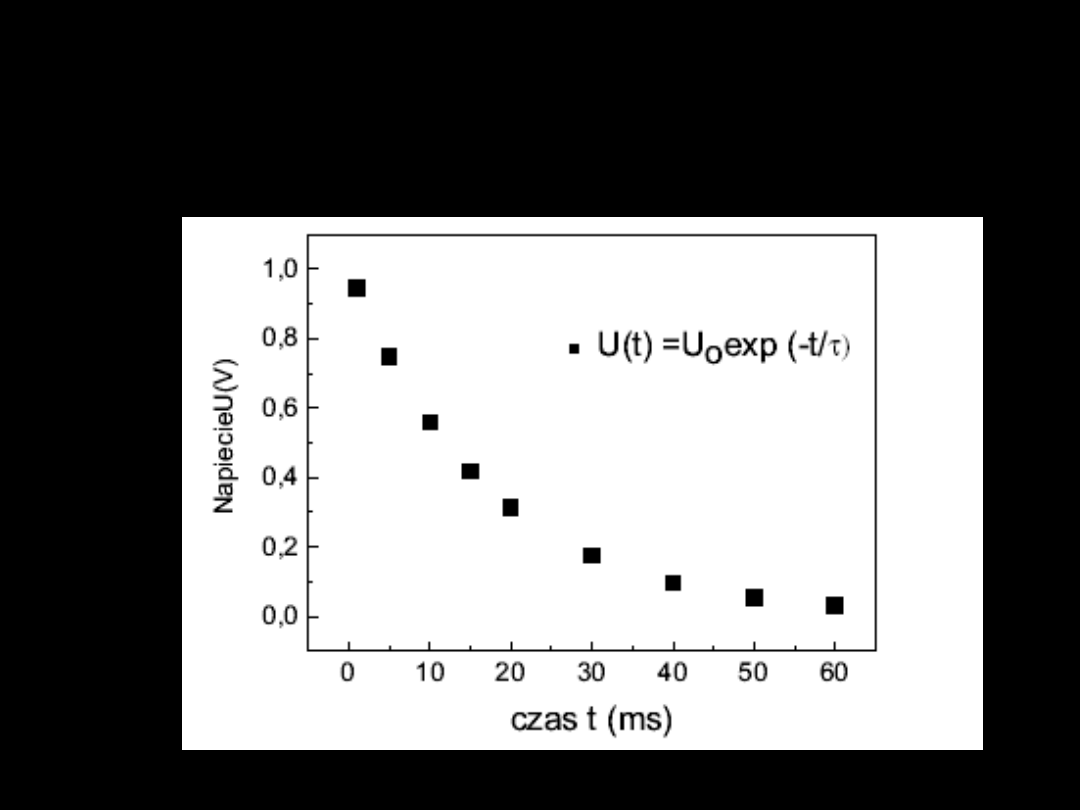
Funkcja błędu
Jeżeli pomiary pewnej wielkości x narażone są na
wpływ wielu niewielkich i przypadkowych zaburzeń, to
rozkład wyników jest rozkładem normalnym.
Całka funkcji gęstości prawdopodobieństwa opisującej
rozkład normalny, oznaczana czasem jako erf(t) i
obliczana zgodnie ze wzorem:
nosi nazwę
funkcji błędu
lub
normalnej całki błędu
i
określa prawdopodobieństwo tego, że wartość
pomiaru znajdzie się w promieniu t odchyleń
standardowych od wartości prawdziwej X.
t
X
t
X
X
x
x
f
t
d
)
(
)
erf(
,
Niepewność
pomiaru
Podstawowe terminy i
definicje
•
wartość oczekiwana
– wartość
zgodna ze zdefiniowana, jest nazywana
często wartością rzeczywista; jest to
wartość, która może być uzyskana w
wyniku doskonałego pomiaru;
•
wartość oznaczana
– wartość
uzyskana w wyniku zastosowania danej
procedury analitycznej; wynik pomiaru
to najczęściej średnia arytmetyczna z
uzyskanych wartości oznaczanych;
•
dokładność pomiaru
– stopień zgodności
pomiędzy wynikiem pojedynczego
pomiaru a wartością rzeczywista;
•
poprawność pomiaru
– stopień
zgodności pomiędzy wynikiem analizy
(średnią) a wartością rzeczywistą;
•
precyzja pomiaru
– zgodność pomiędzy
uzyskiwanymi niezależnymi pomiarami;
niepewność pomiaru
(uncertainty) –
parametr związany z wynikiem pomiaru,
który określa przedział wokół wartości
średniej, w którym może (na założonym
poziomie istotności) znaleźć się wartość
oczekiwana;
standardowa niepewność pomiaru
(standard uncertainty) –
u(xi)
-
niepewność pomiaru przedstawiona i
obliczona jako odchylenie standardowe;
złożona standardowa niepewność
(combined standard uncertainty) –
uc(y)
–
standardowa niepewność wyniku
y
pomiaru,
której wartość jest obliczona na podstawie
niepewności parametrów wpływąjących na
wartość wyniku analizy z zastosowaniem prawa
propagacji niepewności;
rozszerzona niepewność
(expanded
uncertainty) -
U
– wielkość określająca przedział
wokół uzyskanego wyniku analizy, w którym
można, na odpowiednim, przyjętym poziomie
istotności (prawdopodobieństwa) oczekiwać
wystąpienia wartości rzeczywistej;
•
współczynnik rozszerzenia
(coverage
factor) –
k
– wartość liczbowa użyta do
wymnożenia złożonej standardowej
niepewności pomiaru w celu uzyskania
rozszerzonej niepewności, wartość
współczynnika zależy od przyjętego
poziomu prawdopodobieństwa (np.: dla 95
% wynosi 2) i najczęściej jest wybierana z
przedziału liczb 2-3;
Niepewność
W praktyce nie znamy wartości rzeczywistych
wielkości mierzonych i szacujemy
niepewności pomiarowe wynikające ze
statystycznych praw rozrzutu pomiarów
.
Niepewność pomiaru jest związanym
rezultatem pomiaru parametrem,
charakteryzującym rozrzut wyników, który
można w uzasadniony sposób przypisać
wartości mierzonej.
Niepewność u
lub
u(x)
(ang.
uncertainty) posiada wymiar, taki sam
jak wielkość mierzona
Niepewność względna ur(x)
to
stosunek niepewności (bezwzględnej) do
wielkości mierzonej:
Niepewność względna
jest wielkością
bezwymiarową i może być wyrażona w %
Niepewność
Istnieją dwie miary niepewności
pomiaru:
niepewność standardowa
u(x)
niepewność maksymalna
Δx
Niepewność
standardowa
1. Rezultat pomiaru jest zmienną losową
x
i
, której rozrzut wokół wartości średniej
x
charakteryzuje parametr zwany
odchyleniem standardowym
2. Dokładnej wartości odchylenia
standardowego nie znamy. Niepewność
standardowa jest jego niezbyt dokładnym
oszacowaniem (estymatorem, oceną).
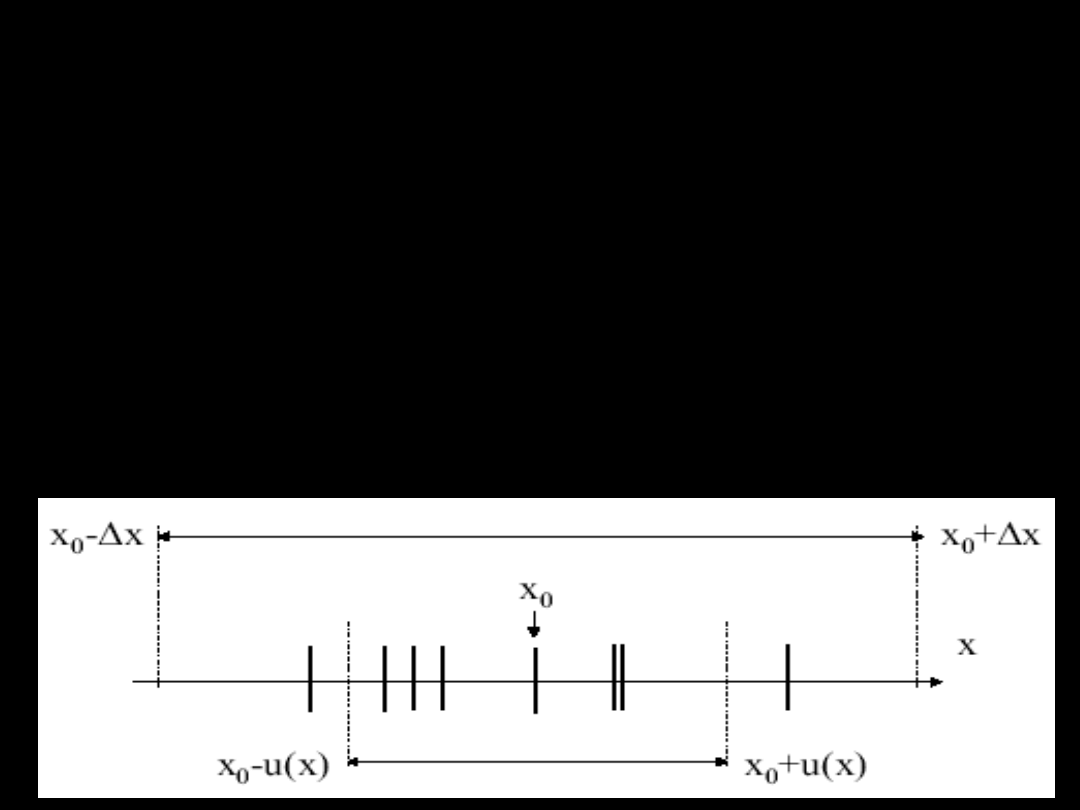
Niepewność
maksymalna
Jest miarą deterministyczną, gdyż zakłada, że można
określić przedział wielkości mierzonej x, w którym
na pewno znajdzie się wielkość rzeczywista.
W tym przypadku staramy się określić przedział,
x
o
- Δx < x
i
< x
o
+ Δx
w którym mieszczą się wszystkie wyniki pomiaru xi,
aktualnie wykonane i przyszłe.
Zaleca się obecnie niepewność maksymalną
specyfikowaną przez producenta zamieniać na
niepewność standardową wg wzoru:
Typy oceny
niepewności
Typ A
Metody wykorzystujące statystyczną analizę serii
pomiarów:
•wymaga odpowiednio dużej liczby powtórzeń pomiaru
• ma zastosowanie do błędów przypadkowych
Typ B
Opiera się na naukowym osądzie eksperymentatora
wykorzystującym wszystkie informacje o pomiarze i
źródłach jego niepewności
•
stosuje się gdy statystyczna analiza nie jest możliwa
•dla błędu systematycznego lub dla jednego wyniku
pomiaru
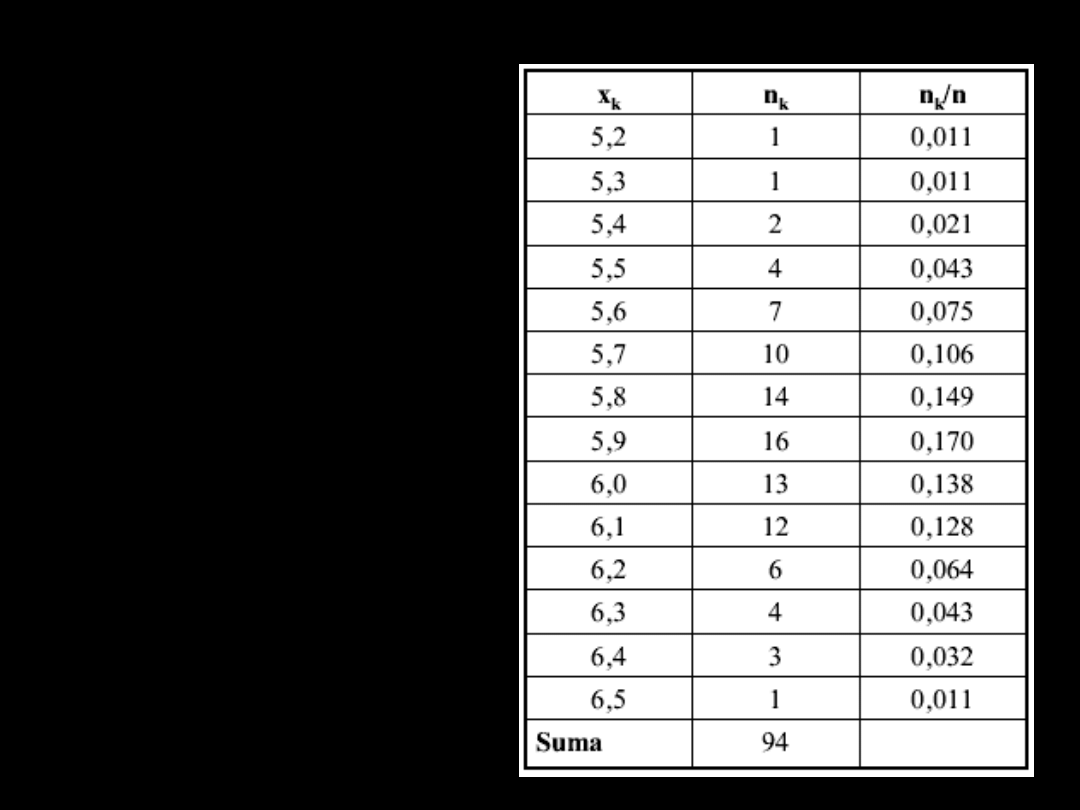
Typ A
Seria wyników (próba)
x
1
,x
2
, ….x
n
obarczonych
niepewnością
przypadkową jest duża
gdy 30<n<100. W
próbie takiej wyniki się
powtarzają:
n
k
jest
liczbą pomiarów, w
których wystąpił wynik
x
k
,
n
k
/n
jest częstością
występowania wyniku
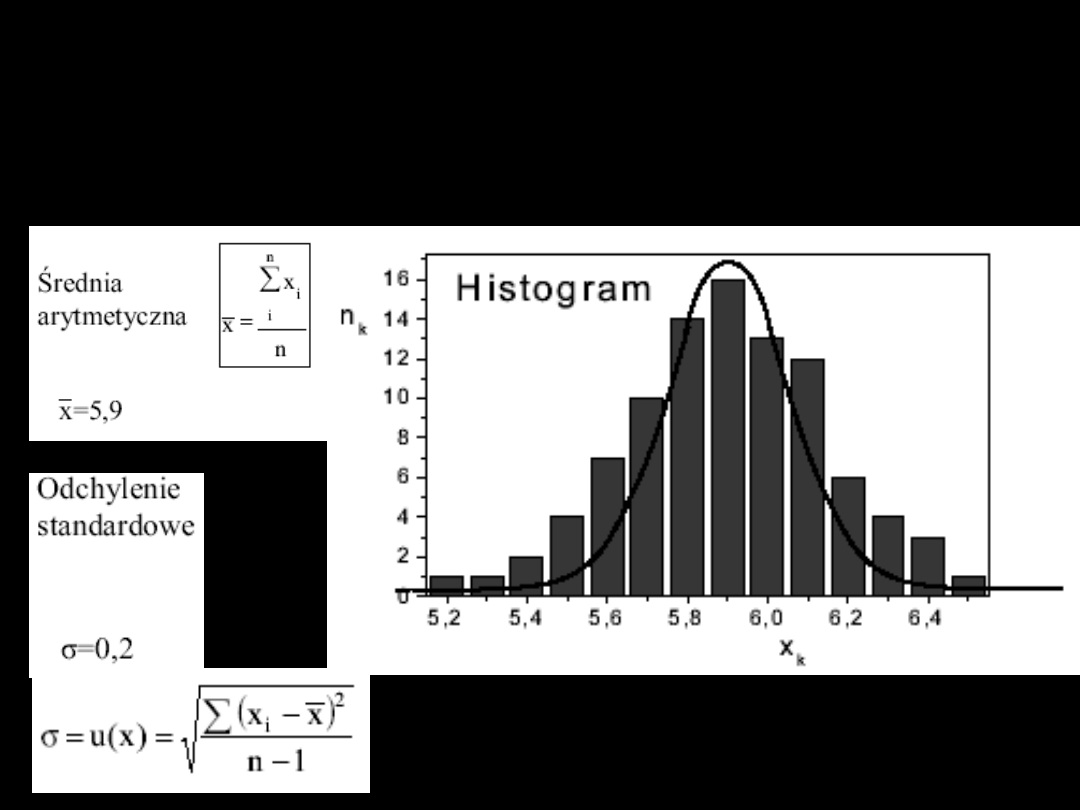
Opracowanie serii
pomiarów
bezpośrednich dużej
próby
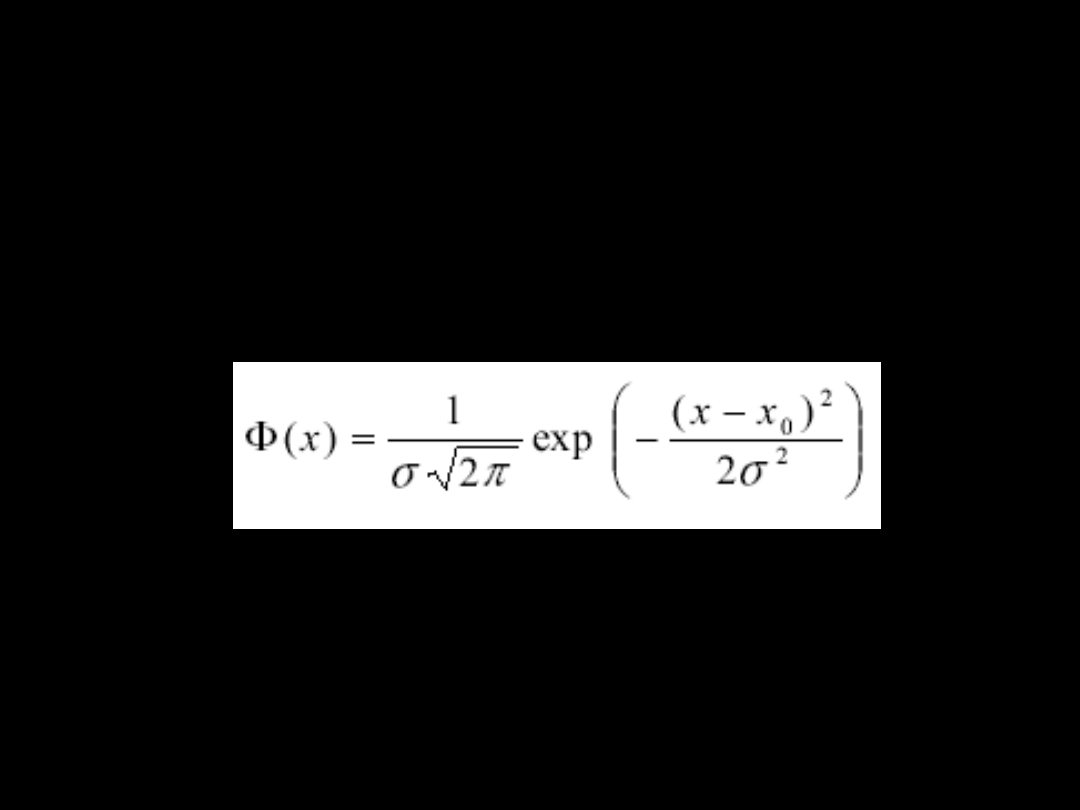
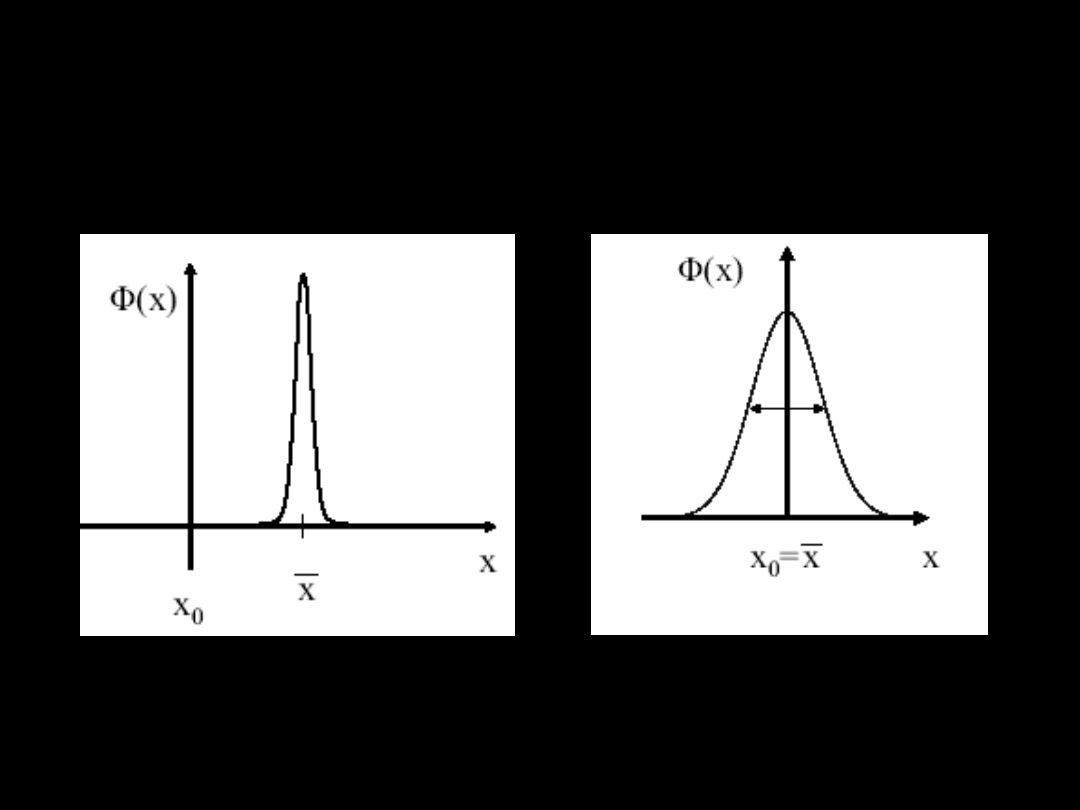
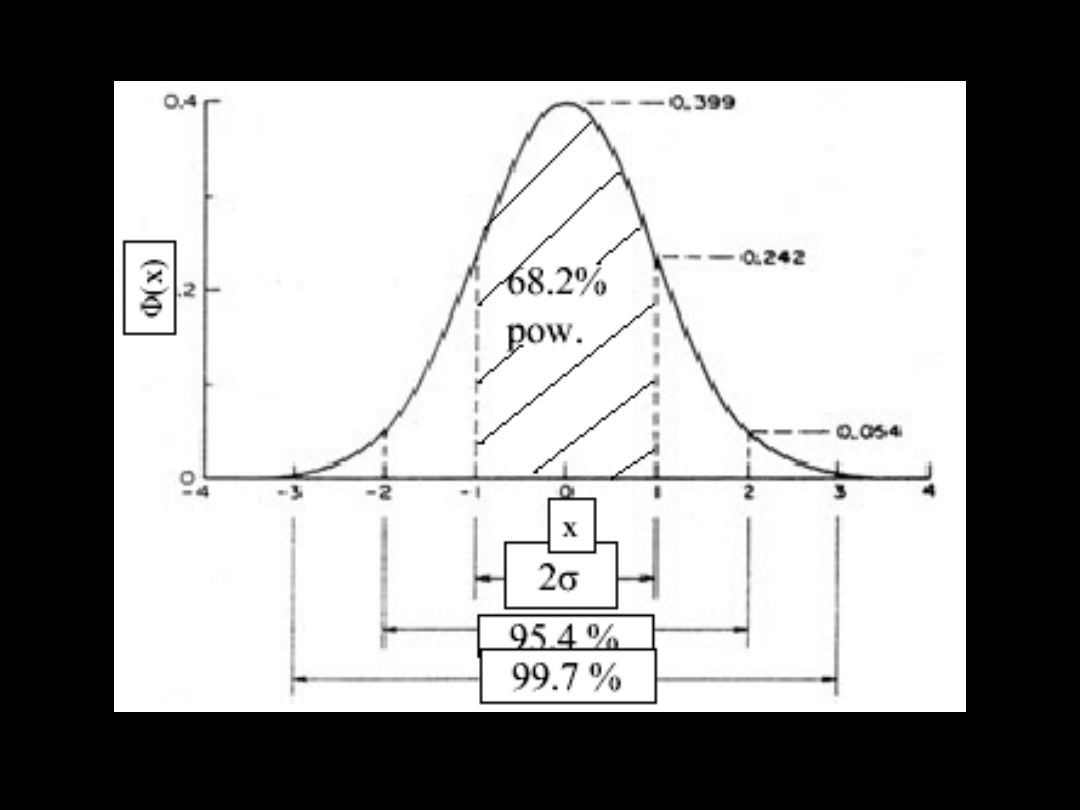
Rozkład normalny
Gaussa
Gęstość prawdopodobieństwa wystąpienia
wielkości x lub jej błędu Δx podlega rozkładowi
Gaussa
x
0
jest wartością najbardziej prawdopodobną i
może być nią średnia arytmetyczna, jest
odchyleniem standardowym, jest wariancją
rozkładu
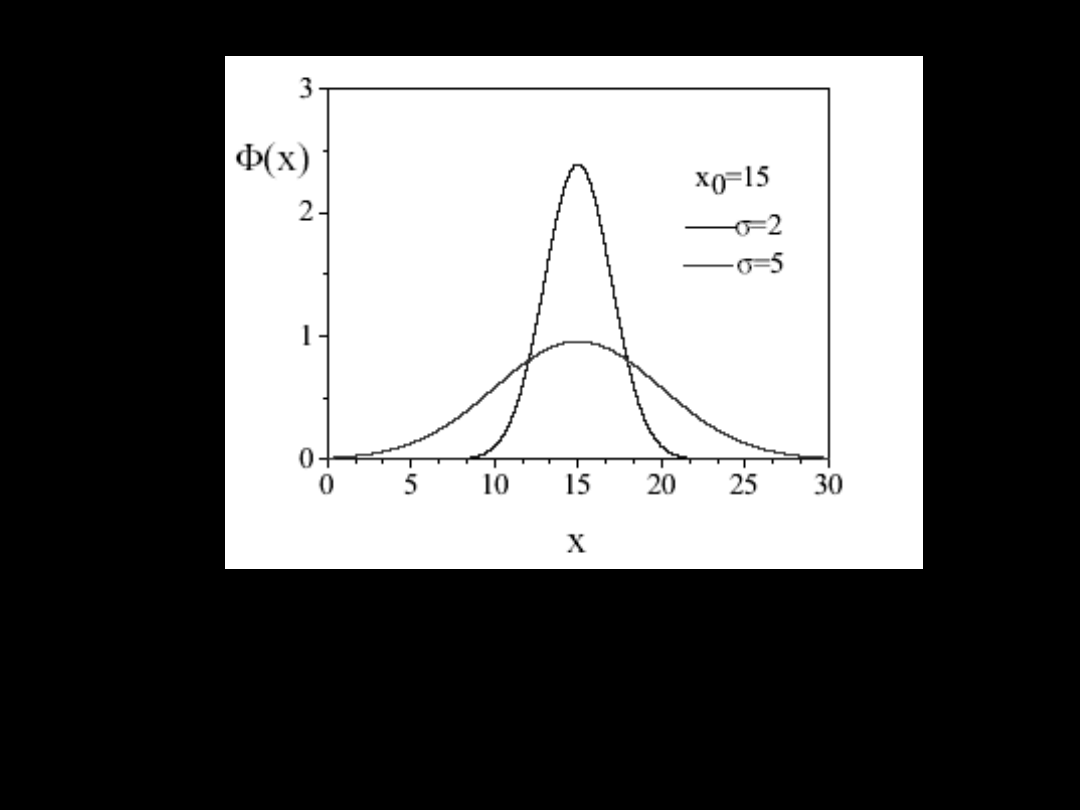
Pomiar o większym
σ
charakteryzuje się
większym rozrzutem wyników wokół
wartości średniej a zatem mniejszą
precyzją
Typ B
Dla oceny typu B wykorzystać można
m.in.:
•
dane z pomiarów poprzednich,
• doświadczenie i wiedzę na temat
przyrządów i obiektów mierzonych,
• informacje producenta przyrządów,
• niepewności przypisane danym
zaczerpniętym z literatury
Gdy informacja o pomiarze i źródle jego niepewności
jest dobra, dokładność oceny typu B jest
porównywalna z dokładnością oceny typu A.
NIEPEWNOŚĆ WIELKOŚCI
ZŁO
ż
ONEJ
–
PRAWO PRZENOSZENIA
BŁĘDU
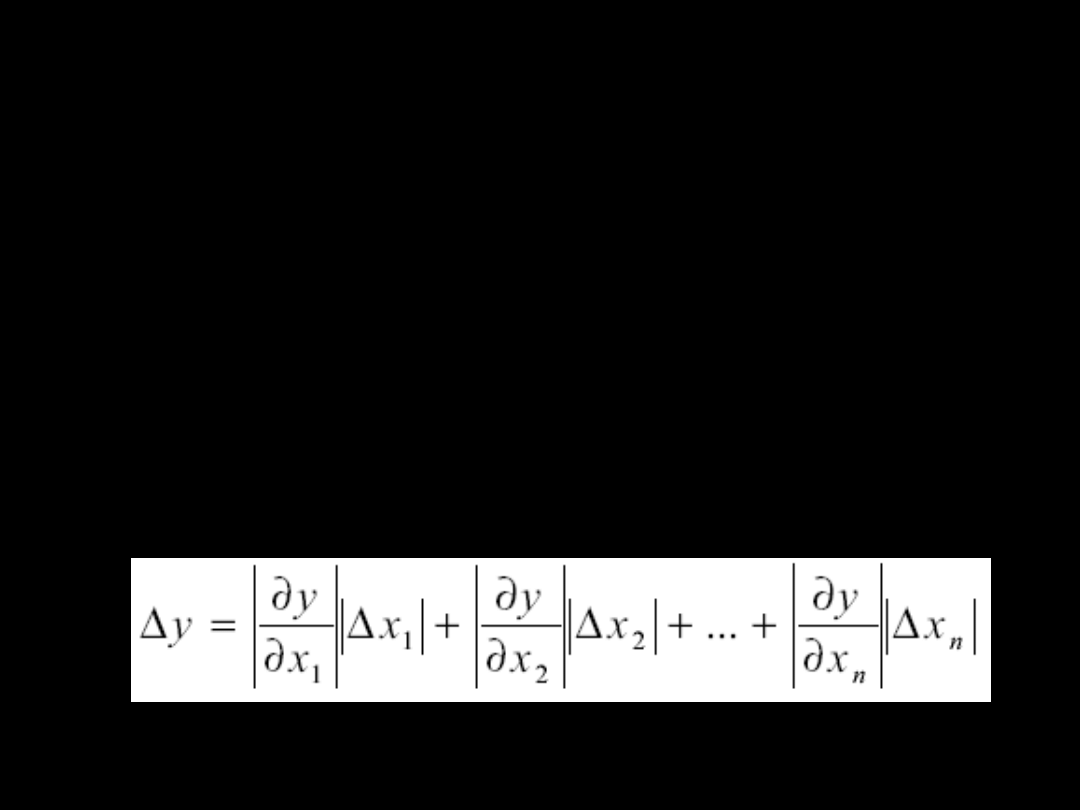
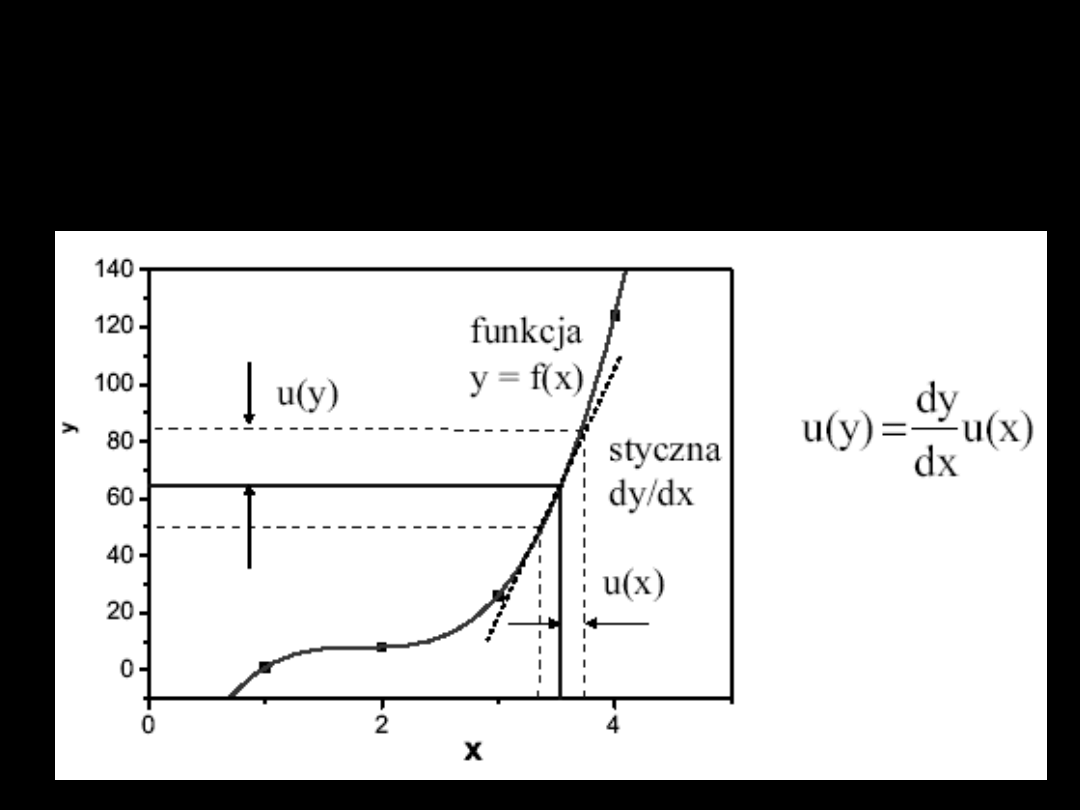
Metoda różniczki
zupełnej
Dla wielkości złożonej y=f(x
1
,x
2
,...x
n
)
gdy niepewności maksymalne Δx
1
,
Δx
2
, ... Δx
n
są małe w porównaniu z
wartościami zmiennych x
1
,x
2
, ... x
n
niepewność maksymalną wielkości y
wyliczamy z praw rachunku
różniczkowego:
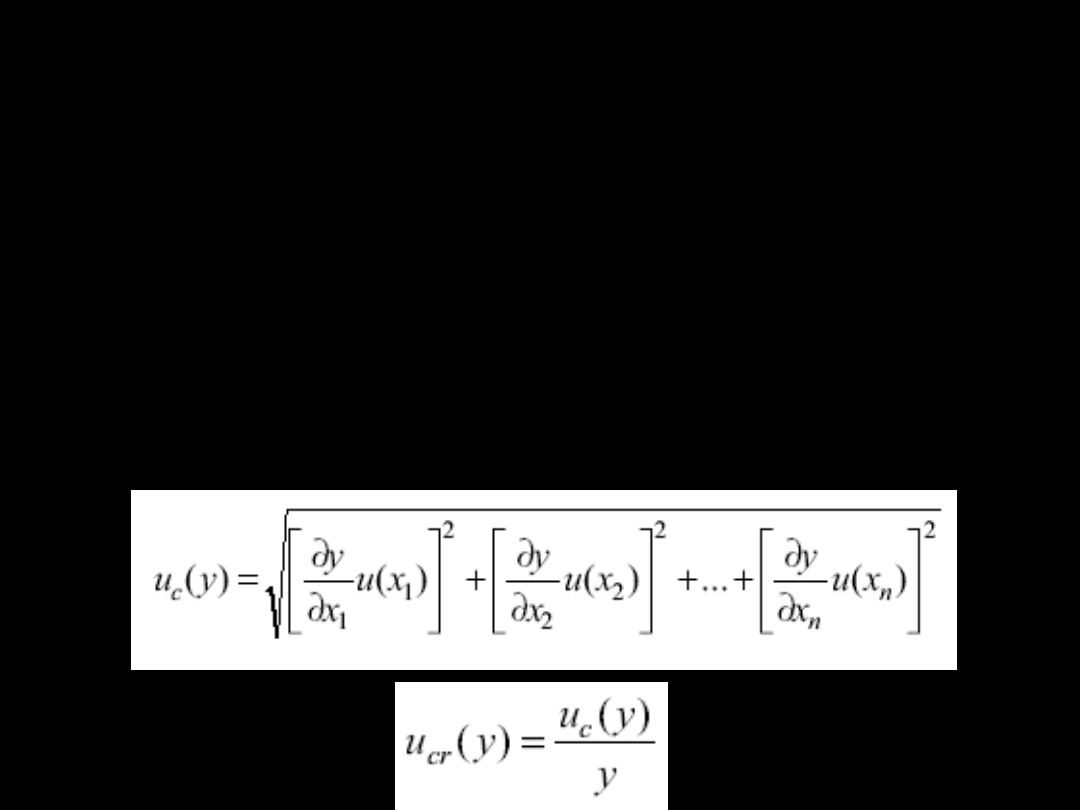
Prawo przenoszenia
niepewności
Niepewność standardową wielkości złożonej
y=f(x
1
,x
2
,...x
n
) obliczamy z tzw.
prawa
przenoszenia niepewności
jako sumę
geometryczną różniczek cząstkowych
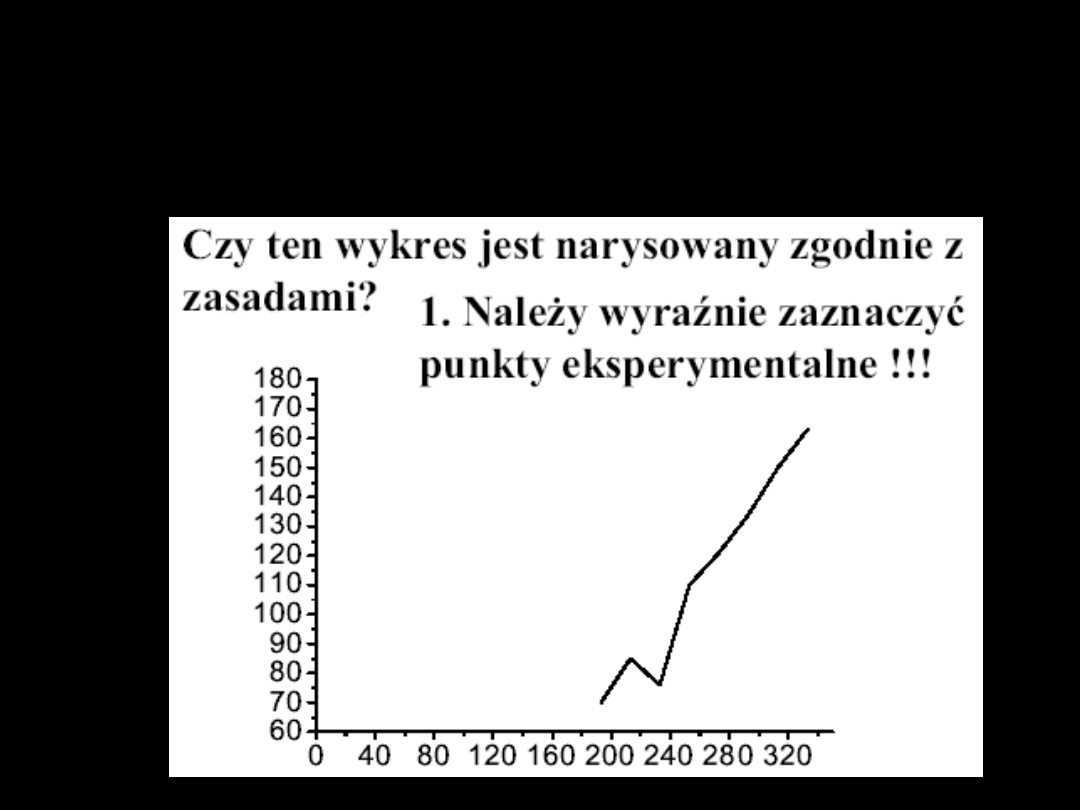
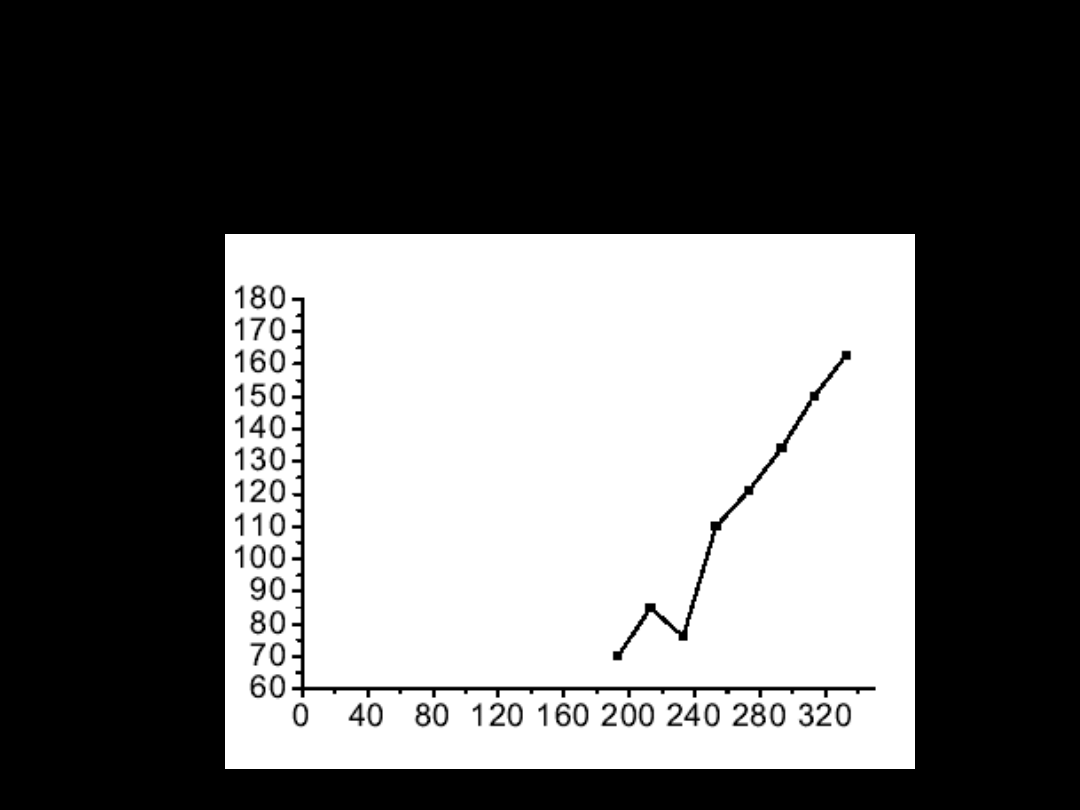
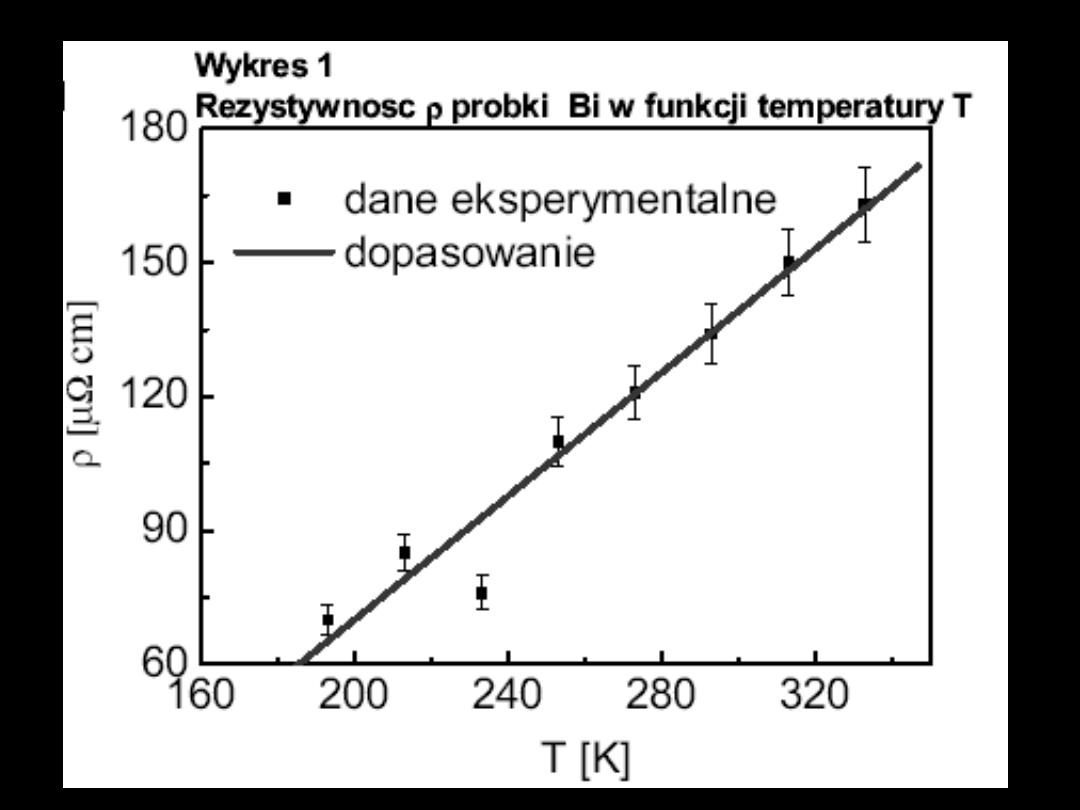
Zasada rysowania
wykresów
2. Trzeba nanieść błąd pomiaru
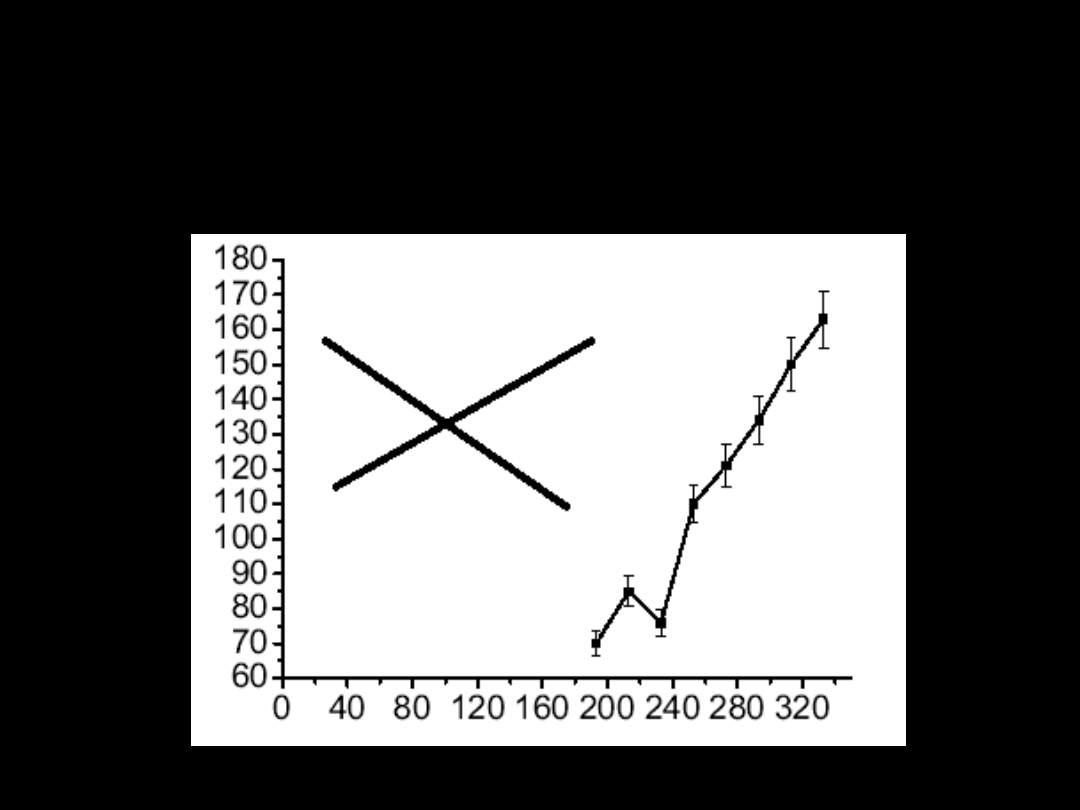
3. Dobrać zakresy osi współrzędnych
odpowiednio do zakresu zmienności danych
pomiarowych !!!
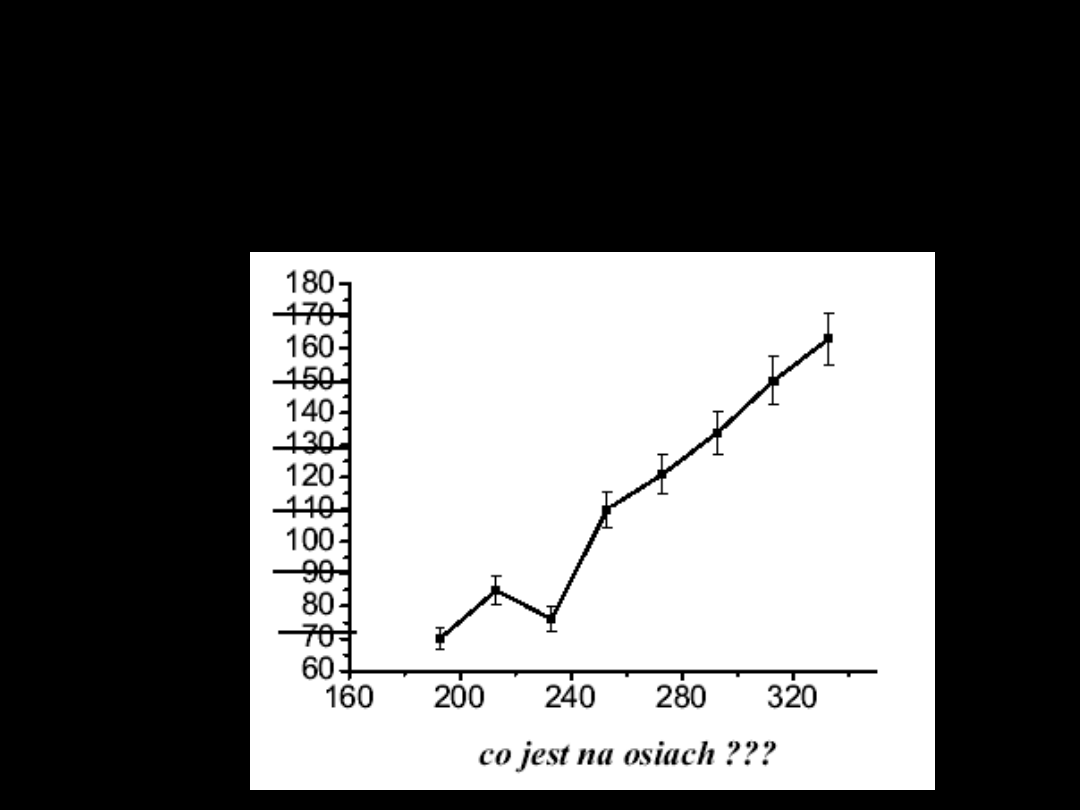
4. Właściwie opisać osie współrzędnych i
dobrać skalę, tak aby łatwo można było
odczytać wartości zmierzone.
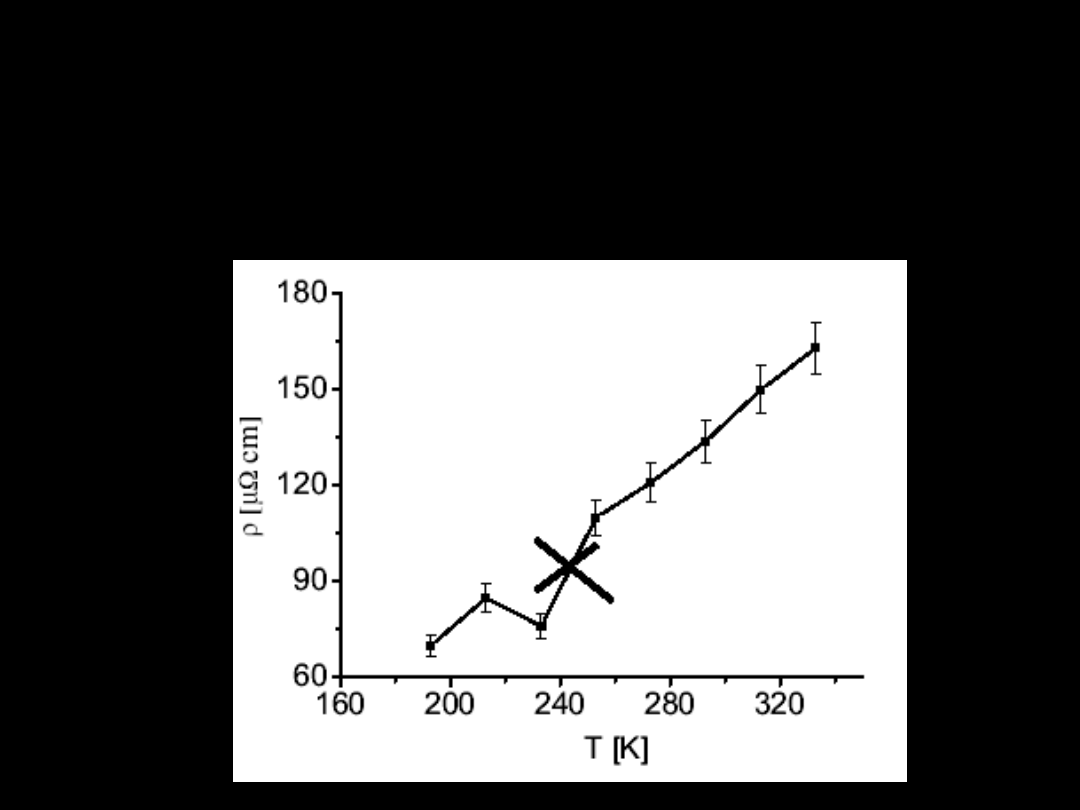
5. Nie łączyć punktów eksperymentalnych
linią łamaną!!! Jeśli znany jest przebieg
teoretyczny to dokonać dopasowania teorii
do doświadczenia
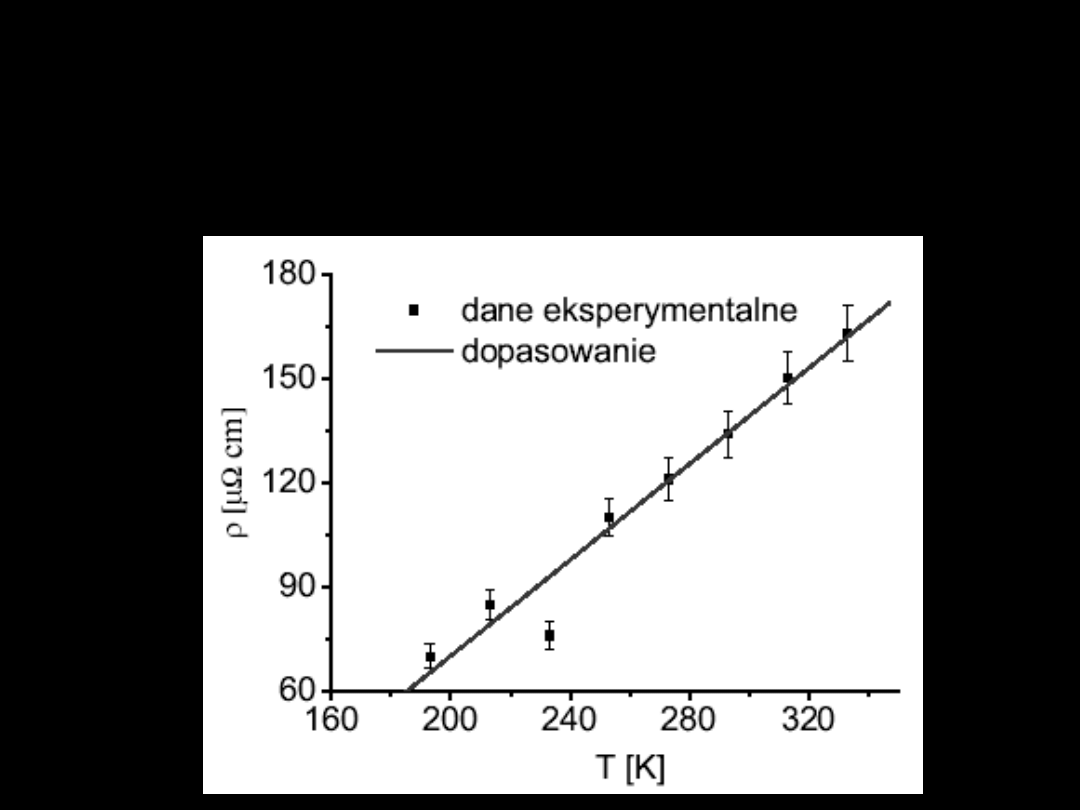
6. Zadbać o aspekt estetyczny wykresu (opis,
zamknięcie ramką, itp.)
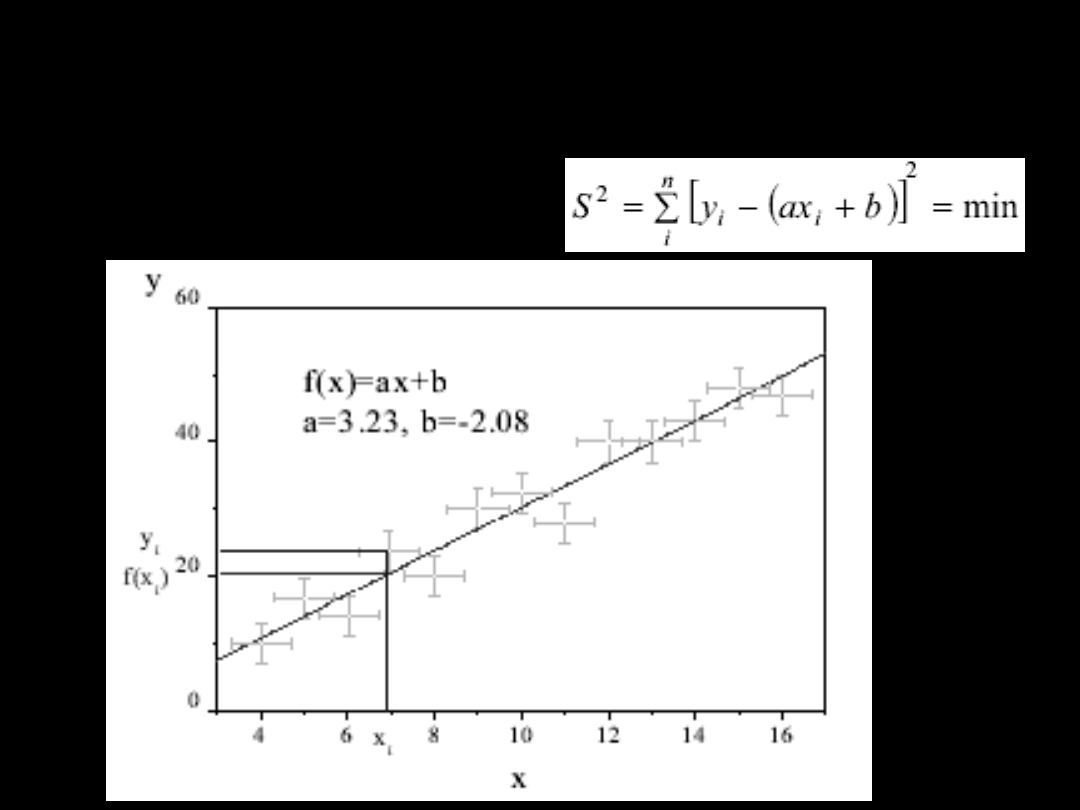
Metoda najmniejszych
kwadratów
Regresja liniowa
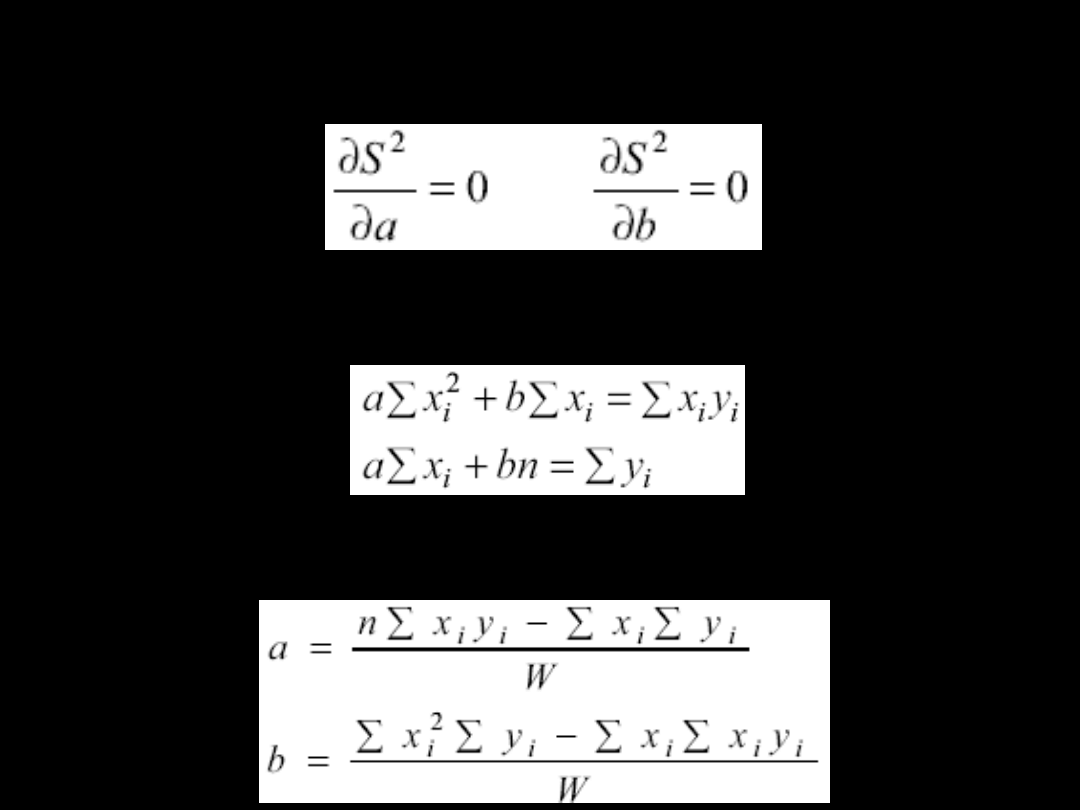
Warunek minimum funkcji dwu zmiennych:
Otrzymuje się układ równań liniowych dla
niewiadomych a i b
Rozwiązując ten układ równań otrzymuje
się wyrażenia na a i b
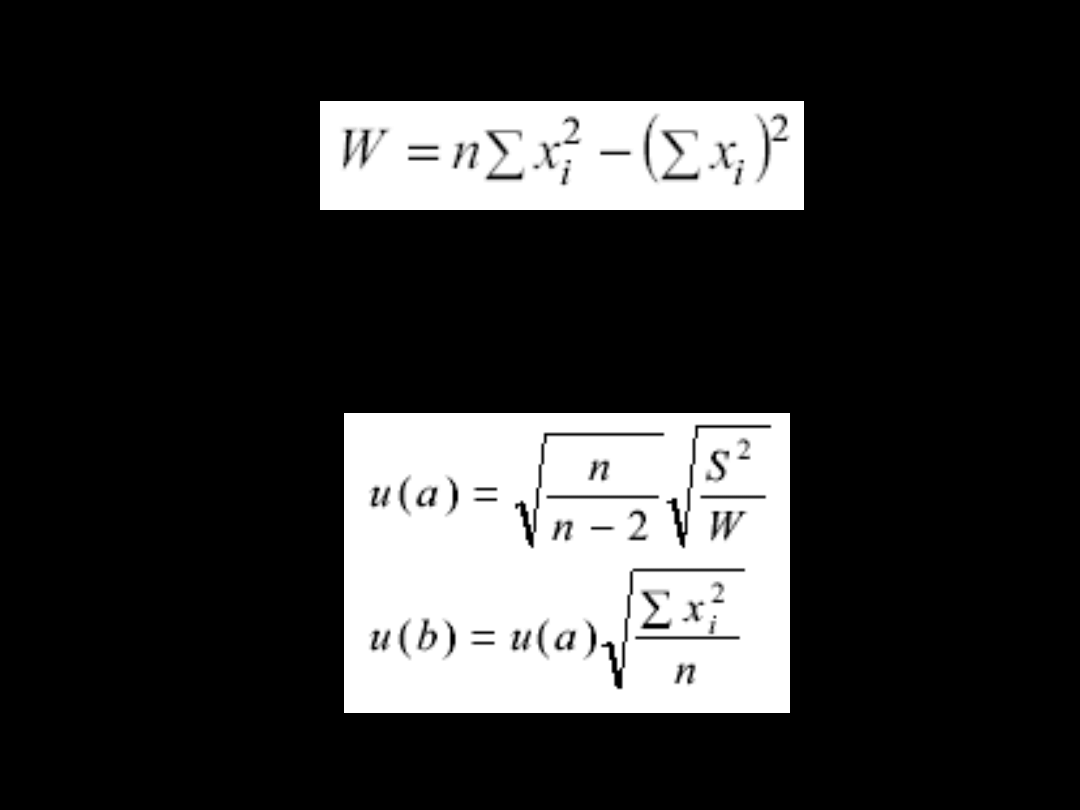
Z praw statystyki można wyprowadzić
wyrażenia na odchylenia standardowe obu
parametrów prostej:
Linearyzacja danych
eksperymentalnych
PODSUMOWANIE
• Każdy pomiar w laboratorium jest obarczony
niepewnością pomiarową, którą eksperymentator
musi określić zgodnie z pewnymi zasadami.
• W pierwszej kolejności należy przeanalizować
źródła błędów, pamiętając, aby wyeliminować
wyniki obarczone błędem grubym. W
laboratorium studenckim błędy systematyczne z
reguły przewyższają błędy przypadkowe.
•
Wielokrotne powtarzanie pomiarów, gdy
dominuje błąd systematyczny, nie ma
sensu. W takim przypadku dokonujemy tylko
3-5 pomiarów w tych warunkach w celu
sprawdzenia powtarzalności.
• Gdy błąd przypadkowy dominuje w
eksperymencie, należy sprawdzić czy
rozkład wyników może być opisany funkcją
Gaussa czy też należy spodziewać się
innego rozkładu. W tym celu dokonujemy
wielokrotnego (np. 100 razy) pomiaru w
tych samych warunkach, obliczamy średnią i
wariancję rozkładu, rysujemy histogram,
etc.)
•
Jako miarę niepewności stosujemy raczej
niepewność standardową, rzadziej
niepewność maksymalną.
• W przypadku wielkości złożonej, stosujemy
prawo przenoszenia błędu. Staramy się
przeprowadzić analizę niepewności wielkości
złożonej tak, aby uzyskać informacje
dotyczące wagi przyczynków, jakie wnoszą do
całkowitej niepewności pomiary
poszczególnych wielkości prostych. W tym
celu należy analizować niepewności
względne.
•
Ważnym elementem sprawozdania z
przebiegu eksperymentu (i to nie tylko w
laboratorium studenckim) jest wykres.
Wykresy sporządzamy zgodnie z dobrymi
zasadami, pamiętając o jednoznacznym
opisie.
• Zawsze, gdy to możliwe, dokonujemy
linearyzacji danych eksperymentalnych, np.
rysując y i ln (x), lub log y i log x, lub y i 1/x
itp. Do tak przygotowanych danych można
zastosować metodę regresji liniowej
•
Jeżeli znane są podstawy teoretyczne
badanego zjawiska, na wykresie
zamieszczamy krzywą teoretyczną (linia
ciągła) na tle wyraźnych punktów
eksperymentalnych (dobieramy
odpowiednie symbole i nanosimy
niepewności eksperymentalne). Możemy
wcześniej dokonać dopasowania
parametrów przebiegu teoretycznego w
oparciu o znane metody „dopasowania”
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
- Slide 75
- Slide 76
- Slide 77
- Slide 78
- Slide 79
- Slide 80
- Slide 81
- Slide 82
Wyszukiwarka
Podobne podstrony:
Struktura źródeł błędów w procesie pomiarowym, PWR Politechnika Wrocławska, podstawy metrologii, Wyk
Dodatkowe nr 1 (1), sem II, Podstawy Technologii Okrętów - Wykład.Laboratorium, Laboratorium nr 1 (1
Sprawozdanie nr 1 (1), sem II, Podstawy Technologii Okrętów - Wykład.Laboratorium, Laboratorium nr 1
KLASYFIKACJA BŁĘDÓW a1x, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
KLASYFIKACJA BŁĘDÓW ZE WZGLĘDU NA ICH CH ARAKTER a, PWR mbm, Podstawy metrologii
teoria bledow 2
5 Podstawy Metrologii systemy pomiarowe
Podstawy Metrologii
Zadanie z pasowania otwarte, PWR Politechnika Wrocławska, podstawy metrologii, Wykłady 2011
ściąga metrologia (2), PWR mbm, Podstawy metrologii
2 Teoria Bledow Pomiarow
Podstawy Metrologii Pomiary małych rezystancji za pomoca mostka 6 ramiennego Protokol
Wyznaczanie niepewności pomiarów, PWr W9 Energetyka stopień inż, II Semestr, Podstawy metrologii i t
Podstawy metrologii, Polibuda (MiBM), Semestr III, III semestr, od Arniego, 3 semester, sebastianowe
teoria bledow
Podstawy Metrologii 12 2 BPPPA P
więcej podobnych podstron