© Dr inż. JANUSZ LICHOTA
PODSTAWY AUTOMATYKI
Regulatory PID, część I
Wydział Mechaniczno-
Energetyczny
Wrocław 2006

PLAN WYSTĄPIENIA
• Klasyfikacja regulatorów
• Regulator PID – co to jest?
• Typowe struktury regulatorów
• Regulator PID – jak on działa?
Charakterystyki czasowe
• Regulator PID – jak on działa?
Charakterystyki częstotliwościowe
• Próba strojenia regulatora
Sposób budowy:
·
bezpośredniego działania
·
o działaniu pośrednim
Nośnik energii zasilającej
regulator:
·
elektroniczne
·
pneumatyczne
·
hydrauliczne
Sposób zmiany wielkości
nastawiającej
organ wykonawczy:
·
regulatory o wyjściu ciągłym
·
impulsowym
·
dwustawnym
·
trójstawnym
Właściwości dynamiczne:
·
proporcjonalne, typu P
·
całkowy, typu I
·
PI, PD, PID
Zasadę działania:
·
regulatory klasyczne, z
grupy PID
·
sieci neuronowe
·
logikę rozmytą (fuzzy logic)
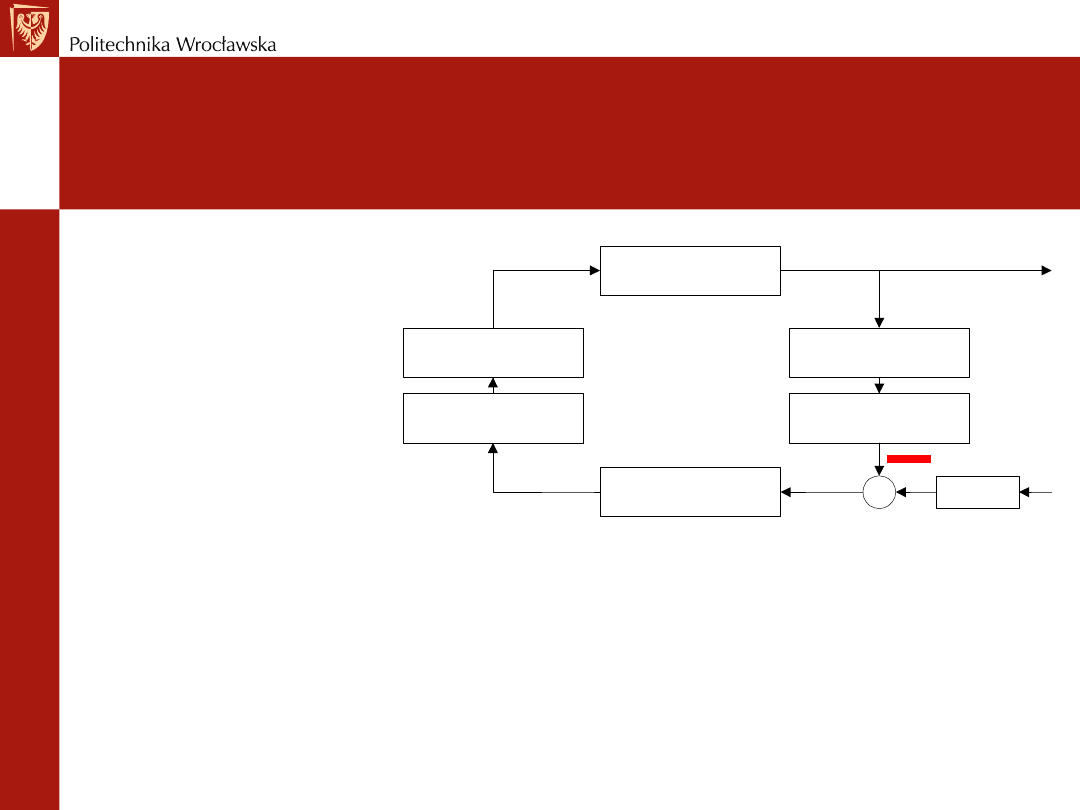
REGULATORY
Klasyfikacja
Obiekt
Czujnik
Przetwornik
Regulator
Siłownik
Nastawnik
Zadajnik
u(t)
e(t)

Obecnie 95 % układów regulacji na świecie jest wyposażonych w regulator z grupy PID
REGULATOR PID
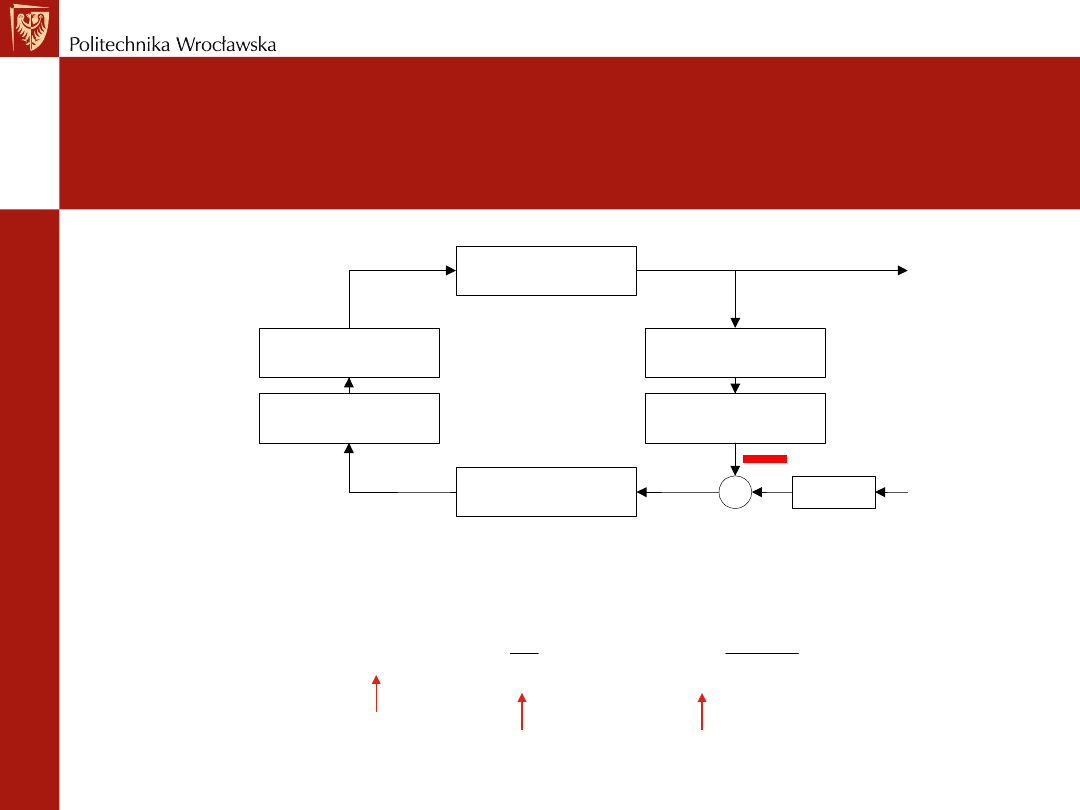
REGULATOR PID
Co to jest?
Pomysł Minorskiego, 1922
Obiekt
Czujnik
Przetwornik
Regulator
Siłownik
Nastawnik
Zadajnik
u(t)
e(t)
u t
k e t
T
e d
T
de t
dt
p
i
t
d
( )
( )
( )
( )
1
0
Współczynnik
wzmocnienia
regulatora
Stała zdwojenia
(całkowania)
Stała wyprzedzenia
(różniczkowania)
REGULATOR PID
Typowe struktury
G s
k
r
p
( )
G s
k
T s
r
p
d
( )
1
G s
k
Ts
r
p
i
( )
1
1
G s
k
Ts
T s
r
p
i
d
( )
1
1
Regulator proporcjonalny
P
Regulator proporcjonalno-całkujący
PI
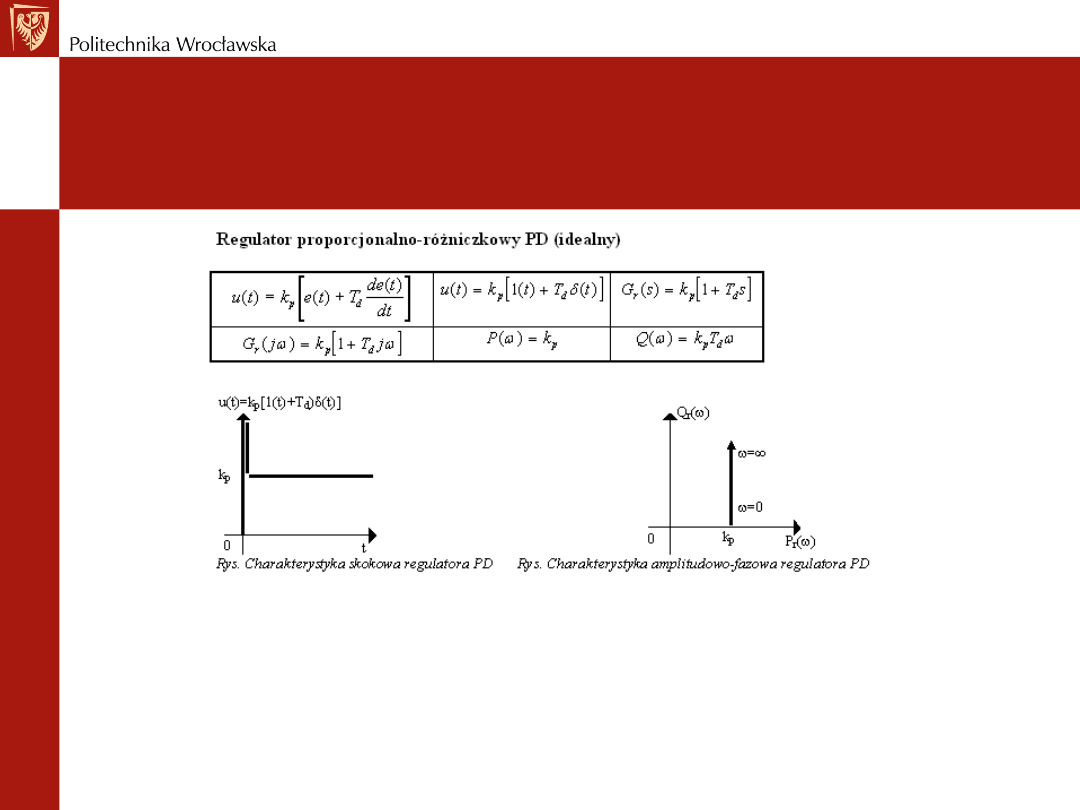
Regulator proporcjonalno-różniczkujący
PD
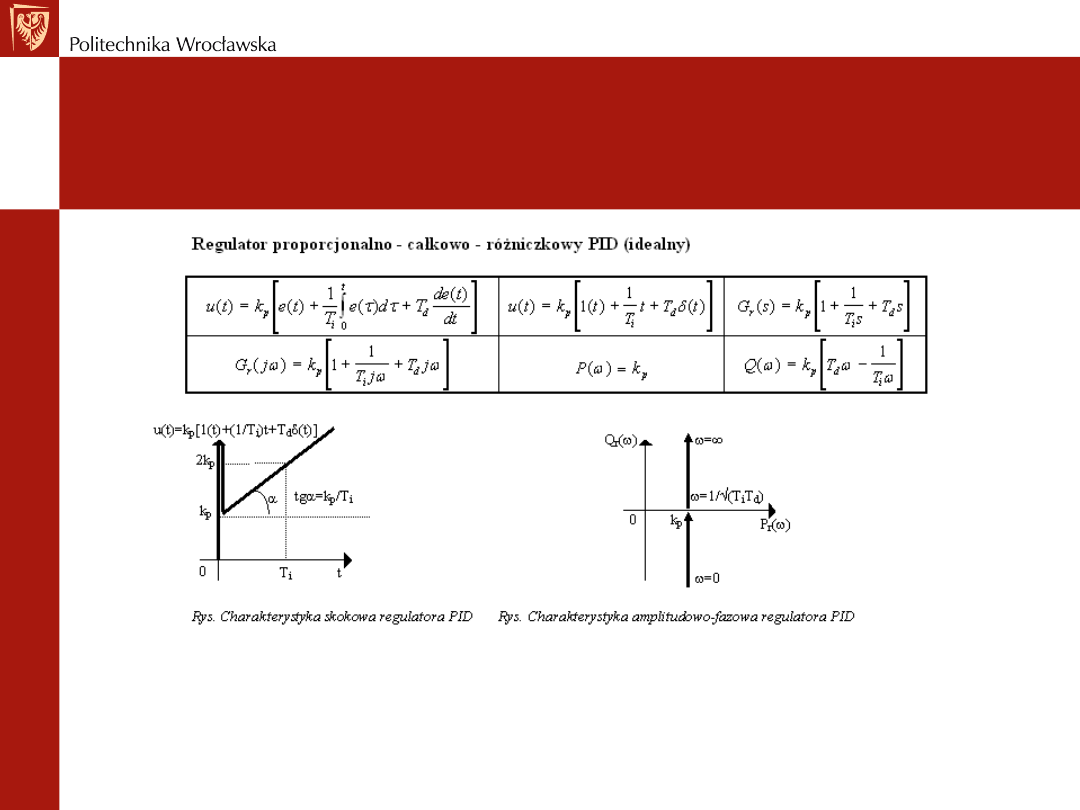
Regulator proporcjonalno-całkująco-różniczkujący
PID
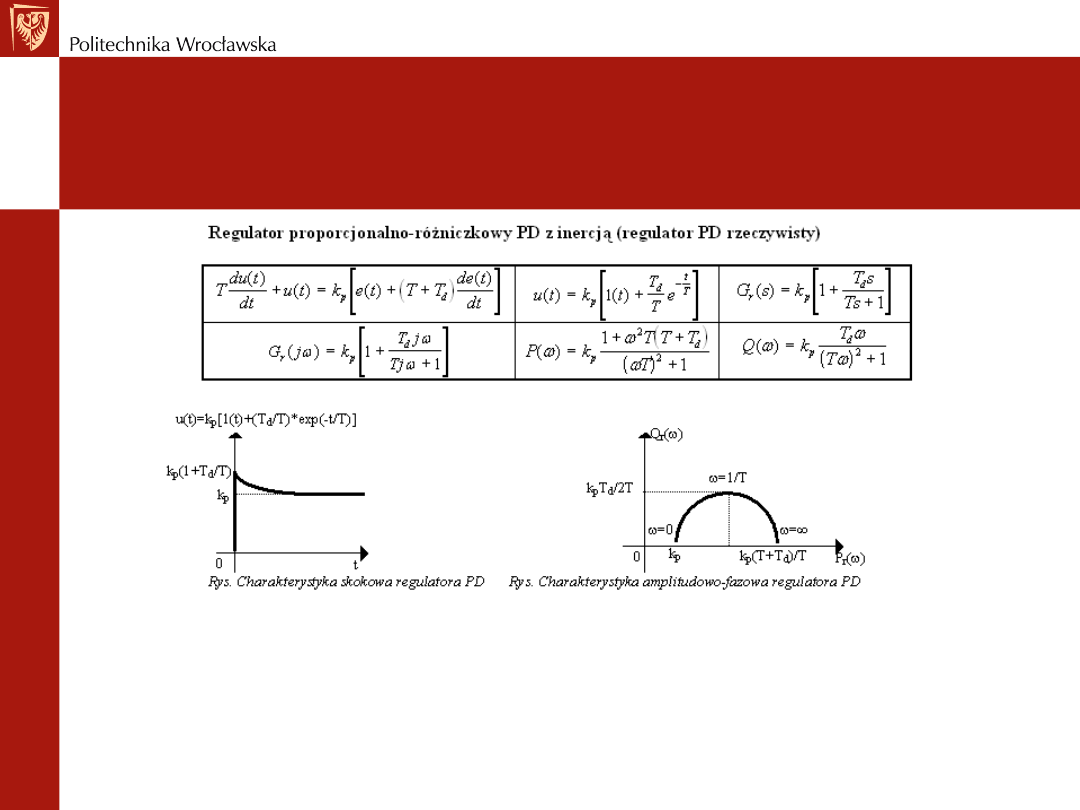
W celu uwzględnienia nieidealnego różniczkowania, które ma miejsce w
rzeczywistych regulatorach wprowadzono człon inercyjny połączony szeregowo z
członem różniczkującym. Wartość N we wzorze jest miarą niedoskonałości działania
części różniczkującej.
1
1
( )
1
.
1
d
c
c
d
i
T s
G s
K
T s
Ts
N
�
�
�
�
�
� +
=
+
�
�
�
�
�
��
�
+
�
�
REGULATOR PID
Typowe struktury
Można wyróżnić dwie formy przedstawienia regulatora PID
-równoległą
-i szeregową
2
1
( )
1
1
r
p
d
i
d i
p i
i
G s
k
T s
Ts
T Ts
k Ts
Ts
�
�
=
+
+
�
�
�
�
+
+
=
(
)
1
( )
1
1
1
r
p
d
i
i
d
p
d
i
i
G s
k
T s
Ts
T T
k
T s
T
Ts
�
�
=
+
+
�
�
�
�
�
�
+
=
+
+
�
�
�
�
%
%
%
% %
%
%
%
%
Zależności pomiędzy współczynnikami są następujące
,
,
i
d
i d
p
p
i
i
d
d
i
i
d
T T
TT
k
k
T T T T
T
T T
+
=
= +
=
+
% %
%%
%
% %
%
% %
Należy znać transmitancję regulatora, aby prawidłowo zastosować procedurę strojenia.
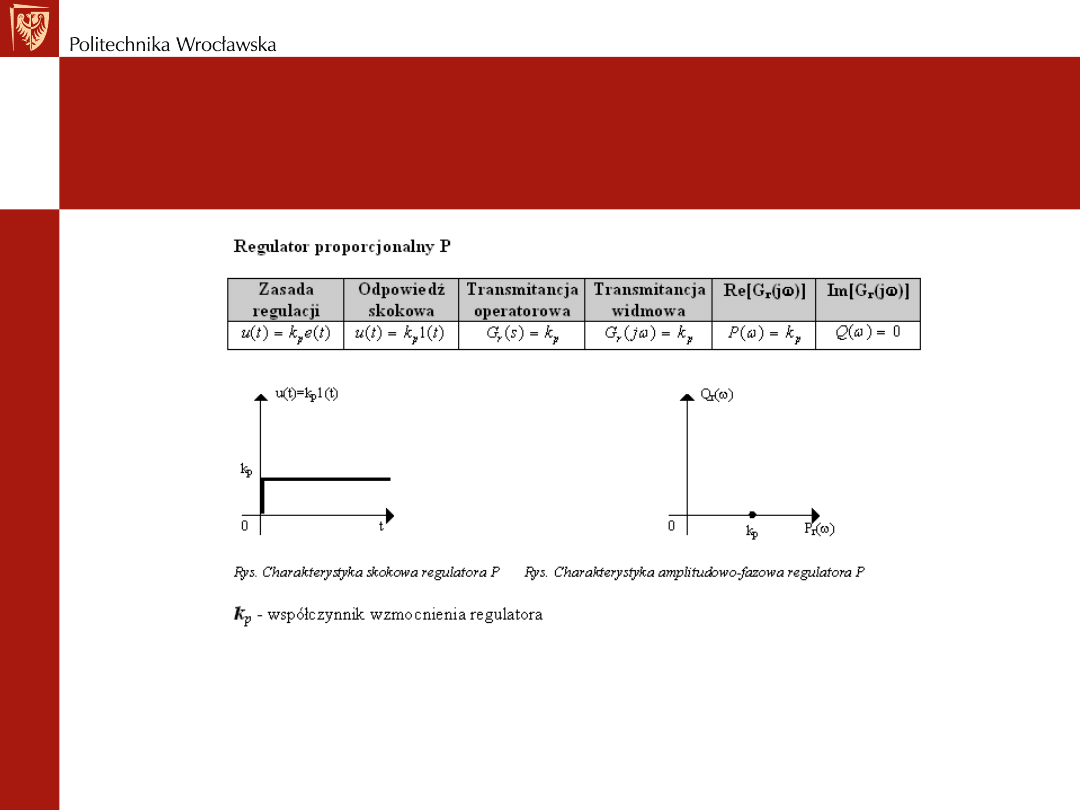
kp
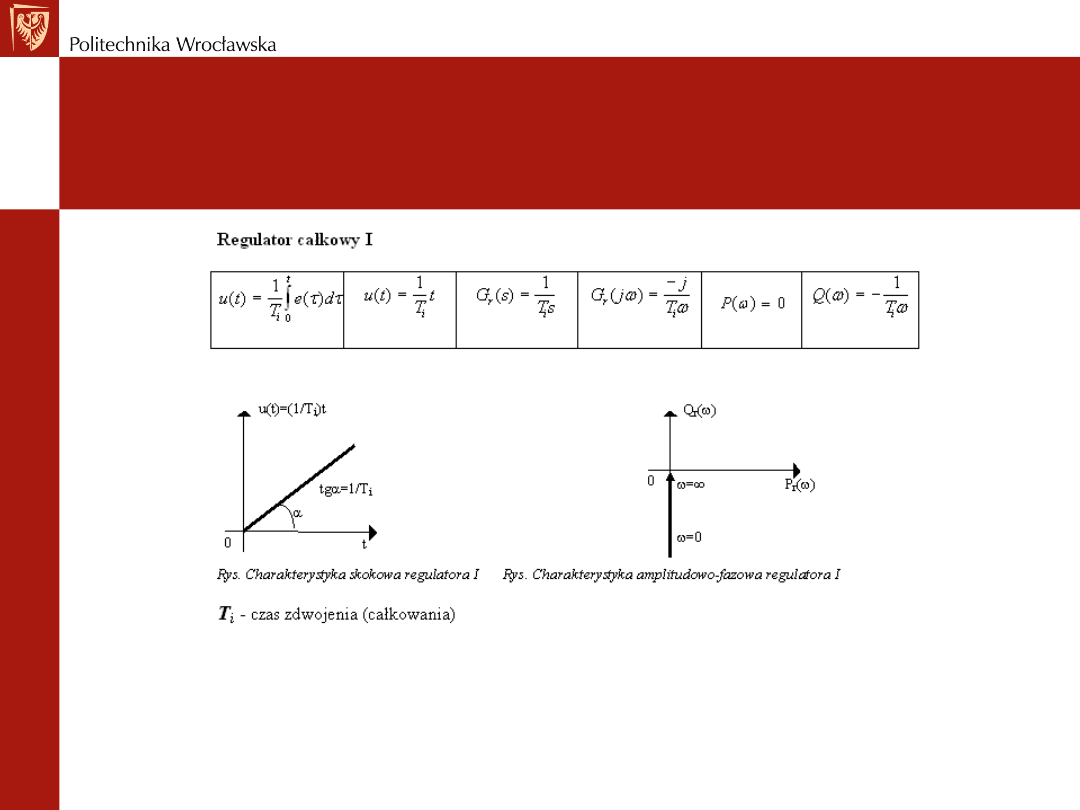
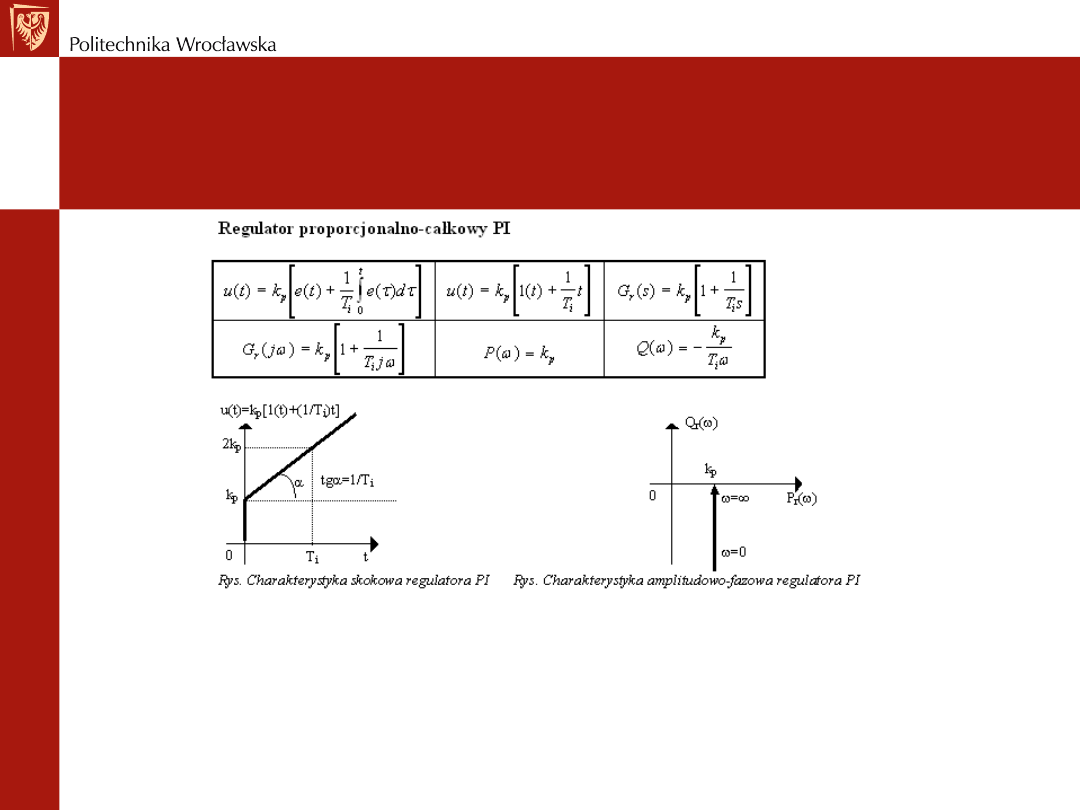
Ti
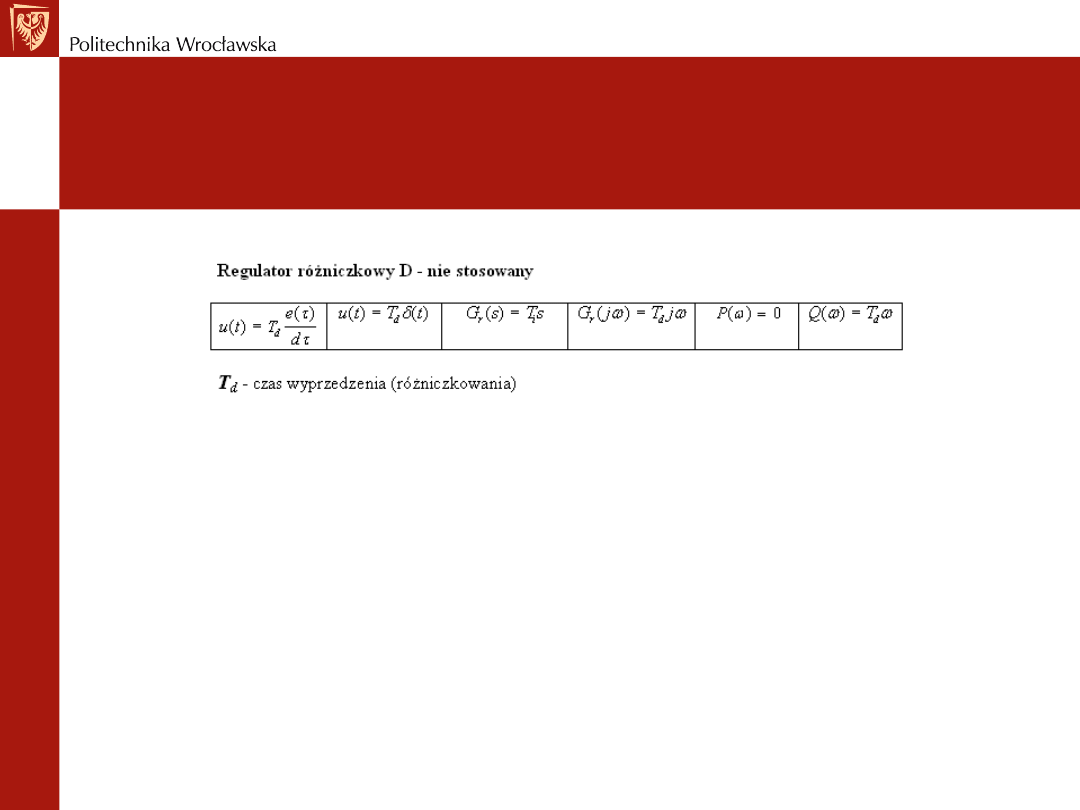
Td
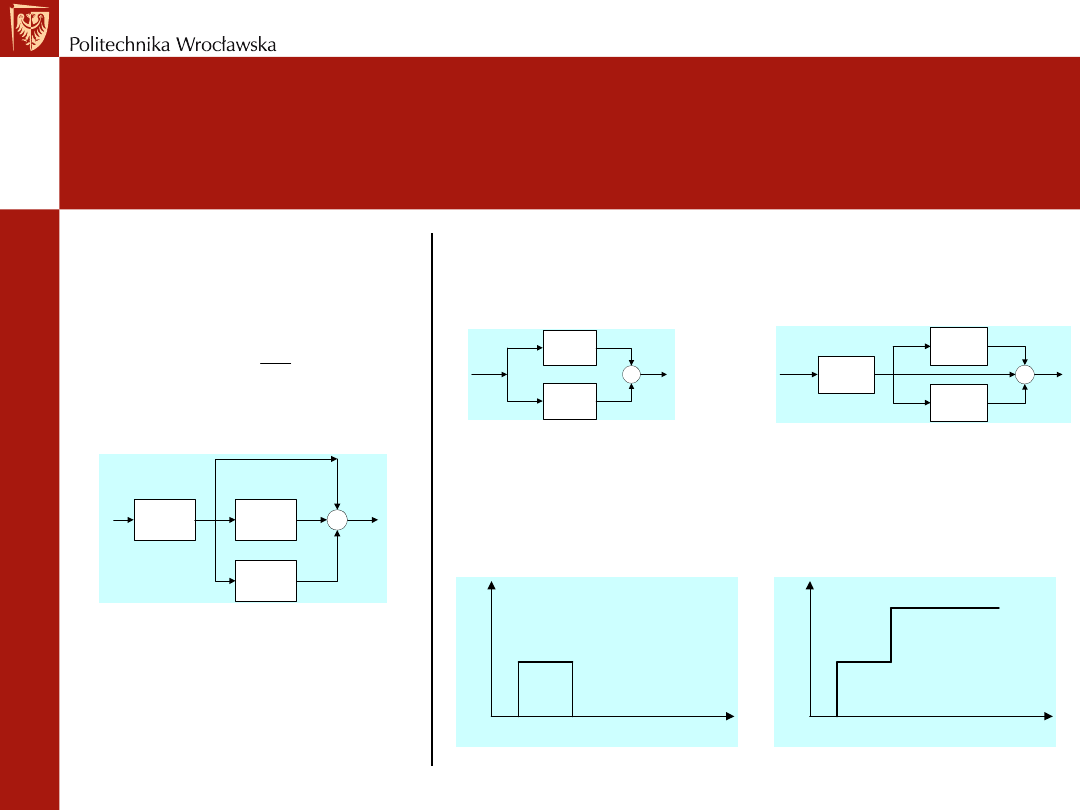
Schemat strukturalny
regulatora PID
2
3s
Jaki to typ regulatora i jakie nastawy ma regulator o
strukturze z rysunku ?
3s
1/(4s)
2
Jaka jest odpowiedź regulatora P, I, PD, PI, PID na sygnał
przedstawiony na rysunku?
t
x(t)
t
x(t)
e(t)
u(t)
REGULATOR PID
Typowe struktury – przykład 1
a)
a)
b)
b)
G s
k
Ts
T s
r
p
i
d
( )
1
1
t
x(t)
5
10
5
t
u(t)
5
5
10
10
-5
0
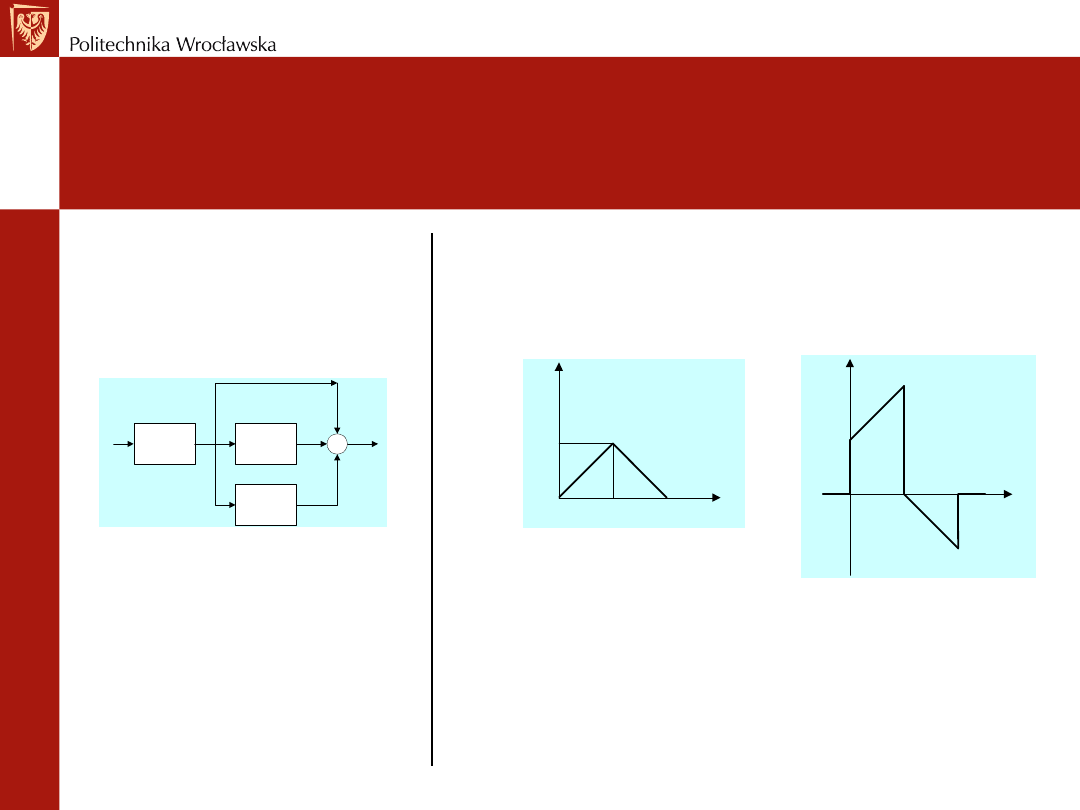
Jaki to regulator ?
REGULATOR PID
Typowe struktury – przykład 2
kp
Ti
Td
Schemat strukturalny
regulatora PID
e(t)
u(t)
REGULATOR PID
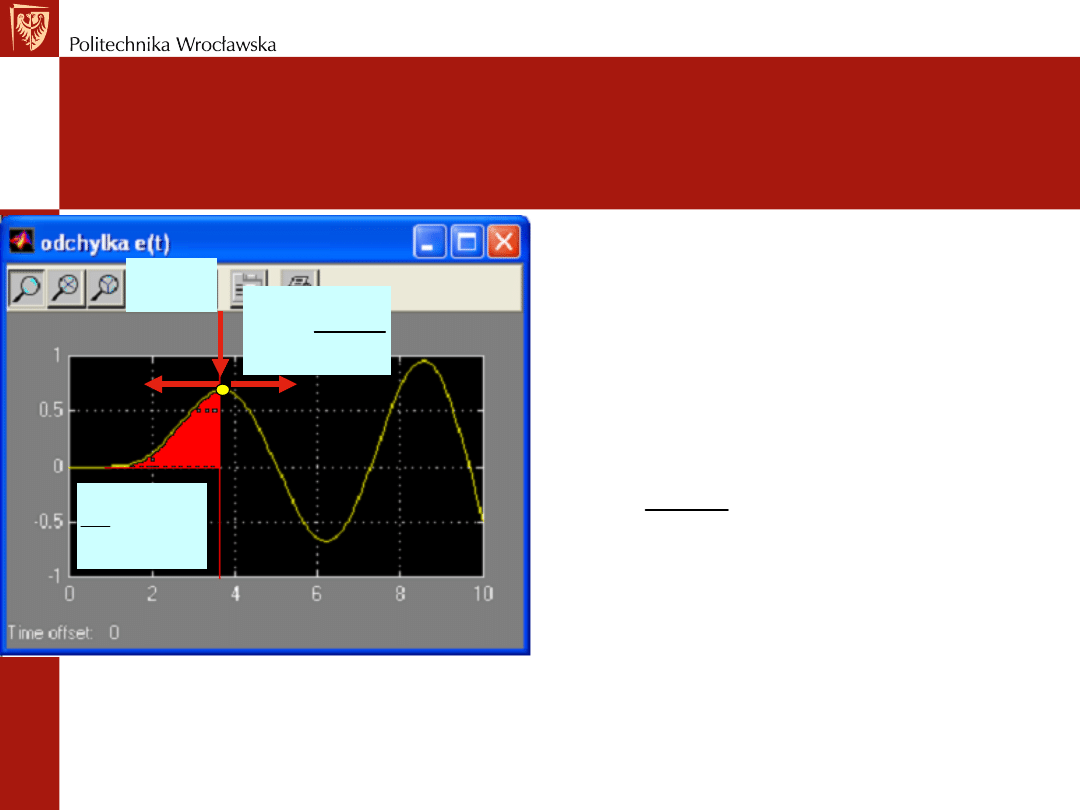
Jak on działa? Charakterystyki
czasowe
PID
Obiekt
0
( )
t
p
i
k
e d
T
t t
�
( )
p
k e t
( )
p d
de t
k T
dt
Część proporcjonalna reaguje na bieżącą odchyłkę
Część całkująca reaguje na sumaryczną odchyłkę
z przeszłości
Część różniczkująca reaguje na możliwą przyszłą
odchyłkę
przyszłość
przeszłość
teraźniejszość
e(t)
u(t)
u t
k e t
T
e
d
T
de t
dt
p
i
t
d
( )
( )
( )
( )
1
0
( )
p
k e t
przyszłość
przeszłość
teraźniejszość
REGULATOR PID
Jak on działa? Charakterystyki
czasowe
Czy nie można by poprzestać na części
proporcjonalnej regulatora?
Regulator
Obiekt
z
-
Transmitancja zastępcza układu ma postać
( )
( )
( )
1
( ) ( ) 1
( )
o
o
o
r
p o
G s
G s
G s
G s G s
k G s
=
=
+
+
Sprawdźmy wartość odchyłki regulacji w stanach
ustalonych tj. po nieskończonym czasie

REGULATOR PID
Jak on działa? Charakterystyki
czasowe
0
0
0
0
0
0
1
( )/ ( )
( )
lim ( ) lim ( ) lim
( ) lim
lim
1
( )/ ( )
( )
( )
t
s
s
s
s
p
p
p
b
L s M s
L s
y t
sY s
s G s
s
k L s M s
M s k L s
a
k
�+�
�
�
�
�
=
=
=
=
=
+
+
+
Niech obiekt będzie opisany transmitancją wymierną
( )
1
1
1
0
o
1
1
1
0
...
( )
G
...
( )
m
m
m
m
n
n
n
b s
b s
bs b
L s
s
s
a s
a s a
M s
-
-
-
-
+
+ + +
=
=
+
+ +
+
Wówczas
sygnał wyjściowy jest różny od zera (a to jest wartość zadana).
Pojawia się odchyłka statyczna sygnału wyjściowego.
0
( )
t
p
i
k
e d
T
t t
�
( )
p
k e t
przyszłość
przeszłość
teraźniejszość
REGULATOR PID
Jak on działa? Charakterystyki
czasowe
Jak zlikwidować odchyłkę statyczną regulatora?
Wprowadźmy część całkującą odchyłkę regulacji
0
( )
( )
( )
t
p
p
i
k
u t
k e t
e
d
T
t
t
=
+
�
W punkcie pracy układu regulacji sygnał sterujący
jest stały u=u
0
. Podobnie odchyłka e=e
0
.
0
0
0
0
0
0
0
t
p
p
p
p
p
p
i
i
i
k
k
k
u
k e
e d
k e
e t
e k
t
T
T
T
t
�
�
=
+
=
+
=
+
�
�
�
�
�
Odchyłka musi spełnić warunek
e
0
=0,
jeżeli założenie o stałości nie ma być zaprzeczone.
(
)
0
0
0
0
( )
1
( )/ ( )
lim ( ) lim
( ) lim
lim
0
1
1 1/
( )/ ( )
( )
( )
i
s
s
s
s
p
i
i
p i
p
TsL s
L s M s
sY s
s G s
s
k
Ts L s M s
TsM s k TsL s k L
�
�
�
�
=
=
=
=
+
+
+
+
Dowód w oparciu o transmitancje jest następujący
REGULATOR PID
Jak on działa? Charakterystyki
czasowe
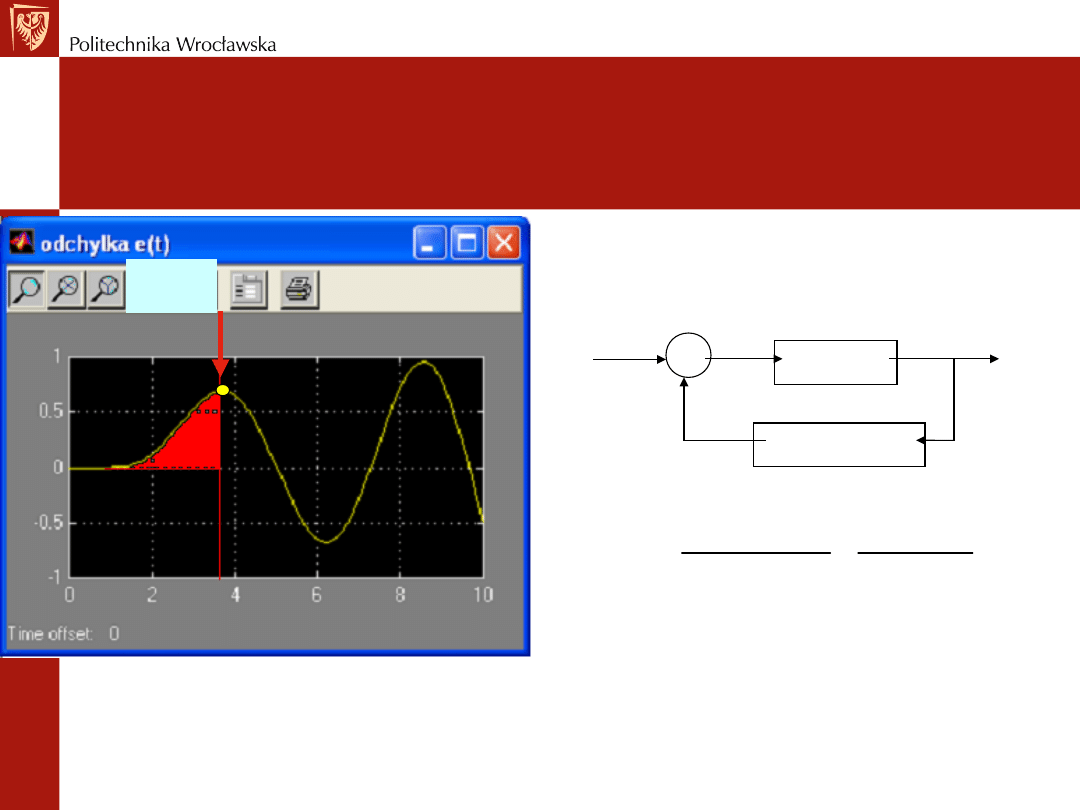
Wadą części całkującej jest jej ciągły wzrost w przypadku, gdy odchyłka przez dłuższy
czas jest różna od zera. Taka sytuacja ma miejsce np. wtedy, gdy w układzie regulacji
występuje siłownik stałoprędkościowy.
Regulator
Obiekt
z
-
u
u
1
u
1
u
Linia nasycenia siłownika ogranicza możliwości
redukcji odchyłki regulacji przez regulator.
Widocznym efektem jest np. 100% otwarcie
zaworu przez długi czas i rosnąca wartość
sygnału sterującego powyżej 100% otwarcia
zaworu. Taki sygnał nie może być zrealizowany
fizycznie. Gdy odchyłka regulacji zacznie spadać
wówczas najpierw osiąga wartość 100% otwarcia
zaworu. Następnie dopiero zbliża się do stopnia
otwarcia wymaganego w danych warunkach pracy.
REGULATOR PID
Jak on działa? Charakterystyki
czasowe
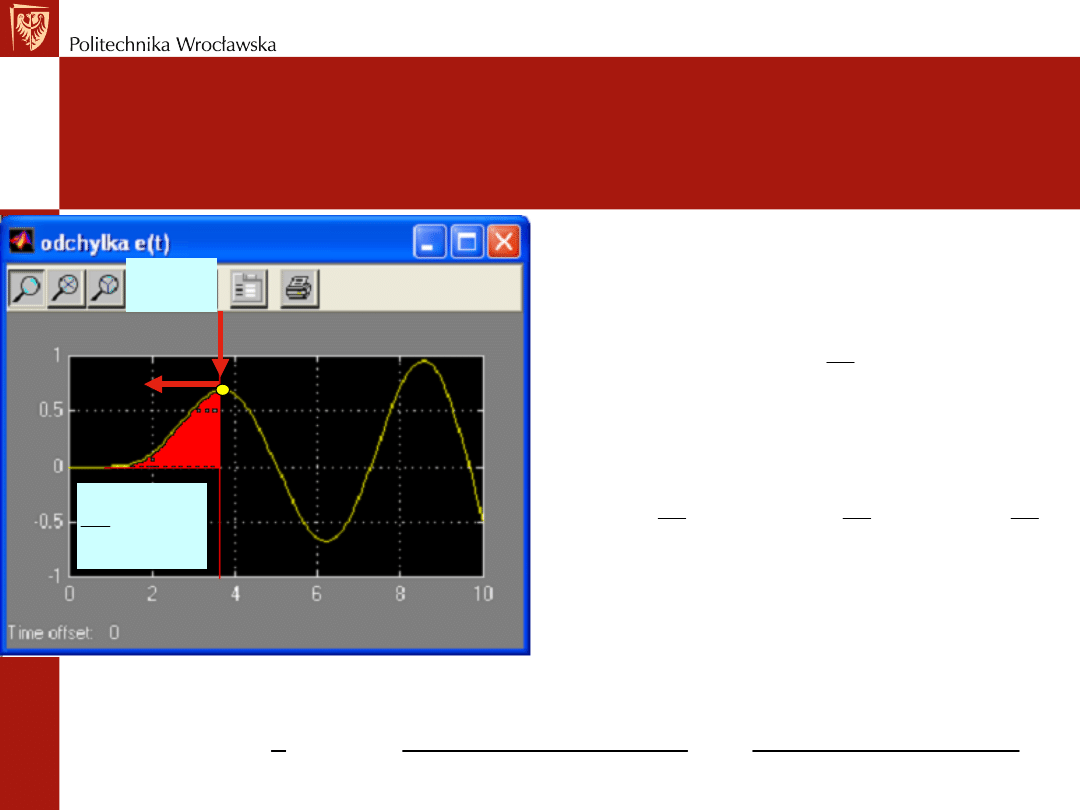
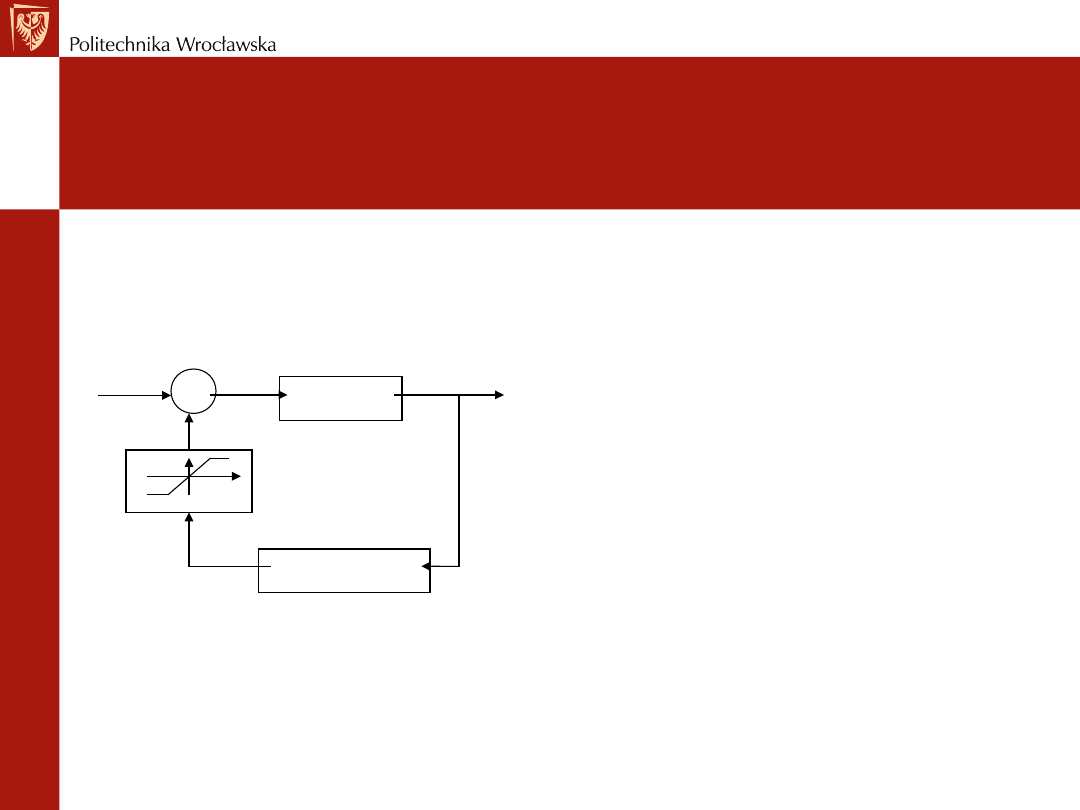
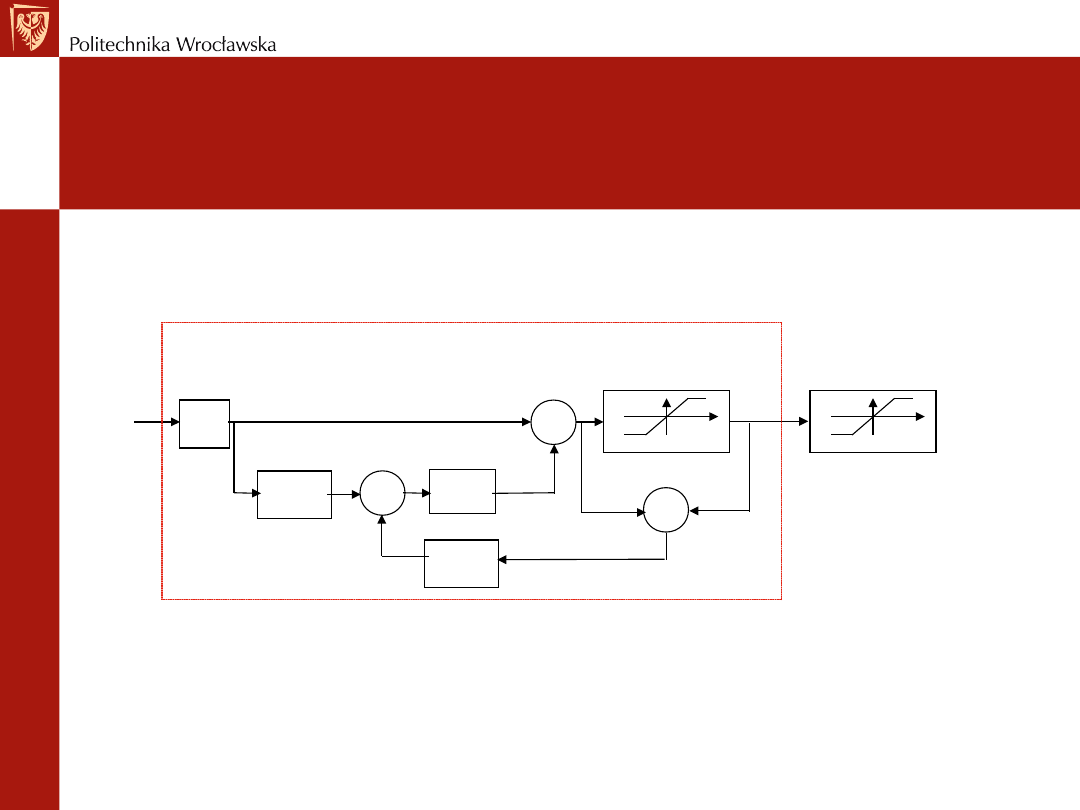
Aby zapobiec takiej niekorzystnej zmianie sygnałów można programowo ograniczyć
wartość części całkującej (np. warunkiem if eI > 100 then eI := 100; ) lub zastosować
poniższe rozwiązanie.
k
p
e
I
= u
1
-u
-
u
u
1
u
1/T
i
1/s
1/T
i
u
Model
siłownika
Siłownik
e(t)
Jeżeli odchyłka e
I
nie jest równa zero, to znaczy, że siłownik osiągnął nasycenie. Wówczas,
w przypadku u > 100%, od części całkującej jest odejmowana nadwyżka ponad 100%.
Podobnie dla u < 0%. Jeżeli 0<u<100%, to e
I
=0.
0
( )
t
p
i
k
e d
T
t t
�
( )
p
k e t
przyszłość
przeszłość
teraźniejszość
REGULATOR PID
Jak on działa? Charakterystyki
czasowe
Problem części różniczkującej: różniczkowanie
sygnału szybkozmiennego prowadzi do dużych
zmian sygnału sterującego. Jeżeli sygnał
wyjściowy z obiektu ma postać
( )
p d
de t
k T
dt
( ) sin(
)
y t
t
w
=
to
( )
cos(
)
dy t
t
dt
w
w
=
Jeżeli pulsacja sygnału wyjściowego z obiektu
wynosi =100 rad/s, to jest ona 100 razy większa
od sygnału y(t) przy pulsacji =1 rad/s.
Rozwiązanie problemu części różniczkującej.
W przemysłowych regulatorach stosowane jest
rozwiązanie polegające na modyfikacji części
różniczkującej filtrem inercyjnym
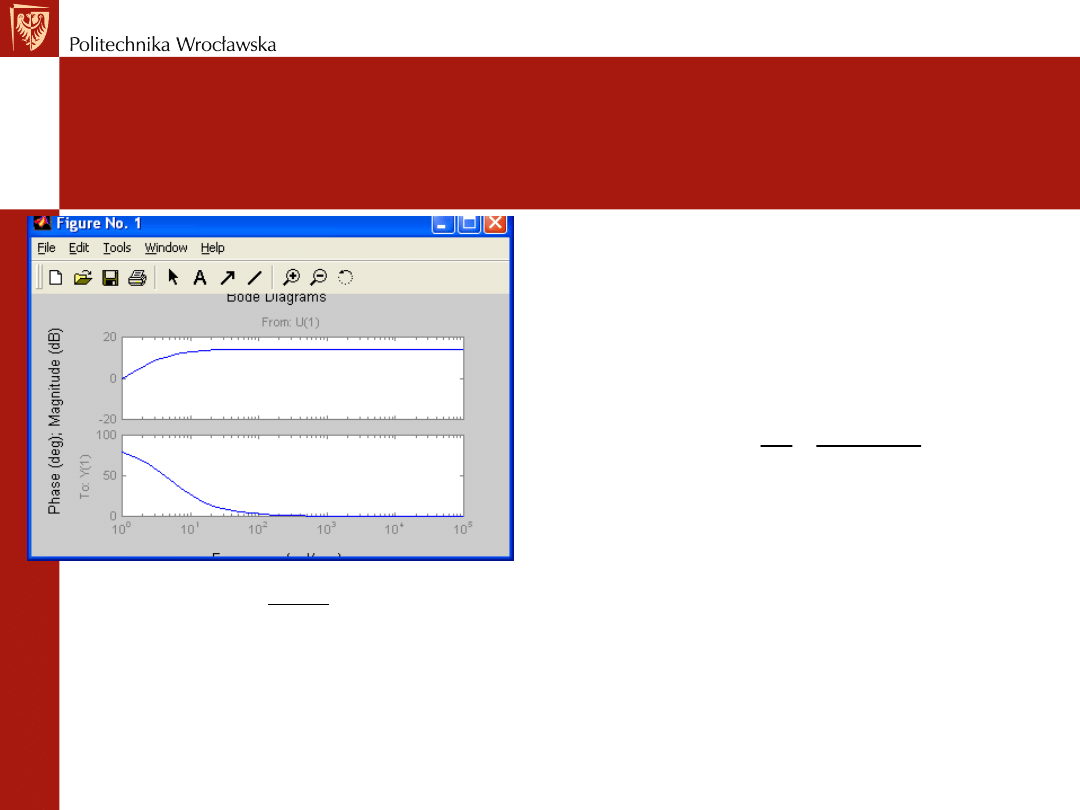
REGULATOR PID
Jak on działa? Charakterystyki
czasowe
1
( )
1
1
/
d
r
p
i
d
T s
G s
k
Ts
T s N
�
�
=
+
+
�
�
+
�
�
( )
1 0.2
s
G s
s
=
+
Wówczas dla małych pulsacji s=j człon
różniczkujący rzeczywisty zachowuje własności
członu różniczkującego idealnego, a dla dużych
wzmocnienie jest stałe i wynosi N.
Stałe wzmocnienie
przy dużych pulsacjach
Rys. Wykres Bodego dla członu różniczkującego rzeczywistego
20 log (0.2) = -13.97 dB
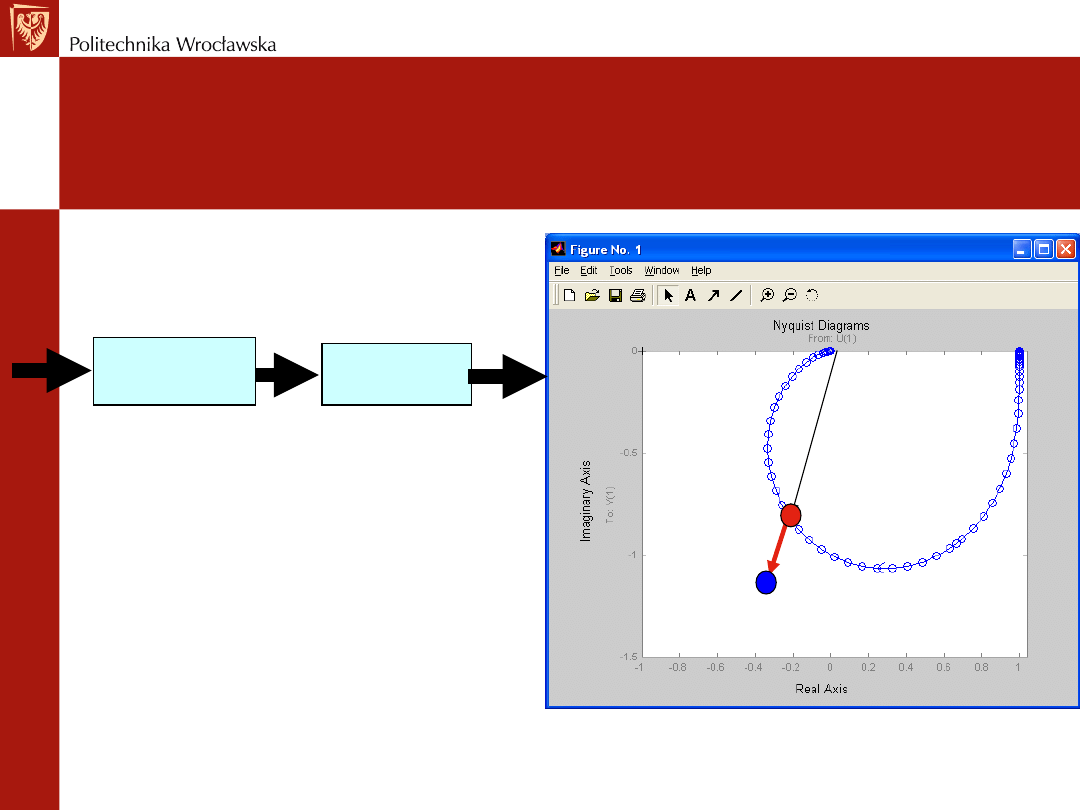
REGULATOR PID
Jak on działa? Charakterystyki
częstotliwościowe
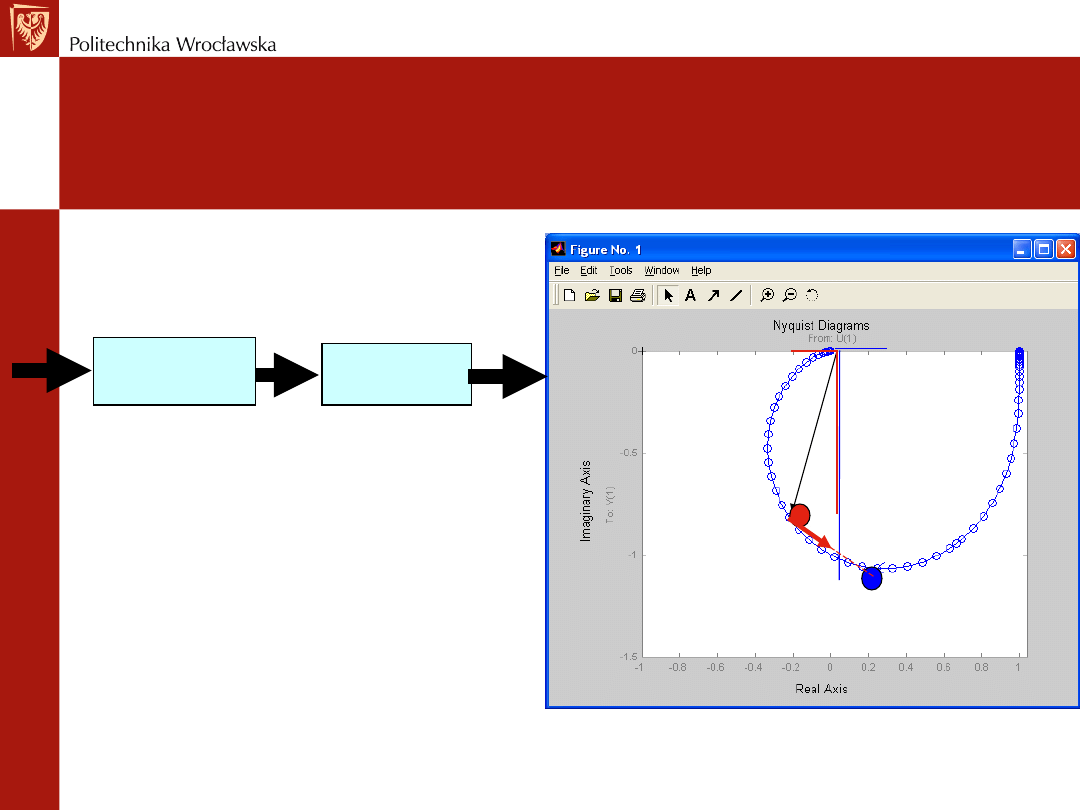
Rys. Wykres Nyquista obiektu inercyjnego 2 rzędu
Co robi regulator PID z punktem wykresu Nyquista
obiektu w otwartym układzie sterowania?
Część proporcjonalna rozszerza lub kurczy wykres
(analogia do „dmuchania w balonik”). Dlaczego?
( )
( ) ( )
( )
o
R
p o
G s
G s G s
k G s
=
=
Obiekt
Regulator
P
( )
( )
j
M
e
f w
w
W zapisie wektorowym punkt
( )
(
)
p
p
p
G s
k P jQ
k P jk Q
=
+
=
+
[P, Q] przesunął się w miejsce [k
p
P,
k
p
Q].
Oczywiście P/Q = k
p
P/k
p
Q co oznacza,
że kąt przesunięcia fazowego nie
uległ zmianie.
Zmianie natomiast uległ moduł M.
lub
P
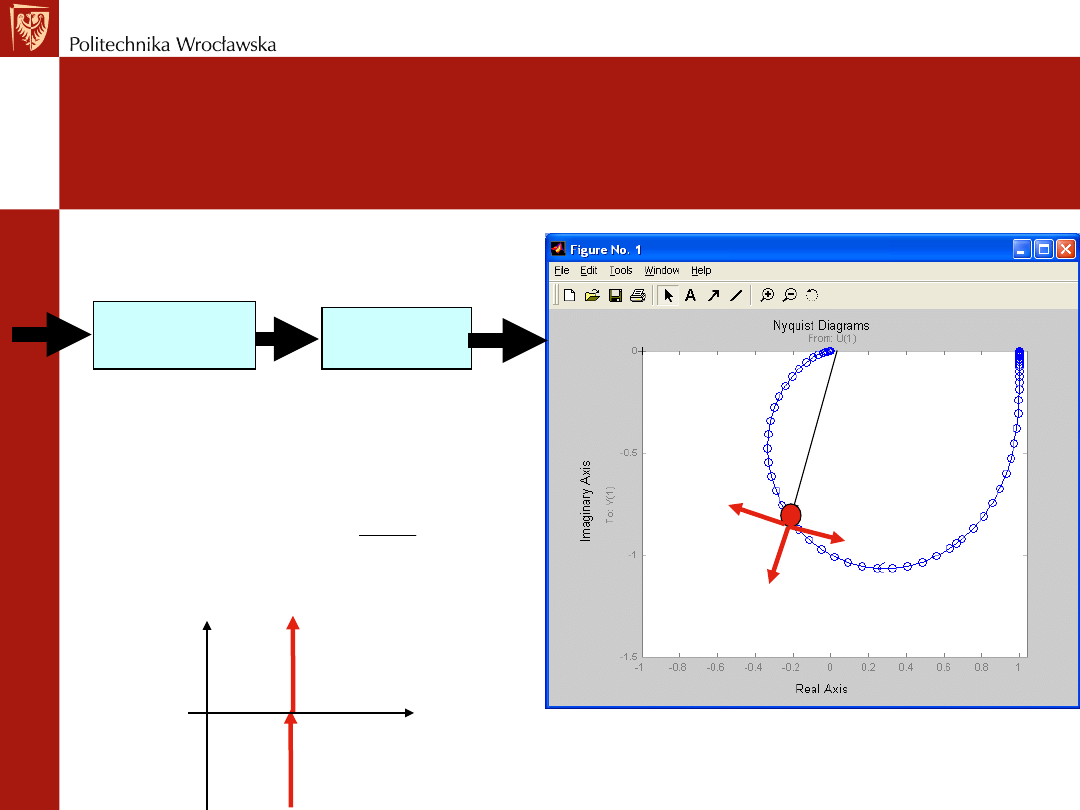
REGULATOR PID
Jak on działa? Charakterystyki
częstotliwościowe
Rys. Wykres Nyquista obiektu inercyjnego 2 rzędu
Co robi regulator PID z punktem wykresu Nyquista
obiektu w otwartym układzie sterowania?
Obiekt
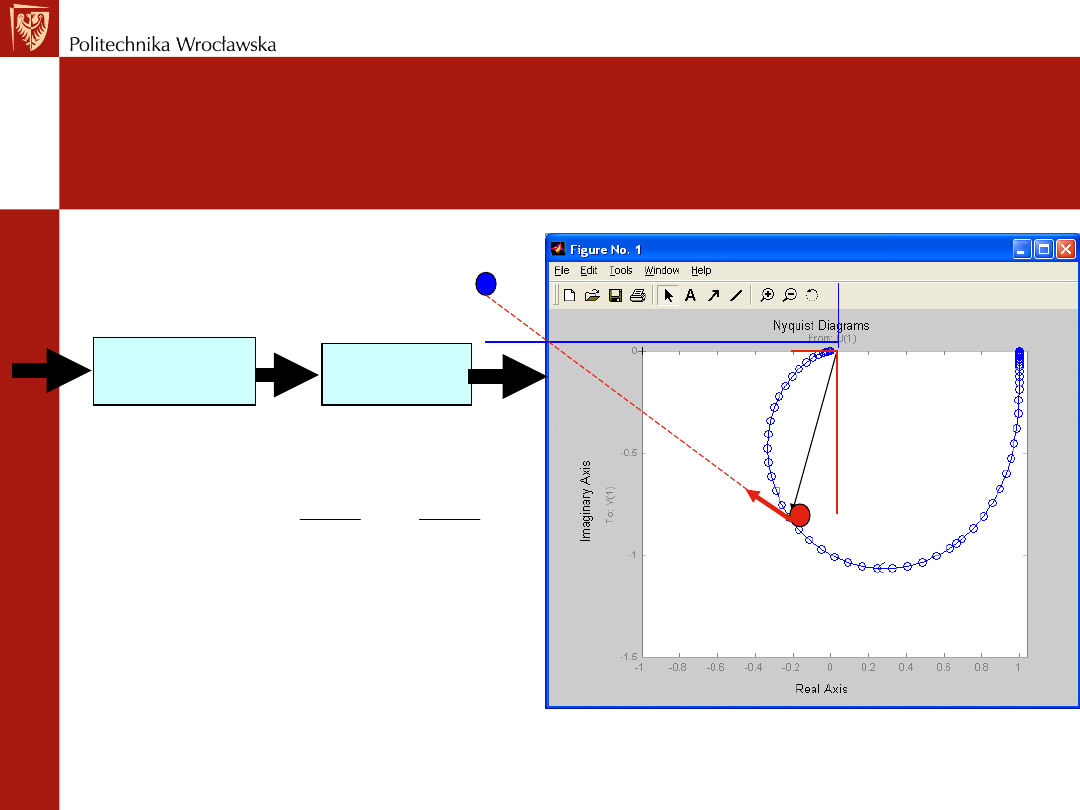
[P, Q] przesunął się w miejsce [-jP,
Q]/T
i
. Wyrażenie –jP oznacza odcinek
o długości P na dodatniej (w przypadku
punktu pokazanego na rysunku!) części
osi urojonej. Stąd można napisać [Q,
-P]/T
i
(P i Q zamieniło się miejscami).
Oznacza to zmianę przesunięcia
fazowego i modułu M.
Część całkująca przesuwa punkt o -90°
( )
( )
( )
( ) ( )
o
o
o
R
i
i
G s
G s
G s
G s G s
j
Ts
Tw
=
=
=-
I
W zapisie wektorowym punkt
Q
P
P/T
i
Q /T
i
Regulator
I
REGULATOR PID
Jak on działa? Charakterystyki
częstotliwościowe
Rys. Wykres Nyquista obiektu inercyjnego 2 rzędu
Co robi regulator PID z punktem wykresu Nyquista
obiektu w otwartym układzie sterowania?
Obiekt
[P, Q] przesunął się w miejsce [jP,
-Q]T
d
. Wyrażenie jP oznacza odcinek o
długości P na ujemnej części osi
urojonej (w przypadku punktu
pokazanego na rysunku!).
Oznacza to zmianę przesunięcia
fazowego i modułu M.
D
W zapisie wektorowym punkt
Q
P
PT
d
QT
d
Część różniczkująca przesuwa punkt o +90°
( )
( ) ( )
( )
( )
o
R
d
o
d
o
G s
G s G s
T sG s
j T G s
w
=
=
=
Regulator
D
REGULATOR PID
Jak on działa? Charakterystyki
częstotliwościowe
Rys. Wykres Nyquista obiektu inercyjnego 2 rzędu
Co robi regulator PID z punktem wykresu Nyquista
obiektu w otwartym układzie sterowania?
P
Obiekt
Regulator
PID
I
D
-j
+j
0
Uzasadnienie dla zaawansowanych
Człon różniczkujący wnosi przesunięcie fazowe
o +90° wstecz pomiędzy sygnałami wejściowym u(t) i
wyjściowym y(t). Jeżeli
( ) sin( )
u t
t
w
=
( )
( )
cos( )
du t
y t
t
dt
w
=
=
Innym uzasadnieniem jest wykres Nyquista członów
to
P
I
D
+90
o
-90
o
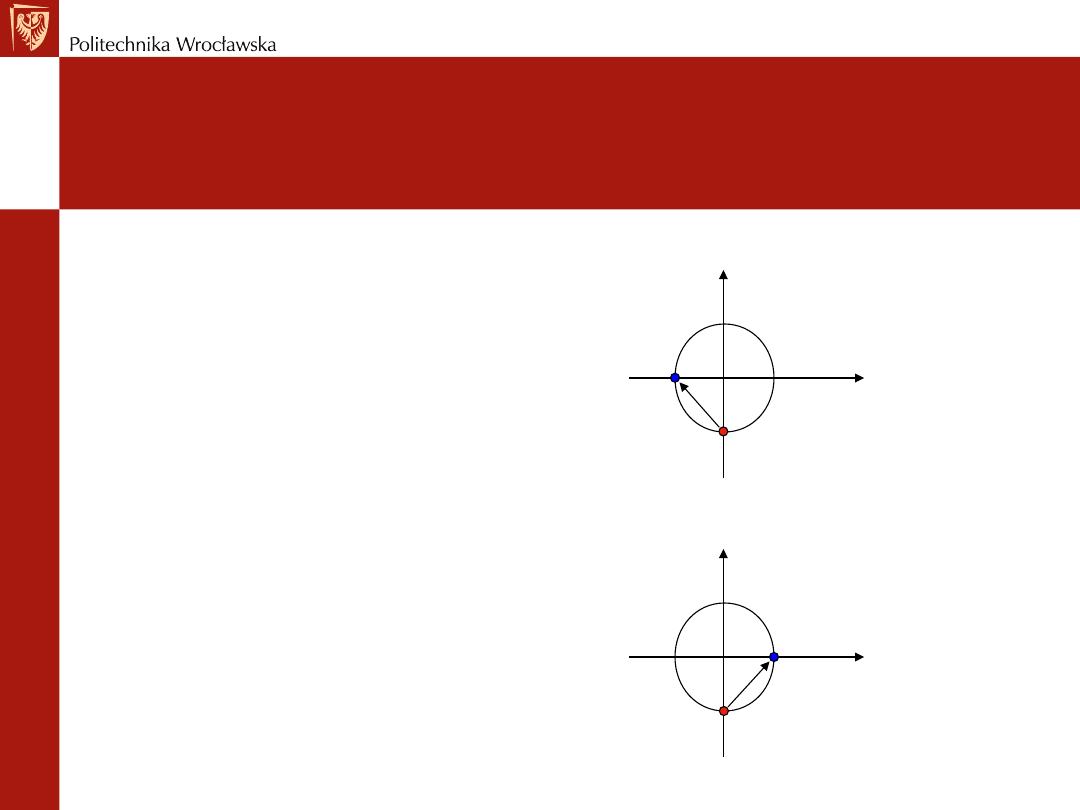
90
o
j
e
-
Człon całkujący wnosi przesunięcie fazowe
,więc punkt musi się przesunąć o 90
o
w lewo
po okręgu.
(Dlaczego po okręgu ? Bo wzór Eulera oznacza parametryczne równanie okręgu)
(Dlaczego w lewo? Bo taka jest konwencja określania
kierunku ruchu po okręgu – w lewo jest znak minus)
Człon różniczkujący wnosi przesunięcie fazowe
,więc punkt musi się przesunąć o 90
o
w prawo
po okręgu.
90
o
j
e
+
Inne uzasadnienie
REGULATOR PID
Jak on działa? Charakterystyki
częstotliwościowe
P=Re G(j)
Q=Im G(j)
P=Re G(j)
Q=Im G(j)
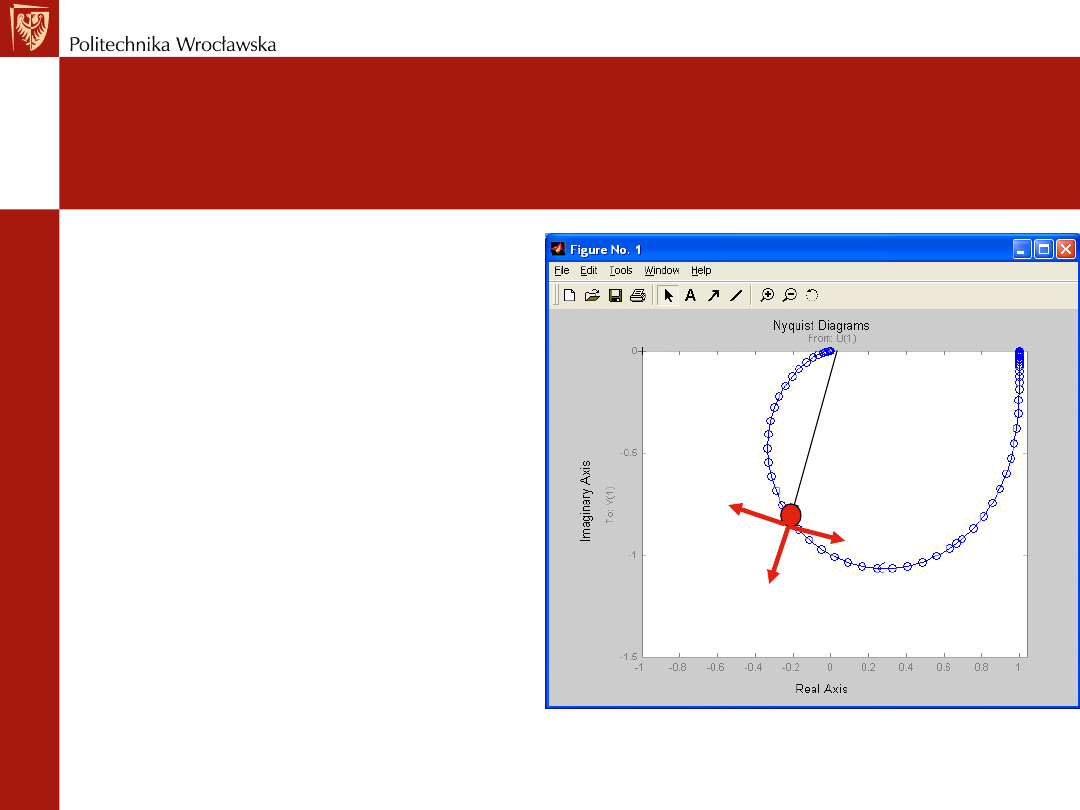
REGULATOR PID
Jak on działa? Charakterystyki
częstotliwościowe
Rys. Wykres Nyquista obiektu inercyjnego 2 rzędu
P
I
D
Z rysunku wynika, że regulator PID może przesunąć
punkt wykresu Nyquista obiektu w dowolne miejsce
płaszczyzny w zależności od nastaw
Ale które miejsce jest dobre?

Systematyczna klasyfikacja
własności regulatorów
TYPOWE STRUKTURY
REGULATORÓW PID
Regulator proporcjonalny P
TYPOWE STRUKTURY
REGULATORÓW PID
Regulator całkujący I
TYPOWE STRUKTURY
REGULATORÓW PID
Regulator różniczkujący D
TYPOWE STRUKTURY
REGULATORÓW PID
Regulator proporcjonalno-całkujący
PI
TYPOWE STRUKTURY
REGULATORÓW PID
Regulator proporcjonalno-różniczkujący
PD
TYPOWE STRUKTURY
REGULATORÓW PID
Regulator proporcjonalno-różniczkujący
PD
TYPOWE STRUKTURY
REGULATORÓW PID
Regulator PID
TYPOWE STRUKTURY
REGULATORÓW PID
Regulator PID

Próba strojenia regulatora
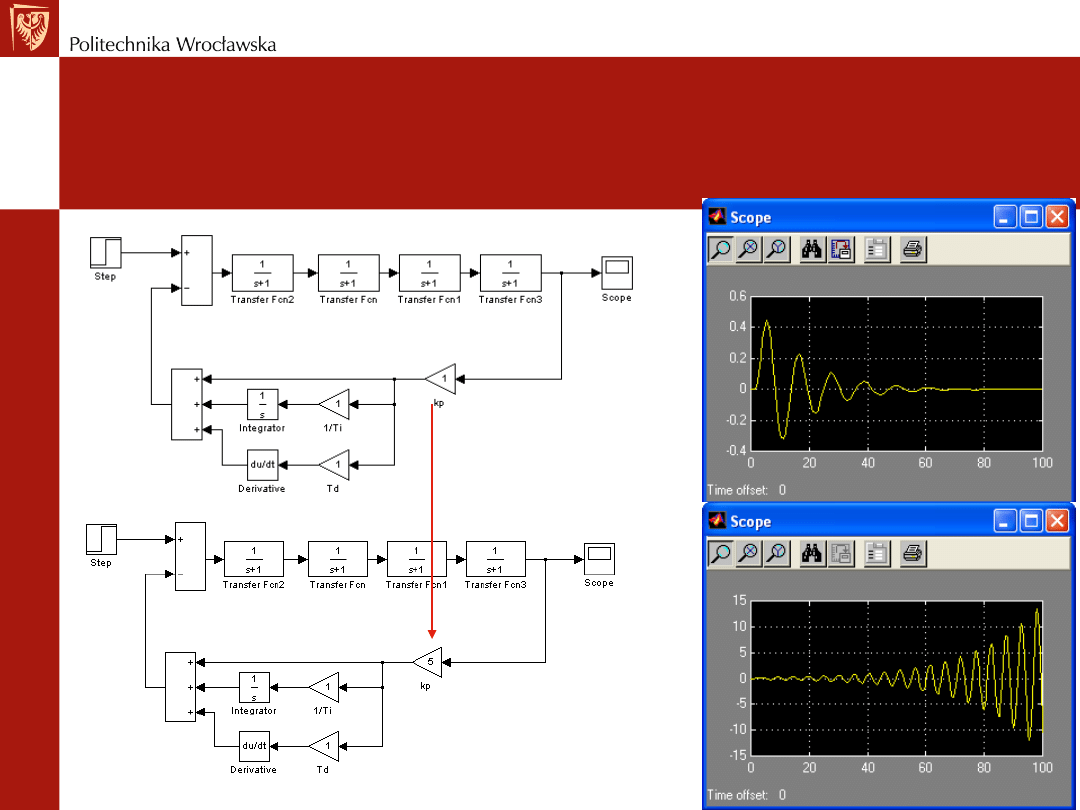
PRÓBA STROJENIA REGULATORA
Wpływ nastaw na przebieg przejściowy -
k
p
Przebieg stabilny
Przebieg niestabilny
k
p
=1, T
i
=1, T
d
=1
k
p
=5, T
i
=1, T
d
=1
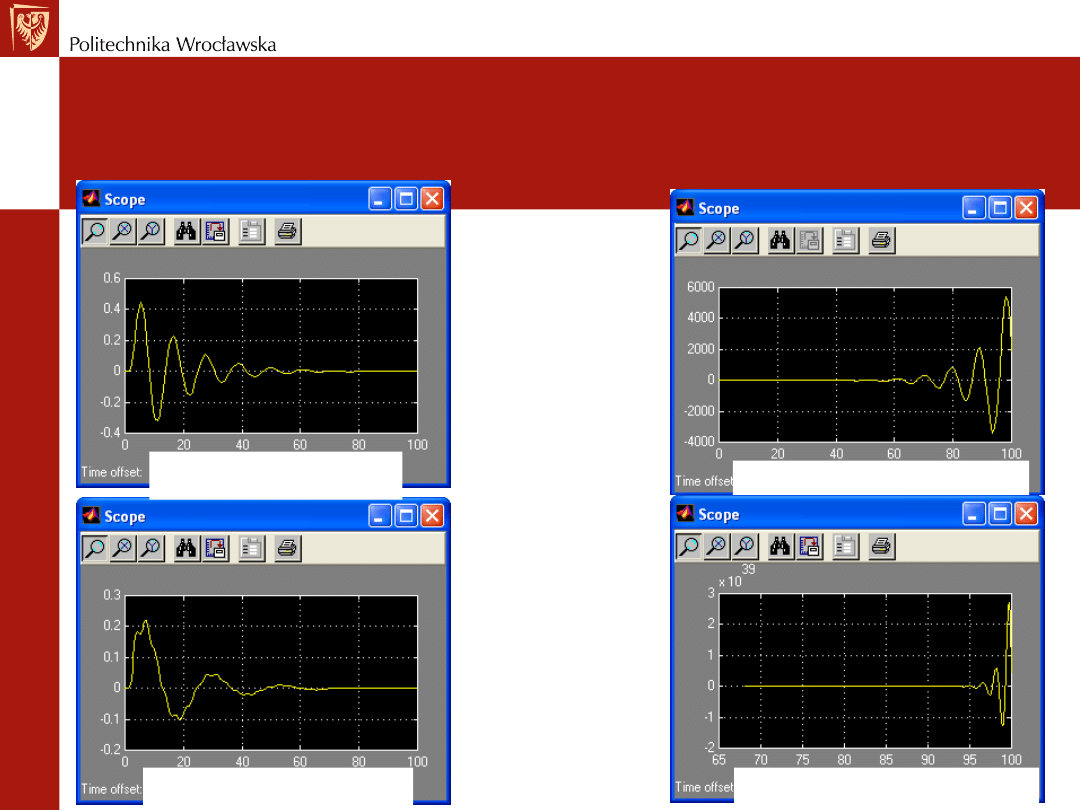
PRÓBA STROJENIA REGULATORA
Wpływ nastaw na przebieg przejściowy –
T
i,
T
d
kp=1, Ti=0.5, Td=1
k
p
=1, T
i
=1, T
d
=10
kp=1, Ti=1, Td=100
k
p
=1, T
i
=1, T
d
=1
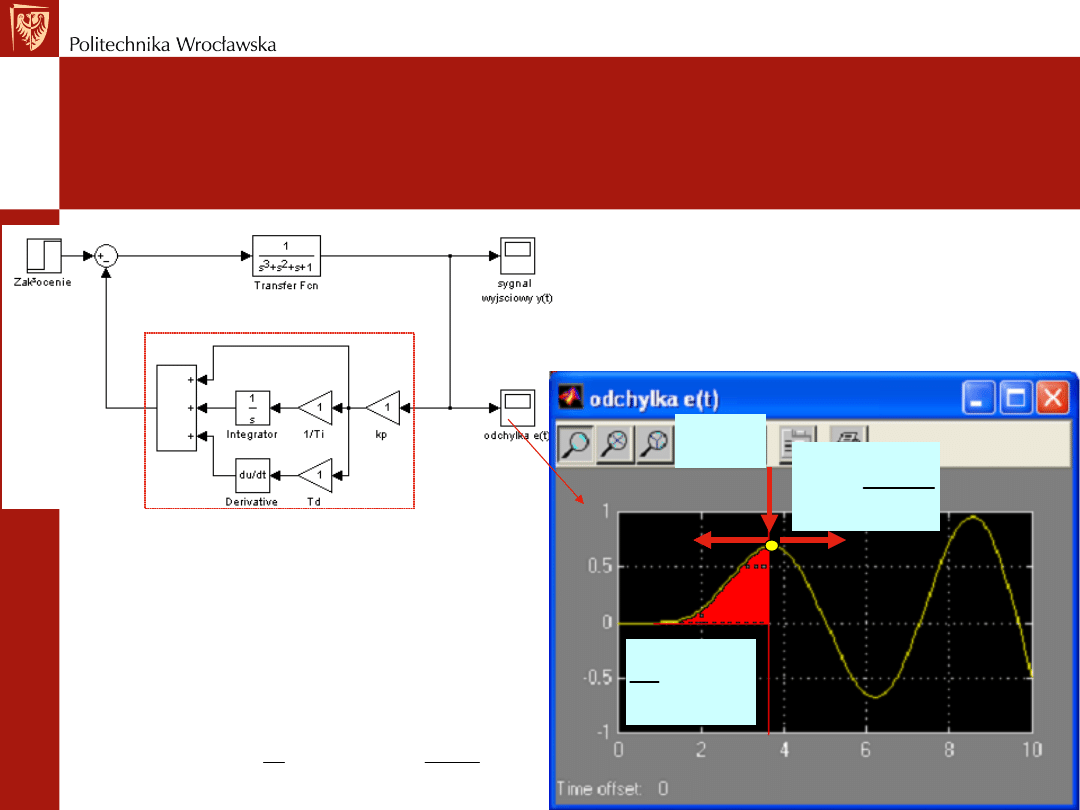
STROJENIE PID
Wpływ nastaw na przebieg
przejściowy
u t
k e t
T
e d
T
de t
dt
p
i
t
d
( )
( )
( )
( )
1
0
Sygnał
u(t)
Stabilność
układu
regulacji
k
p
wzrasta
Wzrasta
Maleje
T
i
wzrasta
Maleje
Wzrasta
T
d
wzrasta
Wzrasta
Początkowo
wzrasta potem
maleje

Dziękuję za uwagę i
zainteresowanie
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
Wyszukiwarka
Podobne podstrony:
automaty PID, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, automaty
Ćw.2.Cyfrowy regulator PID, Elektrotechnika - notatki, sprawozdania, podstawy automatyki i regulacji
Podstawy Automatyki Lab 10 CW6 ?danie regulatora PID
REG PID 27-01.DOC, Laboratorium Podstaw Automatyki
Sprawozdanie pid do wydruku!!!!!!!!!!!!!!!!!KASIAK, Dokumenty Inżynierskie, Podstawy automatyki 3
FESTO Podstawy automatyzacji
12 Podstawy automatyki Układy sterowania logicznego
podstawy automatyki ćwiczenia lista nr 4b
Podstawy automatyki cz1
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy au
Podstawy automatyki 2
podstawy automatyki
Podstawy automatyki (w 5) elementy wykonawcze i pomiarowe ppt [tryb zgodnosci]
podstawy automatyki ćwiczenia lista nr 4c
Profilowanie konopii na podstawie składu pierwiastkowego Część I efekty matrycowe
podstawy automatyki ćwiczenia lista nr 5b
Konspekt wykładów z Podstaw automatyki wykład 5
więcej podobnych podstron