
OSCYLATOR HARMONICZNY
•Drgania swobodne oscylatora harmonicznego
•Energia potencjalna sprężystości
•Drgania tłumione oscylatora harmonicznego
•Drgania wymuszone oscylatora harmonicznego
•Rezonans amplitudowy
•Rezonans mocy
•Dobroć układu drgającego
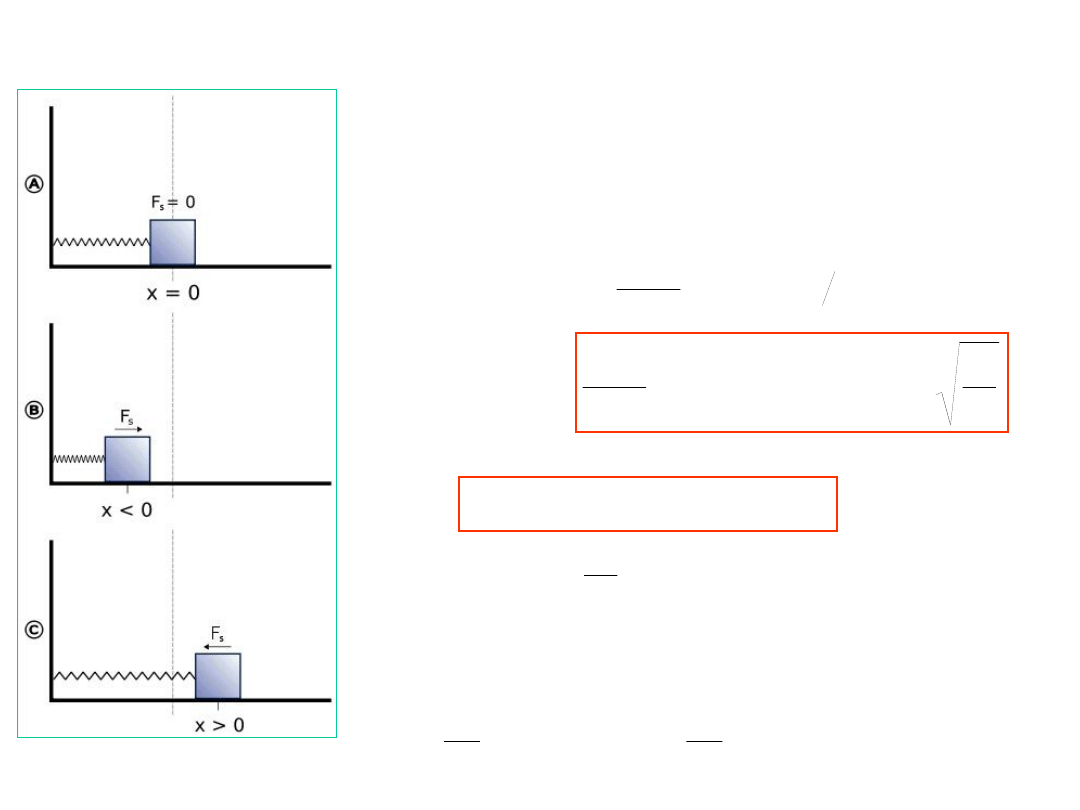
DRGANIA SWOBODNE OSCYLATORA HARMONICZNEGO
Prawo Hooke’a
kx
x
F
)
(
m - masa,
k - stała sprężystości sprężyny
Równanie ruchu
m
k
x
dt
x
d
m
kx
dt
x
d
m
kx
x
F
ma
0
2
0
2
2
2
2
,
0
:
)
(
Rozwiązanie ogólne zależy od dwóch stałych A, B
)
sin(
)
(
0
,
)
0
(
,
0
)
0
(
Niech
0
0
0
0
0
0
t
v
t
x
B
v
A
v
v
x
Stałe wyznacza się z dwóch warunków początkowych
)
sin(
)
cos(
)
(
)
cos(
)
sin(
)
(
0
0
0
0
0
t
B
t
A
dt
dx
t
v
t
B
t
A
t
x
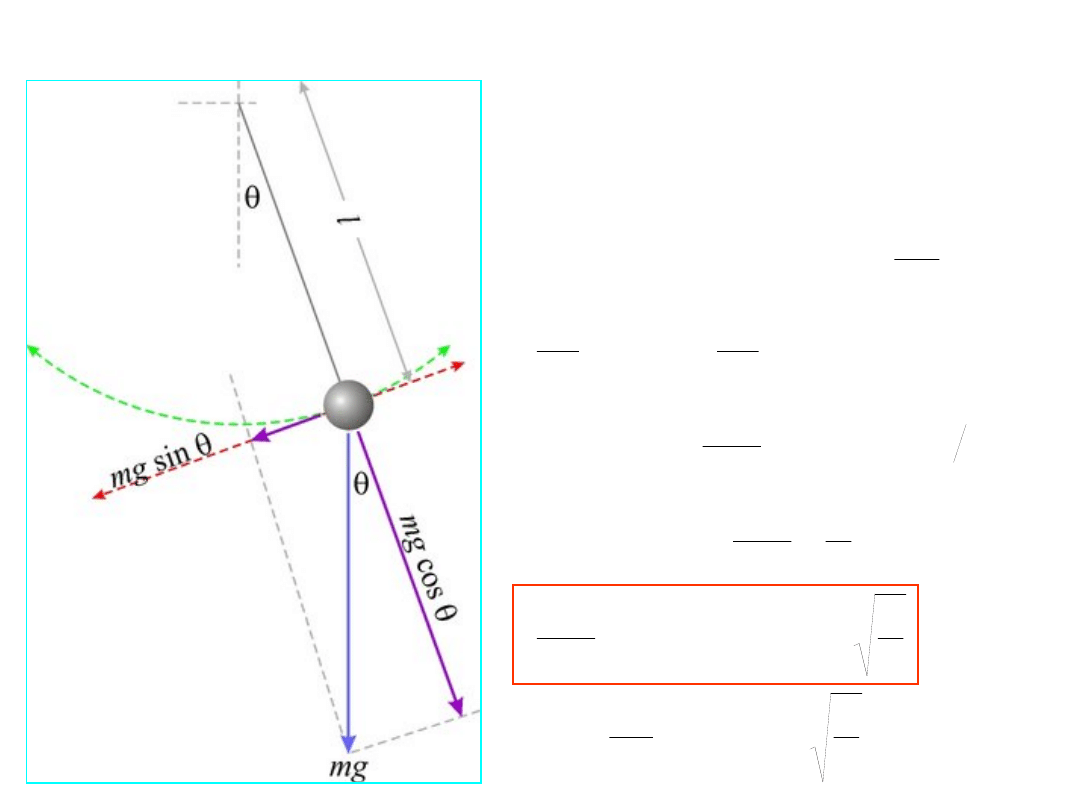
Przykład: wahadło matematyczne
g
l
T
T
l
g
dt
d
l
g
dt
d
ml
lmg
dt
d
ml
lmg
dt
dL
M
dt
L
d
dt
d
ml
ml
L
l
v
v
m
l
p
l
L
lmg
M
P
l
M
g
m
P
P
P
P
2
2
,
0
0
sin
:
sin
sin
sin
,
0
0
0
0
2
0
2
2
2
2
0
2
2
2
2
2
2
ENERGIA POTENCJALNA SPRĘŻYSTOŚCI
)
cos(
)
(
),
sin(
)
(
)
0
(
,
0
)
0
(
Niech
0
0
0
0
0
0
t
v
t
v
t
v
t
x
v
v
x
Energia kinetyczna
Maksymalna wartosć energii kinetycznej odpowiada sytuacji, gdy oscylator
przechodzi przez położenie równowagi x=0. Wówczas energia potencjalna
E
p
=0.
Gdy wychylenie oscylatora jest maksymalne, x=v
0
/
0
, energia kinetyczna
E
k
=0 (v=0)
i całkowita energia jest zmagazynowana w postaci energii potencjalnej.
t
mv
mv
t
E
E
k
k
0
2
2
0
2
cos
2
1
2
2
0
0
2
0
2
0
max
,
2
1
2
1
v
m
mv
E
k
Kwadrat maksymalnego wychylenia
(amplitudy drgań)
Stąd energia potencjalna
const
mv
E
E
t
mv
t
E
E
kx
x
m
t
E
E
k
p
p
p
p
p
2
0
0
2
2
0
2
2
2
0
2
1
sin
2
1
2
1
2
1
Zauważmy że
dx
dE
kx
F
p
DRGANIA TŁUMIONE OSCYLATORA HARMONICZNEGO
Siła tłumiąca
dt
dx
v
F
t
Równanie ruchu
m
k
m
x
dt
dx
dt
x
d
m
v
kx
dt
x
d
m
0
2
0
2
2
2
2
,
2
,
0
2
:
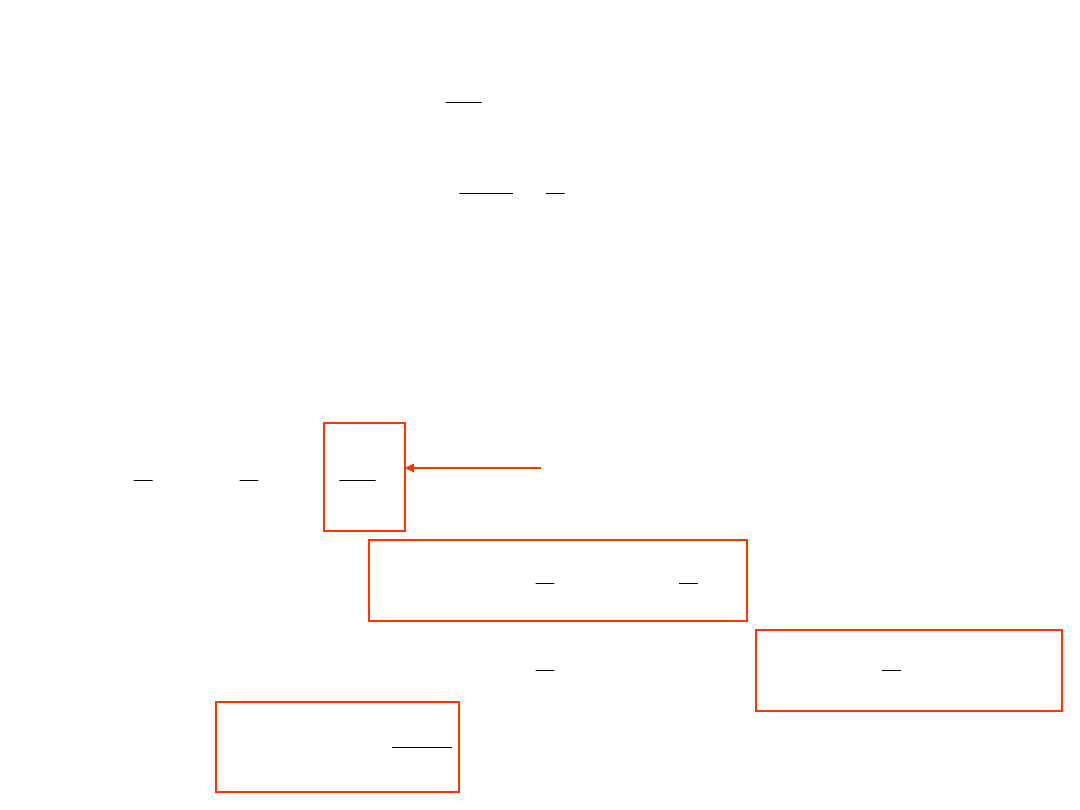
Przypadek słabego tłumienia
0
Drgania wokół położenia równowagi o malejącej wykładniczo
amplitudzie, z
częstoscią mniejszą od częstości drgań własnych
0
Przypadek silnego tłumienia
0
Wykładniczy powrót do położenia równowagi, brak drgań
Tłumienie krytyczne
0
Wolniejszy niż wykładniczy powrót do położenia równowagi, brak drgań.
Można pokazać, że rowziązanie ma postać (A, B - stałe wzynaczane z
warunków początkowych)
)
exp(
)
(
)
(
t
Bt
A
t
x
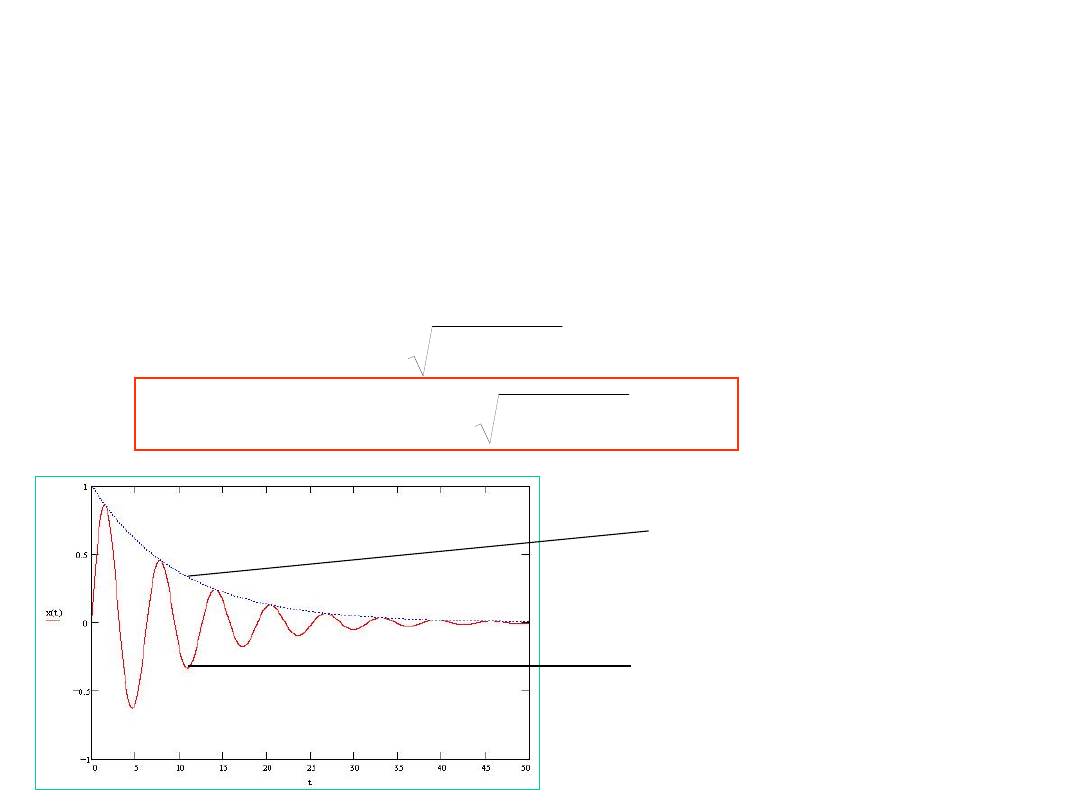
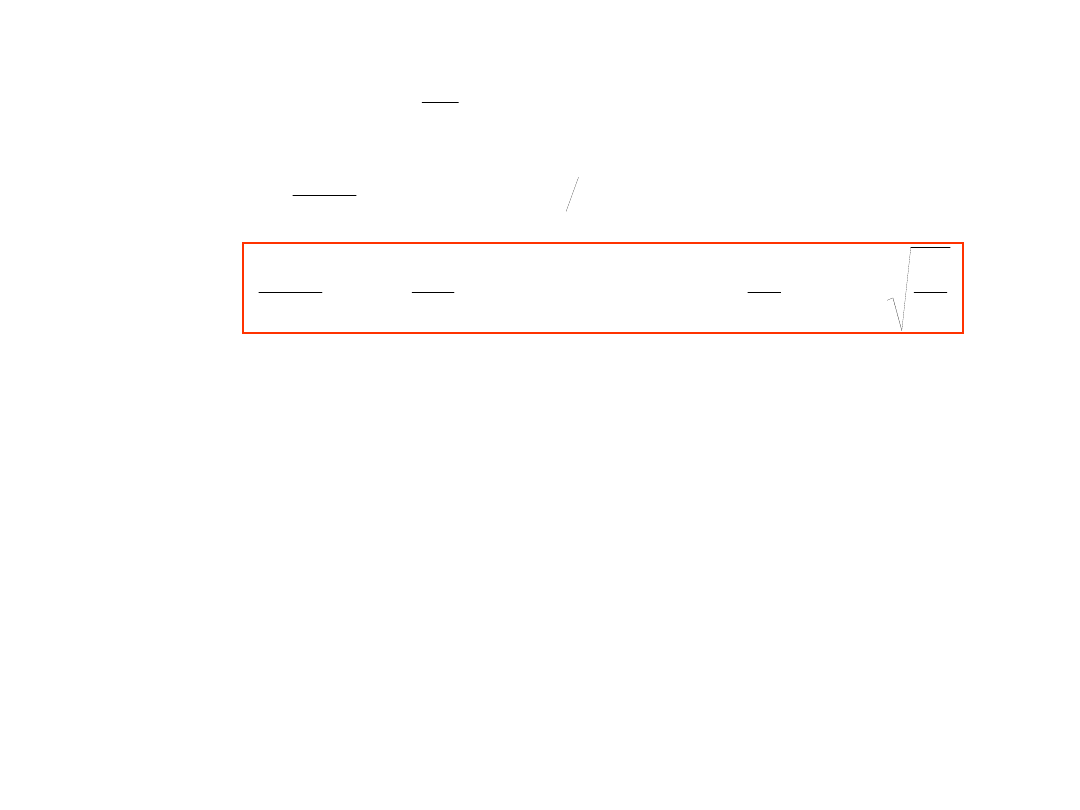
Przypadek słabego tłumienia
Rozwiązania poszukujemy w postaci (A,φ - stałe zal. od warunków początkowych)
t
t
A
t
x
r
sin
exp
)
(
Wstawiając do równania i grupując wyrazy przy funkcjach sin, cos otrzymujemy
t
t
A
t
x
t
t
A
t
t
A
r
r
r
r
r
r
2
2
0
0
2
2
0
2
0
2
2
sin
)
exp(
)
(
,
0
cos
exp
2
2
sin
exp
2
obwiednia
drgania tłumione
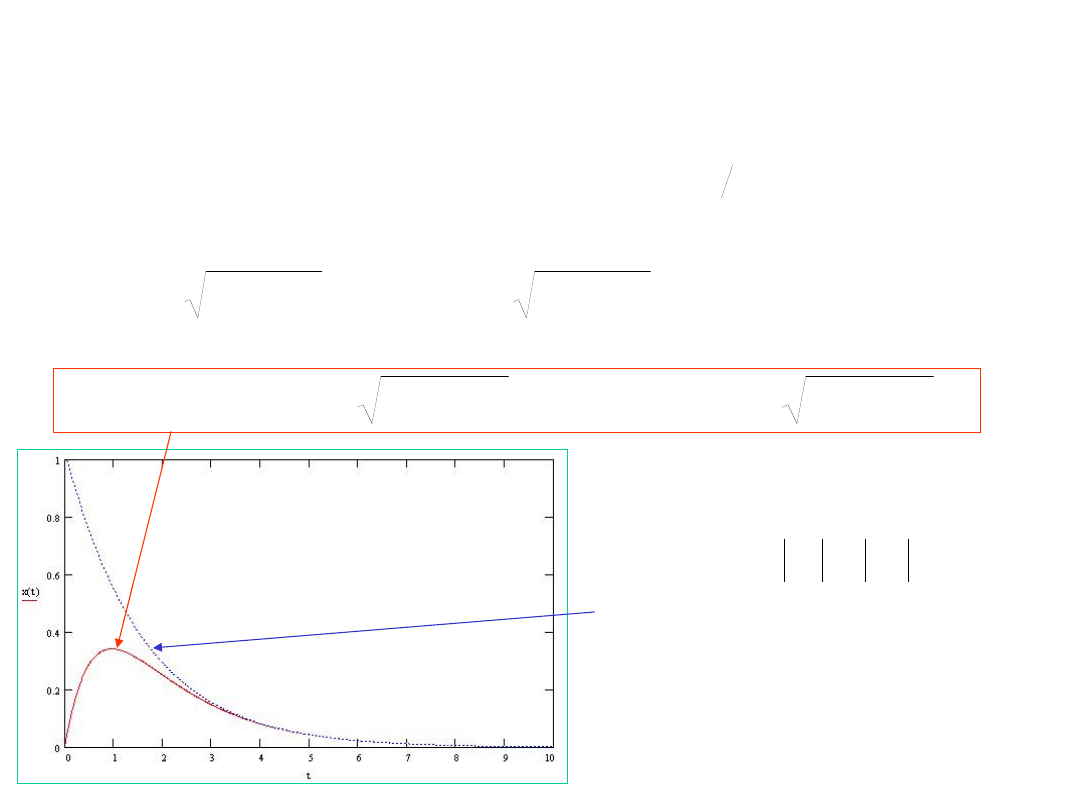
Przypadek silnego tłumienia
Rozwiązania poszukujemy w postaci
t
A
t
x
exp
)
(
Wstawiając postulowaną postać rozwiązania do równania, otrzymujemy równanie na
2
0
2
2
2
0
2
1
2
0
2
2
0
2
,
0
2
exp
:
0
exp
exp
2
exp
t
A
t
A
t
A
t
A
Rozwiązanie ogólne ma postać kombinacji liniowej rozwiązań
z
1
,
2
t
B
t
A
t
x
2
0
2
2
0
2
exp
exp
)
(
A, B - stałe wzynaczane z
warunków początkowych
t
A
t
x
t
1
2
1
1
2
exp
)
(
,
0
DRGANIA WYMUSZONE OSCYLATORA HARMONICZNEGO
Siła wymuszająca
t
F
t
F
zewn
sin
)
(
0
Równanie ruchu
m
F
f
m
k
m
t
f
x
dt
dx
dt
x
d
m
t
F
v
kx
dt
x
d
m
0
0
0
0
2
0
2
2
0
2
2
,
,
2
,
sin
2
:
sin
Stan ustalony oscylatora z wymuszeniem (rozwiązanie dla t
)
Rozwiązania poszukujemy w postaci
t
A
t
x
sin
)
(
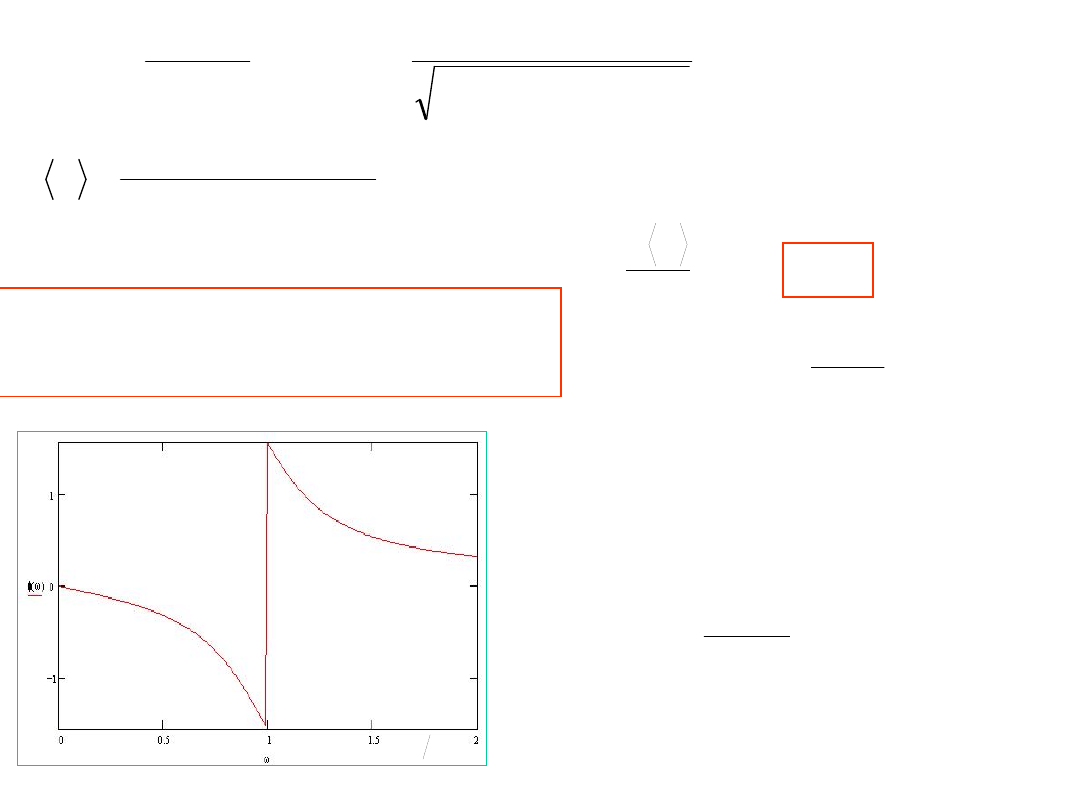
Rozwiązanie ma postać drgań o częstości równej częstosci siły wymuszającej,
amplitudzie A, przesunietych w fazie o
względem siły wymuszającej.
Rozwiązanie nie zawiera zależności od warunków początkowych (w szczególności
A,
nie zależą od warunków początkowych, tylko od parametrów oscylatora).
Dla małych t w układzie występują drgania nieustalone, których postać zależy od
warunków początkowych. Amplituda drgań nieustalonych maleje wykładniczo z
czasem i przy t
pozostają tylko drgania ustalone, niezależne od warunków
początkowych.
Wstawiając postulowaną postać rozwiązania do równania, otrzymujemy
t
f
t
A
t
A
sin
cos
2
sin
0
2
2
0
Korzystając ze wzorów na sin(
+), cos(+) otrzymujemy
t
f
t
A
t
A
f
sin
cos
cos
2
sin
sin
sin
2
cos
0
0
2
2
0
2
2
0
0
2
0
2
2
2
2
2
0
0
2
2
2
2
0
0
2
2
0
2
ar
sin
2
)
(
2
)
(
2
cos
sin
ctg
t
f
t
x
f
A
A
tg
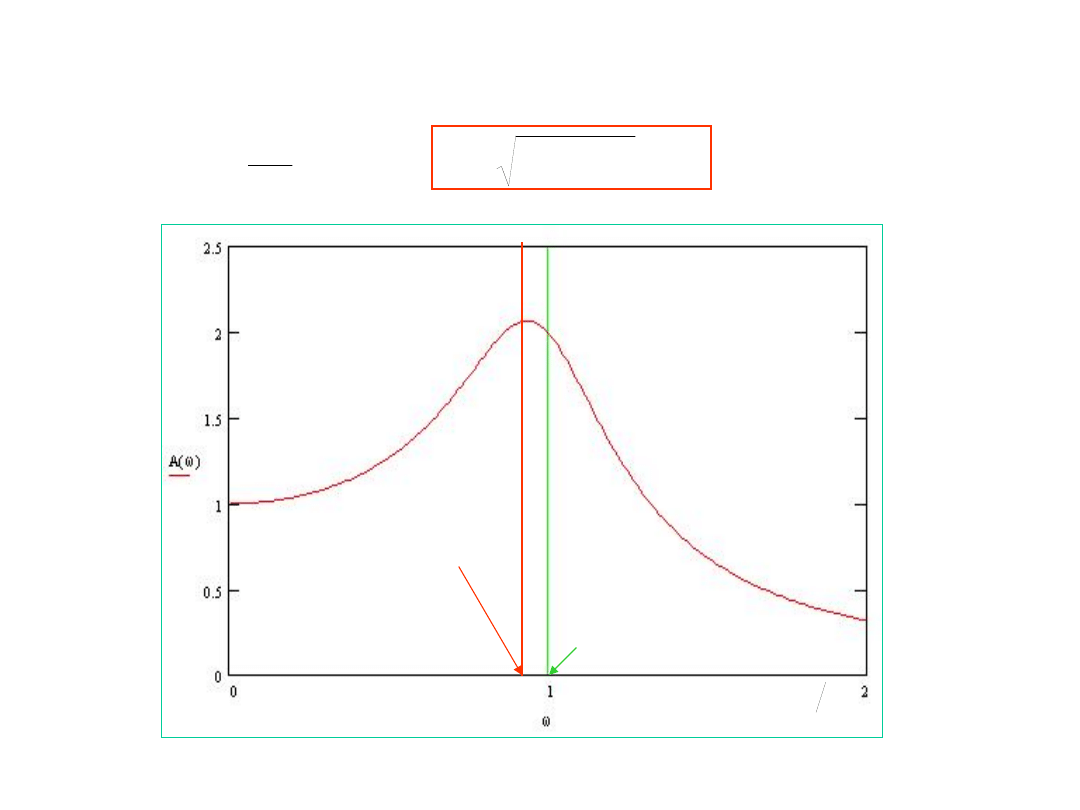
REZONANS AMPLITUDOWY
0
A
Amplituda drgań ustalonych jest maksymalna, gdy
0
2
2
0
2
0
d
dA
Rezonans
amplitudowy
Rezonans
mocy
REZONANS MOCY
Moc absorbowana (chwilowa)
t
A
t
F
t
v
t
F
P
zewn
cos
sin
0
Niech <y(t) > oznacza średnią wartość wielkości y w ciągu jednego okresu T=2
/
siły wymuszającej
sin
2
1
sin
sin
cos
sin
cos
cos
sin
sin
sin
cos
cos
cos
0
...
3
sin
2
sin
sin
2
1
cos
sin
cos
sin
1
cos
sin
1
cos
sin
0
2
1
2
0
2
sin
2
1
0
0
2
2
2
2
2
2
2
2
A
F
t
t
t
A
F
t
t
A
F
P
t
t
t
t
t
t
t
t
t
t
t
t
t
t
t
2
2
2
2
2
2
0
2
0
2
2
2
2
2
0
2
2
0
2
2
2
sin
2
A
m
f
m
P
tg
Moc absorbowana jest maksymalna, gdy
0
5
.
0
5
.
0
Dla częstości rezonansowej drgania ustalone
są przesunięte w fazie o
/2 (czyli o 1/4 okresu)
względem siły wymuszającej. Jest to
maksymalne możliwe przesuniecie w fazie.
t
f
t
x
cos
2
)
(
0
0
0
0
0
0
2
0
f
A
A
d
P
d
rez
W stanie ustalonym (drgania o stałej
amplitudzie) moc absorbowana = mocy
traconej na pracę przeciw sile tłumiącej
DOBROĆ UKŁADU DRGAJĄCEGO
2
2
2
0
2
2
2
2
2
2
2
2
2
2
2
0
2
2
2
0
2
2
2
0
2
2
0
4
1
4
1
cos
2
1
cos
2
1
2
1
4
1
sin
2
1
sin
2
1
2
1
A
m
E
E
E
A
m
t
A
m
E
t
A
m
mv
E
A
m
t
A
m
E
t
A
m
x
m
E
k
p
k
k
p
p
Średnia energia zmagazynowana w układzie
Dobroć układu drgającego: stosunek energii zgromadzonej w układzie do energii
traconej w ciągu jednego okresu na pokonanie siły tłumienia (w stanie ustalonym
równej energii dostarczanej przez siłę zewnętrzną) przy częstości pobudzenia równej
częstości rezonansowej.
Im więcej energii można zmagazynować w stosunku do mocy strat, tym lepszy układ.
2
2
0
0
T
P
E
Q
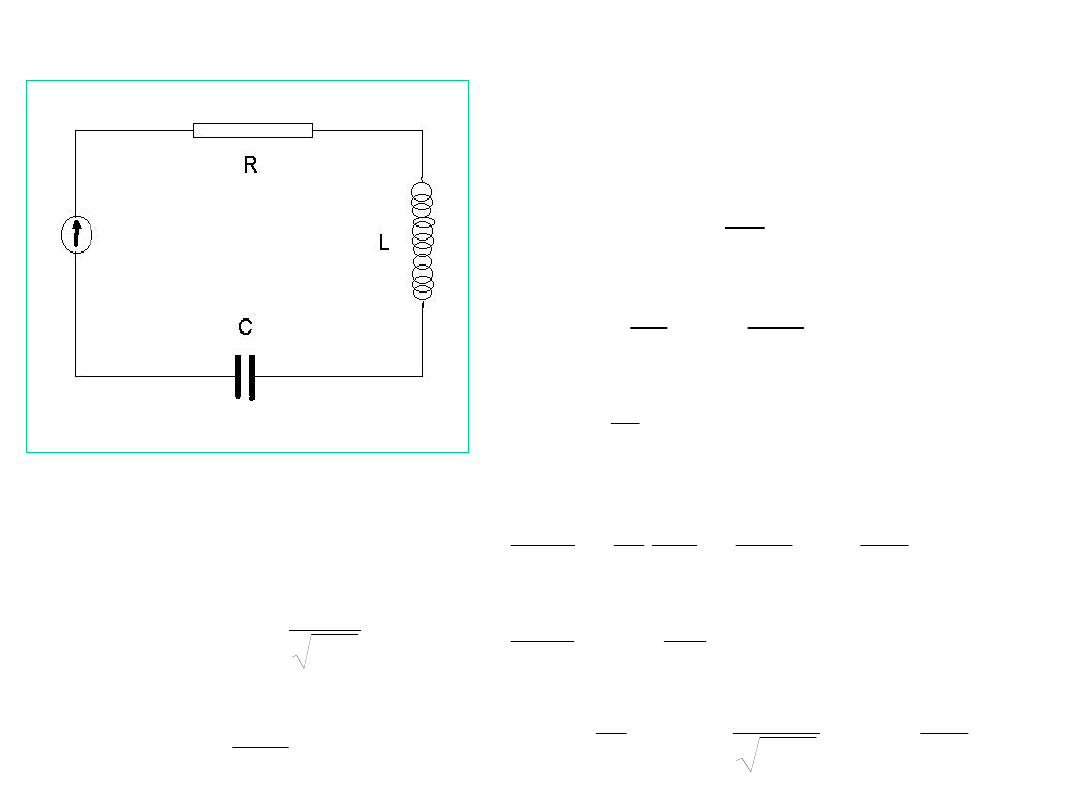
Przykład: drgania w obwodzie RLC z wymuszeniem
t
U
t
U
sin
)
(
0
L
U
f
LC
L
R
t
f
x
dt
dx
dt
x
d
t
L
U
q
LC
dt
dq
L
R
dt
q
d
0
0
0
0
2
0
2
2
0
2
2
,
1
,
2
,
sin
2
,
sin
1
II prawo Kirchhoffa
C
q
U
dt
q
d
L
dt
dI
L
U
dt
dq
R
RI
U
U
U
U
t
U
C
L
R
C
L
R
2
2
0
)
(
I - natężenie prądu,
q - ładunek na kondensatorze
Częstość drgań własnych
obwodu RLC
LC
1
0
Dobroć
R
L
Q
0
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
Wyszukiwarka
Podobne podstrony:
osc harm
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
Zaburzenia nerwicowe wyklad
Szkol Wykład do Or
Strategie marketingowe prezentacje wykład
Wykład 6 2009 Użytkowanie obiektu
wyklad2
wykład 3
więcej podobnych podstron