
WYKŁAD 7
Serwonapędy
z silnikami indukcyjnymi
–
sterowanie wektorowe
przy stabilizacji
strumienia silnika
2
Dla maszyny indukcyjnej trójfazowej, przyjmuje się
następujące założenia upraszczające:
– rozłożone przestrzennie uzwojenia stojana i klatka wirnika
zostają zastąpione uzwojeniem skupionym
(koncentrycznym),
– rozpatrywany jest silnik trójfazowy symetryczny,
– zakłada się równomierność szczeliny powietrznej,
– pomija się wpływ anizotropii, nasycenie magnetycznego,
zjawiska histerezy oraz prądów wirowych,
– pomija się wyższe harmoniczne przestrzennego rozkładu
pola w szczelinie powietrznej, uwzględniając tylko
harmoniczną podstawową,
– rezystancje i reaktancje uzwojeń uważa się za stałe.
1
s
Ψ
Model matematyczny SI
3
Przy tych założeniach uzyskuje się model obwodowy,
któremu odpowiada schemat:
Schemat ten stanowi podstawę do sformułowania modelu
matematycznego opisanego równaniami różniczkowymi
zwyczajnymi, o stałych parametrach.
1
s
Ψ
Model matematyczny SI

4
• Model ten składa się z siedmiu równań różniczkowych i
siedmiu równań algebraicznych.
• Rozwiązanie otrzymanego układu równań różniczkowych
jest pracochłonne.
• Jest to układ wysokiego rzędu, zawierający równania
nieliniowe o okresowo zmiennych współczynnikach.
• Parametry silnika, występujące w tym modelu
matematycznym, są trudno identyfikowalne.
• Wobec tego układ równań trójfazowej maszyny
indukcyjnej, przedstawiony za pomocą prądów fazowych i
strumieni skojarzonych przekształca się w sposób
umożliwiający otrzymanie układu równań o stałych
współczynnikach.
• W tym celu należy dokonać odpowiedniej transformacji
zmiennych. W chwili obecnej powszechnie jest stosowana
transformacja oparta na koncepcji wektora
przestrzennego, wprowadzonego przez Kovačsa i Racza
w połowie ubiegłego wieku.
1
s
Ψ
Model matematyczny SI we współrzędnych
fazowych
5
Jeżeli dowolne wielkości fazowe w układzie
współrzędnych naturalnych dotyczą przebiegów
symetrycznych,
czyli spełniają warunek:
to wektor przestrzenny k definiowany jest
następująco:
gdzie:
1
s
Ψ
Model matematyczny SI
0
t
k
t
k
t
k
C
B
A
t
k
t
k
t
k
C
B
A
2
3
2
a
a
1
k
2
3
2
1
3
2
j
e
j
a
2
3
2
1
3
4
2
j
e
j
a
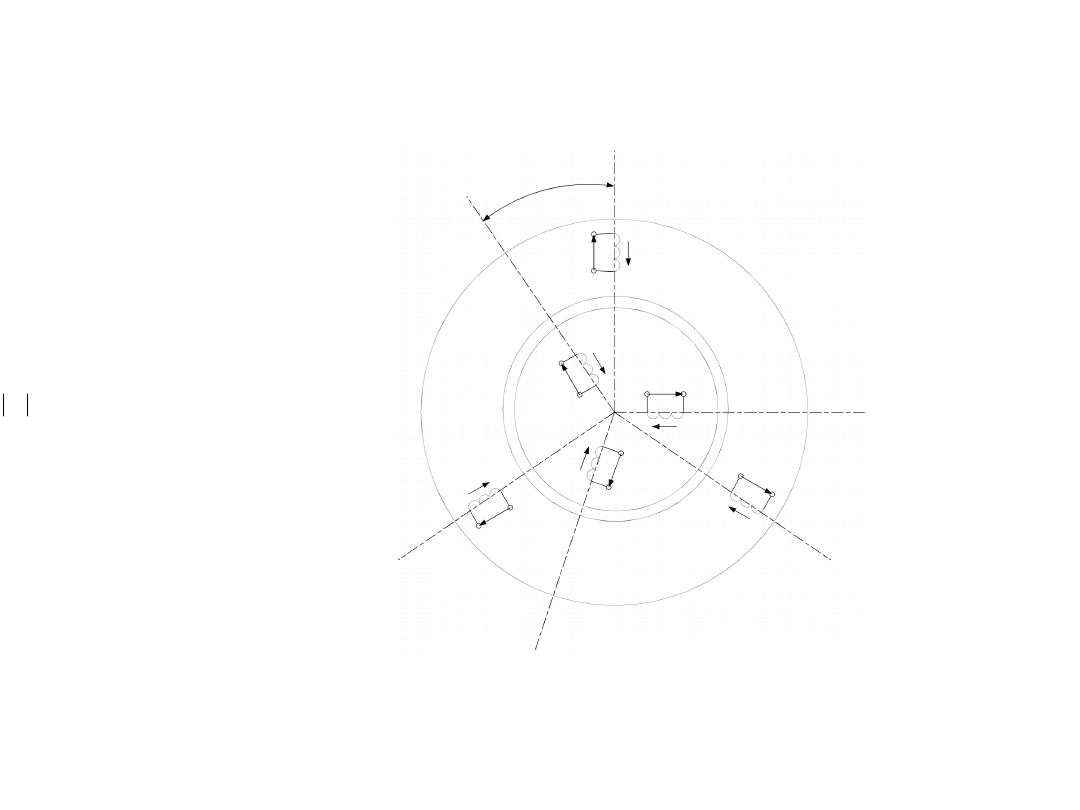
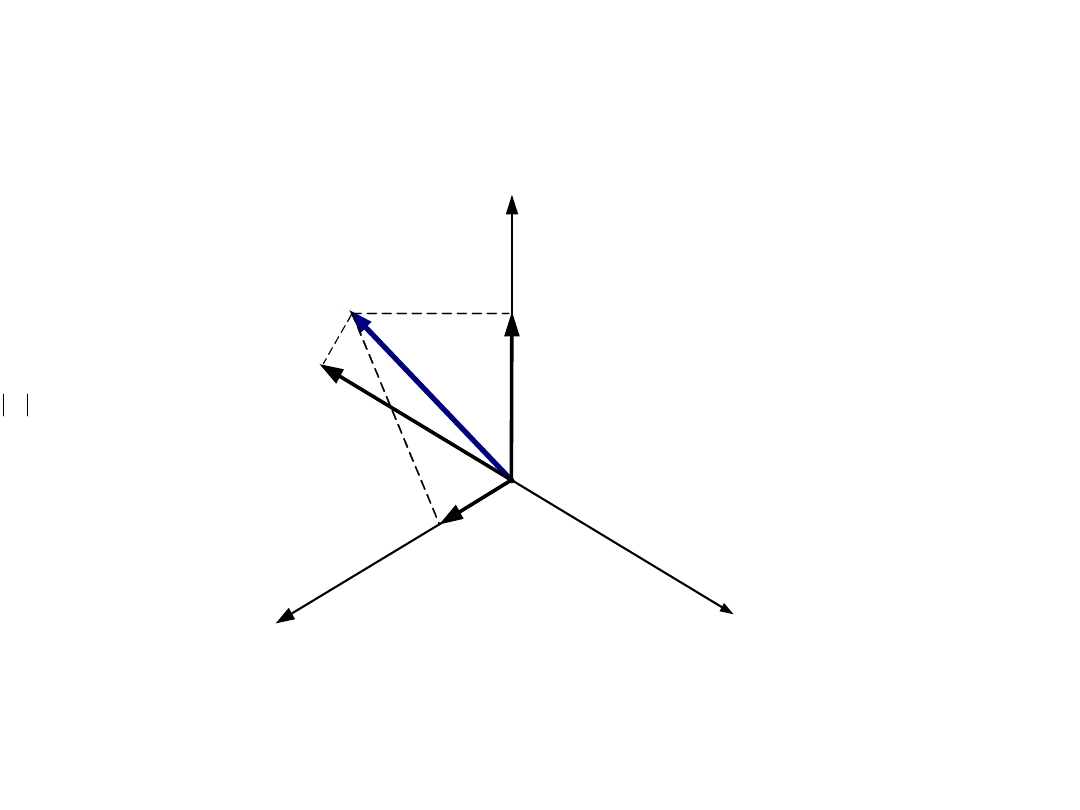
6
Konstrukcja wektora przestrzennego k na podstawie wartości chwilowych
składowych fazowych kA, kB, kC
1
s
Ψ
Model matematyczny SI
A
C
B
t
k
C
2
a
t
k
B
a
t
k
A
1
1
a
2
a
k
2
3
k
0
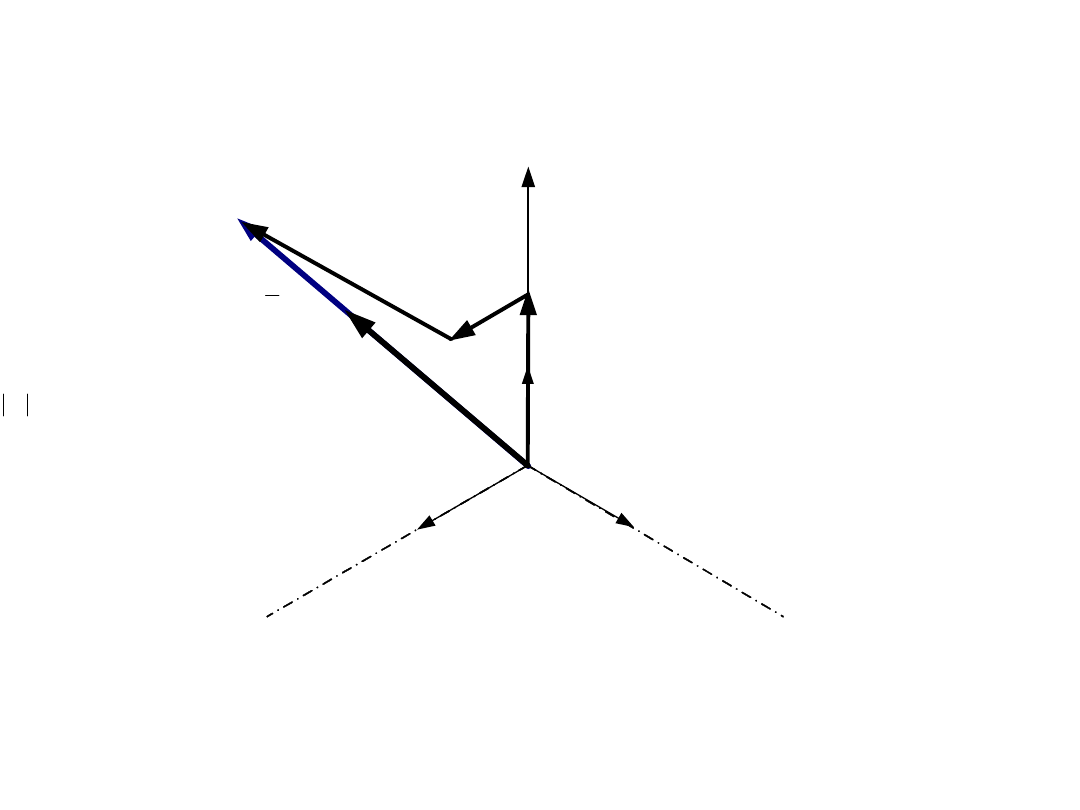
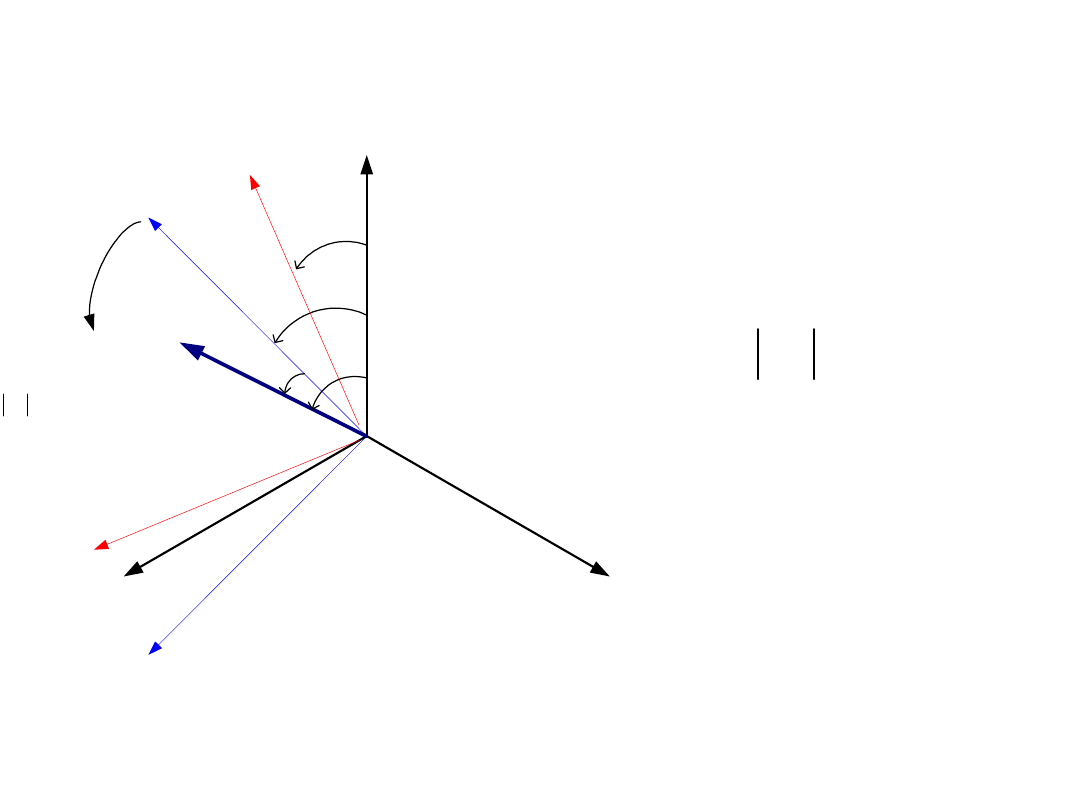
7
Wyznaczanie chwilowych wartości fazowych jako rzutów
wektora przestrzennego k
k
na osie odpowiednich faz (A-B-C)
1
s
Ψ
Model matematyczny SI
A
C
B
0
k
k
A
k
B
k
C
k
8
Model matematyczny SI
Wektor przestrzenny k w układzie współrzędnych prostokątnych (u-v)
wirującym z prędkością
k
1
s
Ψ
A
C
B
u
v
k
k
s
d
q
m
k
k
k
v
u
k
j
k
k
jk
k
e
k
k
9
Po transformacji zmiennych stojana według:
i odpowiednio dla wirnika:
1
s
Ψ
Model matematyczny SI
3
2
cos
3
2
cos
cos
3
2
k
C
k
B
k
A
u
k
k
k
k
3
2
sin
3
2
sin
sin
3
2
k
C
k
B
k
A
v
k
k
k
k
3
2
cos
3
2
cos
cos
3
2
m
k
c
m
k
b
m
k
a
u
k
k
k
k
3
2
sin
3
2
sin
sin
3
2
m
k
c
m
k
b
m
k
a
v
k
k
k
k
10
Otrzymuje się model matematyczny SI zapisany
za pomocą wektorów przestrzennych:
- równania napięciowe:
- równanie ruchu:
Model matematyczny SI
sk
k
sk
sk
s
sk
j
dt
d
R
Ψ
Ψ
I
U
rk
m
k
rk
rk
r
rk
j
dt
d
R
Ψ
Ψ
I
U
rk
sk
s
sk
M
L
L
I
I
Ψ
sk
rk
r
rk
M
L
L
I
I
Ψ
o
e
b
m
M
M
p
dt
d
J
sk
sk
b
e
p
M
I
Ψ
*
Im
2
3
M
r
r
M
s
s
L
L
L
L
L
L
11
Zapisując model SI w jednostkach
względnych (x [p.u.] = x [j.fiz.] / x
b
[j.fiz.]),
otrzymuje się następujące równania:
- równanie napięciowe obwodu stojana i
wirnika:
- równania strumieniowo-prądowe:
w których:
Model matematyczny SI
sk
k
sk
sk
s
sk
jω
dt
d
T
r
N
Ψ
Ψ
i
u
rk
m
k
rk
rk
r
rk
ω
j
dt
d
T
r
N
Ψ
Ψ
i
u
rk
sk
s
sk
M
x
x
i
i
Ψ
sk
rk
r
rk
M
x
x
i
i
Ψ
M
M
x
x
x
x
x
x
r
r
s
s
N
N
s
b
f
T
2
1
1
12
- równanie ruchu:
w którym:
przy czym:
Model matematyczny SI
o
e
m
m
m
T
dt
d
M
1
sk
sk
e
m
i
Ψ
*
Im
b
b
b
M
p
J
T
M

13
1
s
Ψ
Model matematyczny SI
Model matematyczny silnika indukcyjnego
zapisany za pomocą wektorów przestrzennych
wirujących z dowolna prędkością kątową ,
można zapisać w trzech układach
współrzędnych:
- w układzie () nieruchomym względem
stojana, czyli wirującym z prędkością ,
- w układzie (x - y) nieruchomym względem pola,
czyli wirującym z prędkością synchroniczną,
- w układzie (d - q) nieruchomym względem
wirnika, czyli wirującym z prędkością wirnika .
14
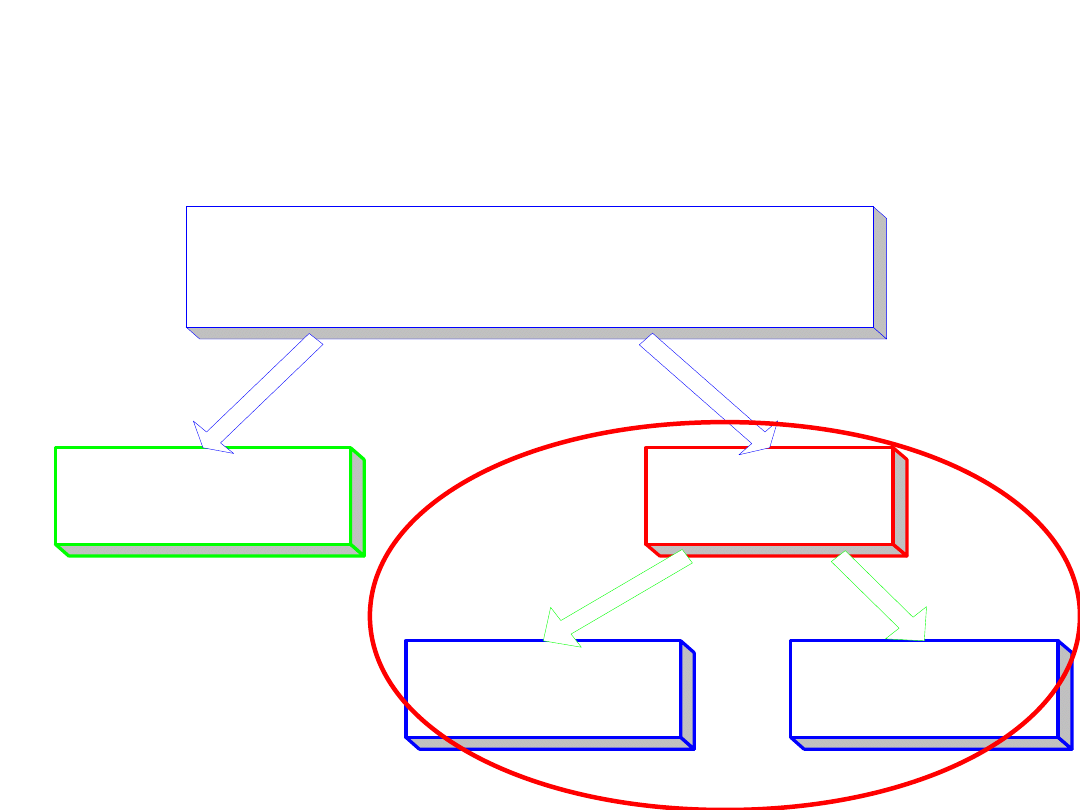
Współczesne metody sterowania
prędkością silników indukcyjnych
CZĘSTOTLIWOŚCIOWE METODY STEROWANIA
PRĘDKOŚCIĄ KĄTOWĄ SILNIKA INDUKCYNEGO
METODY POLOWO-
ZORIENTOWANE
METODY SKALRNE
METODY
WEKTOROWE
METODA
DTC -
BEZPOŚREDNIEGO
STEROWANIA
MOMENTEM
15
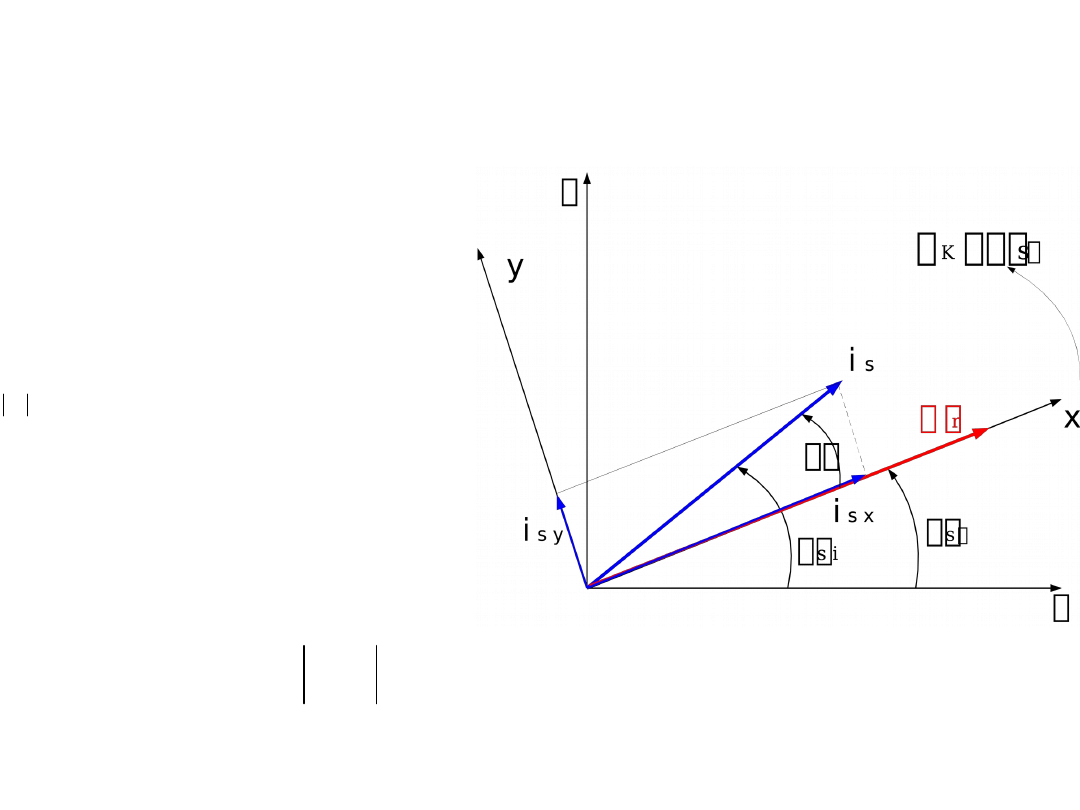
Przyjmuje się następujące
założenia:
• prędkość wirowania układu
współrzędnych jest równa
prędkości wirowania wektora
strumienia wirnika (układ
współrzędnych (x-y)):
• wektor strumienia wirnika
jest skierowany zgodnie
z osią x układu
współrzędnych:
• realizuje się wymuszenia
prądu stojana i
s
= i
sx
+ ji
sy
1
s
Ψ
Metoda polowo-zorientowana
)
(
s
k
s
k
.
0
,
ry
r
r
rx
r
Ψ
Ψ
16
Metoda polowo-
zorientowana
Wobec tego model matematyczny silnika przy
wymuszeniu wektora prądu stojana można
przedstawić w układzie współrzędnych (x-y) w
postaci następującego układu równań:
przy czym pulsacja poślizgu:
oraz równanie ruchu:
r
m
s
sy
r
M
r
ry
N
r
r
r
sx
r
M
r
r
N
i
x
x
r
dt
d
T
x
r
i
x
x
r
dt
d
T
0
m
s
r
,
1
o
sy
r
r
m
m
i
Ψ
x
x
T
dt
d
M
M
e
m
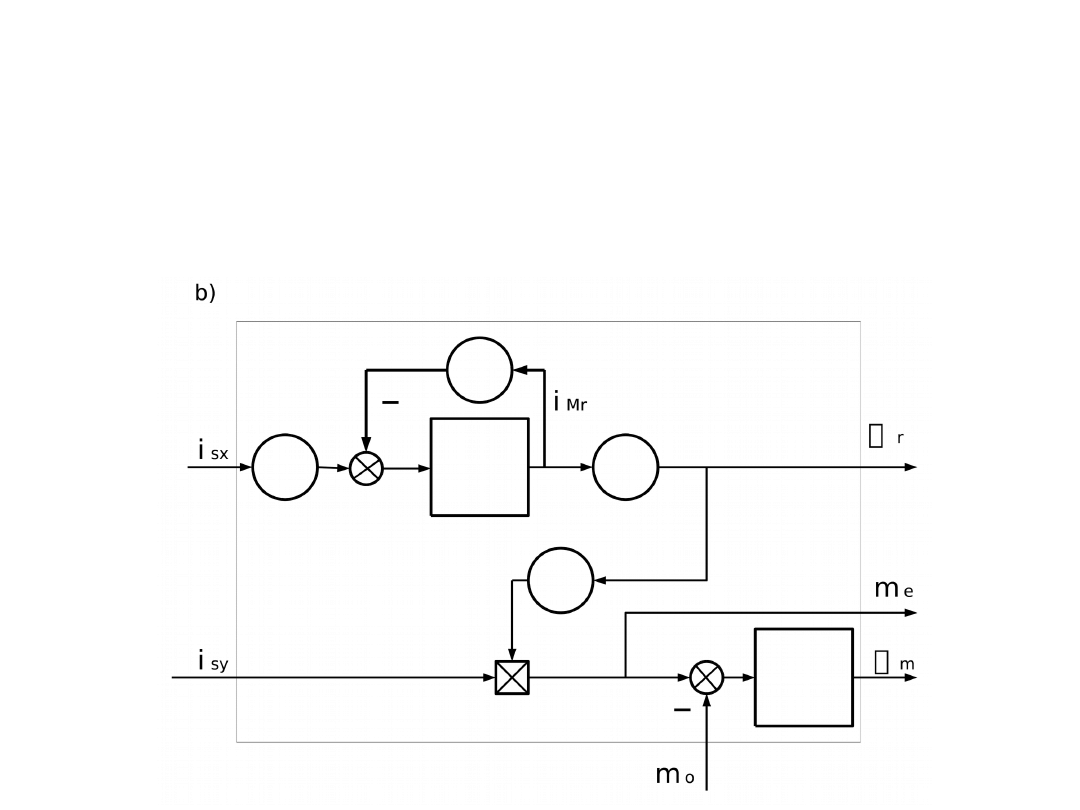
17
Schemat blokowy silnika
indukcyjnego
we współrzędnych polowych
Temu układowi równań odpowiada
schemat blokowy:
18
Analogia sterowania momentem
SPS
i SI – we współrzędnych polowych
Wzór na moment SPS:
Wzór na moment SI – sterowanego we
współrzędnych polowych:
Analogia:
sy
r
r
M
SI
e
i
x
x
m
t
w
SPS
e
i
c
m
sx
w
r
w
sy
t
i
i
SI
SPS
SI
i
SPS
i
)
(
)
(
)
(
)
(
2
)
,
(
2
)
,
(
SI
SPS
r
sy
w
t
i
i
19
SI przy wymuszeniu prądu stojana w układzie
współrzędnych prostokątnych zorientowanym
względem wektora strumienia wirnika staje się
liniowym obiektem sterowania.
Strumień wirnika jest kształtowany z pomocą
składowej
i
sx
wektora prądu stojana, natomiast
moment dla stałej wartości strumienia wirnika
zależy liniowo od składowej
i
sy
,
zgodnie z wzorem:
gdzie:
Rodzaje i realizacja metod
polowo-zorientowanych - FOC
sy
r
r
M
e
i
x
x
m
r
s
s
sy
i
i
Ψ
i ,
;
sin

20
Poszczególne realizacje systemów sterowania FOC różnią
się między sobą przede wszystkim:
• metodą wyznaczania kąta
s
(potrzebnego do
transformacji zmiennych);
• metodą estymacji wektora strumienia i momentu;
• metodą regulacji prądu falownika PWM.
Najważniejszym podziałem, który istotnie zmienia
strukturę sterowania, jest podział wynikający ze
sposobu wyznaczania kąta
s
.
Są to odpowiednio
- metoda bezpośredniego sterowania polowo-
zorientowanego - DFOC
- pośredniego sterowania polowo-zorientowanego - IFOC
1
s
Ψ
Metoda polowo-zorientowana
21
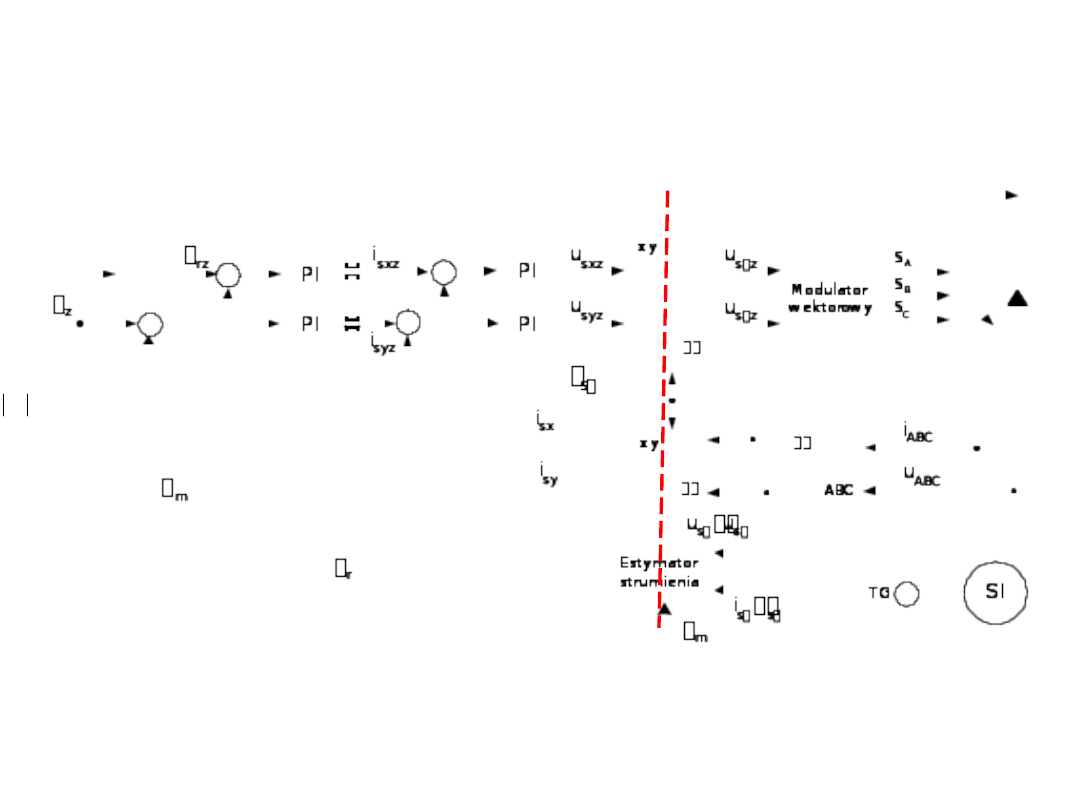
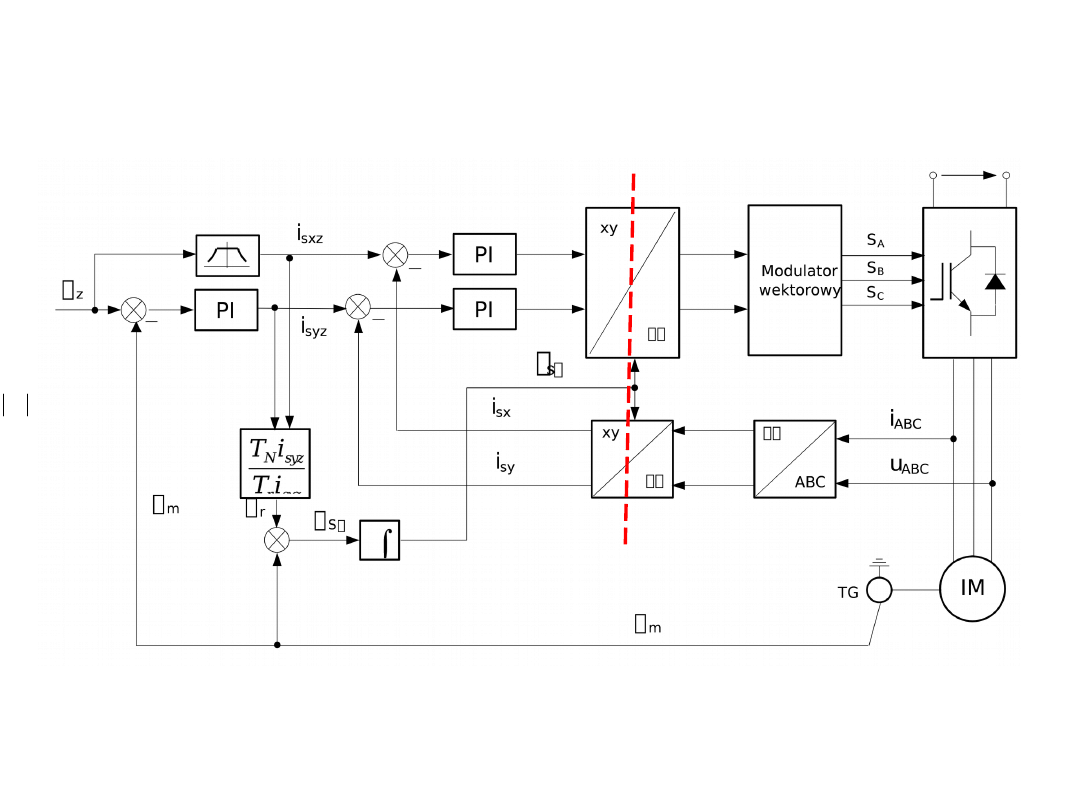
Struktura układu bezpośredniego sterowania polowo-zorientowanego DFOC
przy wymuszeniu prądowym z regulatorami prądu PI (uproszczona)
1
s
Ψ
Metoda bezpośredniego
sterowania
polowo-zorientowanego DFOC
22
Regulatory prądu (typu PI lub inne) pracują w
zamkniętych pętlach regulacji, w układzie
współrzędnych polowych (x-y).
Sygnały prądowe do sprzężeń zwrotnych
uzyskuje się po transformacji mierzonych
prądów fazowych uzwojenia stojana do układu
():
a następnie do układu współrzędnych (x-y):
1
s
Ψ
Metoda bezpośredniego
sterowania
polowo-zorientowanego DFOC
,
2
3
1
,
sB
sA
s
sA
s
i
i
i
i
i
.
cos
sin
,
sin
cos
s
s
s
s
sy
s
s
s
s
sx
i
i
i
i
i
i

23
Regulatory prądu generują na swoich wyjściach
wartości zadane polowo-zorientowanych
składowych wektora napięcia stojana [u
sx
, u
sy
] ,
które są transformowane do układu (),
a następnie modulator wektorowy oblicza
sygnały sterujące dla tranzystorów mocy
falownika MSI.
1
s
Ψ
Metoda polowo-zorientowana
DFOC
.
cos
sin
,
sin
cos
s
syz
s
sxz
z
s
s
syz
s
sxz
z
s
u
u
u
u
u
u

24
Metoda pośredniego
sterowania
polowo-zorientowanego IFOC
Podstawową cechą odróżniającą pośrednie IFOC od
sterowania bezpośredniego DFOC jest inny sposób
uzyskiwania informacji o aktualnym położeniu wektora
strumienia wirnika.
W sterowaniu bezpośrednim informacja pochodzi z
układu odtwarzającego składowe wektora strumienia
wirnika na podstawie pomiaru prądów i napięć silnika –
z estymatora tej zmiennej stanu.
Natomiast w układzie sterowania pośredniego
informacja ta uzyskiwana jest w wyniku zsumowania
zmierzonej wartości prędkości wału i obliczonej
wartości pulsacji poślizgu na podstawie wzoru i
zadanych w układzie sterowania wartości składowych
wektora prądu stojana, zgodnie z zależnością:
z
sy
z
sx
r
N
z
sy
z
r
r
N
M
r
rz
i
i
T
T
i
x
T
x
r

25
Po zsumowaniu zadanej wartości pulsacji poślizgu
i zmierzonej wartości prędkości kątowej silnika:
i wykonaniu całkowania, otrzymuje się wartość szukanego
kąta
s
:
Wartość kąta
s
jest doprowadzona do układu
generującego funkcje sin
s
, cos
s
, które następnie
wykorzystywane są w układzie przetwornika (x–y/
-
).
Sygnały te następnie po przeliczeniu do układu
trójfazowego są wielkościami sterującymi dla obwodów
regulacji prądu przemiennika częstotliwości.
1
s
Ψ
Metoda
pośredniego sterowania
polowo-zorientowanego IFOC
rz
m
s
t
s
s
dt
26
Metoda polowo-zorientowana
IFOC
z regulatorami prądu PI
1
s
Ψ
Struktura układu pośredniego sterowania polowo-zorientowanego
IFOC
przy wymuszeniu prądowym z regulatorami prądu PI (uproszczona)

27
Dziękuję z uwagę
1
s
Ψ
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
Wyszukiwarka
Podobne podstrony:
11 Na czym polega idea sterowania wektorowego maszyn indukcyjnych
20, LAB20P, Wynikiem dzia˙ania si˙y na elektron b˙dzie zakrzywienie jego toru w p˙aszczyznie prostop
20, wstep qbak 20, Wynikiem dzia?ania si?y na elektron b?dzie zakrzywienie jego toru w p?aszczyznie
20, FIZ20, Wynikiem dzia˙ania si˙y na elektron b˙dzie zakrzywienie jego toru w p˙aszczyznie prostopa
20, FIZA20, Wynikiem dzia˙ania si˙y na elektron b˙dzie zakrzywienie jego toru w p˙aszczyznie prostop
OCENA STANU UKŁADU NAPEDOWEGO STEROWANEGO METODA ORIENTACJI WEKTORA POLA
si zalewska pri w7 w8
00501 Kinematyka D part 1 2008 teoria wektory, układ SI(1)
SI wstep
w8 VLAN oraz IP w sieciach LAN
Układy Napędowe oraz algorytmy sterowania w bioprotezach
W8 kwas glutaminowy
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
Sterowce
SI Slowniczek VIsem
SI – Sensory Integration
więcej podobnych podstron