Model funkcjonalny
wózka widłowego
Mateusz
Lewicki
Grupa 4.2
Rok :
2011/2012
POLITECHNIKA WARSZAWSKA
Wydział Samochodów i Maszyn
Roboczych

2
Plan prezentacji:
Definicja modelu funkcjonalnego;
Model funkcjonalny wózka
widłowego;
Podsumowanie;
Bibliografia;

3
Definicja modelu
funkcjonalnego:
Model funkcjonalny - ma cechy modelu
konstrukcyjnego rozszerzone o możliwość
wczesnego sprawdzenie poszczególnych funkcji
wyrobu (montowalności, kinematyki,
dostępności dla obsługi). Ukazuje kilka lub
wszystkie ważne
funkcje wyrobu. Stanowi podstawę do
prezentacji wyrobu wobec klientów i
poddostawców.
Dostarcza warunków brzegowych do budowy
narzędzi i form oraz dla konstrukcji
i wykonywania środków produkcji.

4
Tworzenie modelu
funkcjonalnego:
Określenie zadań pełnionych przez
maszynę, funkcji które musi spełniać
Analiza budowy maszyny i układów
kinematycznych
Określenie parametrów diagnostycznych
Dobór czujników i określenie pomiarów
wykonywanych w trakcie pracy
Budowa interfejsu operatora
Możliwości automatyzacji maszyny

5
Model funkcjonalny wózka
widłowego:
Funkcja wózka widłowego;
Budowa wózka widłowego;
Układ kinematyczny wózka widłowego;
Czujniki i pomiary;
Diagnostyka układów roboczych
wózka;
Możliwości automatyzacji;

6
Funkcje wózka widłowego
Transport towarów wewnątrz
magazynów;
Transport towarów w supermarketach;
Załadunek i rozładunek palet z
towarem;

7
Budowa wózka widłowego
1. Bloczek łańcucha
2. Maszt
3. Łańcuch
4. Dźwignie
sterowania
masztem i
podnośnikiem
5. System
hydrauliczny
6. Krata ochronna
7. Widły
8. Rama
9. Silnik
10. Klatka
bezpieczeństwa
8
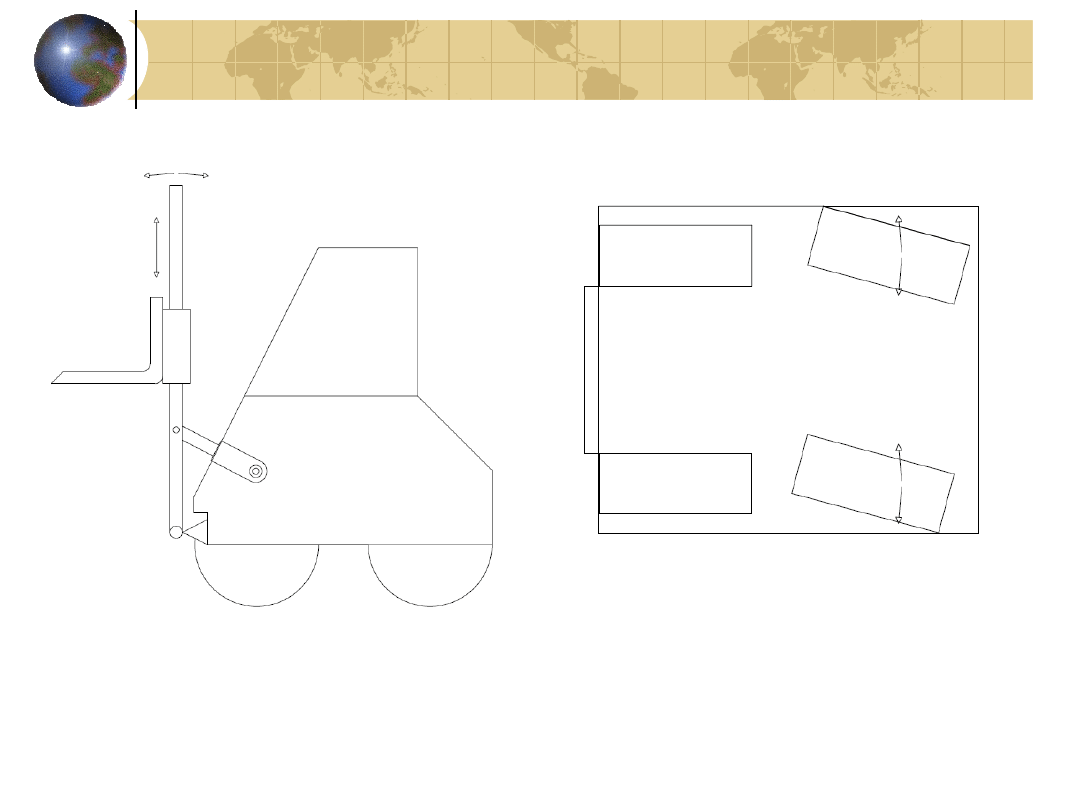
Układ kinematyczny wózka
Kinematyka
osprzętu
Kinematyka skrętu
(widok od dołu, bez
osprzętu, skręt osi
tylnej)
9
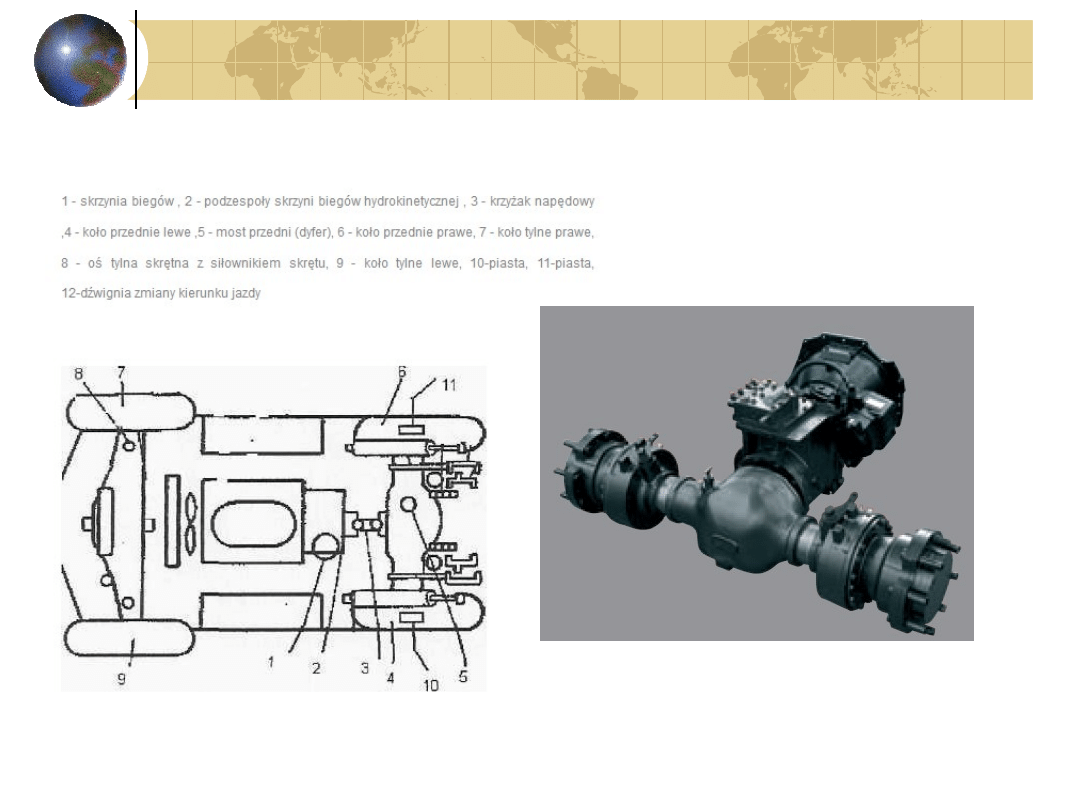
Mechanizm jazdy wózka
Przykładowy układ-
HYUNDAI

10
Mechanizmy wózka:
Mechanizm jazdy- zazwyczaj napęd przedni
(czasem 4x4) z przekładnią hydrokinetyczną
(zdarzają się hydrostatyczne);
Mechanizm podnoszenia- za pomocą łańcucha i
zestawu rolek, siłownika podnoszenia-
hydrauliczny;
Mechanizm wychylania masztu- hydrauliczny;
Mechanizm skrętu- skrętne koła tylne, za pomocą
siłowników i sterowania pompą typu Orbitrol;
Spotyka się także mechanizm przesuwu
bocznego wideł;
11
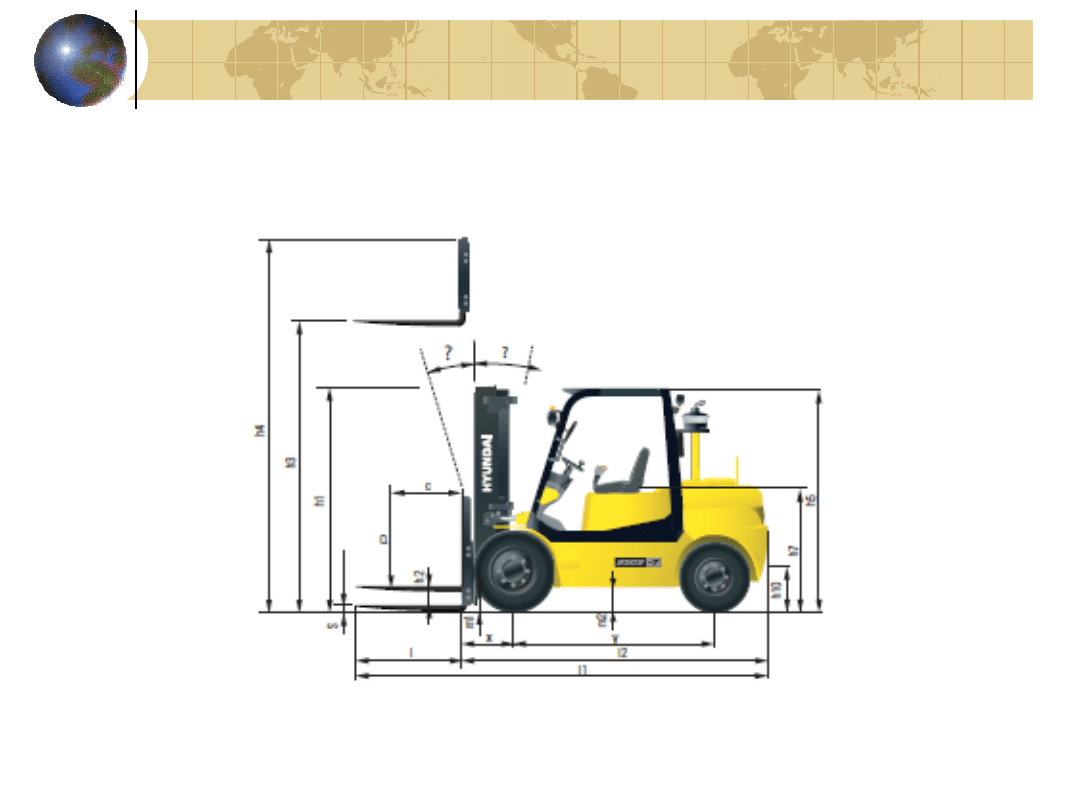
Przykładowe dane
rzeczywistego wózka:
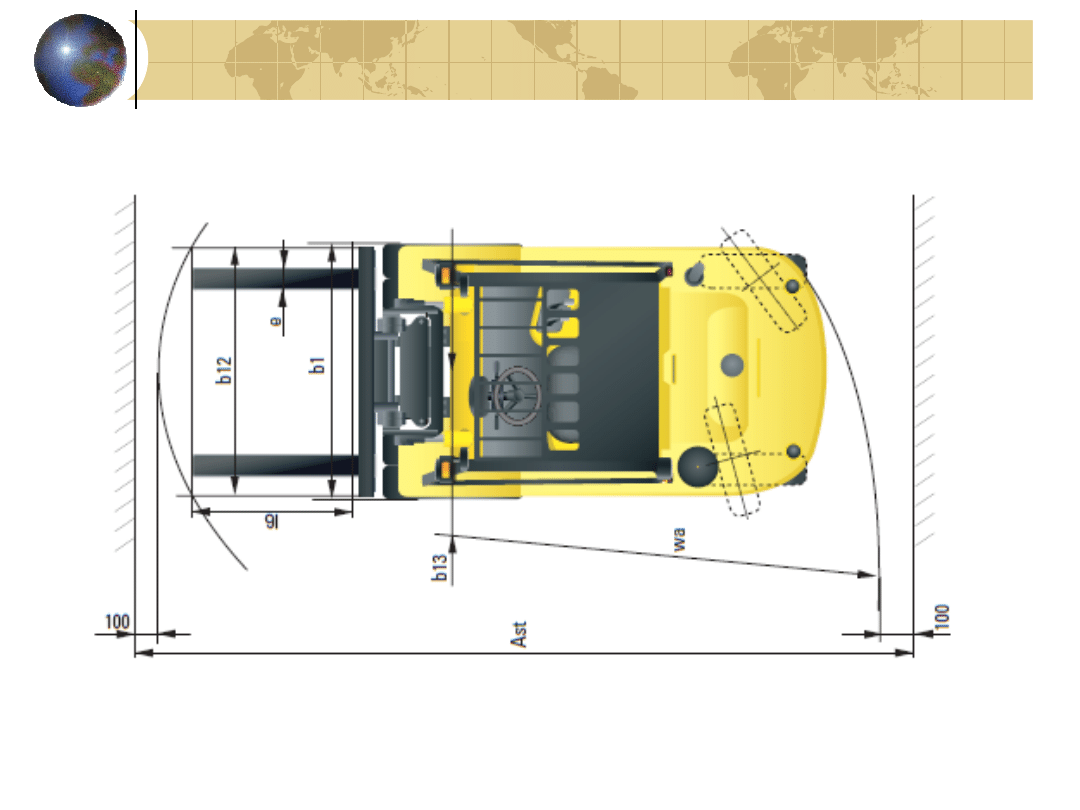
12

13
Parametry możliwe do kontroli
Parametry pracy silnika i układu
napędowego (w zależności od
rodzaju napędu);
Udźwig;
Wysokość podnoszenia;
Kąt wychylenia masztu;

14
Czujniki i pomiary
Czujniki w silniku i układzie
napędowym (temperatura, ciśnienie,
drgania itp.)
Czujniki wykrywające możliwą utratę
stateczności;
Czujnik udźwigu (np. tensometryczny)
Czujniki wychylenia masztu (np.
Enkodery)
Czujniki do pomiaru wysokości;
15
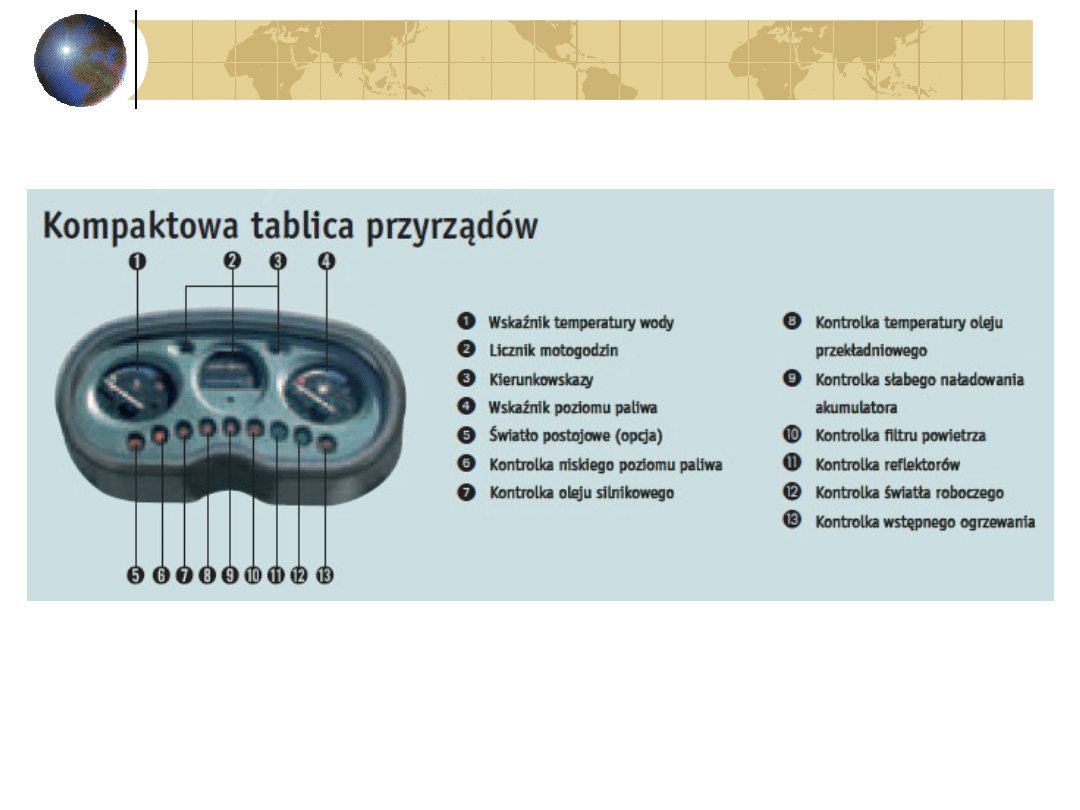
Panel wskaźników wózka
HYUNDAI
16
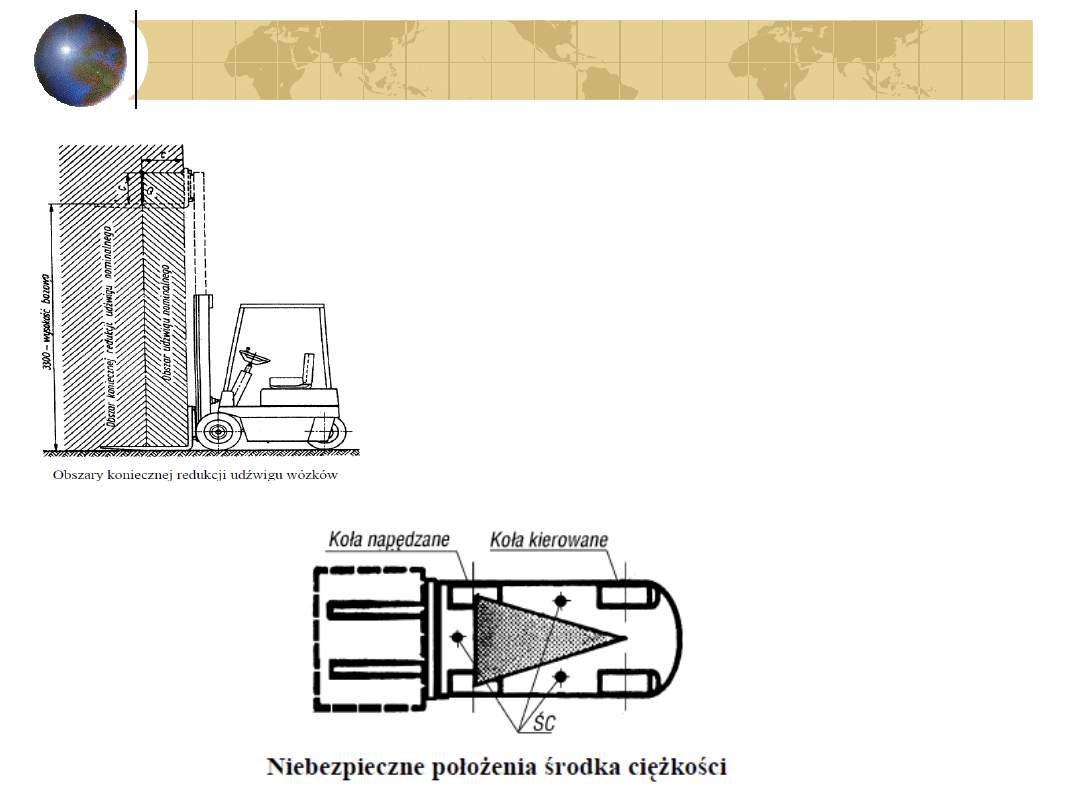
Stateczność
Udźwig maksymalny należy
zredukować, gdy:
-Środek ciężkości ładunku, jest
poza punktem nominalnym (dalej);
-Podnosimy powyżej wysokości
maksymalnej;
-Wózek posiada przesuw boczny;

17
Możliwa automatyzacja
Istnieje możliwość praktycznie
całkowitej automatyzacji pracy
wózka widłowego. Jazda odbywa się
wtedy np. wzdłuż ścieżek
utworzonych przez przewody
zamurowane w podłożu. Wózek
dostaje zlecenie od programu
zarządzającego magazynem i
automatycznie udaje się do danego
regału po towar.

18
Przykładowy, zautomatyzowany
magazyn

19
Podsumowanie
Automatyzacja pozwala na
uniknięcie dużych kosztów,
związanych z zatrudnieniem i
„zawodnością” czynnika ludzkiego;
W dziedzinie wózków widłowych
diagnostyka nie jest nazbyt
rozbudowana;
Najważniejsze zadanie automatyki
w tej dziedzinie, to zachowanie
stateczności;

20
Bibliografia
Jan Szlagowski – Problemy Automatyzacji Pracy Maszyn
Roboczych, praca zbiorowa; Wydawnictwo MET,
Warszawa 2001,
http://www.mag-serwis.pl/katalogi_Hyundai/
http://techblog.horizon-host.com/index.php?
bb_pst_sys=7
http://en.wikipedia.org/wiki/Forklift_truck
http://pl.wikipedia.org/wiki/W%C3%B3zek_jezdniowy
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
Wyszukiwarka
Podobne podstrony:
Automaty?strakcyjne maszyna Turinga
Falownik-sprawko, Politechnika Poznańska (PP), Elementy i układy automatyzacji maszyn, Laboratorium,
tworzywa sztuczne-PREZENTACJA, Materiało- i maszynoznawstwo chemiczne
ster i automaty moje, Sterowanie i Automatyzacja Maszyn
sciaga www.przeklej.pl, Sterowanie i Automatyzacja Maszyn
Maszynoznawstwo prezentacja multimedialna
Maszynoznawstwo ogolne, Automatyka i Robotyka, Semestr 1, Maszynoznastwo, kolos, ściągi
Spr 1, AGH IMIR Mechanika i budowa maszyn, III ROK, Elementy automatyki przemysłowej, EAP lab1
Sprawozdanie automatyzcja pracy maszyn ogarnijtemat com
Mechanizm strugarki, Księgozbiór, Studia, Maszynoznastwo i Automatyka
MB2 Automatyzacja pracy maszyn roboczych na przykładzie koparki podsiębiernej ogarnijtemat com (
PKM - opracowania roznych pytan na egzamin 6, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
Metoda toru ocechowanego, Księgozbiór, Studia, Maszynoznastwo i Automatyka
Staliwa węglowe i konstrukcyjne stopowe, Inżynieria chemiczna i procesowa, Materiało- i maszynoznaws
W maszynach sterowych z pompami, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoł
Siemens, Mechanika i budowa maszyn, Semestr VI, Informatyka w eksploatacji pojazdów, Prezentacja
więcej podobnych podstron