DYNAMIKA
1.Zasady dynamiki Newtona
2.Prawo ruchu i zachowania środka
masy
3.Zasada zachowania pędu
4.Zderzenia
Kinematyka
- znając przyspieszenie (
a = f(t)
) każdego punktu
materialnego przewidujemy jego przyszłe położenie (
x
).
Dynamika
- informuje, że aby znać przyspieszenie (
a
), trzeba znać siłę
(
F
) działającą na cząstkę oraz masę cząstki (
m
), czyli bada siły i ich
źródła tzn. bada oddziaływania między ciałami powodujące zmiany
ruchu.
Dynamika
zajmuje się przyczyną ruchu (duże masy, małe
prędkości v<<c), tzn:
1) Mamy ciało o masie
m
,
2) Ciału nadajemy prędkość początkową
v
0
w otoczeniu, które
znamy,
3) Pytanie – jaki będzie ruch ciała?
Ad. 1 Zasady dynamiki Newtona
I zasada
-
PRAWO BEZWŁADNOŚCI
Ciało pozostaje w stanie spoczynku lub porusza się ze
stałą prędkością (v = const, a = 0), gdy działa na nie siła
wypadkowa równa zeru.
Ciało pozostaje w spoczynku lub porusza się ruchem jednostajnie
prostoliniowym (v = const, a = 0), dopóki działanie na niego
innych ciał nie spowoduje zmiany tego stanu.
F
wyp
– siła wypadkowa, jeżeli na ciało działa więcej sił F
1
… F
n
, to ich
działanie jest takie samo jak działanie jednej siły wypadkowej F
wyp
równej wektorowej sumie wszystkich działających sił, czyli
m
i
i
wyp
F
F
1
0
F
gdy
0
a
wyp
Inercjalny układ odniesienia
(jego istnienie wynika z I
zasady dynamiki)
I zasada dynamiki
-
jeżeli na badane ciało nie działają siły
zewnętrzne, to istnieje taki układ odniesienia (układ
inercjalny) w którym to ciało spoczywa lub porusza się
ruchem jednostajnym prostoliniowym (bez przyspieszenia).
W układach inercjalnych ruchami ciał rządzą dokładnie te
same prawa.
Bezwładność ciał
Zgodnie z I zasadą dynamiki
ciało zachowuje swój stan ruchu,
dopóki oddziaływanie innych ciał nie zmieni tego stanu
. Tę
własność ciał nazywamy
bezwładnością
.
Jeżeli
chcemy
stosować
zasady
dynamiki
w
układach
nieinercjalnych
, konieczne jest uwzględnienie sił bezwładności
(pozornych),
np. obserwator w jadącym pociągu lub windzie (ruch postępowy),
siły odśrodkowej i Coriolisa (ruch obrotowy).
Zasady dynamiki Newtona spełnione są w układach
inercjalnych, tj. w układach poruszających się ruchem
jednostajnym
prostoliniowym
względem
układu
nieruchomego.
Siła
Miarą oddziaływania między ciałami jest
wielkość
wektorowa zwana siłą
:
jedn.
(N =
kgm/s
2
)
a
m
F
Masa ciała
Gdy dwa ciała działają na siebie, to zmieniają nawzajem swój stan
ruchu; poruszają się w przeciwnych kierunkach z pewnymi
prędkościami (np. masy na sprężynie, m
0
- masa znana, m – masa
nieznana).
m
0
m
v
0
v
Nieznaną masę definiujemy jako:
v
v
m
m
const
v
v
v
t
t
v
a
a
m
m
a
m
ma
0
0
0
0
0
0
0
0
Prędkość będzie tym większą, im mniejsza jest bezwładność ciała.
Dla danych dwóch ciał stosunek uzyskanych prędkości jest
wielkością stałą.
Tak zdefiniowaną wielkość m nazywaną
masą ciała
(jedn.
kg
).
Gęstość ciała
Gęstość ciała
ρ nazywamy stosunek jego masy m do objętości V:
Jednostka
(kg/m
3
)
.
V
m
Pęd ciała
Pęd ciała
definiujemy jako iloczyn jego masy m i prędkości v:
v
m
p
Tempo zmiany pędu ciała jest równe sile wypadkowej
działającej na to ciało.
dt
p
d
dt
v
m
d
a
m
F
czyli
m
F
a
wyp
wyp
)
(
II zasada
Ciało, na które działają stałe siły, porusza się ruchem
jednostajnie przyspieszonym z przyspieszeniem a, którego
wartość i kierunek są określone stosunkiem siły wypadkowej F
do masy ciała m.
lub
a
m
dt
dm
v
dt
v
d
m
dt
dm
v
v
m
dt
d
F
const
m
gdy
a
m
dt
v
d
m
v
m
dt
d
dt
p
d
F
const
m
gdy
)
(
)
(
II zasadę dynamiki Newtona można zapisać za pomocą pędu następująco:
układy o
stałej masie
Układy o
zmiennej masie
np. rakieta
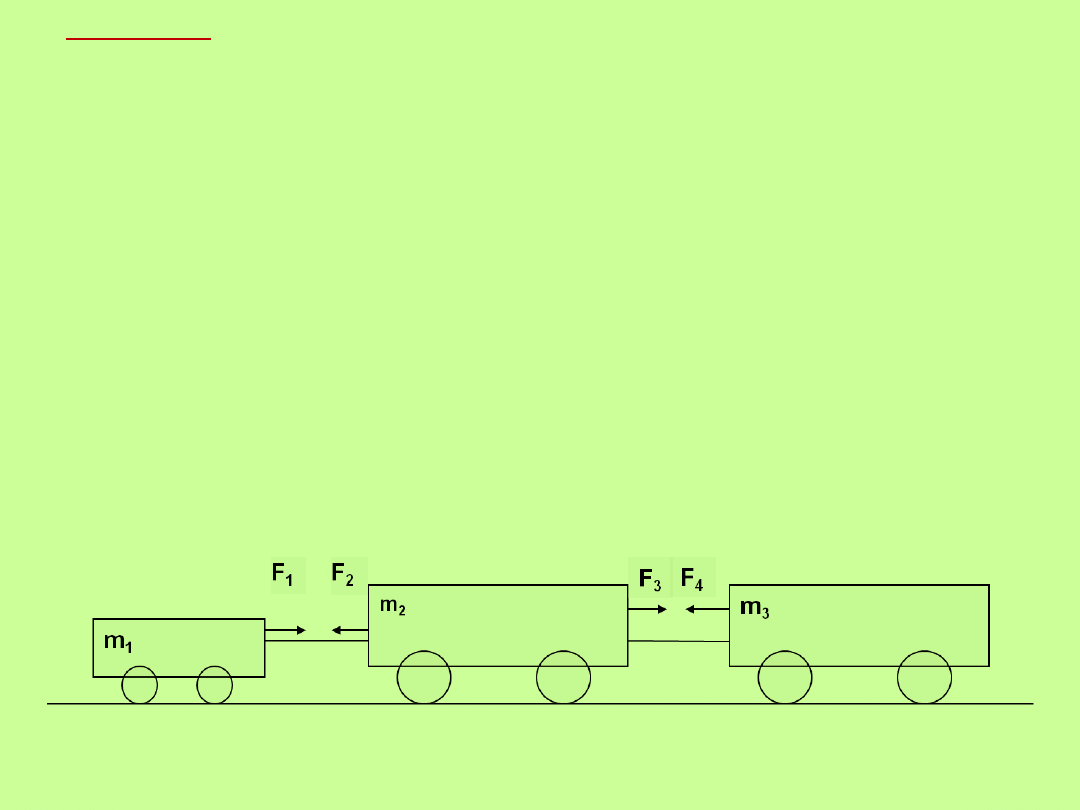
III zasada
– PRAWO AKCJI I REAKCJI
Siły są zawsze wynikiem oddziaływania dwóch ciał. Dwa ciała
działają na siebie siłami równymi co do wartości i przeciwnymi
co do zwrotu.
lub
Gdy dwa ciała oddziałują wzajemnie, to siła wywierana przez ciało
drugie na ciało pierwsze jest równa i przeciwnie skierowana do siły
jaką ciało pierwsze działa na ciało drugie.
B
A
F
F
Rys.1
np. F
1
= -F
2
F
3
= -F
4
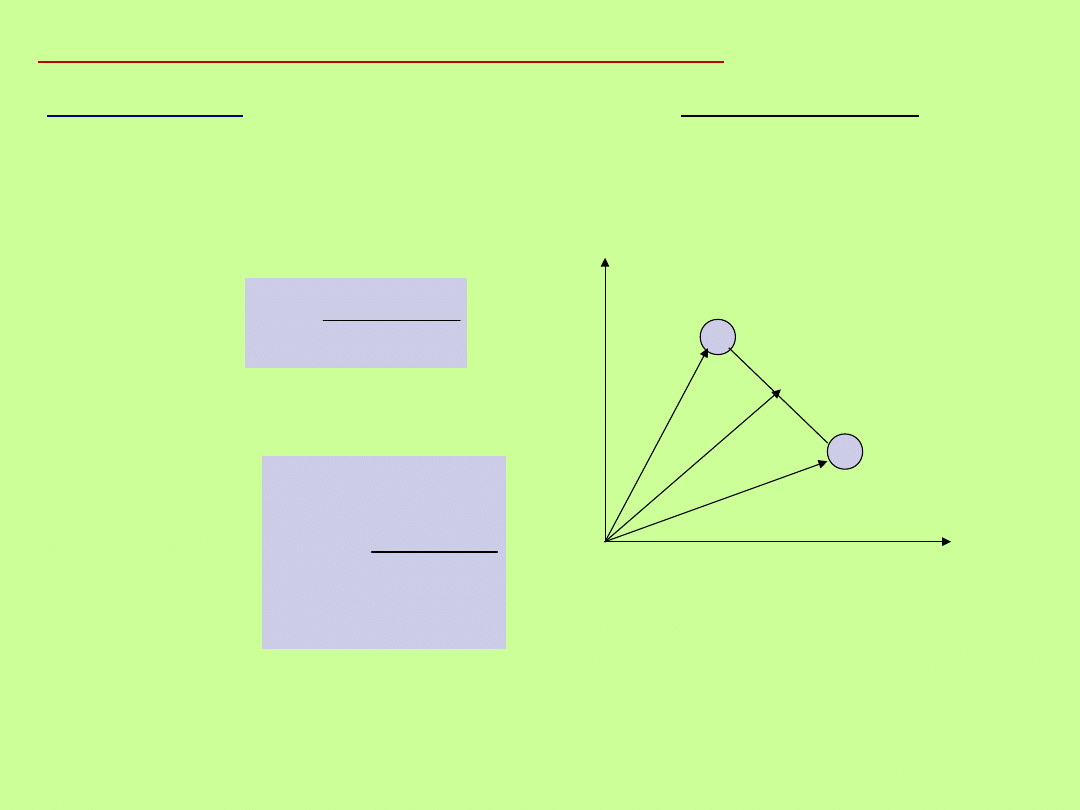
Ad. 2 Prawo ruchu i zachowania środka masy
i
i
i
i
i
śrm
m
r
m
r
r
i
– wektor wodzący i-tego punktu względem danego punktu
odniesienia
m
i
– masa i-tego punktu
r
śrm
– położenie środka masy
m
2
m
1
r
2
r
1
r
śrm
x
y
2
1
2
2
1
1
m
m
r
m
r
m
r
śrm
dla n – mas (m
i
)
Środek masy
układu punktów materialnych - średnie położenie, przy
czym masa jest czynnikiem ważącym (średnia ważona – wagami są
masy).
dla dwóch mas (n = 2)
Jeśli M = m
i
– masa całkowita
i
i
i
śrm
i
i
i
śrm
r
m
r
M
M
r
m
r
czyli
Środek masy
układu punktów materialnych zależy od mas tych
punktów i ich wzajemnego rozmieszczenia (nie zależy od wyboru
układu odniesienia).
i różniczkując to równanie dwukrotnie względem czasu, otrzymamy
Dla ciała o ciągłym rozkładzie masy wyrażenie opisujące środek masy ma postać:
dV
dm
m
V
gdzie
dV
dV
r
dm
dm
r
r
śrm
ρ – gęstość ciała
r – jest odległością elementu masy dm ciała o ciągłej budowie od
wybranego początku układu
i
i
i
śrm
r
m
r
M
Korzystając z def. środka masy
i różniczkując to równanie dwukrotnie względem czasu, otrzymamy
dt
r
d
m
dt
r
d
M
i
i
i
śrm
2
2
2
2
dt
r
d
m
dt
r
d
M
i
i
i
śrm
stąd
Środek masy
układu punktów materialnych (ciała) porusza się w
taki sposób, jakby cała masa układu była skupiona w środku masy i
jakby wszystkie siły zewnętrzne nań działały.
Wprowadzamy duże uproszczenie zastępując ruch całego ciała
ruchem jego środka masy.
Prawo to obowiązuje dla każdego układu pkt. materialnych.
Gdy siłą zewnętrzną jest siła ciężkości, to wtedy działa ona na
środek ciężkości
.
W rozważanych przypadkach środki masy i ciężkości pokrywają się.
zew
i
i
i
śrm
F
a
m
a
M
Prawo ruchu środka masy
Prawo zachowania środka masy
Jeżeli suma sił zewnętrznych jest równa zeru czyli siły zewnętrzne
nie działają (układ izolowany), to położenie środka masy nie ulega
zmianie.
Układ odosobniony (zamknięty lub izolowany) - układ, na który nie
działają żadne siły zewnętrzne.
Całkowity pęd
układu punktów materialnych jest równy iloczynowi
całkowitej masy i prędkości środka jego masy.
Prawo zachowania pędu
- jeżeli wypadkowa sił zewnętrznych
działających na układ wynosi zero (F
zew
= 0), wtedy całkowity
pęd układu pozostaje stały.
const
P
wtedy
dt
P
d
dt
v
m
d
dt
v
d
m
a
m
F
zew
0
)
(
1) Gdy mamy do czynienia z układem pkt. materialnych o masach m
1
…m
n
i
2) P – całkowity pęd układu pkt. - suma wektorowa pojedynczych
pędów
Zasada zachowania pędu
czyli
całkowity pęd układu odosobnionego jest wielkością stałą w
każdym czasie
.
śrm
v
M
P
const
v
m
p
P
i
i
i
i
m
M
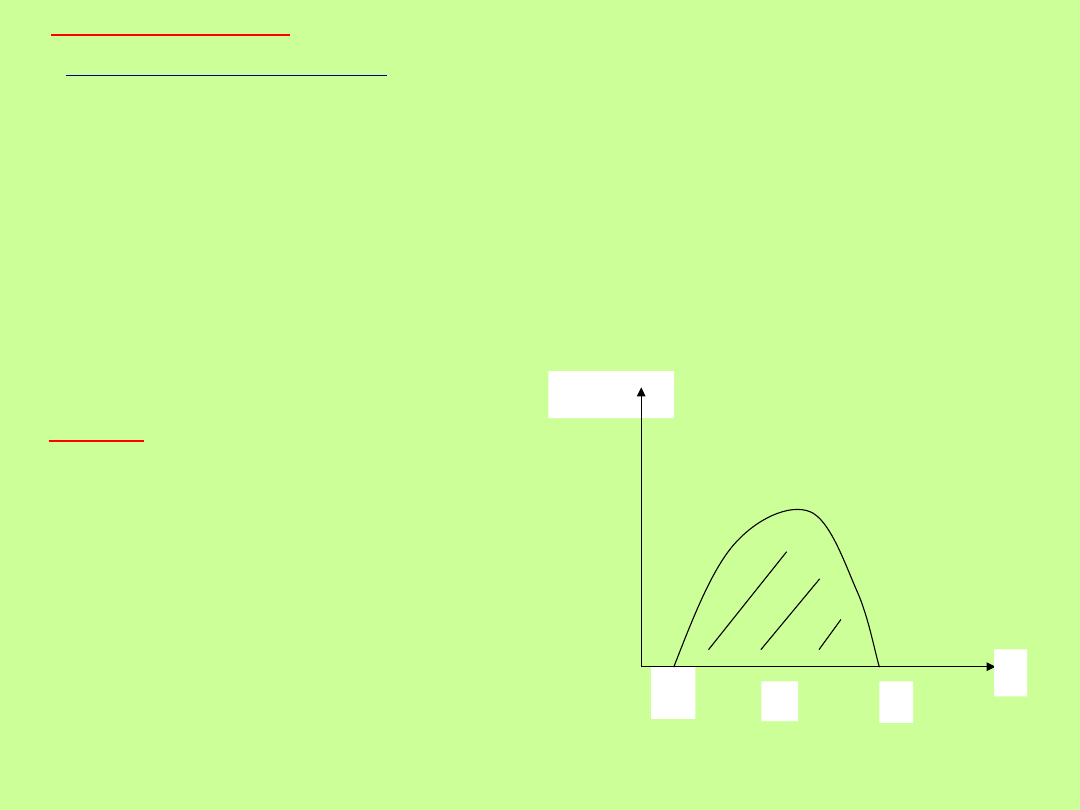
Popęd
Podczas zderzenia na każdy
punkt materialny działa wielka
siła, ale przez krótki czas (np. kij
uderzający w piłkę).
Siła ta zmienia się w czasie w
bardzo złożony sposób – siły
tego typu nazywamy
siłami
impulsowymi
(zderzeniowymi).
t
1
F(x)
t
t
2
∆t
Ad. 4 Zderzenia
Klasyfikacja zderzeń:
-
elastyczne
(sprężyste) – gdy energia kinetyczna jest
zachowana
w
zderzeniu
-
nieelastyczne
– ozn., że początkowa energia kinetyczna jest
tracona
podczas zderzenia.
Na podstawie II zasady dynamiki
dt
F
p
d
F
dt
p
d
)
0
(
2
1
2
1
1
2
t
const
F
dla
dt
F
p
d
p
p
p
t
t
p
p
Popęd siły
- zmiana (przyrost) pędu ciała.
Miara popędu siły - powierzchnia zawarta pod krzywą
(całka).
t
F
p
Prawo pędu i popędu
Suma wszystkich sił zewnętrznych działających na poszczególne
punkty układu jest równa pochodnej całkowitego pędu układu
względem czasu
i
i
i
i
zew
zew
v
m
p
P
f
F
gdy
dt
P
d
F
,
Ruchem układu punktów materialnych ciał rządzą prawa:
- ruchu środka masy
- zachowania środka masy
- pędu i popędu.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
Wyszukiwarka
Podobne podstrony:
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
Zaburzenia nerwicowe wyklad
Szkol Wykład do Or
Strategie marketingowe prezentacje wykład
Wykład 6 2009 Użytkowanie obiektu
wyklad2
wykład 3
wyklad1 4
więcej podobnych podstron