
C 01 p
1
ILOCZYNY WEKTORÓW
cos ( , )
a b ab
a b
� =
r
r
r
r
S
Iloczyn skalarny dwu
wektorów:
(
) (
)
x x
y y
z z
x x
y y
z z
x x
y y
z z
a b
a i
a i
a i
b i
b i
bi
a b a b a b
� =
+
+
�
+
+
=
+
+
r
r
r
r
r
r
r
r
• W kartezjańskim układzie współrzędnych prostokątnych:
Iloczyn skalarny dwu wektorów w układzie
współrzędnych
cylindrycznych ρ, φ, z:
(
) (
)
z z
z z
a b
a i
a i
a i
b i
b i
bi
r r
j j
r r
j j
� =
+
+
�
+
+
r
r
r
r
r
r
r
r
i
a b
r
r
z z
a b a b
a b
a b
r r
j j
� =
+
+
r
r
Iloczyn skalarny dwu wektorów w układzie
współrzędnych
sferycznych r, θ, φ :
(
) (
)
r r
r r
a b
a i
a i
a i
bi
b i
b i
q q
j j
q q
j j
� =
+
+
�
+
+
r
r
r
r
r
r
r
r
i
a b
r
r
r r
a b a b a b
a b
q q
j
j
� =
+
+
r
r

C 01 p
2
ILOCZYNY WEKTORÓW (2)
|
|
sin ( , )
a b ab
a b
� =
r
r
r
r
S
Iloczyn wektorowy jest wektorem,
którego:
1. moduł wynosi
a b
�
r
r
2. kierunek jest prostopadły do płaszczyzny
rozpiętej na wektorach
i
a b
r
r
3. zwrot taki, że trójka uporządkowana ma taką
orientację jak przestrzeń, w której definiujemy iloczyn
wektorowy
, ,
a b a b
�
r
r
r
r
Podstawowe własności iloczynu
wektorowego
• Podstawowe związki
(
)
a b
b a
� =-
�
r
r
r
r
0
a a
� =
r
r r
(
)
(
) 0
a a b
b a b
=
״ =
״
r
r
r
r r
r
(
)
(
)
ma b m a b
� =
�
r
r
r
r
(
)
a b c
a b a c
� + = � + �
r
r
r
r
r
r r
[(
) ]
(
)(
)
(
)
(
)
m n a b
m n a b
m a b
n a b
+
� =
+
� =
� +
�
r
r
r
r
r
r
r
r
C 01 p
3
ILOCZYNY WEKTORÓW (3)
• Związki wyrażone przez wektory
bazy
1 2 3
, ,
i i i
r r r
1 1
2 2
3 3
a a i a i
a i
=
+
+
r
r
r
r
1 1
2 2
3 3
b bi b i
bi
=
+
+
r
r
r
r
2
3
3
1
1
2
1
2
3
1
2
3
i i
i i i i
a b
a
a
a
b
b
b
�
�
�
� =
r r r r r r
r
r
• Związki w kartezjańskich współrzędnych
prostokątnych
0
x
x
y
y
z
z
i
i
i
i
i i
� = � = � =
r
r r
r r
r r
x
y
z
i
i
i
� =
r r
r
z
x
y
i i
i
� =
r r
r
y
z
x
i
i
i
� =
r r
r
?
a b
� =
r
r
C 01 p
4
ILOCZYNY WEKTORÓW (4)
x x
y y
z z
a a i
a i
a i
=
+
+
r
r
r
r
x x
y y
z z
b b i
b i
b i
=
+
+
r
r
r
r
x
y
z
y
z
x
y
z
x
x
y
z
x
y
z
y
z
x
y
z
x
x
y
z
i
i
i
a
a
a
a
a
a
a b a
a
a
i
i
i
b
b
b
b
b
b
b
b
b
� =
=
+
+
=
r
r
r
r
r
r
r
r
(
)
(
)
(
)
y z
z y
x
z x
x z
y
x y
y x
z
a b a b i
a b a b i
a b
a b i
=
-
+
-
+
-
r
r
r
• Wybrane, podstawowe tożsamości
algebraiczne
(
)
(
)
(
)
A B C
B C A
C A B
״ =
״ =
״
r
r
r r
r r
r
r
r
(
) (
)
(
)
A B C
C A B
A B C
� � = �
-
�
r
r
r r
r
r
r
r
r
C 01 p
5
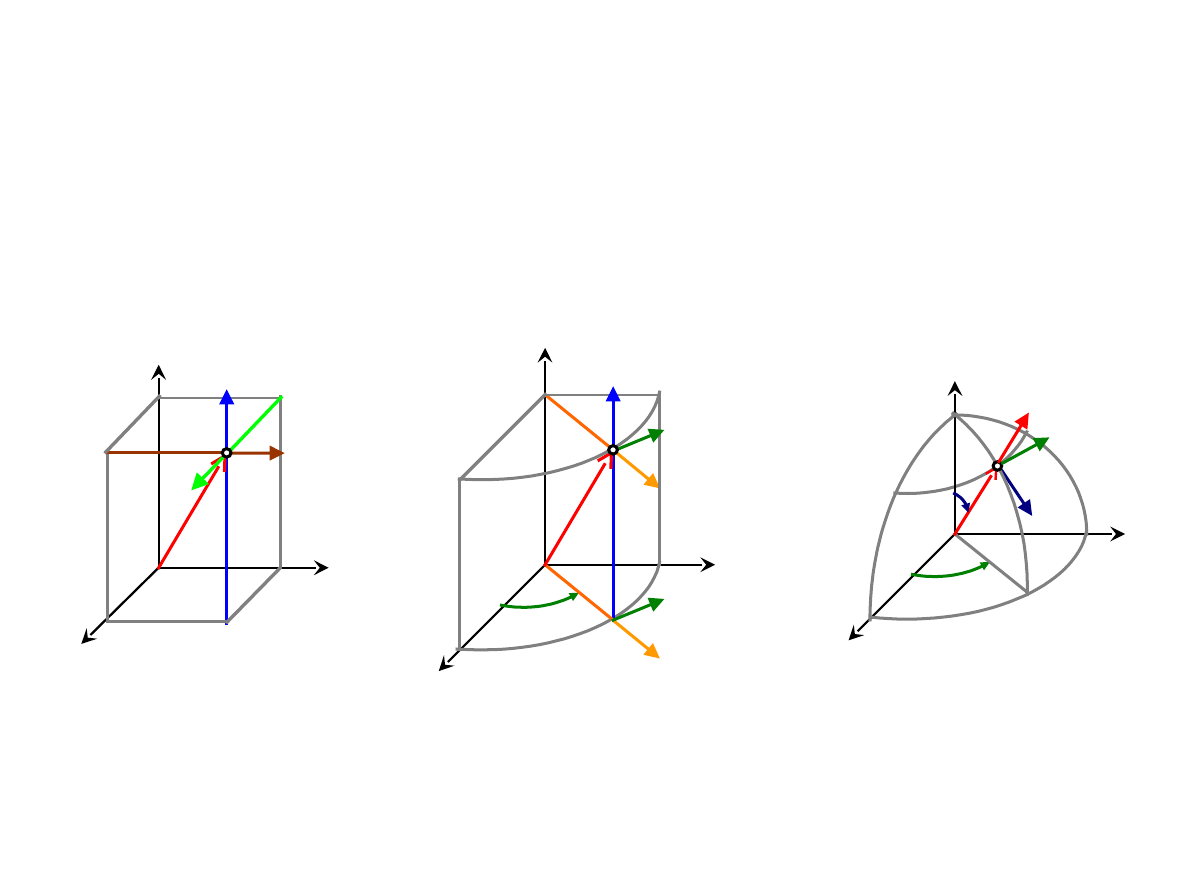
UKŁADY WSPÓŁRZĘDNYCH
x
y
z
i
q
r
r
i
r
r
j
i
j
r
q
Współrzędne
sferyczne
(r, θ, φ):
P
x
y
z
i
r
r
i
r
r
i
j
r
z
i
r
r
r
r
j
i
j
r
z
P
Współrzędne
cylindryczne
(ρ, φ, z):
Współrzędne
prostokątne
(x, y, z):
x
y
z
y
i
r
x
i
r
z
i
r
r
r
y
z
P
x
x
y
z
r xi
yi
zi
=
+
+
r
r
r
r
cos
x r
j
=
sin
y r
j
=
z z
=
sin cos
x r
q
j
=
sin sin
y r
q
j
=
cos
z r
q
=
C 01 p
6
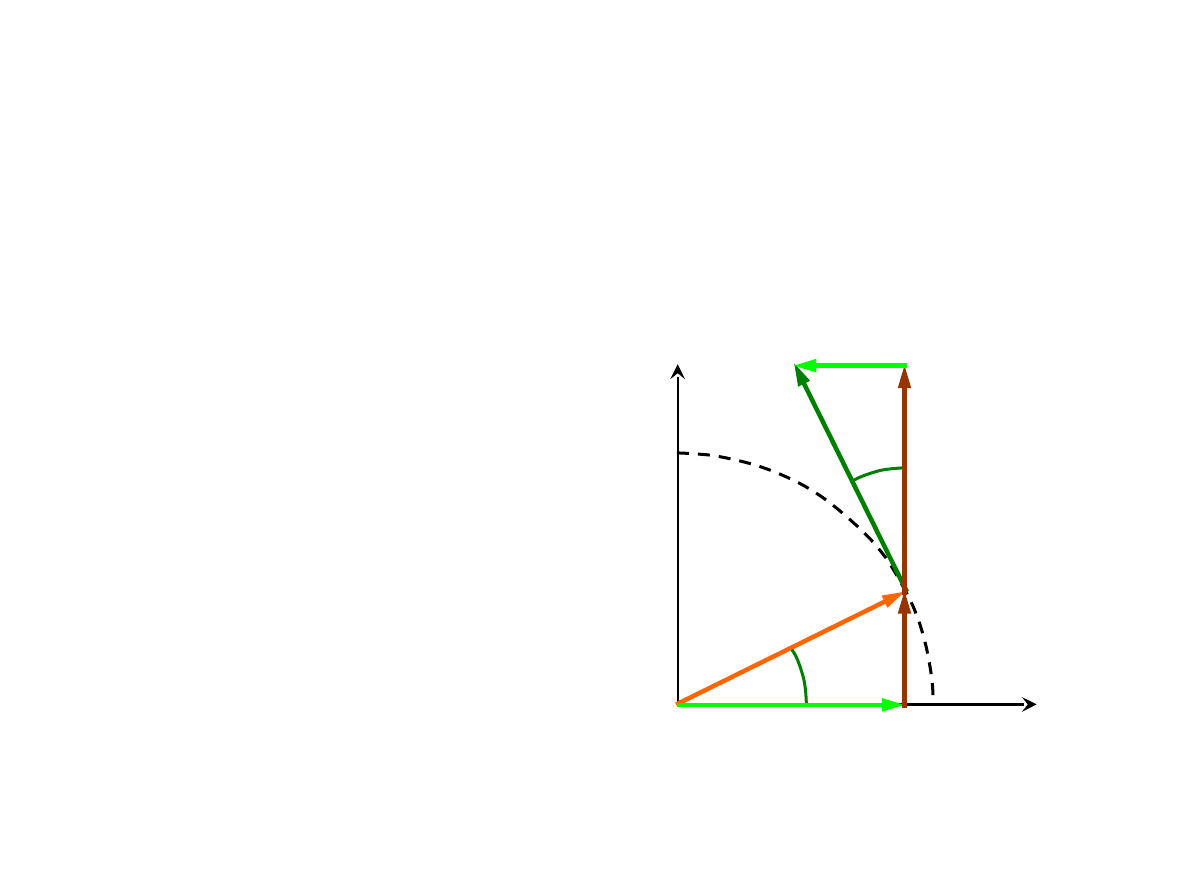
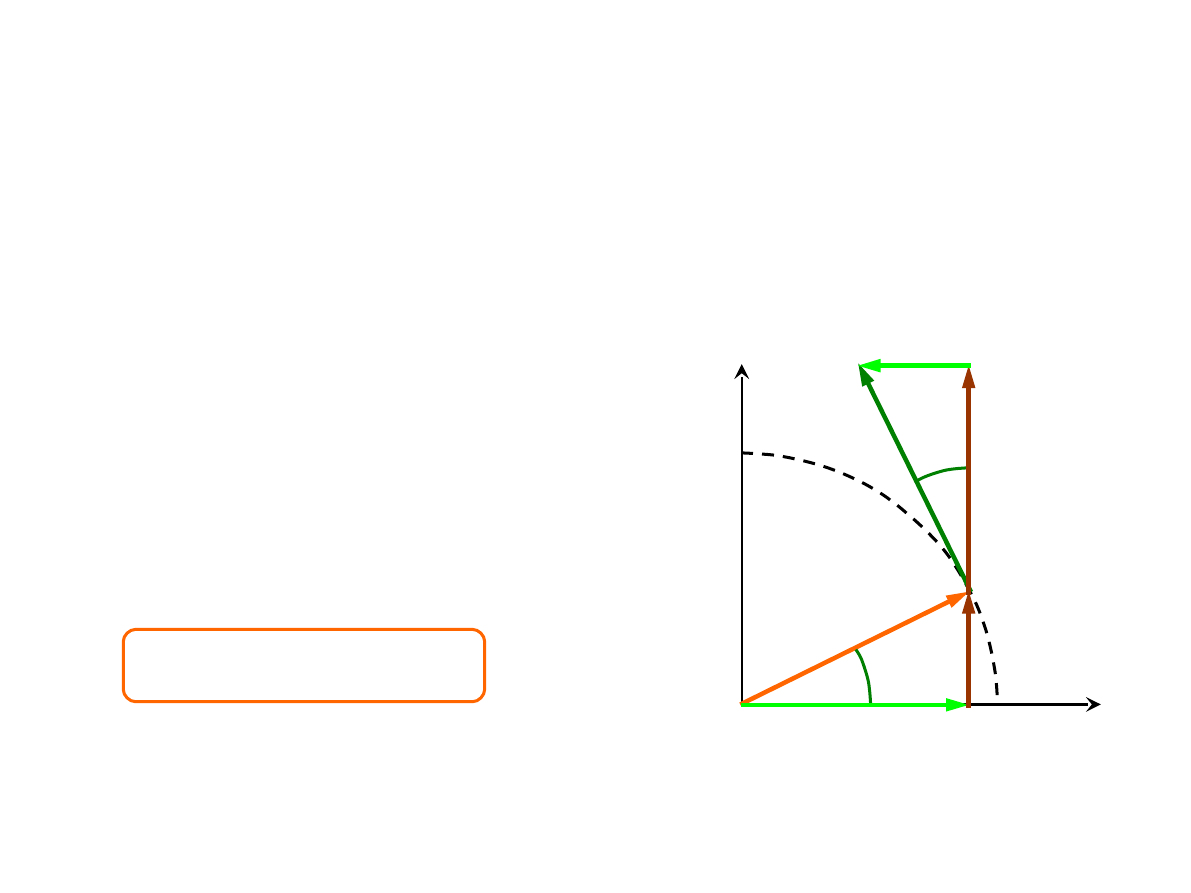
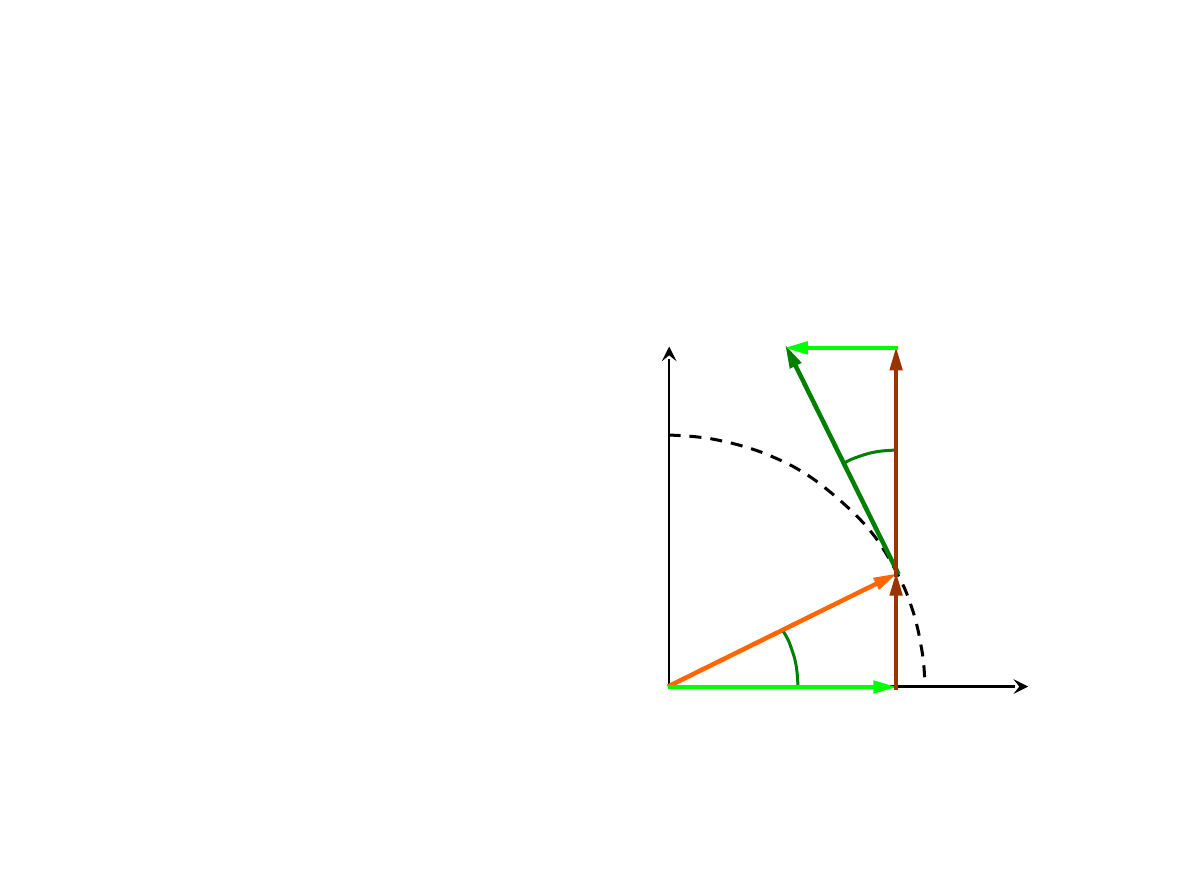
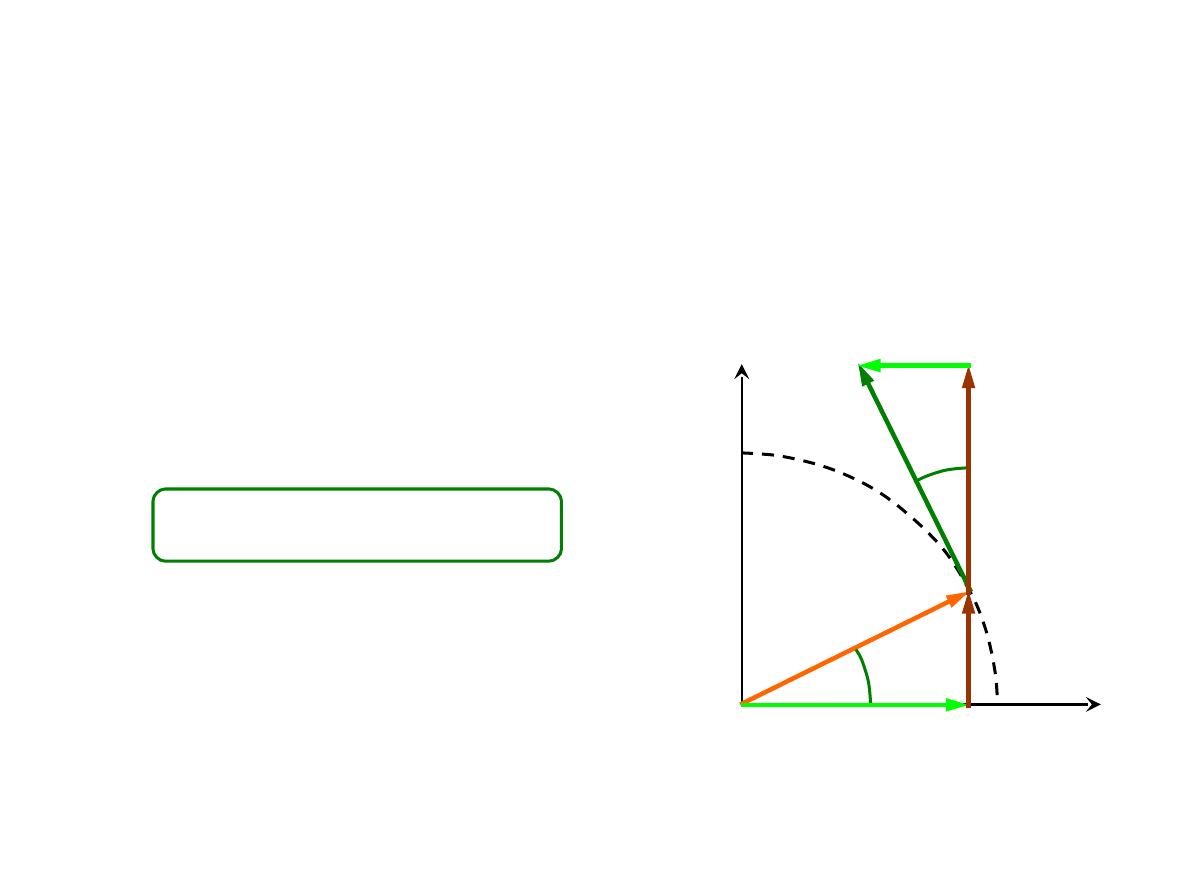
TRANSFORMACJA WEKTORÓW
A
A i
r
r
= �
r r
• Obliczyć należy następujące iloczyny:
• Iloczyn skalarny wektora przez wersor to składowa tego wektora
w kierunku wersora.
• Powyższa cecha iloczynu skalarnego wektorów
pozwala
na
transformację
wektora
z
jednego
układu
współrzędnych
do
drugiego.
Transformacja wektora
z współrzędnych prostokątnych do współrzędnych
cylindrycznych:
z z
A A i
A i
A i
r r
j j
=
+
+
r
r
r
r
x x
y y
z z
A A i
A i
A i
=
+
+
r
r
r
r
A
r
A
A i
j
j
= �
r r
C 01 p
7
TRANSFORMACJA WEKTORÓW (2)
(
)
(
)
(
)
(
)
x x
y y
z z
x x
y
y
z z
A
A i
A i
A i
Ai
i
A i i
A i i
A i i
r
r
r
r
r
r
= � =
+
+
� =
� +
� +
�
r r
r
r
r r
r r
r r
r r
?
x
i i
r
� =
r r
?
z
i i
r
� =
r r
?
y
i i
r
� =
r r
i
r
r
i
j
r
j
x
y
j
1
1
?
?
x
y
i
i
i
r
=
+
r
r
r
C 01 p
8
TRANSFORMACJA WEKTORÓW (3)
(
)
(
)
(
)
(
)
x x
y y
z z
x x
y
y
z z
A
A i
A i
A i
Ai i
A i i
A i i
A i i
r
r
r
r
r
r
= � =
+
+
� =
� +
� +
�
r r
r
r
r r
r r
r r
r r
(cos
sin
) cos
x
x
x
y
i i
i
i
i
r
j
j
j
� = �
+
=
r r
r
r
r
0
z
i i
r
� =
r r
(cos
sin
) sin
y
y
x
y
i i
i
i
i
r
j
j
j
� = �
+
=
r r
r
r
r
cos
sin
x
y
A
A
A
r
j
j
=
+
i
r
r
i
j
r
j
x
y
cos
x
i
j
r
sin
y
i
j
r
j
1
1
C 01 p
9
TRANSFORMACJA WEKTORÓW (4)
(
)
(
)
(
)
(
)
x x
y y
z z
x x
y
y
z z
A
A i
A i
A i
A i
i
A i i
A i i
A i i
j
j
j
j
j
j
= � =
+
+
� =
� +
� +
�
r r
r
r
r r
r r
r r
r r
?
x
i i
j
� =
r r
?
z
i i
j
� =
r r
?
y
i i
j
� =
r r
?
?
x
y
i
i
i
j
=
+
r
r
r
i
r
r
i
j
r
j
x
y
cos
x
i
j
r
sin
y
i
j
r
j
1
1
C 01 p
10
TRANSFORMACJA WEKTORÓW (5)
(
)
(
)
(
)
(
)
x x
y y
z z
x x
y
y
z z
A
A i
A i
A i
A i
i
A i i
A i i
A i i
j
j
j
j
j
j
= � =
+
+
� =
� +
� +
�
r r
r
r
r r
r r
r r
r r
( sin
cos
)
sin
x
x
x
y
i i
i
i
i
j
j
j
j
� = �-
+
=-
r r
r
r
r
0
z
i i
j
� =
r r
( sin
cos
) sin
y
y
x
y
i i
i
i
i
j
j
j
j
� = �-
+
=
r r
r
r
r
( sin )
cos
x
y
A
A
A
j
j
j
=
-
+
cos
sin
0
sin
cos
0
0
0
1
x
y
z
z
A
A
A
A
A
A
r
j
j
j
j
j
� � �
�� �
� � �
�� �
= -
� � �
�� �
�
�
� �
� �
�
�
� �
� �
i
r
r
i
j
r
j
x
y
cos
x
i
j
r
sin
y
i
j
r
j
sin
x
i
j
-
r
cos
y
i
j
r
1
1
C 01 p
11
ANALIZA WEKTORÓW
1
1
1
1
2
3
2
2
2
3
3
3
( , , )
0
( , , )
u
u
u
x
y
z
u u u
u
u
u
J
x y z
x
y
z
u
u
u
x
y
z
�
�
�
�
�
�
�
�
�
�
=
=
�
�
�
�
�
�
�
�
�
�
�
1
1
( , , ),
u
u x y z
=
Operacje różniczkowe wektorowe we współrzędnych
krzywoliniowych
• W przestrzeni trójwymiarowej oprócz układu
współrzędnych
prostokątnych wprowadzamy układ krzywoliniowy za
pomocą
związków klasy C
1
2
2
( , , ),
u
u x y z
=
3
3
( , , )
u
u x y z
=
przy czym powyższy układ jest lokalnie odwracalny
1
2
3
( , , ),
x x u u u
=
1
2
3
( , , ),
y y u u u
=
1
2
3
( , , )
z z u u u
=
co wynika z założenia, że
C 01 p
12
ANALIZA WEKTORÓW
1
1
1
,
,
,
x
y
z
u
u
u
� � �
�
�
�
�
� � �
�
�
• Wektory styczne do linii współrzędnych układu
krzywoliniowego
są następujące:
o długościach (zwanych współczynnikami
Lamégo):
2
2
2
,
,
,
x
y
z
u
u
u
� � �
�
�
�
�
� � �
�
�
3
3
3
,
,
x
y
z
u
u
u
� � �
�
�
�
�
� � �
�
�
2
2
2
1
1
1
1
x
y
z
h
u
u
u
�
�
�
� � � � � �
=
+
+
� � � � � �
�
�
�
� � � � � �
2
2
2
2
2
2
2
x
y
z
h
u
u
u
�
�
�
� � � � � �
=
+
+
� � � � � �
�
�
�
� � � � � �
2
2
2
3
3
3
3
x
y
z
h
u
u
u
�
�
�
� � � � � �
=
+
+
� � � � � �
�
�
�
� � � � � �
C 01 p
13
ANALIZA WEKTORÓW
• Zakładamy, że układ krzywoliniowy jest układem
ortogonalnym
o wektorach jednostkowych (wersorach) wektorów
stycznych
do
linii współrzędnych:
1 2 3
, ,
i i i
r r r
• Elementy skierowane we współrzędnych krzywoliniowych
d ,d
l s
r r
1
1 1
2
2 2
3
3 3
d
d
d
d
l
h ui
h u i
h u i
=
+
+
r
r
r
r
2 3
2
3 1
1 3
1
3 2
1 2
1
2 3
d
d d
d d
d d
s h h u u i
hh u u i
hh u u i
=
+
+
r
r
r
r
• Element objętości we współrzędnych krzywoliniowych
1 2 3
1
2
3
d
d d d
v hh h u u u
=
• Równanie linii sił pola
3
3
1
1
2
2
1
2
3
d
d
d
h u
h u
h u
A
A
A
=
=
gdzie
1 1
2 2
3 3
A Ai
A i
Ai
=
+
+
r
r
r
r
- pole wektorowe
C 01 p
14
TRANSFORMACJE WEKTORÓW
• Wyznaczanie składowych wektora w układzie
współrzędnych
prostokątnych gdy znamy współrzędne wektora w
układzie
współrzędnych krzywoliniowych
1
1
1
2
2
3
3
2
1
1
2
2
3
3
3
1
1
2
2
3
3
1
1
1
1
1
1
1
1
1
x
y
z
x
x
x
A
A
h u
h u
h u
y
y
y
A
A
h u
h u
h u
z
z
z
A
A
h u
h u
h u
�
�
�
�
�
� �
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
=
� �
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
� �
� �
� �
� � �
�
�
�
�
�
�
C 01 p
15
TRANSFORMACJE WEKTORÓW
• Wyznaczanie składowych wektora w układzie
współrzędnych
krzywoliniowych gdy znamy współrzędne wektora w
układzie
współrzędnych prostokątnych
1
1
1
1
1
1
1
2
2
2
2
2
2
2
3
3
3
3
3
3
3
1
1
1
1
1
1
1
1
1
x
y
z
x
y
z
A
A
h u
h u
h u
x
y
z
A
A
h u
h u
h u
x
y
z
A
A
h u
h u
h u
�
�
�
�
�� �
� � �
�
�
�
� � �
� � �
�� �
� �
�
�
�
�
�
=
� �
� � �
�
�
�
� � �
� � �
�� �
� �
�
�
�
�
�� �
� �
� �
� �
�
�
�
�
�
�
�
C 01 p
16
TRANSFORMACJE WEKTORÓW
Transformacja współrzędnych z prostokątnych
(x, y, z)
do cylindrycznych (ρ, φ, z):
cos
sin
x
y
z z
r
j
r
j
=
=
=
2
2
2
2
2
cos
sin
1
x
y
z
h
r
j
j
r
r
r
�
�
�
� � � � � �
=
+
+
=
+
=
� � � � � �
�
�
�
� � � � � �
2
2
2
2
2
2
2
sin
cos
x
y
z
h
j
r
j
r
j
r
j
j
j
�
�
�
� � � � � �
=
+
+
=
+
=
� � � � � �
�
�
�
� � � � � �
2
2
2
1
z
x
y
z
h
z
z
z
�
�
�
� � � � � �
=
+
+
=
� � � � � �
� � � � � �
�
�
�
•
Współczynnikami
Lamégo:
x
y
z
i
r
r
i
r
r
i
j
r
z
i
r
r
r
r
j
i
j
r
z
P
C 01 p
17
TRANSFORMACJE WEKTORÓW
• Wektor we współrzędnych prostokątnych wyrażony
przez
współrzędne wektora w układzie współrzędnych
cylindrycznych
1
1
1
1
1
1
1
1
1
x
z
y
z
z
z
z
x
x
x A
A
h
h
h z
y
y
y
A
A
h
h
h z
z
z
z
A
A
h
h
h z
r
r
j
j
r
j
r
j
r
j
r
j
r
j
�
�
�
�
�� �
� � �
�
�
�
� � �
� � �
�� �
� � �
�
�
�
� � �
=
=
� � �
�
�
�
� � �
� � �
�� �
� � �
�
�
�
� � �
� � �
�� �
� �
�
�
�
�
�
cos
sin
0
sin
cos
0
0
0
1
z
A
A
A
r
j
j
j
j
j
-
�
�� �
�
�� �
�
�� �
�
�� �
�
�� �
1
1
1
1
1
1
1
1
1
x
y
z
z
z
z
z
x
y
z
A
A
h
h
h
x
y
z
A
A
h
h
h
x
y
z
A
A
h z
h z
h z
r
r
r
r
j
j
j
j
r
r
r
j
j
j
�
�
�
�
�
� �
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
� �=
=
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
cos
sin
0
sin
cos
0
0
0
1
x
y
z
A
A
A
j
j
j
j
�
�� �
�
�� �
-
�
�� �
�
�� �
�
�� �
• Wektor we współrzędnych cylindrycznych wyrażony
przez
współrzędne wektora w układzie współrzędnych
prostokątnych
C 01 p
18
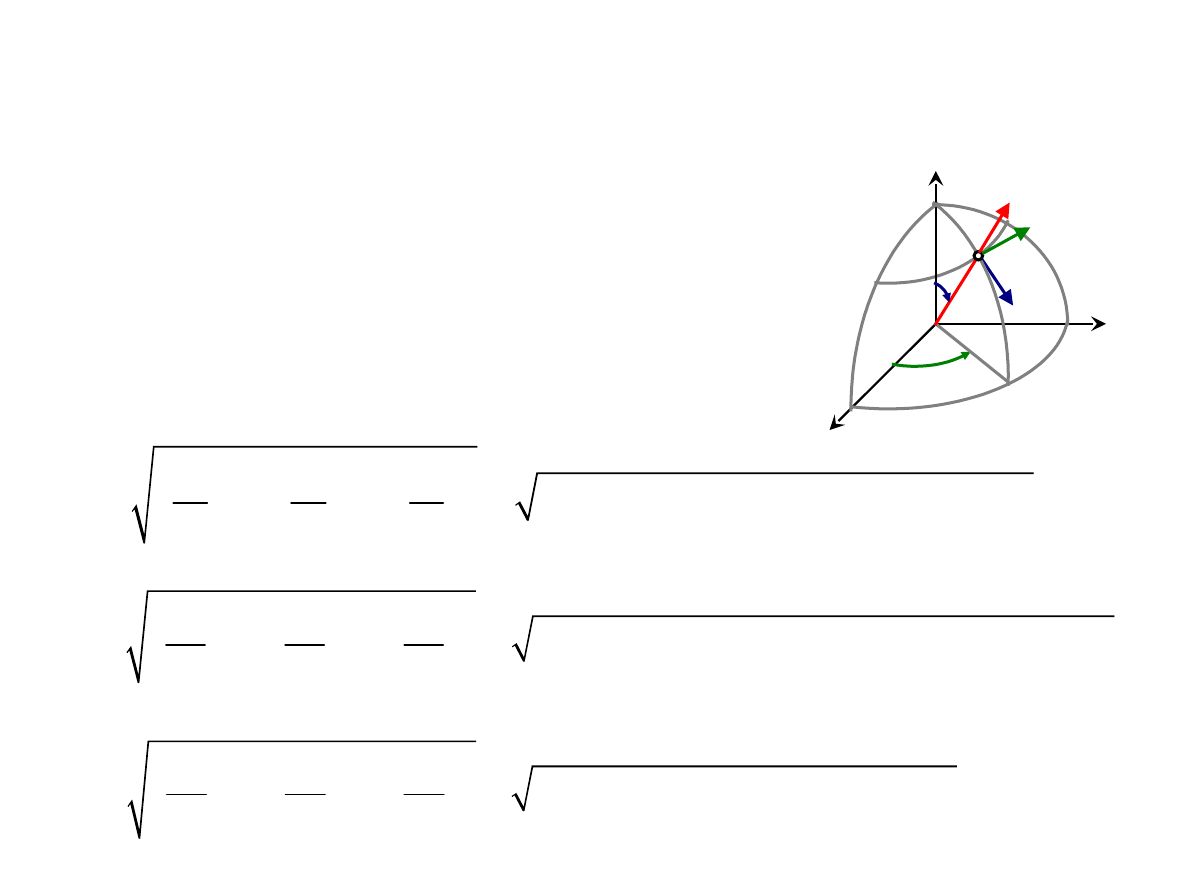
TRANSFORMACJE WEKTORÓW
Transformacja współrzędnych z prostokątnych
(x, y, z)
do sferycznych (r, θ, φ):
sin cos
sin sin
cos
x r
y r
z r
q
j
q
j
q
=
=
=
2
2
2
2
2
2
2
2
sin cos
sin sin
cos
1
r
x
y
z
h
r
r
r
q
j
q
j
q
�
�
�
� � � � � �
=
+
+
=
+
+
=
� � � � � �
� � � � � �
�
�
�
2
2
2
2
2
2
2
2
2
2
2
cos cos
cos sin
sin
x
y
z
h
r
r
r
r
q
q
j
q
j
q
q
q
q
�
�
�
� � � � � �
=
+
+
=
+
+
=
� � � � � �
� � � � � �
�
�
�
•
Współczynnikami
Lamégo:
2
2
2
2
2
2
2
2
2
sin sin
sin cos
sin
x
y
z
h
r
r
r
j
q
j
q
j
q
j
j
j
�
�
�
� � � � � �
=
+
+
=
+
=
� � � � � �
�
�
�
� � � � � �
x
y
z
i
q
r
r
i
r
r
j
i
j
r
q
P

C 01 p
19
TRANSFORMACJE WEKTORÓW
• Wektor we współrzędnych prostokątnych wyrażony
przez
współrzędne wektora w układzie współrzędnych
sferycznych
1
1
1
1
1
1
1
1
1
x
r
r
y
r
z
r
x
x
x
A
A
h r h
h
y
y
y
A
A
h r h
h
z
z
z
A
A
h r h
h
q
j
q
q
j
j
q
j
q
j
q
j
q
j
�
�
�
�
�
� �
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
=
=
� �
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
sin cos
cos cos
sin
sin sin
cos cos
cos
cos
sin
0
r
A
A
A
q
j
q
j
q
j
j
q
j
q
j
j
q
q
-
� �
�
�
� �
�
�
� �
�
�
� �
-
�
�
�
�� �
1
1
1
1
1
1
1
1
1
x
r
r
r
r
y
z
x
y
z
A
A
h r
h r
h r
x
y
z
A
A
h
h
h
x
y
z
A
A
h
h
h
q
q
q
q
j
j
j
j
q
q
q
j
j
j
�
�
�
�
�� �
� � �
�
�
�
� � �
� � �
�� �
� �
�
�
�
�
�
=
=
� �
� � �
�
�
�
� � �
� � �
�� �
� �
�
�
�
�
�� �
� �
� �
� �
�
�
�
�
�
�
�
• Wektor we współrzędnych sferycznych wyrażony przez
współrzędne wektora w układzie współrzędnych
prostokątnych
sin cos
sin sin
cos
cos cos
cos sin
sin
sin
cos
0
x
y
z
A
A
A
q
j
q
j
q
q
j
q
j
q
j
j
�
�� �
�
�� �
-
�
�� �
-
�
�� �
�
�� �
C 01 p
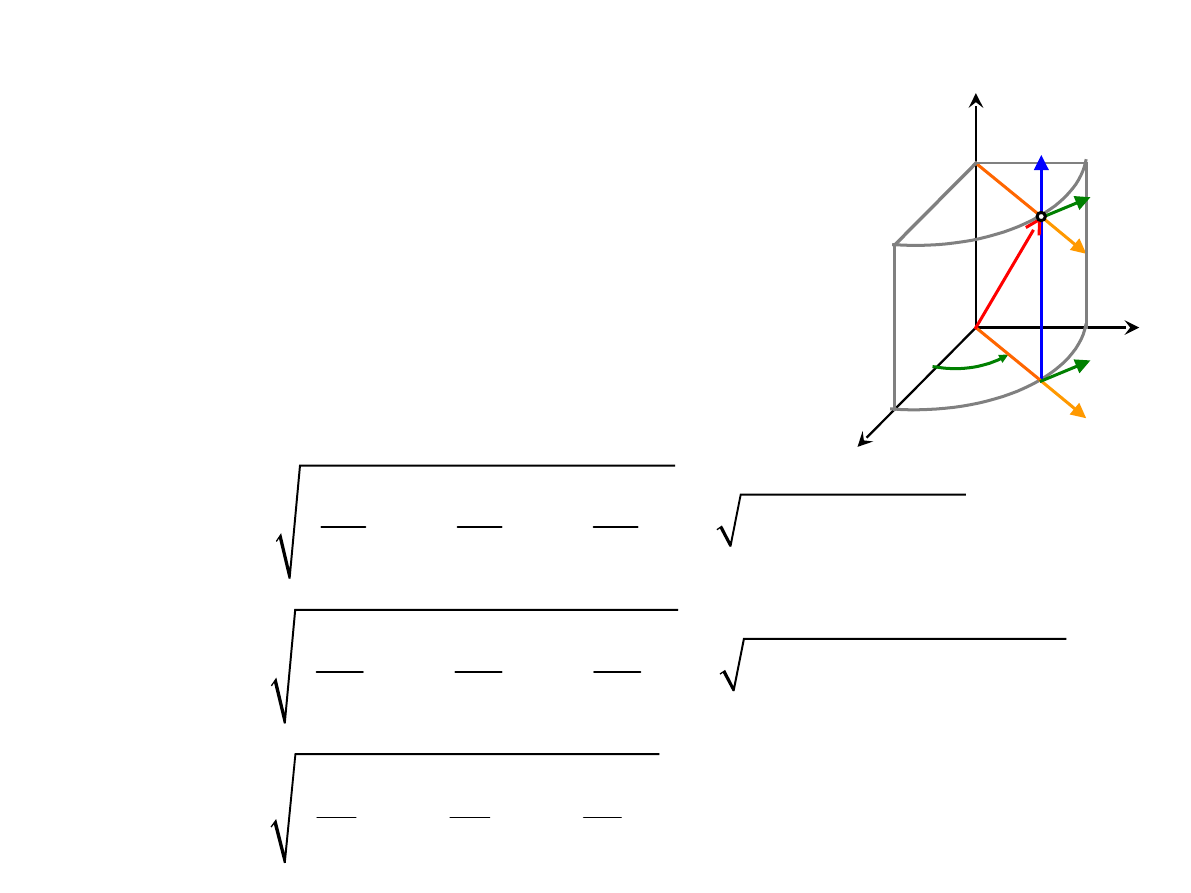
20
TRANSFORMACJE WEKTORÓW
Transformacja współrzędnych z cylindrycznych (ρ,
φ, z) do
sferycznych (r, θ, φ):
sin
cos
r
z r
r
q
j
j
q
=
=
=
2
2
2
2
2
sin
cos
1
r
z
h
r
r
r
r
j
q
q
�
�
�
� � � � � �
=
+
+
=
+
=
� � � � � �
� � � � � �
�
�
�
2
2
2
2
2
2
2
cos
sin
z
h
r
r
r
q
r
j
q
q
q
q
q
�
�
�
� � � � � �
=
+
+
=
+
=
� � � � � �
� � � � � �
�
�
�
•
Współczynnikami
Lamégo:
2
2
2
1
z
h
j
r
j
j
j
j
�
�
�
� � � � � �
=
+
+
=
� � � � � �
�
�
�
� � � � � �

C 01 p
21
TRANSFORMACJE WEKTORÓW
• Wektor we współrzędnych cylindrycznych wyrażony
przez
współrzędne wektora w układzie współrzędnych
sferycznych
1
1
1
1
1
1
1
1
1
r
r
r
z
r
A
A
h r h
h
A
A
h r h
h
z
z
z
A
A
h r h
h
r
q
j
j
q
q
j
j
q
j
r
r
r
q
j
j
j
j
q
j
q
j
�
�
�
�
�
� �
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
� �=
=
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
� �
� �
�
�
� �
� �
�
�
�
�
�
sin
cos
0
0
0
1
cos
sin
0
r
A
A
A
q
j
q
q
q
q
� �
�
�
� �
�
�
� �
�
�
� �
-
�
�
�
�� �
• Wektor we współrzędnych sferycznych wyrażony przez
współrzędne wektora w układzie współrzędnych
cylindrycznych
sin
0 cos
cos
0
sin
0
1
0
z
A
A
A
r
j
q
q
q
q
�
�� �
�
�� �
-
�
�� �
�
�� �
�
�� �
1
1
1
1
1
1
1
1
1
r
z
z
z
z
r
A
A
h
h
h
r
A
A
h
h
h
r
A
A
h z h z h z
r
r
r
r
q
j
j
j
j
j
q
j
r
r
r
q
j
j
j
j
q
j
�
�
�
�
�� �
� � �
�
�
�
� � �
� � �
�� �
� � �
�
�
�
� � �
=
=
� � �
�
�
�
� � �
� � �
�� �
� � �
�
�
�
� � �
� � �
�� �
� �
�
�
�
�
�
C 01 p
22
WEKTORY ZESPOLONE
• Wektor zespolony we współrzędnych
prostokątnych
( , , )
( , , )
( , , )
( , , )
x
x
y
y
z
z
A x y z
A x y z i
A x y z i
A x y z i
=
+
+
r
r
r
r
( )
( )
( )
( )
x
x
y
y
z
z
A r
A r i
A r i
A r i
=
+
+
r
r
r
r
r
r
r
r
lub
przy
czym
{
}
{
}
( ) Re
( )
Im
( )
( )
( ) cos
( ) sin
x
x
x
x
j
x
x
x
x
x
A r
A r
j
A r
A r e
A r
j A r
a
a
a
=
+
=
=
=
+
r
r
r
r
r
r
{
}
{
}
( ) Re
( )
Im
( )
( )
( ) cos
( ) sin
y
y
y
y
j
y
y
y
y
y
A r
A r
j
A r
A r e
A r
j A r
a
a
a
=
+
=
=
=
+
r
r
r
r
r
r
{
}
{
}
( ) Re
( )
Im
( )
( )
( ) cos
( ) sin
z
z
z
z
j
z
z
z
z
z
A r
A r
j
A r
A r e
A r
j A r
a
a
a
=
+
=
=
=
+
r
r
r
r
r
r
C 01 p
23
WEKTORY ZESPOLONE (2)
• Wektory zespolone nie mają sensu fizycznego i nie
należy
przypisywać im własności geometrycznych.
• Działania na wektorach zespolonych definiuje się tak jak
na
wektorach rzeczywistych, przy czym w wyniku tam gdzie
mamy
kwadrat jednostki urojonej należy wstawić minus
jedność.
• Wektor zespolony spełnia
zależności:
( )
( )
( )
A r
A r A r
*
=
�
r
r
r
r
r
r
{
}
( )
( )
A( ) Re ( )
2
A r
A r
r
A r
*
+
=
=
r
r
r
r
r
r
r
r
• Aby poznać własności fizyczne i geometryczne pól
należy
zawsze wyznaczyć wektory rzeczywiste.

C 01 p
24
WEKTORY ZESPOLONE (3)
• Obliczmy iloczyn wektorowy następujących wektorów
zespolonych:
C
r
( ) (
)
(
)
x
y
A r
x jy i
y jx i
= +
+ +
r
r
r
r
( ) (
)
(
)
x
y
B r
y jx i
x jy i
= -
+ +
r
r
r
r
?
C A B
= � =
r
r r
• Rzeczywisty wektor
:
{ }
C Re
?
C
=
=
r
r

C 01 p
25
WEKTORY ZESPOLONE (4)
• Obliczmy iloczyn wektorowy następujących wektorów
zespolonych:
C
r
( ) (
)
(
)
x
y
A r
x jy i
y jx i
= +
+ +
r
r
r
r
( ) (
)
(
)
x
y
B r
y jx i
x jy i
= -
+ +
r
r
r
r
2
2
2
2
2
(
2
)
( 2
2 )
z
z
x
j xy y
y
x i
y
j xy i
=
+
-
-
-
= -
+
r
r
(
)
2
0
(
)(
)
0
x
y
z
z
i
i
i
C A B
x jy y jx
x jy
y jx y jx i
y jx x jy
�
�
�
� �
�
= � = +
+
=
+
-
+
-
�
� �
�
�
�
-
+
�
�
r
r
r
r
r r
r
• Rzeczywisty wektor
:
{ }
2
C Re
2
z
C
y i
=
=-
r
r
r

C 01 p
26
WEKTORY ZESPOLONE (5)
• Dany jest wektor
zespolony:
(
)
(
)
(1
)
j t
z
j t
z
x
y
A
j i e
ji e
w b
w b
-
-
= +
+
r
r
r
?
z
B i
A
= � =
r
r r
• Obliczmy wektory:
?
C A B
*
= � =
r
r r

C 01 p
27
WEKTORY ZESPOLONE (6)
• Dany jest wektor
zespolony:
(
)
(
)
(1
)
j t
z
j t
z
x
y
A
j i e
ji e
w b
w b
-
-
= +
+
r
r
r
z
B i
A
= �
r
r r
(
)
(
)
(
)
2
2
1
0
1
3
1
0
x
y
z
j t
z
j t
z
z
z
i
i
i
C A B
e
e
j
j
j
j i
i
j
j
w b
w b
*
-
-
-
�
�
�
�
= � =
+
= -
-
=
�
�
�
�
-
�
�
r
r
r
r
r r
r
r
• Obliczmy wektory:
C A B
*
= �
r
r r
(
)
(
)
0
0 1
(1
)
1
0
x
y
z
j t
z
j t
z
z
x
y
i
i
i
B i
A e
ji
j i e
j
j
w b
w b
-
-
�
�
�
� �
�
= � =
= -
+ +
�
�
�
�
�
�
+
�
�
r
r
r
r
r r
r
r
(
)
(1
)
j t
z
x
y
B
ji
j i e
w b
*
-
-
�
�
=
+ -
�
�
r
r
r

C 01 p
28
WEKTORY ZESPOLONE (7)
• Wyznaczmy wektory rzeczywiste
odpowiadające
wektorom zespolonym:
(
)
(
)
(1
)
j t
z
j t
z
x
y
A
j e
i
je
i
w b
w b
-
-
= +
+
r
r
r
(
)
(
)
(1
)
j t
z
j t
z
x
y
B
je
i
j e
i
w b
w b
-
-
=-
+ +
r
r
r
A, B
r r
A Re{ } ?
A
=
=
r
r
B Re{ } ?
B
=
=
r
r
C 01 p
29
WEKTORY ZESPOLONE (8)
• Wyznaczmy wektory rzeczywiste
odpowiadające
wektorom zespolonym:
(
)
(
)
(1
)
j t
z
j t
z
x
y
A
j e
i
je
i
w b
w b
-
-
= +
+
r
r
r
(
)
(
)
(1
)
j t
z
j t
z
x
y
B
je
i
j e
i
w b
w b
-
-
=-
+ +
r
r
r
A, B
r r
(
/4)
(
/2)
2
j t
z
j t
z
x
y
A
e
i
e
i
w b p
w b p
-
+
-
+
=
+
r
r
r
2cos(
/4)
2sin(
/4)
x
A
t
z
j
t
z
i
w b
p
w b
p
�
�
=
-
+
+
-
+
�
�
r
r
[
]
cos(
/2)
sin(
/2)
y
t
z
j
t
z
i
w b
p
w b
p
+
-
+
+
-
+
r
A Re{ }
2cos(
/4)
cos(
/2)
x
y
A
t
z
i
t
z
i
w b
p
w b
p
=
=
-
+
+
-
+
r
r
r
r
B Re{ } cos(
/ 2)
2cos(
/4)
x
y
B
t
z
i
t
z
i
w b
p
w b
p
=
=
-
-
+
-
+
r
r
r
r
C 01 p
30
OPERATORY RÓŻNICZKOWE
A
A
div
Operatory różniczkowe:
gradient
dywergencja
rotacja
laplasjan skalarny
laplasjan wektorowy
A
A
rot
A
A
A
A
)
(
2
x
y
z
i
i
i
x
y
z
�
�
�
Ѻ
+
+
�
�
�
r
r
r
;
x
y
z
r xi
yi
zi
=
+
+
r
r
r
r
( )
( , , )
U U r
U x y z
�
�
r
gdzie
- skalarna funkcja położenia
( )
( , , )
A A r
A x y z
�
�
r
r
r
r
- wektorowa funkcja położenia
( , , )
( , , )
( , , )
( , , )
x
x
y
y
z
z
A x y z
A x y z i
A x y z i
A x y z i
=
+
+
r
r
r
r
Operator nabla:
2
2
2
2
2
2
2
x
y
y
�
�
�
D=Ѻ��Ѻ++
�
�
�
Operator Laplace’a:
grad U
U
��
2
(
)
(
)
U
U
U
U
D �� = ��
� =���
C 01 p
31
OPERATORY RÓŻNICZKOWE - GRADIENT
Gradient w kartezjańskich współrzędnych
prostokątnych
x
y
z
U
U
U
U
i
i
i
x
y
z
�
�
�
� =
+
+
�
�
�
r
r
r
Gradient we współrzędnych
cylindrycznych
1
z
U
U
U
U
i
i
i
z
r
j
r
r j
�
�
�
� =
+
+
�
�
�
r
r
r
Gradient we współrzędnych
sferycznych
1
1
sin
r
U
U
U
U
i
i
i
r
r
r
q
j
q
q j
�
�
�
� =
+
+
�
�
�
r
r
r
C 01 p
32
STRUMIEŃ WIELKOŚCI WEKTOROWEJ
S
q
ds
A
r
d
d
s n s
=
r r
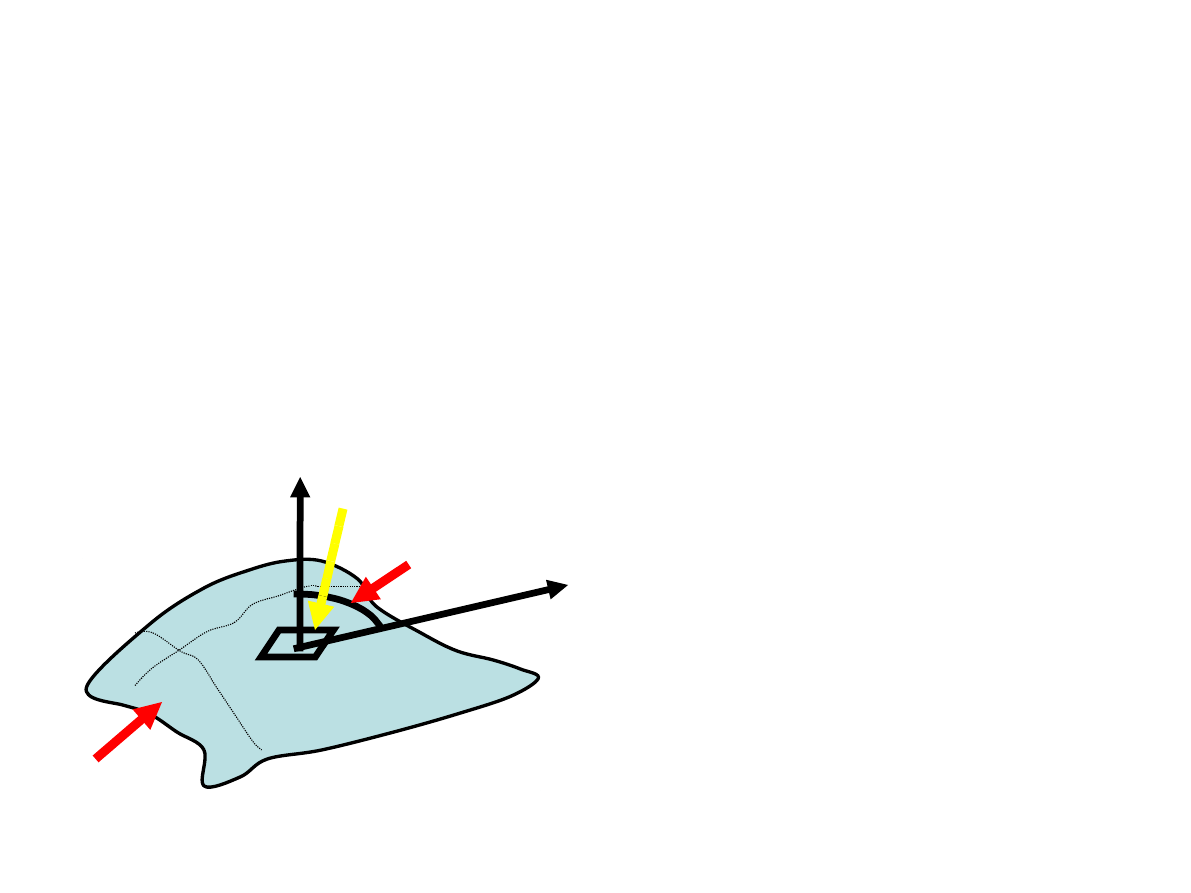
• Elementarny strumień wielkości wektorowej
przez
element powierzchni reprezentowanej przez
wektor
(normalny do powierzchni i skierowany na zewnątrz
zamkniętej powierzchni) jest równy
iloczynowi
składowej
normalnej wektora przez pole powierzchni
A
r
ds
ds
r
dF
A
r
ds
d
d
d
d
n
A s A n s A s
F = � = � =
r
r
r
r
• Strumień wektora
przez
powierzchnię
S
:
F
A
r
d
S
A s
F =
�
�
�
r r

C 01 p
33
OPERATORY RÓŻNICZKOWE – DYWERGENCJA
0
d
lim
S
V
A s
A
V
�
�
�� =
�
�
r r
r
�
Dywergencję wektora , w oparciu o twierdzenie
Gaussa
d
S
A s
�
�
�
r r
�
przy
czym
- strumień wektora wypływający z
obszaru
o objętości V
A
r
S - powierzchnia zamknięta ograniczająca objętość V
A
r
• Jeżeli w punkcie przestrzeni znajduje się skalarne źródło pola ,
to dywergencja jest różna od zera.
A
r
• Pole wektorowe, którego dywergencja jest różna od
zera,
jest
polem źródłowym
.
• Pole wektorowe o zerowej dywergencji jest
polem
bezźródłowym
albo
solenoidalnym
.
możemy przedstawić
jako:
d
d ,
V
S
A V
A s
��
=
�
�
�
�
�
�
r
r r
�
0
A
�
r
0
A
�� =
r
C 01 p
34
OPERATORY RÓŻNICZKOWE – DYWERGENCJA (2)
Dywergencja w kartezjańskich współrzędnych
prostokątnych
y
x
z
x
y
z
A
A
A
A
A
A
A i
i
i
x
y
z
x
y
z
�
�
�
�
�
�
�� =
+
+
=
+
+
�
�
�
�
�
�
r
r
r
r r
r
r
Dywergencja we współrzędnych
cylindrycznych
(
)
1
1
z
A
A
A
A
z
r
j
r
r
r
r j
�
�
�
�� =
+
+
�
�
�
r
Dywergencja we współrzędnych
sferycznych
(
)
2
2
(sin
)
1
1
1
sin
sin
r
A
r A
A
A
r
r
r
r
j
q
q
q
q
q j
�
�
�
�� =
+
+
�
�
�
r
C 01 p
35
CYRKULACJA (KRĄŻENIE) POLA WEKTOROWEGO
A
r
A
r
A
r
t
A
r
L
A
r
d
d
t
L
L
C
A l
A l
=
� =
�
�
r
r
�
�
• Niech będzie dowolnym polem wektorowym, a
dl
r
niech będzie styczną
do
krzywej
wtedy całkę
krzywoliniową
L
dl
r
dl
r
dl
r
cyrkulacją pola wektorowego po krzywej
zamkniętej.
nazywamy
C 01 p
36
OPERATORY RÓŻNICZKOWE – ROTACJA
0
d
(
)
lim
L
S
A l
A n
S
�
�
Ѵ�=
�
r
r
r r
�
Rotację wektora , w oparciu o twierdzenie
Stokesa
d
L
A l
�
�
r
r
�
przy
czym
- cyrkulacja pola wektorowego po
zamkniętej
dodatnio zorientowanej krzywej L
A
r
S - powierzchnia płaska
A
r
• Jeżeli rotacja pola wektorowego w określonym obszarze
jest
różna od zera
, to pole nazywa się
wirowym
.
• Pole wektorowe, którego rotacja jest
równa zero
w danym obszarze,
jest polem
bezwirowym
lub
potencjalnym
.
L – linia zamknięta będąca brzegiem
powierzchni S
możemy przedstawić w postaci:
(
) d
d
S
L
A n s
A l
Ѵ�=�
�
�
�
r
r
r
r
�
- wersor normalny do powierzchni
płaskiej S
n
r
0
A
�Ѵ�
r r
0
A
�Ѵ=
r r
C 01 p
37
OPERATORY RÓŻNICZKOWE – ROTACJA (2)
Rotacja w kartezjańskich współrzędnych
prostokątnych
Rotacja we
współrzędnych
cylindrycznych
Rotacja we
współrzędnych
sferycznych
x
y
z
y
y
x
x
z
z
x
y
z
x
y
z
i
i
i
A
A
A
A
A
A
A
i
i
i
x
y
z
y
z
z
x
x
y
A
A
A
�
�
�
�
�
�
�
�
�
�
� � �
�
�
Ѵ
=
=
-
+
-
+
-
�
�
�
�
�
�
� � �
�
�
�
�
�
�
�
�
�
�
�
�
r
r
r
r
r
r
r
z
z
i
i
i
A
z
A
A
A
r
j
r
j
r
r
r
j
r
�
�
�
Ѵ
=
�
�
�
r
r
r
r
2
sin
sin
sin
r
r
i
i
i
r
r
r
A
r
A
rA
r
A
j
q
q
j
q
q
q
j
q
�
�
�
Ѵ
=
�
�
�
r
r
r
r
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
Wyszukiwarka
Podobne podstrony:
Materialy pomocnicze prezentacja maturalna
Materialy pomocnicze do cwiczen Statystyka cz I
obciazenia wiatr snieg materiały pomocnicze z budownictwa ogólnego
Materiał pomocniczy, Szkoła, wypracowania, ściągi
sciaga z ESP, Uczelnia, Technologia budowy maszyn, Materiały pomocnicze
Materiały pomocne przy nauce podsumowanie powyższych wykładów wersja mini
Materialy pomocnicze cardan AG Nieznany
Materialy pomocnicze 4 id 28534 Nieznany
Ciania PKM, Materiały pomocnicze do projektowania
Kruszarka Jednowalcowa, Uczelnia, Technologia budowy maszyn, Materiały pomocnicze
A.Materiały pomocnicze, BMR, Broń Jądrowa
Motyw dziecka, Materiały pomocnicze, Motywy literackie
Materialy, MBM PWR, Materiałoznawstwo, Materiały pomocnicze
cwiczenie nr 1 materialy pomocn Nieznany
cwiczenie nr 3 materialy pomocn Nieznany
Materiały pomocnicze LAB1
Materialy pomocnicze do testu II Gospodarka finansowa zakl
więcej podobnych podstron