
Systemy
transportowe II
WYKŁAD 5
Odwzorowaniem
przemieszczania
ładunków
i
(lub)
osób
w
systemie
transportowym jest
POTOK RUCHU
,
który przepływa przez węzły i łuki w sieci o
strukturze grafu G = <W, L>.
Ładunki i (lub) osoby przewożone są w
pojazdach, wielkość potoku ruchu wyrażamy
zatem
liczbą pojazdów na jednostkę czasu
liczbą jednostek potoku ruchu na
jednostkę czasu.
systemy transportowe II – W5 J.
Żak
2
Potok ruchu można
przedstawić w dwóch
aspektach:
jako potok ruchu na
drodze;
jako potok ruchu w sieci.
systemy transportowe II – W5 J.
Żak
3
Potok ruchu na drodze
Analizując potok ruchu na drodze, na
potrzeby modelowania ST, ograniczymy się
do ustalenia wybranych charakterystyk:
Intensywności potoku ruchu,
Gęstości potoku ruchu,
Prędkości potoku ruchu,
Czasu przemieszczania się potoku ruchu,
Równomierności potoku ruchu,
Struktury potoku ruchu.
systemy transportowe II – W5 J.
Żak
4
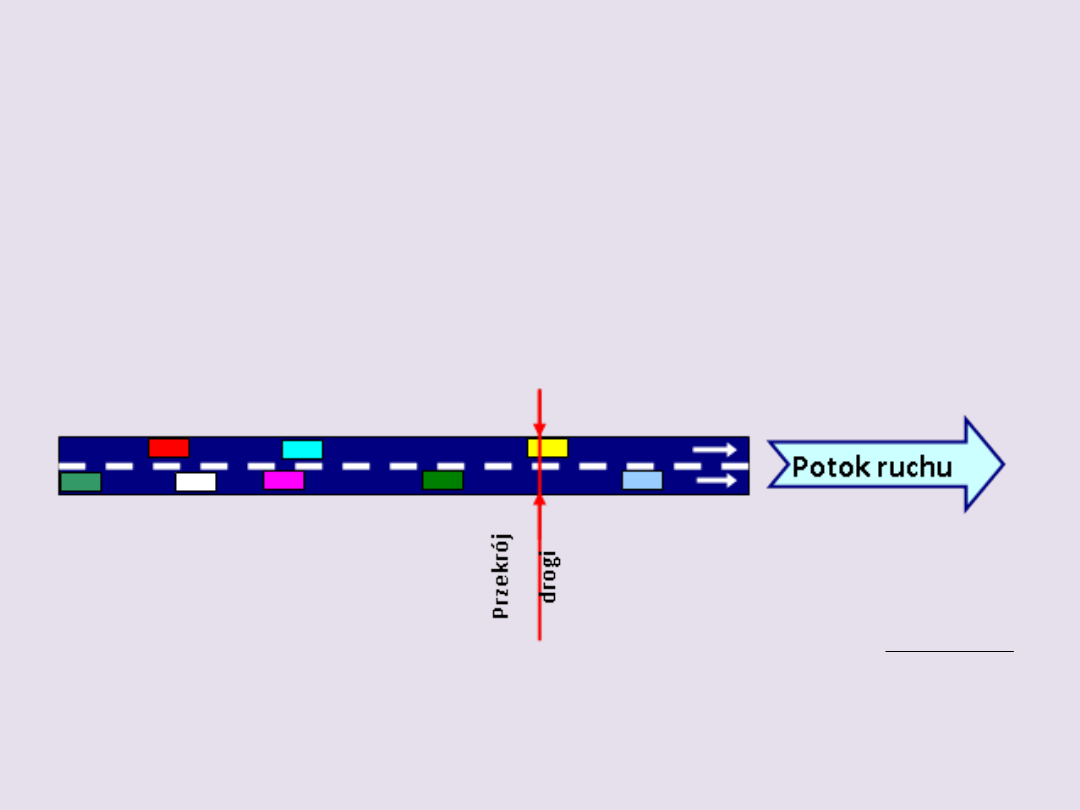
INTENSYWNOŚĆ
(NATĘŻENIE) POTOKU
RUCHU
Intensywność (natężenie) potoku ruchu
- x
, to liczba pojazdów przechodzących
przez przekrój drogi w jednostce czasu.
systemy transportowe II – W5 J.
Żak
5
�
�
�
�
�
�
pojazdów
J EDNOSTKA -
godz.
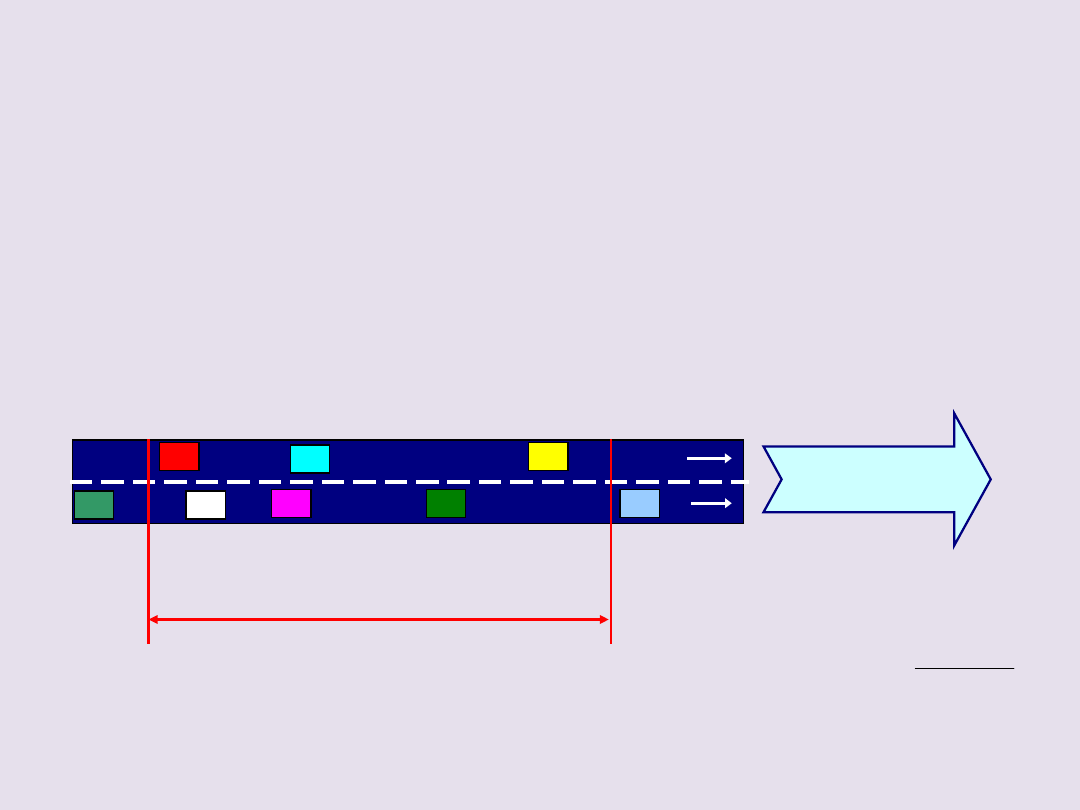
GĘSTOŚĆ POTOKU
RUCHU
Gęstość potoku ruchu - w
, to liczba pojazdów
przypadająca na jednostkę długości drogi
w określonej chwili.
systemy transportowe II – W5 J.
Żak
6
Odcinek drogi
Potok ruchu
km
pojazdów
JEDNOSTKA

PRĘDKOŚĆ RUCHU
prędkość ruchu - v:
systemy transportowe II – W5 J.
Żak
7
km
pojazdów
JEDNOSTKA
w
x
v
Omówione charakterystyki możemy
rozpatrywać jako :
średnie,
minimalne,
maksymalne.

CZAS JAZDY
czas jazdy - �
systemy transportowe II – W5 J.
Żak
8
Czas jazdy może być rozpatrywany w
układzie:
a) pojedynczy pojazd na drodze,
b) potok ruchu na drodze.
Zakładamy, że:
�
m
- minimalny czas jazdy konieczny na
pokonanie drogi;
�
s
- średni czas konieczny na pokonanie drogi
przez przeciętny pojazd.
Zachodzi przy tym nierówność:
�
m
�
s
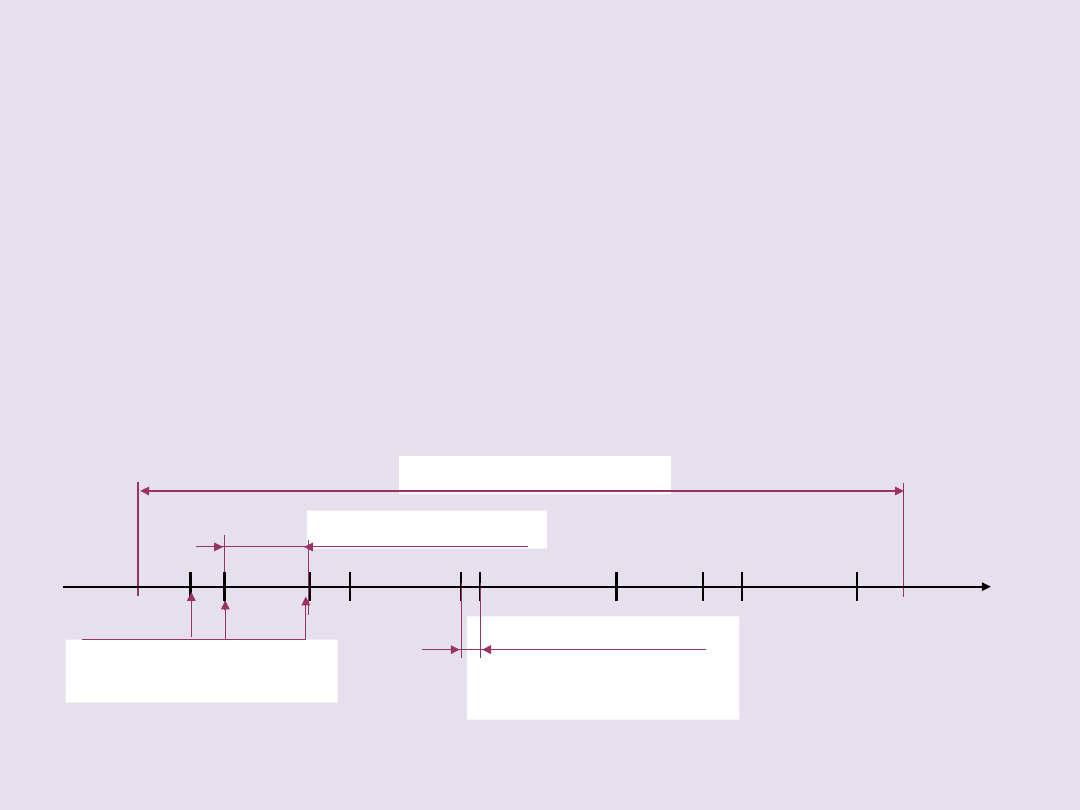
RÓWNOMIERNOŚĆ
POTOKU RUCHU
Równomierność potoku ruchu - �:
liczona
jako iloraz minimalnego czasu następstwa
pojazdów do średniego czasu ich następstwa
w wybranym przedziale czasu obserwacji, tj.:
systemy transportowe II – W5 J.
Żak
9
czas następstwa
czas obserwacji
minimalny czas
następstwa
chwile zgłoszeń
pojazdów
STRUKTURA POTOKU
RUCHU
Struktura potoku ruchu
- to
charakterystyka potoku ruchu
wyrażona w % opisującą procentowy
udział pojazdów określonego typu
(klasy) w całym potoku ruchu, np.:
•
30% - jednoślady;
•
67% - samochody osobowe;
•
3% - samochody ciężarowe
systemy transportowe II – W5 J.
Żak
10
Najczęściej używanym opisem
(modelem) potoku ruchu w układzie
POJAZD - DROGA
jest
MODEL CZASU
NASTĘPSTWA
w postaci wartości
ustalonej (
RÓWNOODSTĘPOWY
POTOK
), zmiennej losowej, lub też
rozkładu tej zmiennej losowej w postaci
jej dystrybuanty.
Dla
POTOKU WIELOWYMIAROWEGO
czas następstwa zgłoszeń może być
wielowymiarową dystrybuantą.
systemy transportowe II – W5 J.
Żak
11
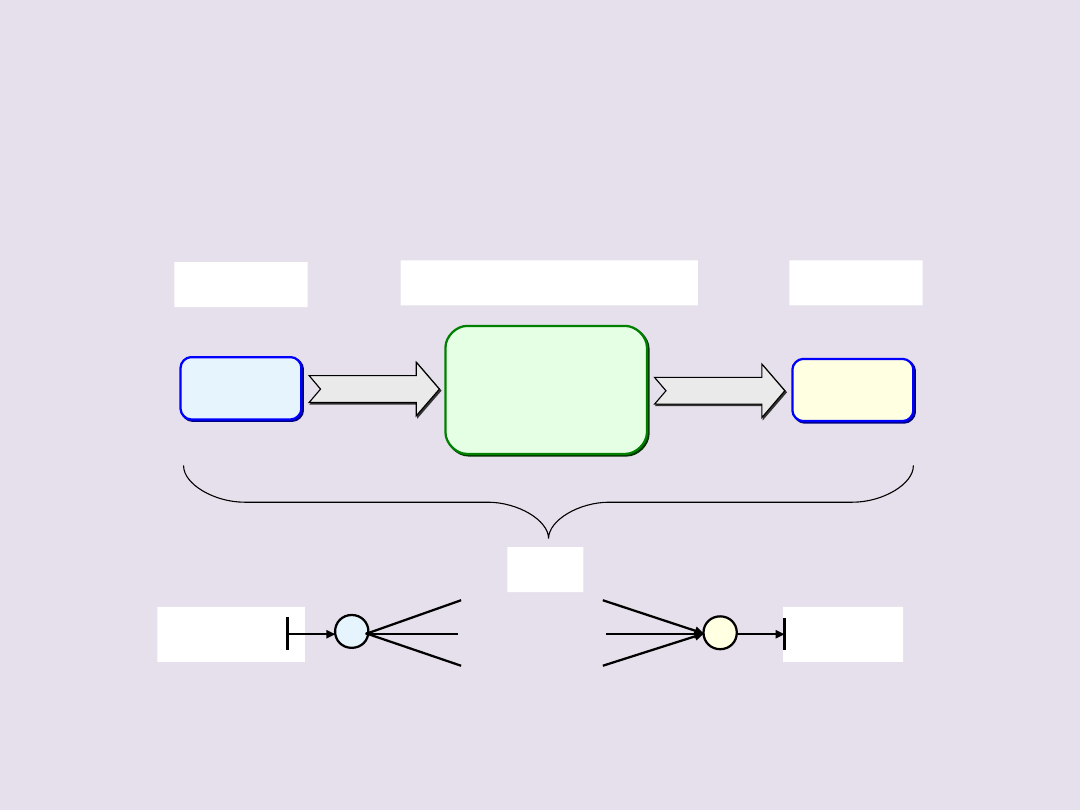
POTOK RUCHU W SIECI
TRANSPORTOWEJ
ST
jest systemem
otwartym
. Powiązanie
systemu z otoczeniem dokonywane jest
poprzez
punkty styku systemu i otoczenia
.
Zakładamy przy tym, że odwzorowaniem
ODDZIAŁYWANIA OTOCZENIA
na ST jest
potok ruchu
pojawiający się na
WEJŚCIACH
do sieci, natomiast odwzorowaniem
oddziaływania ST na
OTOCZENIE
jest potok
ruchu pojawiający się na
WYJŚCIACH
z sieci.
systemy transportowe II – W5 J.
Żak
12

Węzeł w którym powstaje
zapotrzebowanie na potok ruchu
będziemy nazywać
ŹRÓDŁEM
potoku
ruchu. Natomiast węzeł, w którym
zanika potok ruchu będziemy nazywać
UJŚCIEM
potoku ruchu. Źródła i ujścia
opisują
powiązania ST z otoczeniem
.
Oznacza to, że:
źródła są wejściami do ST,
ujścia są wyjściami z ST
systemy transportowe II – W5 J.
Żak
13
Wydajność
źródeł i chłonność ujść
będziemy interpretować jako
ZAPOTRZEBOWANIE OTOCZENIA SYSTEMU
TRANSPORTOWEGO NA PRZEWÓZ
(
ZNP
).
systemy transportowe II – W5 J.
Żak
14
Zapotrzebowaniem na przewóz
(ZNP) nazywamy potok ruchu,
który należy przeprowadzić
przez sieć transportową ze
źródła do ujścia potoku. Para
źródło - ujście jest relacją
przewozu dla tego potoku
ruchu.
Potok ruchu przepływający
przez sieć transportową
powiązany jest z:
a) punktami styku systemu
transportowego z otoczeniem;
b) relacjami przewozu;
c) drogami przejścia potoku ruchu
przez sieć transportową.
systemy transportowe II – W5 J.
Żak
15
systemy transportowe II – W5 J.
Żak
16
A
A
B
B
V
V
W
ŹRÓDŁ
A
UJŚCIA
WĘZŁY
POŚREDNIE
POCZĄTEK
PRZEWOZ
U
i=a
a-te
źród
ło
j=b
b-te
ujści
e
KONIEC
PRZEW
OZU
Dekompozycja zbioru węzłów struktury
ST

RELACJA PRZEWOZU
Relacją przewozu nazywamy parę (a, b),
w której pierwszy element nazywamy
początkiem relacji, a drugi element – jej
końcem ; a∈A, b ∈ A;
(a,b - numer (nazwa) węzła)
Relacja przewozu jest podzbiorem iloczynu
kartezjańskiego. Stąd, jeśli przez E
oznaczymy zbiór relacji przewozu w badanej
sieci transportowej
EAB={(a ,b): aA, bB}
systemy transportowe II – W5 J.
Żak
17
systemy transportowe II – W5 J.
Żak
18
W przypadku sieci transportowych
wymaga
się,
aby
węzeł
b
był
OSIĄGALNY
z węzła a. Zakładamy,
zatem,
że
graf
G,
będący
odwzorowaniem
struktury
sieci
transportowej ma własność spójności w
sensie dróg. Wymaga się zatem aby
sieć transportowa była spójna w sensie
relacji przewozu.
Struktura G jest spójna dla zbioru
relacji przewozu E, gdy dla każdej pary
(a,b)∈E zbiór P
ab
≠Ø, tzn. istnieje co
najmniej jedna droga łącząca węzeł a z
węzłem b.
ab
a,b
P
E
)
(
Ø

systemy transportowe II – W5 J.
Żak
19
p,ab
ij
x
Rozszerzając
wcześniej
przyjęte
oznaczenia
na
sieć
transportową, przyjmujemy następującą notację oznaczeń:
•[x
ij
] – macierz potoku ruchu przemieszczanego po łukach (i,
j), (i, j)∈L należących do sieci transportowej, czyli macierz
rozłożenia potoku ruchu w sieci transportowej o strukturze G
= <W, L>; w modelu rozłożenia potoku ruchu jest to
macierz zmiennych decyzyjnych modelu;
•[ ] – macierz wartości liczbowych opisujących ustalone
rozłożenie potoku ruchu w sieci transportowej; są to wartości
otrzymane w wyniku rozwiązania zadania rozłożenia potoku
ruchu w sieci transportowej;
•[x
ab
] – macierz zapotrzebowania na przewóz (ZNP),
określająca wymaganą wielkość potoku do przeprowadzenia
przez sieć transportową dla zbioru relacji przewozu – E, z
węzła a do węzła b (a∈A, b∈B);
•
– składowa potoku ruchu w relacji (a, b),
przemieszczanego p-tą drogą po łuku (i,j)∈L (a∈A,
b∈B; p∈P
ab
).
ij
x
Warunki nakładane na potok ruchu
przemieszczany po elementach
struktury sieci transportowej
Zbiór dróg łączących źródło a z ujściem b
i zawierających łuk (i,j)
systemy transportowe II – W5 J.
Żak
20
L
L
p
a,b
i,j
:
p
=
E,
p
L
ab
P
ab
ij
P
)
}
)
(
(
{
Wielkość
potoku ruchu przemieszczanego łukiem (i, j)
będzie sumą potoku ruchu przemieszczanego po drogach p
należących do różnych relacji (a, b) i zawierających łuk (i, j),
co zapisujemy:
ab
p
p
b
a
,
)
,
(
ab
ij
P
E
x
ij
x =
=

WARUNEK NIEUJEMNOŚCI
POTOKU RUCHU (NP.)
a) dla łuków sieci transportowej:
b) dla dróg w sieci transportowej:
c) dla składowych potoku ruchu:
systemy transportowe II – W5 J.
Żak
21
0
L
)
(
ij
x
i,j
0
)
(
,
ab
x
P
E
ab
p
p
a,b
0
)
,
(
)
(
,
ab
ab
p
j
i
p
a,b
ij
x
L
P
E

WARUNEK
ADDYTYWNOŚCI POTOKU
RUCHU (AP)
systemy transportowe II – W5 J.
Żak
22
E
P
x
x
)
,
(
,
)
,
(
b
a
p
ij
ab
p
ij
ab
j
i
L
Wykonalność operacji dodawania
na składowych potoku ruchu
nazywamy warunkiem
addytywności
WARUNEK ZACHOWANIA
POTOKU RUCHU (ZP)
dla węzłów pośrednich:
systemy transportowe II – W5 J.
Żak
23
)
(
i
1
i
Γ
Γ
k
ik
j
ji
i
x
x
V
0
dla źródeł potoku
ruchu
)
(
i
1
i
Γ
Γ
k
ik
j
ji
i
x
x
A
- x
ab
i
ab
ik
k
i
x
x
�G
�
=-
"
�
A
1
i
Γ
-
=�

systemy transportowe II – W5 J.
Żak
24
dla ujść potoku
ruchu
)
(
i
1
i
Γ
Γ
k
ik
j
ji
i
x
x
B
x
ab
ab
j
ji
x
i
1
i
Γ
x
B
B
V
A
i
dla
x
i
dla
i
dla
x
i
ab
ab
k
ik
j
ji
0
)
x
x
(
i
1
i
Γ
Γ
W
Uogólniając dla danej relacji przewozu (a,b) równanie
zachowania potoku ruchu w sieci transportowej ma postać

systemy transportowe II – W5 J.
Żak
25
systemy transportowe II – W5 J.
Żak
26
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
Wyszukiwarka
Podobne podstrony:
systemy transportowe II (1)
systemy transportowe II (3)
systemy transportowe II (2)
Systemy transportowe II projekt 2, Systemy transportowe II
systemy transportowe II (4)
systemy transportowe, Systemy transportowe II
Bezpieczeństwo systemów transportowych - zagadnienia, PG, PG sem. II mgr, Bezpieczeństwo systemów tr
Miernictwo i systemy pomiarowe II LAB
Infrastruktura transportu II w5
Montwiłł Węzły transportowe w europejskim systemie transportu
Laboratorium Systemy operacyjne II lista 3
SYSTEMY TRANSPOROWE word
wrocław systemy transportowe
zal systemy transportowe
systemy sciaga, systemy transportowe
systemy konspekt Ewa Dadacz, systemy klasa II
Dyski twarde-woluminy, Szkoła, Systemy Operacyjnie i sieci komputerowe, systemy, semestr II
Relacje miedzy zagospodarowaniem przestrzennym a systemem transportowym, Studia, Sem 5, SEM 5 (wersj
więcej podobnych podstron