Kinematyczno
Kinematyczno
geometryczne
geometryczne
aspekty obróbki
aspekty obróbki
skrawaniem
skrawaniem
Kinematyczno geometryczne
Kinematyczno geometryczne
aspekty obróbki skrawaniem
aspekty obróbki skrawaniem
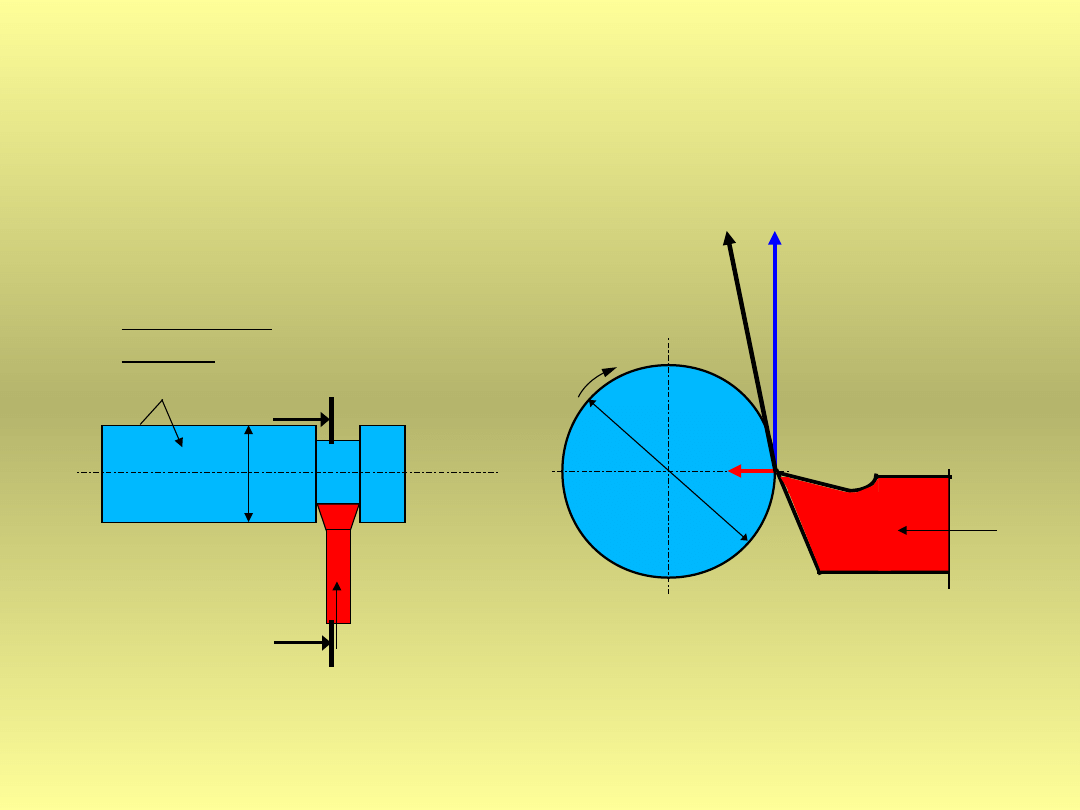
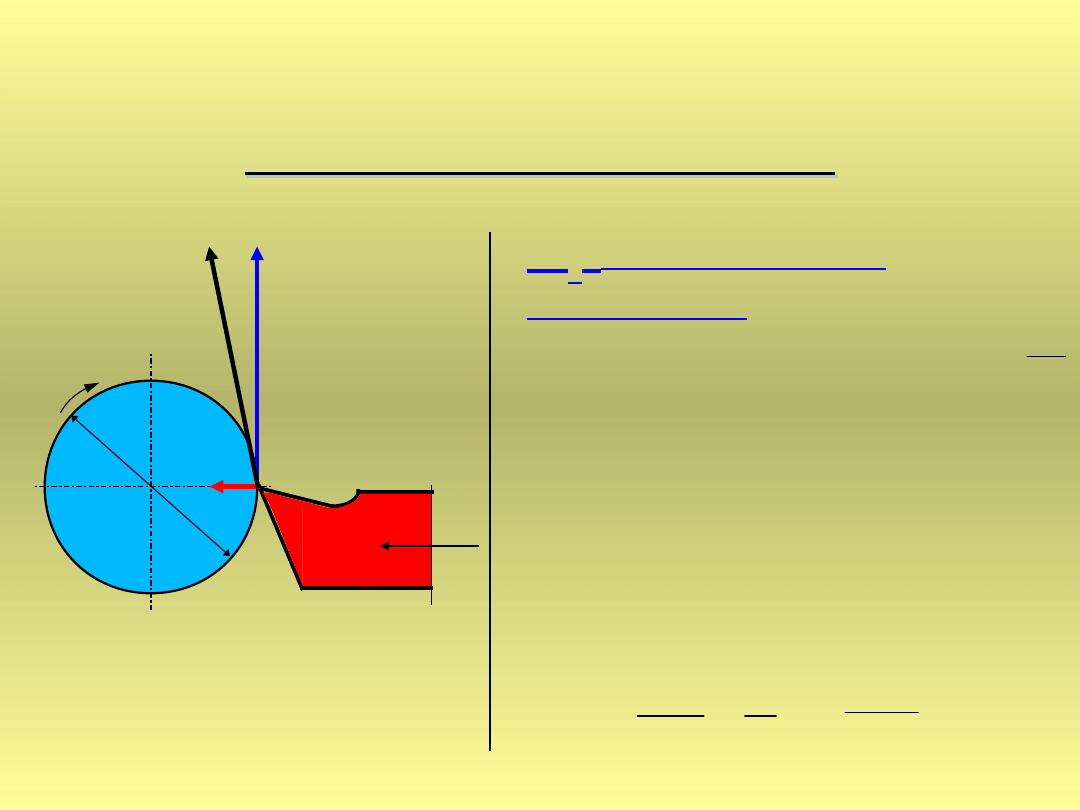
Aby zaistniał proces skrawania
musi nastąpić złożenie dwóch
ruchów:
1.
Ruch główny (v
c
)
2.
Ruch posuwowy (V
f
)
Kinematyczno geometryczne
Kinematyczno geometryczne
aspekty obróbki skrawaniem
aspekty obróbki skrawaniem
n
V
f
D
Nacinanie
rowka
A
A
n
D
V
f
v
c
V
f
V
e
Kinematyczno geometryczne aspekty obróbki
Kinematyczno geometryczne aspekty obróbki
skrawaniem
skrawaniem
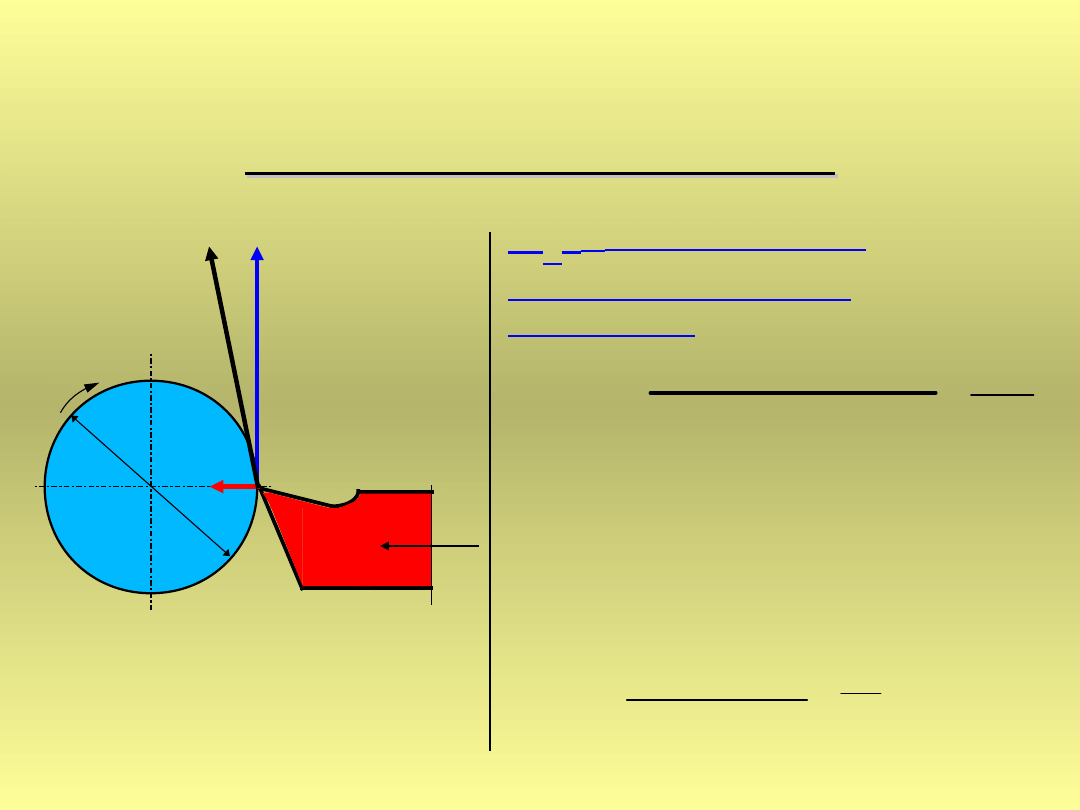
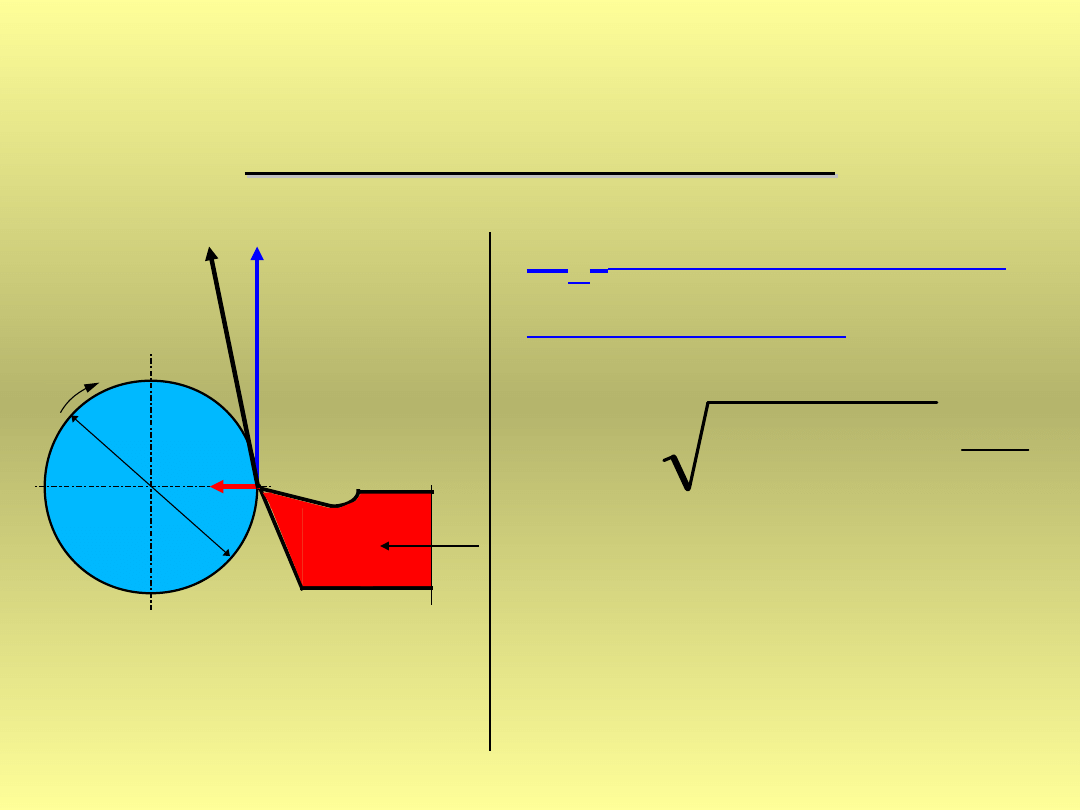
Wzory podstawowe
Wzory podstawowe
n
D
V
f
v
c
V
f
V
e
1000
n
D
v
c
min
m
D
v
n
c
1000
min
obr
D – średnica narzędzia lub
przedmiotu
obrabianego (d) [mm]
n – prędkość obrotowa [obr/min]
v
c
-
prędkość ruchu
głównego (prędkość
skrawania)
Kinematyczno geometryczne aspekty obróbki
Kinematyczno geometryczne aspekty obróbki
skrawaniem
skrawaniem
Wzory podstawowe
Wzory podstawowe
n
D
V
f
v
c
V
f
V
e
n
z
f
n
f
f
V
z
t
f
min
mm
V
f
-
prędkość ruchu
posuwowego
f
t
– posuw minutowy [mm/min]
f
– posuw na obrót [mm/obr]
f
z
–
posuw na ostrze
[mm/ostrze]
z – liczba ostrzy
z
f
n
z
f
f
t
z
ostrze
mm
Kinematyczno geometryczne aspekty obróbki
Kinematyczno geometryczne aspekty obróbki
skrawaniem
skrawaniem
Wzory podstawowe
Wzory podstawowe
n
D
V
f
v
c
V
f
V
e
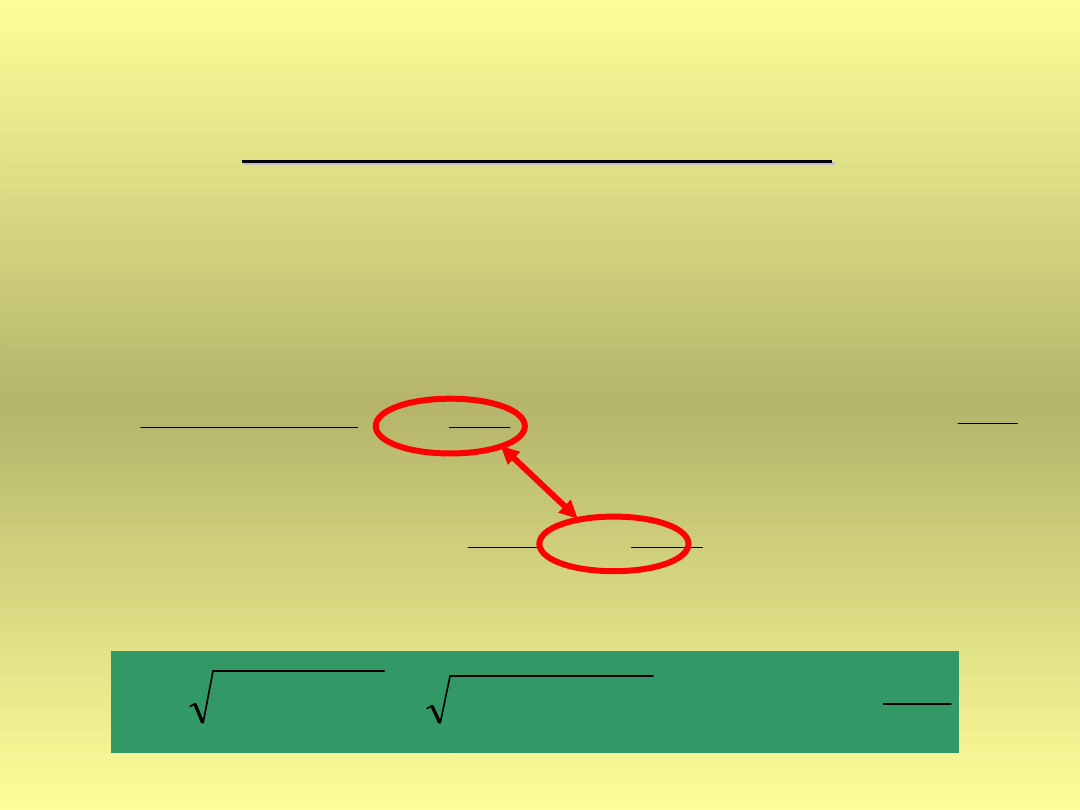
2
2
f
c
e
V
v
V
min
m
V
e
-
prędkość wypadkowa
(efektywna)
Kinematyczno geometryczne aspekty obróbki
Kinematyczno geometryczne aspekty obróbki
skrawaniem
skrawaniem
1000
n
D
v
c
min
m
D
v
n
c
1000
min
obr
n
z
f
n
f
f
z
t
min
mm
WZORY UŻYTKOWE
Prędkość ruchu
głównego
(Prędkość skrawania)
Prędkość obrotowa
Posuw minutowy
z
f
n
z
f
f
t
z
ostrze
mm
Posuw na ostrze
Kinematyczno geometryczne aspekty obróbki
Kinematyczno geometryczne aspekty obróbki
skrawaniem
skrawaniem
Wzory podstawowe
Wzory podstawowe
Obliczyć v
c
, v
f
i v
e
podczas toczenia wzdłużnego wałka:
d=50mm
n=1000obr/min
f=0,1mm/obr
min
157
1000
1000
50
14
,
3
m
v
c
min
100
1000
1
,
0
mm
n
f
v
f
min
1
,
0
min
100
m
mm
v
f
min
000032
,
157
01
,
0
24649
1
,
0
157
2
2
m
v
e
Kinematyczno geometryczne aspekty obróbki
Kinematyczno geometryczne aspekty obróbki
skrawaniem
skrawaniem
Zachowanie stałej
Zachowanie stałej
wartości f
wartości f
z
z
1000
n
D
v
c
min
m
min
mm
D
v
n
c
1000
min
obr
Zalecenia producenta narzędzi dla freza
6mm,
z=4
:
v
c
=377m/min, n=20000obr/min, f
z
=0,05mm/ostrze,
f
t
=4000mm/min
Nasza obrabiarka ma maksymalne obroty
n
max
=
5000 obr/min
1000
5000
4
05
,
0
n
z
f
f
z
t
f
z
=cons
t
z
f
n
z
f
f
t
z
Czas skrawania
Czas skrawania
t
t
s
s
i czas maszynowy
i czas maszynowy
t
t
m
m
Czas skrawania
t
s
– czas kontaktu ostrza z materiałem
obrabianym
[min]
n
z
f
L
v
L
t
z
f
s
[min]
n
z
f
L
L
L
v
L
L
L
t
z
W
D
f
W
D
m
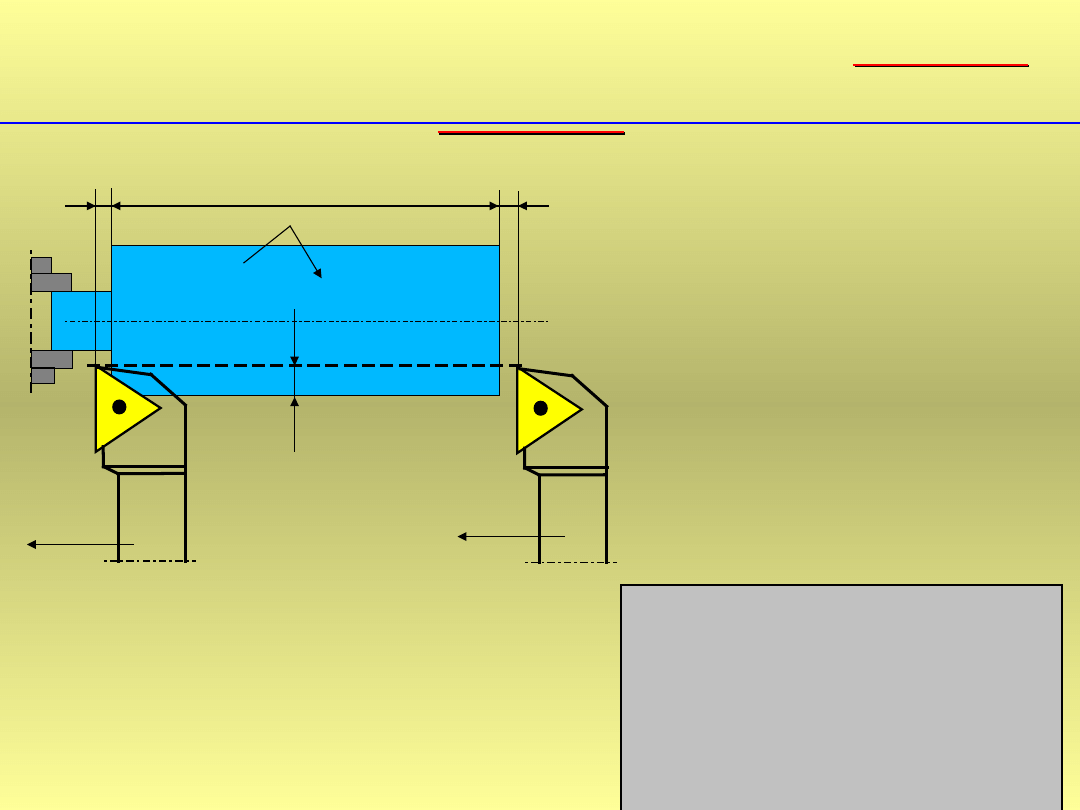
Czas skrawania
Czas skrawania
t
t
s
s
i czas maszynowy
i czas maszynowy t
t
m
m
-
- Toczenie
Toczenie
wzdłużne
wzdłużne
v
f
a
p
v
f
L
L
W
L
D
n
L – droga skrawania
[mm]
L
D
– droga dojścia [mm]
L
W
– droga wyjścia [mm]
a
p
– głębokość skrawania
[mm]
L = D/2 [mm]
L
W
= 24 mm
L
D
= x + (24)
mm
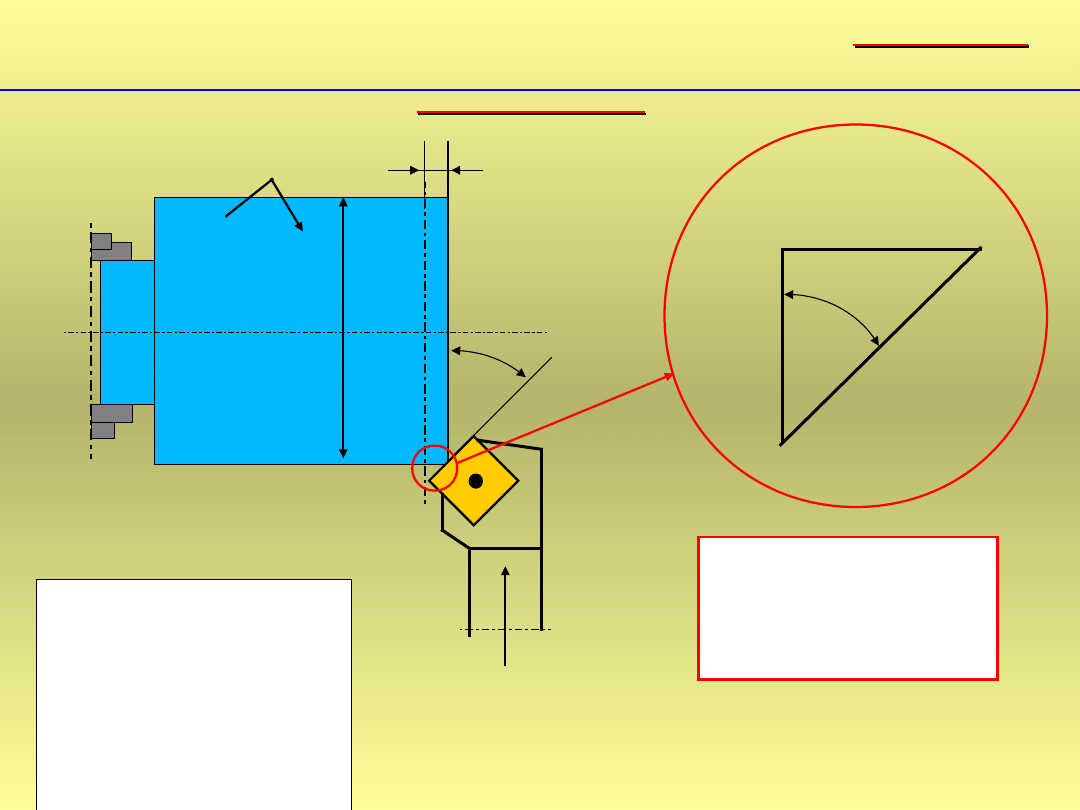
Czas skrawania
Czas skrawania
t
t
s
s
i czas maszynowy
i czas maszynowy t
t
m
m
-
- Toczenie
Toczenie
poprzeczne
poprzeczne
r
x
a
p
a
p
v
f
n
D
r
x = a
p
•
ctg
r
Document Outline
Wyszukiwarka
Podobne podstrony:
Wykł 1B wstępny i kinematyka
Wyklad 06 kinematyka MS
Wyklad 05 kinematyka MS
3 Rodzaje jednorodnych transformacji stosowanych w kinematy
MRIT Materiały narzędziowe
04 Analiza kinematyczna manipulatorów robotów metodą macierz
Mechanika Techniczna I Skrypt 2 4 Kinematyka
03 Kinematyka
fizyka 2 KINEMATYKA PUNKTU MATERIALNEGO
kinematyka manipulatora
kinematyka
zestaw 3 kinematyka
03 Kinematykaid 4394 Nieznany
więcej podobnych podstron