
Adam Gałuszka, p.936
Metody Obliczeniowe Optymalizacji – wykład 1
http://www.zsir.ia.polsl.pl/~dydaktyka/mo_gliwice/index.html
Organizacja przedmiotu:
15 h wykładu, podzielone na 1 wykład 1h wprowadzający
i 7 wykładów 2h.
Zaliczenie wykładu: kolokwium zaliczające 1 h zegarowa
(4 zagadnienia: 2 teoretyczne i 2 praktyczne), po
ostatnim wykładzie (w godz. wykładu)
15 h laboratorium, podzielone na 4 ćwiczenia 3h i termin
odrobieniowy 3h – regulamin i warunki zaliczenia na
stronie lab.

literatura
• Bryson A., Y.C. Ho: Applied optimal control, Blaisdell, 1969
• Findeisen W., J. Szymanowski, A. Wierzbicki: Metody
optymalizacji, PWN, 1977
• Helmke U., J. Moore: Optimization and dynamical systems,
Springer, 1994
• Luenberger D.: Optimization by vector space methods, John
Wiley, 1969 (Polish translation-Teoria optymalizacji, PWN,
1974)
• Luenberger D.: Introduction to linear and nonlinear
programming, Adison-Wesley, 1973
• Ogonowski Z., J. Smieja: Optimization Methods and Decision
Making, Art&Kolor, Gliwice, 2001
• MATLAB Optimization Toolbox

optymalizacja
• Wyznaczanie przy użyciu metod
matematycznych optymalnego (najlepszego)
ze względu na dane kryteria, rozwiązania
danego problemu.
• Łac.: „optimus” – najlepszy
• Rozwiązać problem optymalizacyjny =
znaleźć minimum (lub maksimum) funkcji
kosztów uwzględniając ograniczenia dane
przez model procesu, który mamy
optymalizować.

Optymalizacja statyczna
• Tzw. Programowanie matematyczne
• Programowanie liniowe
• Programowanie kwadratowe
• Programowanie nieliniowe
• Programowanie całkowito-liczbowe
(całkowito-liczbowe binarne)
• Model procesu i rozwiązania nie zależą od
czasu

Optymalizacja dynamiczna
• Tzw. Sterowanie optymalne
• Programowanie dynamiczne
• Model procesu, rozwiązania problemu
są funkcjami czasu

Przykład 1 – alokacja zasobów
(resource allocation)
Consider the problem of allocation of m resources for production of n
commodities. Denote:
n – number of products (j = 1,2 ... n)
m – number of resources (i = 1,2 ... m)
xj - amount of the product j (to be produced)
aij - amount of the i-th resource needed for a unit of the j-th product
bi – available amount of the i-th resource
cj - price (per unit) of the j-th product constraints
We have the following constraints:
and the profit (cost functional) is given as:
In a vector form the problem may be described as:
This problem is an example of Linear Programming Problem.
n
j
i
j
ij
b
x
a
1
n
j
m
i
x
j
,...,
2
,
1
;
,...,
2
,
1
;
0
n
j
j
j
x
c
Max
1
x
c
Max
x
b
Ax
T
0
,
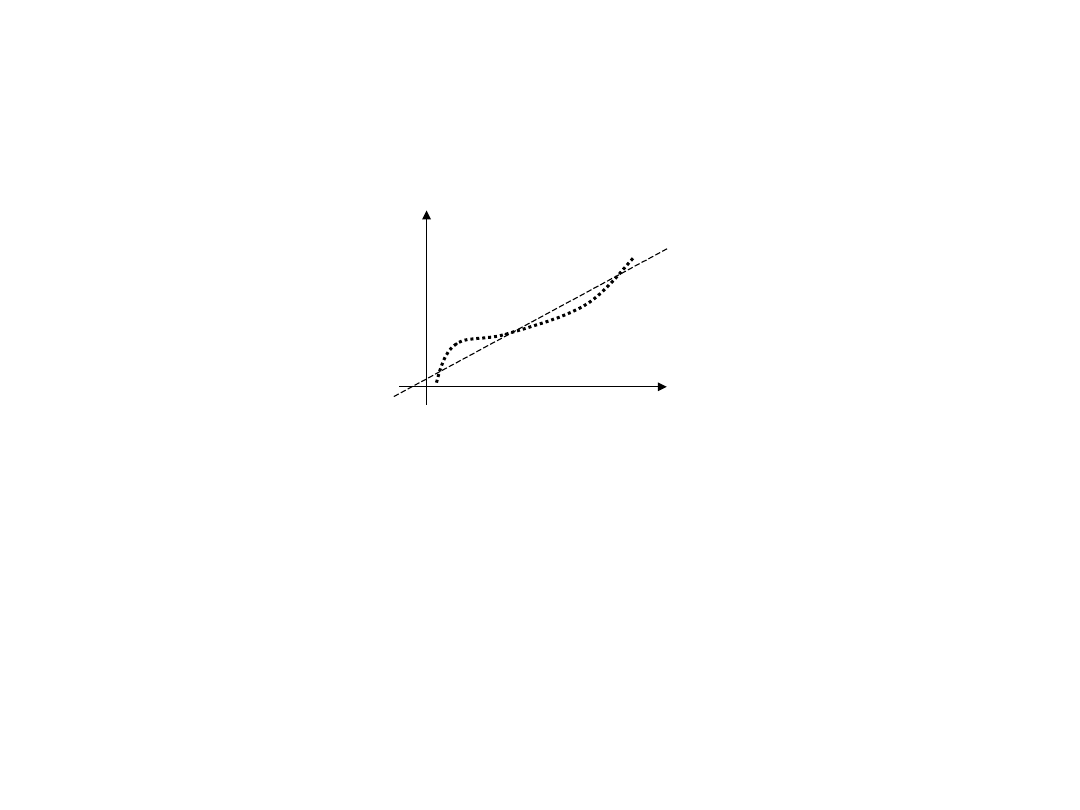
Przykład 2 - Approximation
(e.g. linear regression)
y
We want to approximate our data by the ‘’best’’ fitted straight line,
so the objective is to find:
i
i
i
a
ax
y
Min
2
)
(
Przykład 3 – problem
rakietowy
T
dt
u
Min
h
T
x
x
x
0
)
(
0
)
0
(
0
)
0
(
g
u
x
h
Here the problem is how to change the trust of the rocket
to elevate it to the given altitude while minimizing
fuel consumption which is instantenously proportional
to the absolute value of the trust.
Fuel
consumption
Trust (per mass unit) can be described by:
Przykład 4 – problem
farmera
0
)
0
(
x
x
ux
x
1
0
u
T
xdt
u
Max
0
)
1
(
Prof
t
A farmer wants to maximize his profit by optimization of
the reinvestment ratio.
If x – amount of the farmer’s production then
where u is a investment fraction:
The optimization problem is to maximize the profit:

Wspólne cechy problemu
optymalizacji
• Funkcja celu (minimalizacja strat lub maksymalizacja zysków)
• Ograniczenia w postaci modelu procesu
• Dodatkowe ograniczenia
• W postaci matematycznej: (oznaczamy F – funkcja celu, g – ograniczenia):
R
X
J
Max
Min
:
)
(
0
)
(
x
g
0
)
(
x
g
0
)
(
x
g
X
g:
1)
2)

Program wykładu
1. Ekstremum funkcji bez ograniczeń, przykłady
2. Ekstremum funkcji z ograniczeniami równościowymi,
przykłady
3. Ekstremum funkcji z ograniczeniami
nierównościowymi - tzw. Warunki Kuhna-Tuckera,
przykłady
4 i 5. Zadanie Programowania Liniowego – metoda
Sympleksów, dualność w ZPL, przykłady
6 i 7. Zadanie Programowania Kwadratowego – metoda
Wolfa, przykłady

Program laboratorium
Prowadzący:
Ćw. 1: Dr inż. Adam Gałuszka, pok. 936, adam.galuszka@polsl.pl
Ćw. 2: Dr inż. Rafał Grygiel,
pok. 929, rafal.grygiel@polsl.pl
Ćw. 3: Dr inż. Robert Bieda,
pok. 627, robert.bieda@polsl.pl
Ćw. 4: Mgr inż. Aneta Bal,
pok. 627, aneta.bal@polsl.pl
1. Programowanie liniowe
2. Minimalizacja na kierunku i metody prostych kierunków poprawy
3. Metody kierunków sprzężonych
4. Metody newtonowskie i metody funkcji kary
Zajęcia wg harmonogramu na stronie:
•
http://www.zsir.ia.polsl.pl/~dydaktyka/mo_gliwice/index.html
Document Outline
Wyszukiwarka
Podobne podstrony:
MOO wyklad 2 ekstrema bez ograniczen
MOO wyklad Progr Liniowe i Alg Sympleks
MOO wyklad 2 ekstrema bez ograniczen
MOO wyklad Progr Liniowe i Alg Sympleks
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
Zaburzenia nerwicowe wyklad
Szkol Wykład do Or
Strategie marketingowe prezentacje wykład
więcej podobnych podstron