
1
Instytut Maszyn, Napędów i Pomiarów Elektrycznych
WYKŁAD 3
NAPĘD ELEKTRYCZNY
ROBOTÓW
Zagadnienia napędu
pośredniego

2
Zagadnienia napędu pośredniego
Napęd pośredni – konieczność
„dopasowania” standardowej, dużej
prędkości SE do wymaganej, małej
zwykle, prędkości roboczej
mechanizmu:
1- uwzględnienie przekładni,
2 - dobór silnika.
3
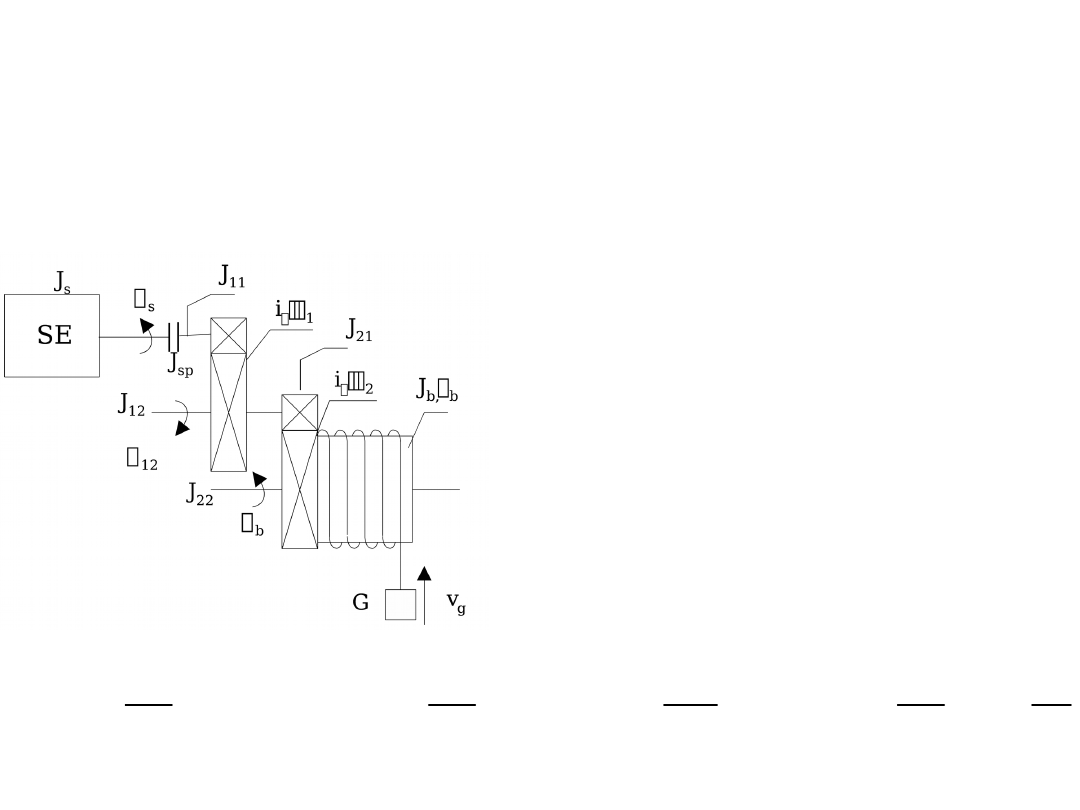
Uwzględnienie przekładni
Przykład : mechanizm podnoszenia wciągarki z
przekładnią 2-stopniową, o sprawności
b
,
2
1
,
Przy wyznaczeniu
zastępczego momentu
bezwładności korzysta się z
zasady zachowania energii,
czyli, że całkowita energia
kinetyczna układu
zastępczego musi być
równa sumie energii
kinetycznych
poszczególnych elementów
układu rzeczywistego.
2
2
2
2
2
2
2
22
2
12
21
12
2
11
2
g
G
b
b
s
sp
s
s
z
k
v
m
J
J
J
J
J
J
J
J
E
4
Uwzględnienie przekładni
2
2
2
1
22
2
1
21
12
11
1
1
s
g
G
b
sp
s
z
v
m
i
i
J
J
i
J
J
J
J
J
J
Po podzieleniu przez
gdzie:
Czyli ogólna zależność będzie miała postać:
2
s
b
s
i
i
/
,
/
12
2
11
1
m
k
s
k
k
n
j
s
j
j
z
v
m
J
J
1
2
1
2
5
Obliczanie mocy znamionowej
silnika
z uwzględnieniem optymalnej
wartości współczynnika
przekładni
Punktem wyjścia do przybliżonego
wyznaczenia parametrów silnika są
parametry mechaniczne obiektu
napędzanego (pary kinematycznej):
- momenty bezwładności i zakresy ich
zmienności,
- momenty obciążenia grawitacyjne i
tarciowe
(maksymalne i średnie).

6
Obliczanie mocy
znamionowej silnika
z uwzględnieniem optymalnej
wartości współczynnika
przekładni
Założenia upraszczające:
1) elementy przenoszenia napędu są
sztywne (nie występują siły
sprężystości),
2) pomija się momenty Coriolisa
(oddziaływanie innych par
kinematycznych)
3) moment obciążenia jest stały, równy
wartości maksymalnej,
4) moment bezwładności obciążenia
(mechanizmu) ma wartość
maksymalną:
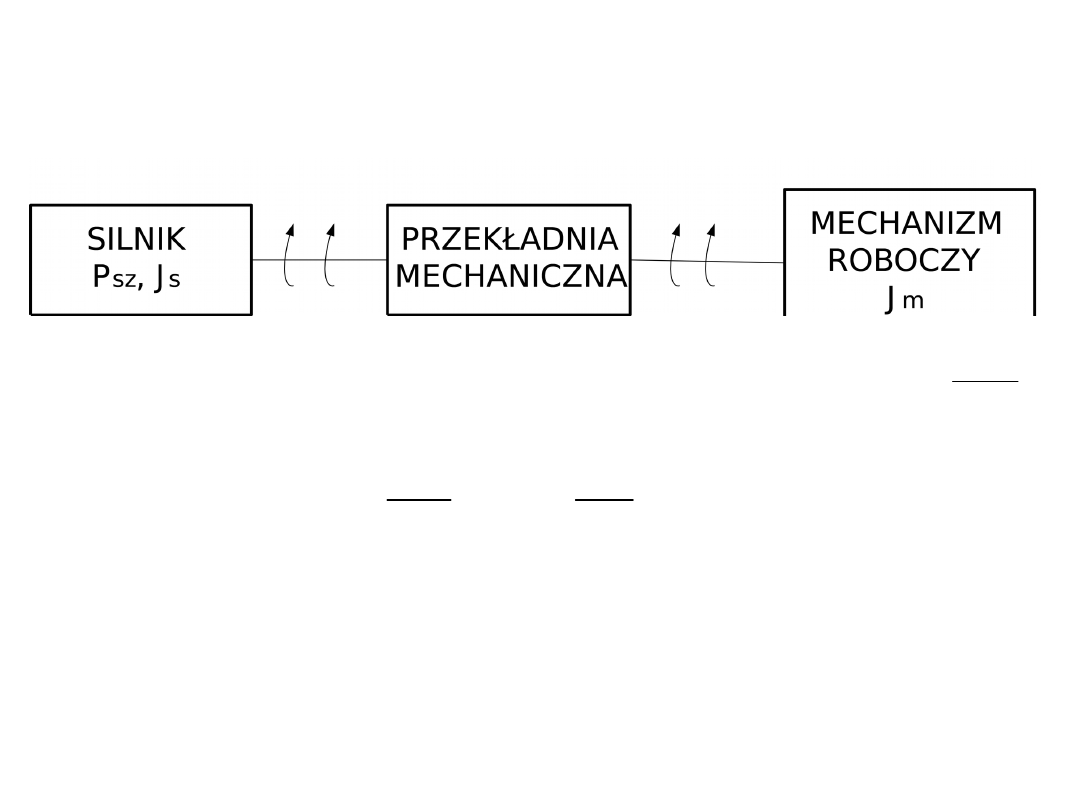
7
Obliczanie mocy
znamionowej silnika
Dla uproszczonego schematu kinematycznego jak
na rys.:
potrzebna moc silnika:
(1)
gdzie: m
m
- moment oporowy mechanizmu, η –
sprawność
przekładni, ω
m
, dω
m
/dt – prędkość i
przyspieszanie maksym.,
J
m
– całkowity moment bezwładności mechanizmu,
J
s
–moment
bezwładności silnika, i – przełożenie przekładni
(ω
s
/ω
m
)
Wielkości szukane: P
sz
, J
s ,
i.
dt
d
J
m
m
m
P
m
z
m
sz
s
sz
sz
:
gdzie
,
m
m
s
m
m
m
s
sz
sz
i
J
J
m
m
P
2
8
Przypomnienie:
m
s
m
s
o
o
e
oz
i
m
i
m
m
m
;
2
1
1
1
i
J
J
J
s
z
9
Obliczanie mocy
znamionowej silnika
Po podzieleniu obu stron równania przez ω
m
(2)
Optymalne przełożenie przekładni odpowiadające
minimalnej wartości momentu dynamicznego przy
danym przyspieszeniu – po zróżniczkowaniu
względem i=i
o
i przyrównaniu do zera:
(3)
skąd optymalny współczynnik przekładni będzie
miał postać
(tylko dodatnia wartość):
(4)
m
s
m
m
sz
i
J
i
J
i
m
m
0
2
2
m
s
o
m
m
o
m
o
sz
J
i
J
i
m
di
dm
m
s
m
m
m
o
J
J
m
i
10
Obliczanie mocy
znamionowej silnika
Po podstawieniu do zależności na moc,
otrzymuje się zależność umożliwiającą
wstępny dobór silnika:
(5)
Dobór ten nie jest ostateczny, bo nie zapewnia
właściwego wyboru znamionowej prędkości
kątowej i momentu silnika.
Z katalogu uzyskuje się :
(6)
m
m
m
m
m
sz
J
m
P
2
s
sN
sN
sz
sN
J
m
P
P
,
,
,

11
Obliczanie mocy
znamionowej silnika
Znając moment bezwładności silnika J
s
, można z
wzoru (4)
określić optymalne przełożenie przekładni, a to
umożliwia zbadanie poprawności wyboru silnika
ze względu na wymagane wartości:
- momentu rozruchowego,
- prędkości maksymalnej:
(7)
Możliwe są 2 przypadki:
o
m
sz
sN
sN
i
m
m
max
o
m
sN
sz
sN
o
m
sN
sz
sN
i
m
m
i
m
m
oraz
)
2
oraz
)
1
max
max
12
Obliczanie mocy
znamionowej silnika
W 1-szym przypadku – dobór silnika poprawny,
jeśli przyjąć, że przeciążalność momentem
silników „serwo” mieści się w przedziale:
W 2-gim przypadku – silnik ma zbyt małą
prędkość
i konieczny jest wybór silnika o zbliżonej mocy,
ale większej prędkości kątowej. Wtedy zmieni
się J
s
; należy więc skorygować i
o
o ponownie
sprawdzić
(7)!
o
m
sN
sz
sN
o
m
sN
sz
sN
i
m
m
i
m
m
oraz
)
2
oraz
)
1
max
max
10
3
max
sN
s
m
m

13
Dziękuję za uwagę
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
Wyszukiwarka
Podobne podstrony:
Napęd Elektryczny wykład
W4 Proces wytwórczy oprogramowania
W4 2010
Statystyka SUM w4
w4 3
W4 2
W4 1
w4 skrócony
w4 orbitale molekularne hybrydyzacja
in w4
Napęd i ster
w4 Zazębienie ewolwentowe
TM w4
IB w4 Aud pełny
więcej podobnych podstron