
T13. Dynamika punktu
materialnego
Zasady dynamiki Newtona.
Zasada d’Alemberta.
Równania ruchu punktu
materialnego.
Pęd i impuls.
Moment pędu.
Praca i energia mechaniczna.
I zasada dynamiki Newtona:
Punkt materialny, na który nie działa żadna siła,
lub siły działające równoważą się, pozostaje w
spoczynku lub porusza się ruchem jednostajnym
prostoliniowym
II zasada dynamiki Newtona:
Przyspieszenie
punktu
materialnego
jest
proporcjonalne do siły wypadkowej działającej na
ten punkt i ma kierunek oraz zwrot tej siły.
( )
( )
F t
a t
m
=
r
r
Zasady dynamiki
Newtona

Jeżeli przyspieszenie punktu materialnego równe
jest zeru, prędkość ma stałą wartość (ruch
jednostajny lub spoczynek) i nie zmienia kierunku
ruchu (ruch prostoliniowy).
( ) 0
( ) 0
F t
a t
=
�
=
r
r
Zasady dynamiki
Newtona
Pierwsza zasada dynamiki jest szczególnym
przypadkiem drugiej zasady.

Uwzględniając, że siła F jest wypadkową sił,
mamy:
( )
( )
( )
( ) 0
F t
ma t
F t ma t
=
�
-
=
r
r
r
r
Zasada
d’Alemberta
1
( )
( ) 0
n
i
i
F t ma t
=
-
=
�
r
r
Powyższe równanie przybierze postać równania
równowagi
układu
sił
zbieżnych,
jeżeli
wprowadzimy
siłę
zdefiniowaną
w
sposób
następujący:
( )
( )
B
F t
ma t
=-
r
r
Siłę F
B
nazywamy
siłą bezwładności
.

Zasada
d’Alemberta
1
( )
( ) 0
n
i
B
i
F t
F t
=
+
=
�
r
r
Zasada d’Alemberta
:
Układ sił rzeczywistych i siły bezwładności
pozostaje w każdej chwili czasu w równowadze.
Zasada d’Alemberta pozwala zastosować metody
statyki do wyznaczania siły bezwładności, a co za
tym idzie wektora przyspieszenia.
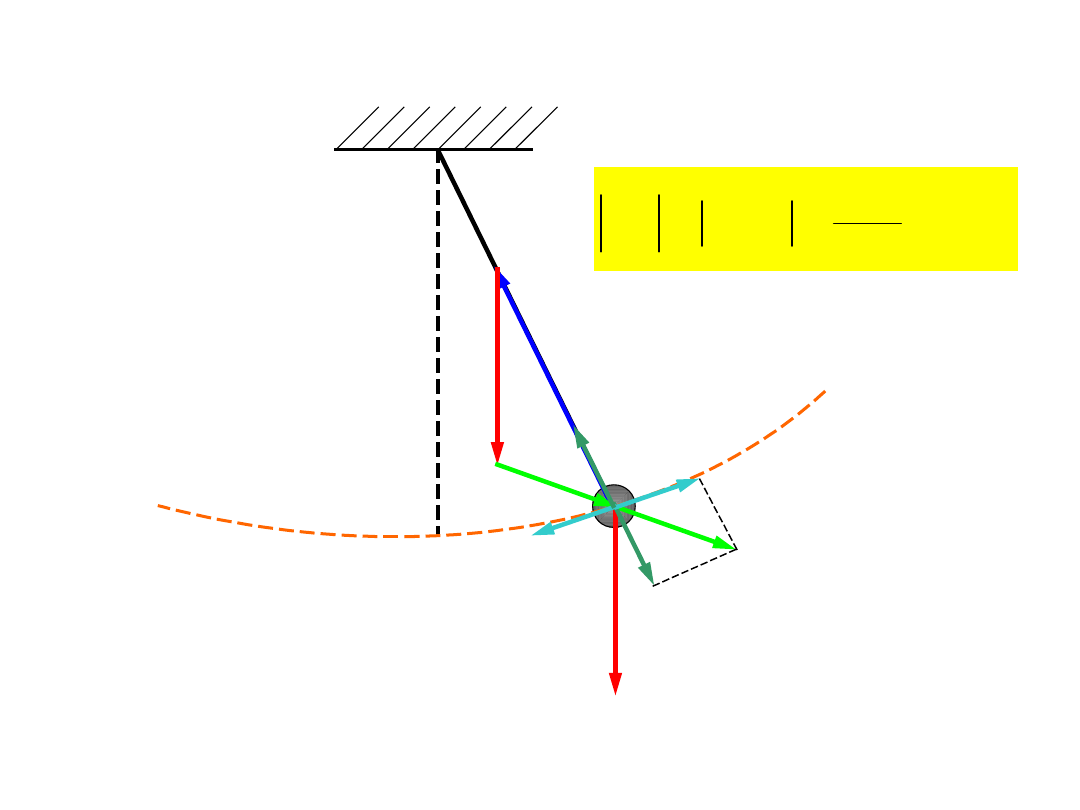
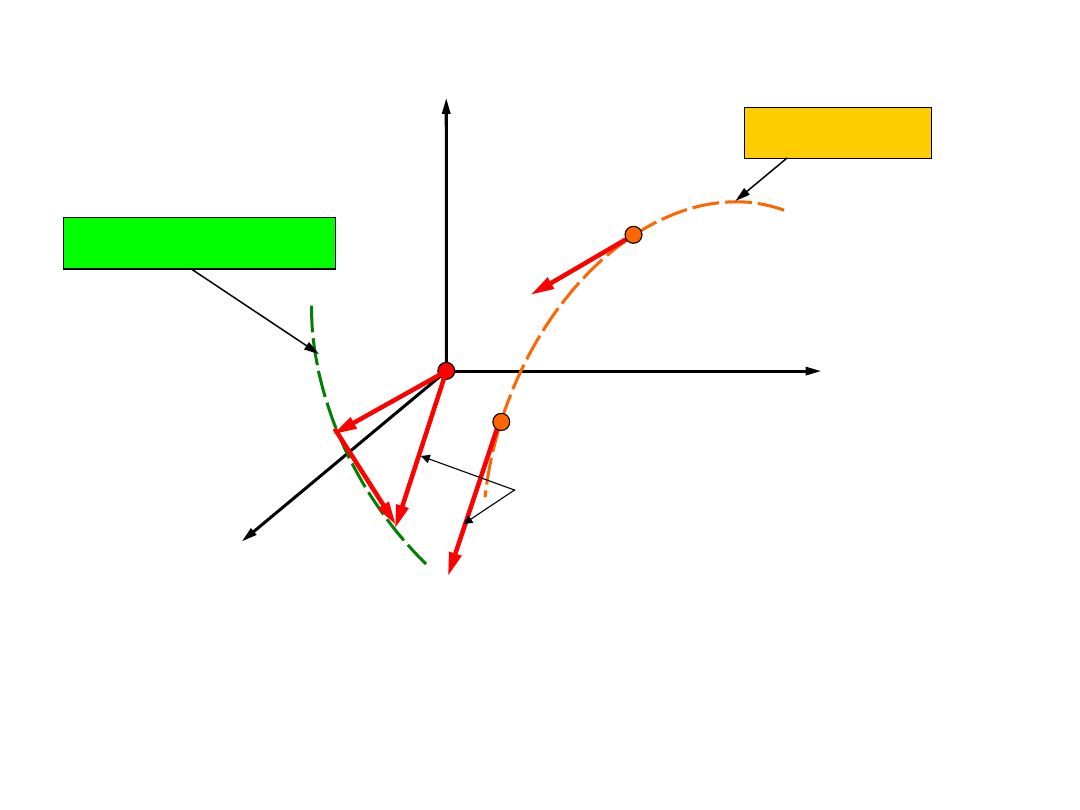
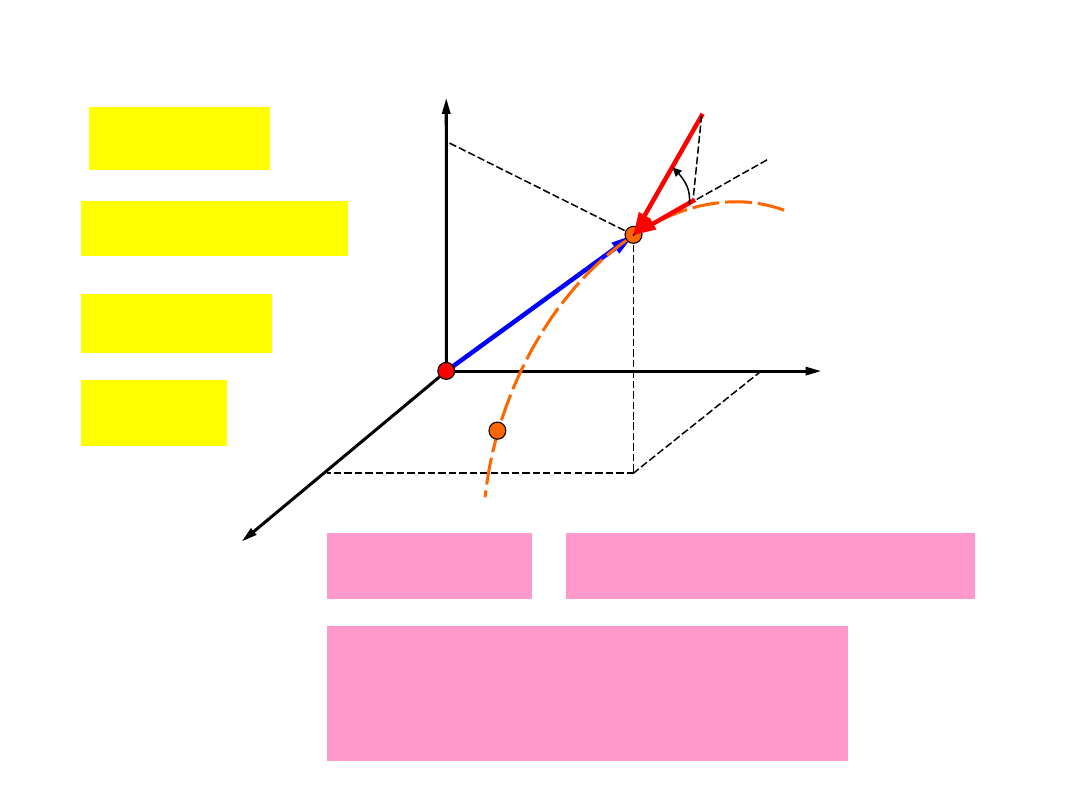
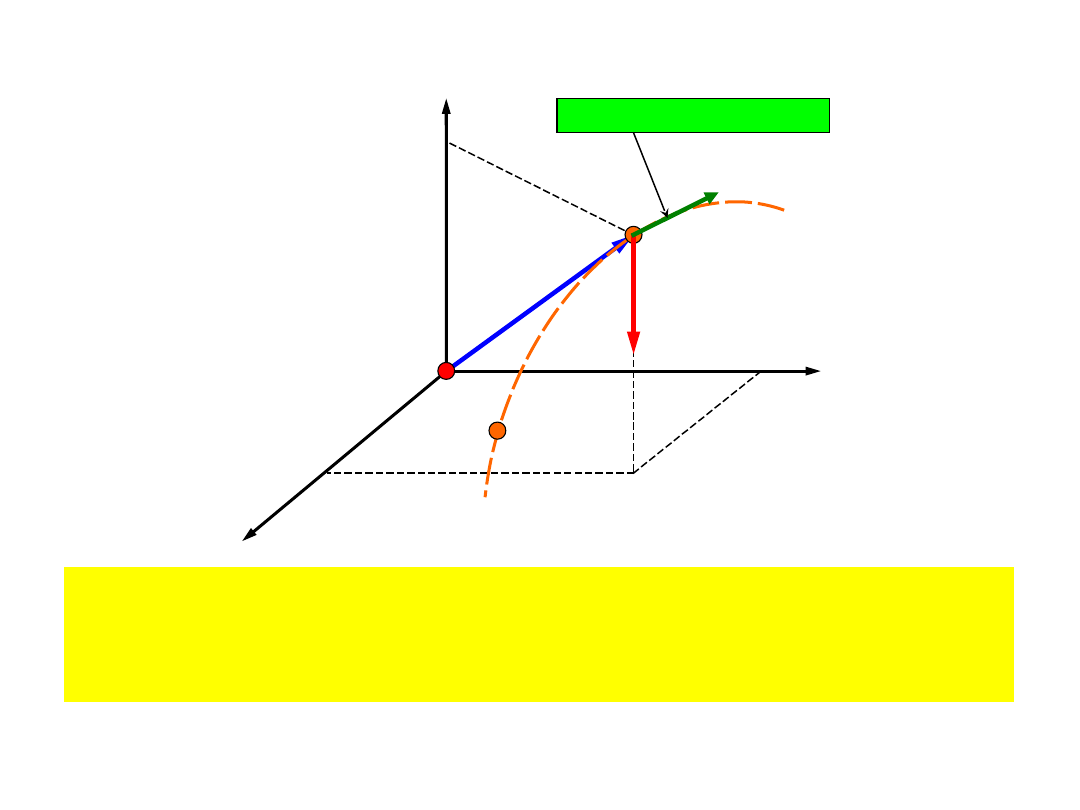
Zasada
d’Alemberta
G
R
F
B
F
Bs
F
Bn
F
Bn
–
siła odśrodkowa
a
s
a
n
2
Bn
n
mu
F
ma
mu
r
w
=-
=
=
r
r
Równania ruchu punktu
materialnego
( )
( )
( )
,
dr
du
F t
u t
a t
dt
dt
m
=
=
=
r
r
r
r
r
( )
( )
( )
( )
( )
( )
,
,
,
,
x
y
z
y
y
x
z
x
z
dx
dy
dz
u t
u t
u t
dt
dt
dt
du
F t
F t
F t
du
du
dt
m
dt
m
dt
m
=
=
=
=
=
=
( )
( )
( )
( )
( )
( )
0
0
0
0
0
0
0
,
0
,
0
0
,
0
,
0
x
x
y
y
z
z
x
x
y
y
z
z
u
u
u
u
u
u
=
=
=
=
=
=
Warunek początkowy:
Równania ruchu punktu
materialnego
( )
( )
( )
2
2
2
2
2
2
,
,
y
x
z
F t
F t
F t
d x
d y
d z
dt
m
dt
m
dt
m
=
=
=
( )
( )
( )
( )
( )
( )
0
0
0
0
0
0
0
,
0
,
0
0
,
0
,
0
x
y
z
x
x
y
y
z
z
dx
dy
dz
u
u
u
dt
dt
dt
=
=
=
=
=
=
Warunek początkowy:
Równania ruchu punktu
materialnego
( )
( )
( , , )
,
dr
du
F t r u
u t
a t
dt
dt
m
=
=
=
r
r
r
r r
r
r
( )
( )
( )
(
)
(
)
(
)
,
,
, , , , , ,
,
, , , , , ,
,
, , , , , ,
x
y
z
x
x
y
z
x
y
x
y
z
y
z
x
y
z
z
dx
dy
dz
u t
u t
u t
dt
dt
dt
F t x y z u u u
du
dt
m
F t x y z u u u
du
dt
m
F t x y z u u u
du
dt
m
=
=
=
=
=
=
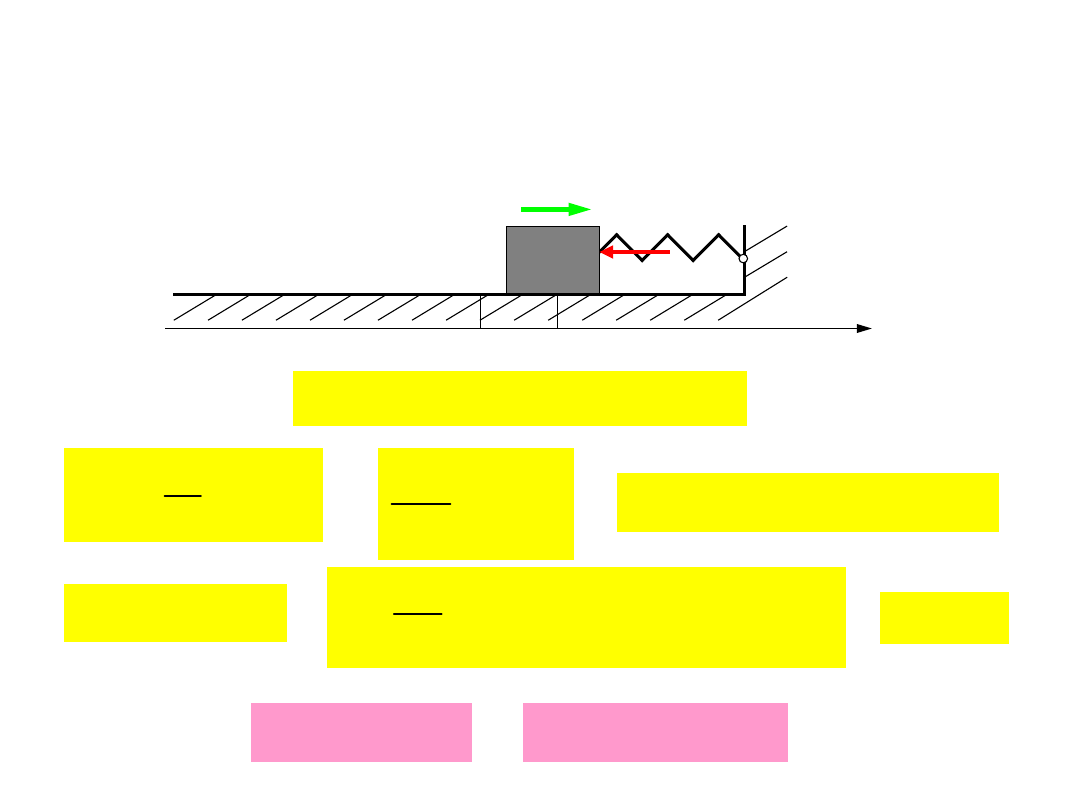
Równania ruchu punktu
materialnego
Przykład 1: Ruch harmoniczny po
prostej
x
0
x
0
2
x
kx
a
w x
m
=-
=-
2
2
2
d x
w x
dt
=-
( )
( )
sin
cos
x A
wt
B
wt
=
+
0
(0)
x
x
B
= =
( )
( )
cos
sin
d x
u
Aw
wt
Bw
wt
dt
=
=
-
0 Aw
=
( )
0
cos
x x
wt
=
( )
0
cos
u
wx
wt
=-
F
F
B
0
0
B
x
F
F
ma
kx
-
= � -
-
=
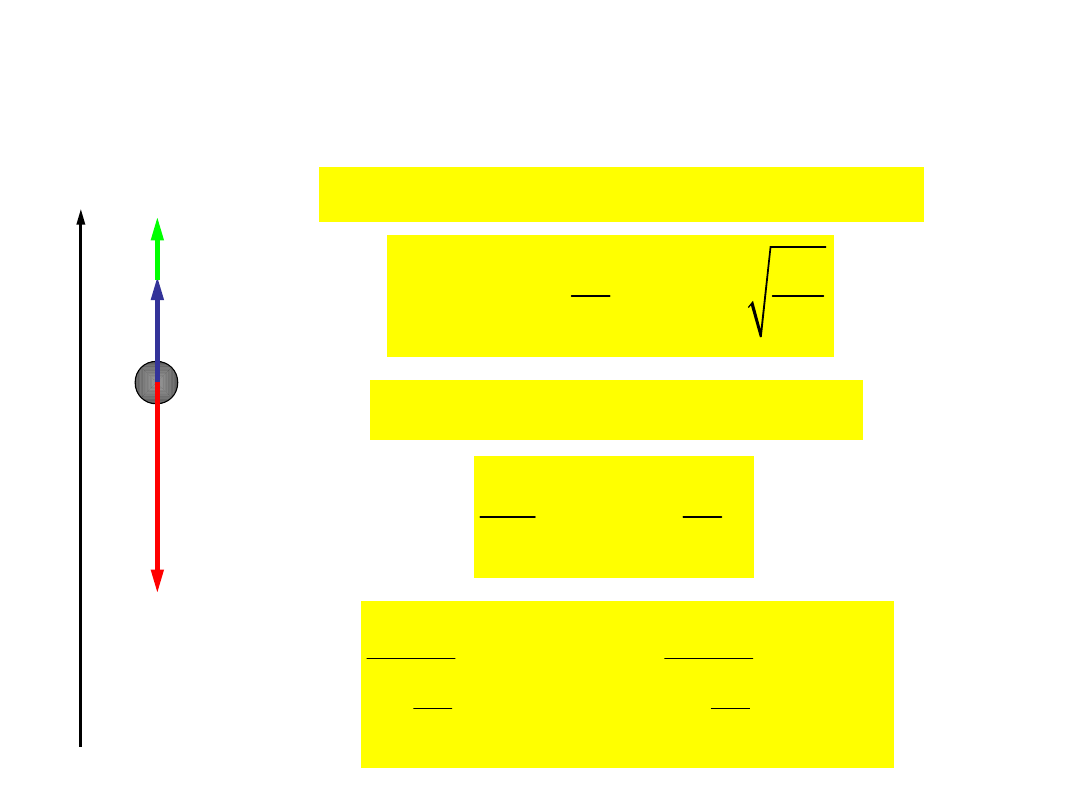
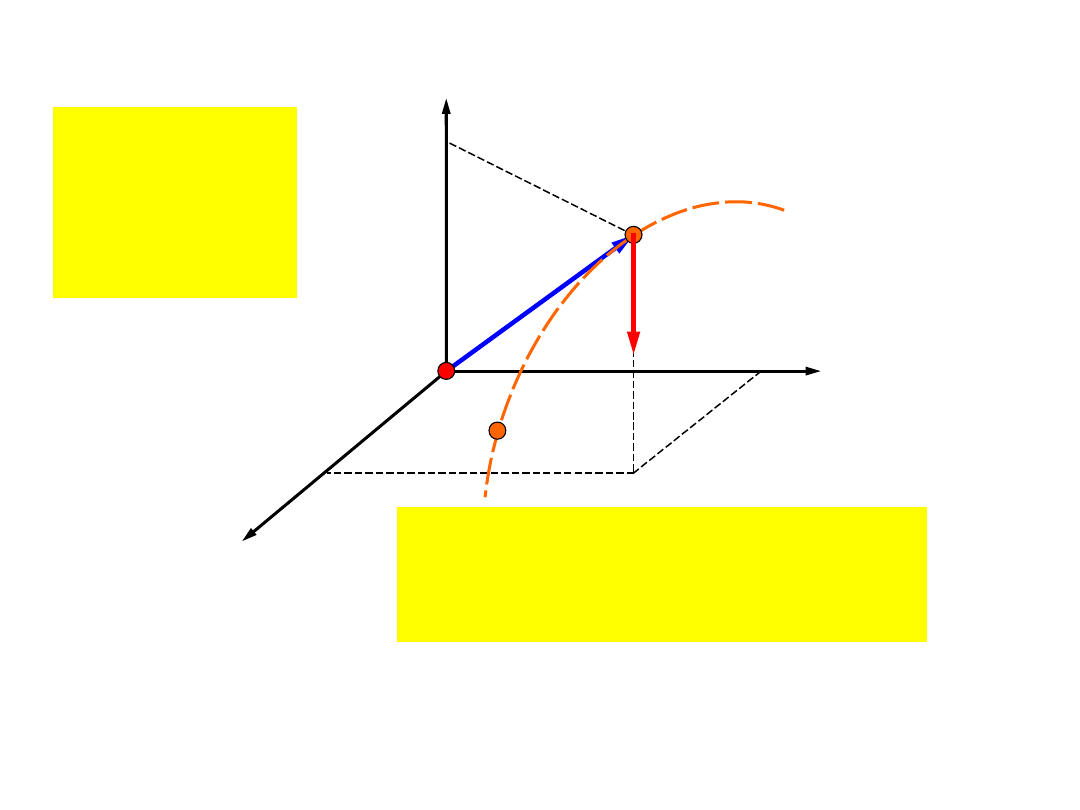
Równania ruchu punktu
materialnego
Przykład 2: Spadek swobodny z oporem
powietrza
2
0
0
B
z
z
F
R G
ma cu
mg
+ -
= � -
+
-
=
z
G
R
F
B
2
2
1
,
z
z
g
g
u
mg
a
g
u
u
c
�
�
=-
-
=
�
�
�
�
�
�
2
2
1
z
z
g
du
u
g
dt
u
�
�
=-
-
�
�
�
�
�
�
2
2
0
0
2
2
1
1
z
u
t
z
z
g
g
du
d
gdt
g dt
u
u
u
n
n
=-
�
=-
-
-
�
�
(
)
0,
0,
( )
x
y
z
z
z
F
F
F
F u t
=
=
=
Równania ruchu punktu
materialnego
2
2
0
0
2
1
1
z
g
z
u
u
u
g
g
g
g
d
d
u
u
d
u d
u
n
y
n
y
n
y
n
y
=
=
=
-
-
=
�
�
( )
arctgh
arctgh 0
z
g
g
u
u
gt
u
�
�
� �
-
=-
�
�
� �
� �
�
�
� �
�
�
arctgh
z
g
g
u
gt
u
u
� �
=-
� �
� �
� �
tgh
z
g
g
gt
u
u
u
� �
=-
� �
� �
� �
tgh
g
g
dz
gt
u
dt
u
� �
=-
� �
� �
� �
2
ln cosh
g
g
u
gt
z h
g
u
�
�
� �
= -
�
�
� �
� �
�
�
� �
�
�
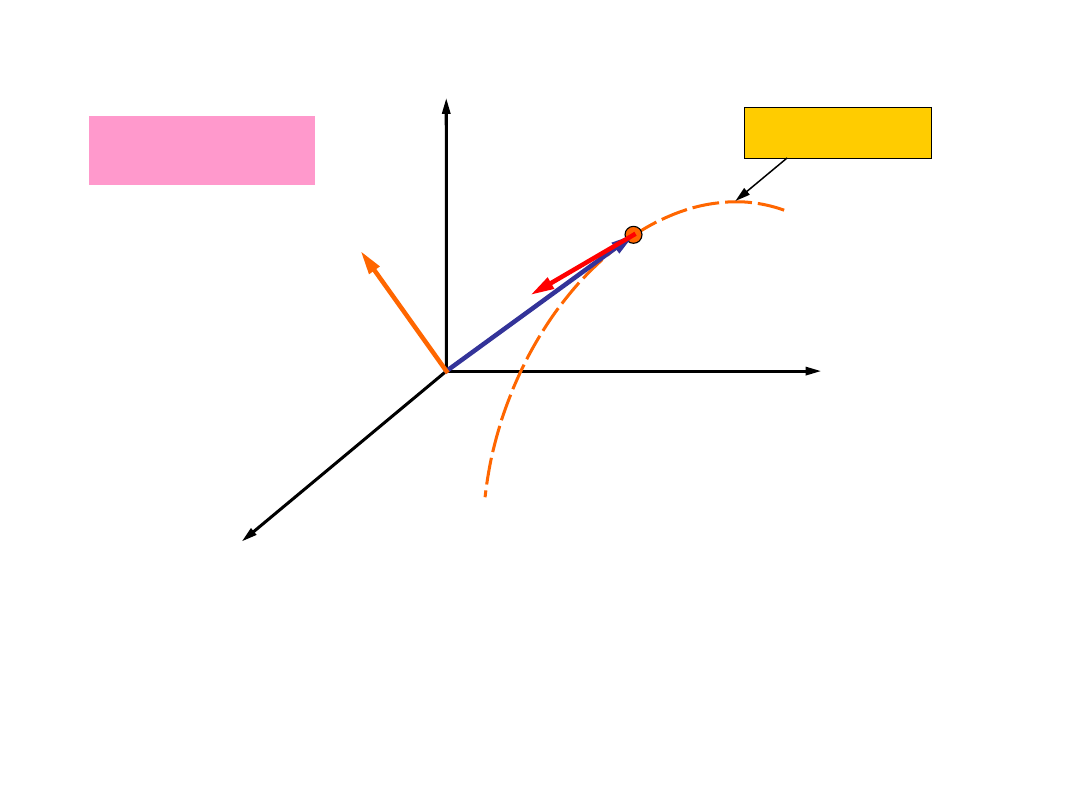
Równania ruchu punktu
materialnego
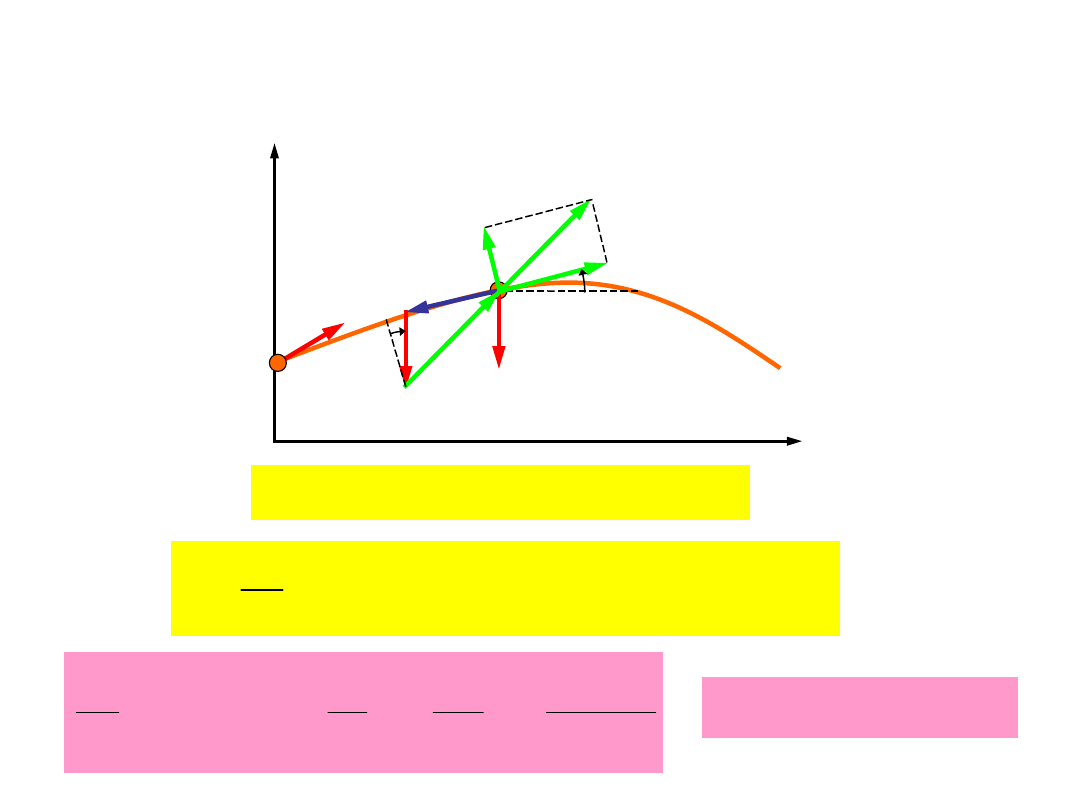
Przykład 3: Rzut ukośny z oporem
powietrza
G
y
0
u
r
R
F
B
F
Bs
F
Bn
a
x
sin ,
cos
Bs
Bn
F
R G
F
G
a
a
= +
=
2
sin ,
cos
du
m
cu
mg
mu
mg
dt
a
w
a
-
=
+
-
=
2
2
cos
sin
,
g
du
u
d
g
g
dt
u
dt
u
a
a
a
�
�
=-
+
=-
�
�
�
�
�
�
( )
( )
0
0
0
,
0
u
u a
a
=
=
a
a
Równania ruchu punktu
materialnego
2
2
cos
sin
,
g
du
u
d
g
g
dt
u
dt
u
a
a
a
�
�
=-
+
=-
�
�
�
�
�
�
( )
( )
0
0
0
0
0
,
0
, (0)
, (0)
u
u
x
x y
y
a
a
=
=
=
=
cos ,
sin
dx
dy
u
u
dt
dt
a
a
=
=
Równania ruchu punktu
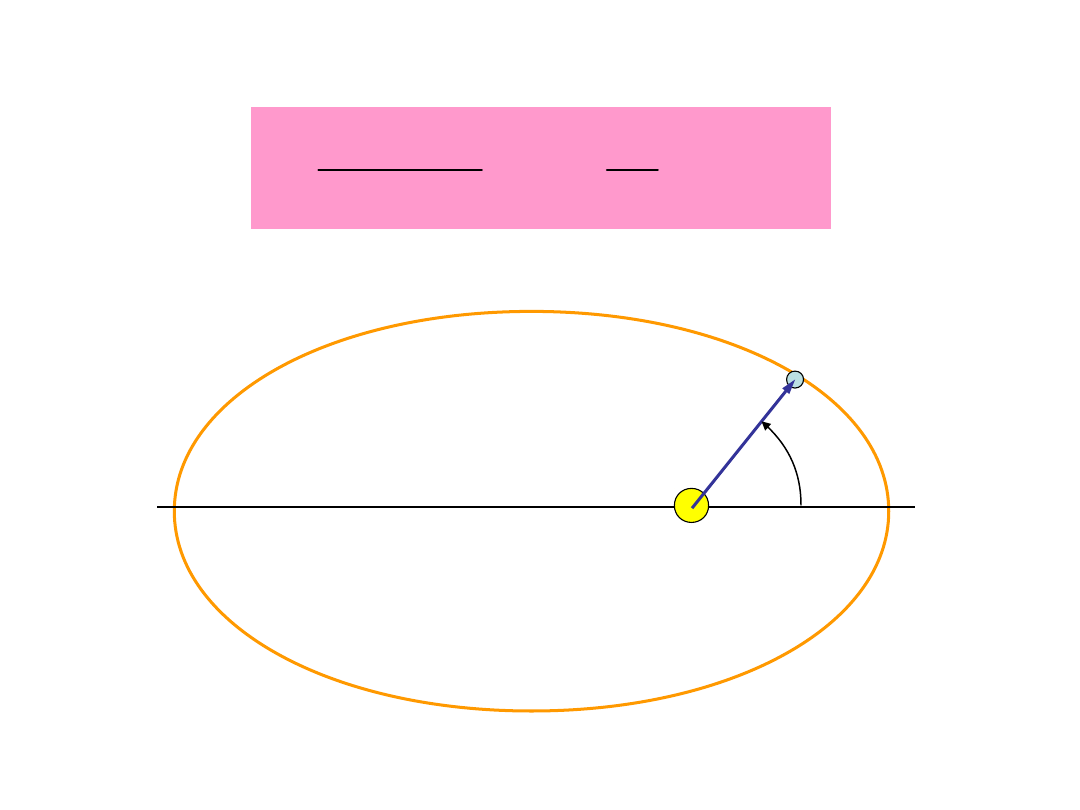
materialnego
Przykład 4: Ruch planet wokół
słońca
x
y
G
2
2
z
s
z
mm
Km
G k
r
r
=
=
( )
r t
r
z
ma G
=
r
r
Równania ruchu punktu
materialnego
x
y
x
x
h
h
1
1
2
e
a a a
u
w
= + +
�
r
r r
r
r
1
1
d
dr
u u
dt
dt
x
x
=
=
=
2
2
1
1
2
2
d
d r
a
a
dt
dt
x
x
=
=
=
1
dr
u i
dt
h
w
w
� =
r
r r
(
)
( )
2
e
n
s
a
a
a
i
r
i
r
x
h
w
e
= + = -
+
r
r
r
r
r
e
a
r
n
a
r
s
a
r
j
2
2
2
2
z
z
d r
d
Km
m
r
dt
dt
r
j
�
�
� �
-
=
�
�
� �
�
�
� �
�
�
2
2
2
0
d
d dr
r
dt
dt dt
j
j
+
=
Równania ruchu punktu
materialnego
2
2
2
2
d r
d
K
r
dt
dt
r
j
� �
-
=
� �
� �
2
2
2
0
d
d dr
r
dt
dt dt
j
j
+
=
2
0
d
d
r
dt
dt
j
�
�
=
�
�
�
�
2
d
r
C
dt
j
=
2
2
2
2
2
d r
C
K
r
dt
r
r
� �
-
=
� �
� �
2
2
2
3
2
d r C
K
dt
r
r
-
=
Równania ruchu punktu
materialnego
2
,
,
1
cos
p
C
r
p
e Ap
e
K
j
=
=
=
+
j

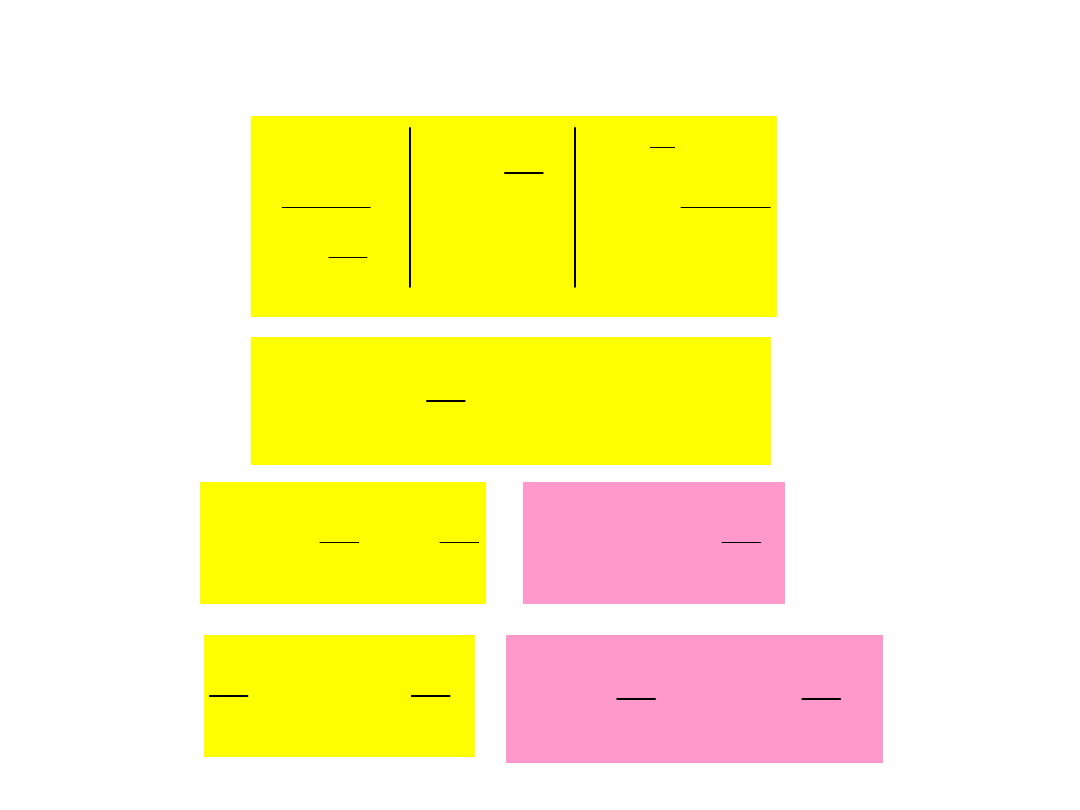
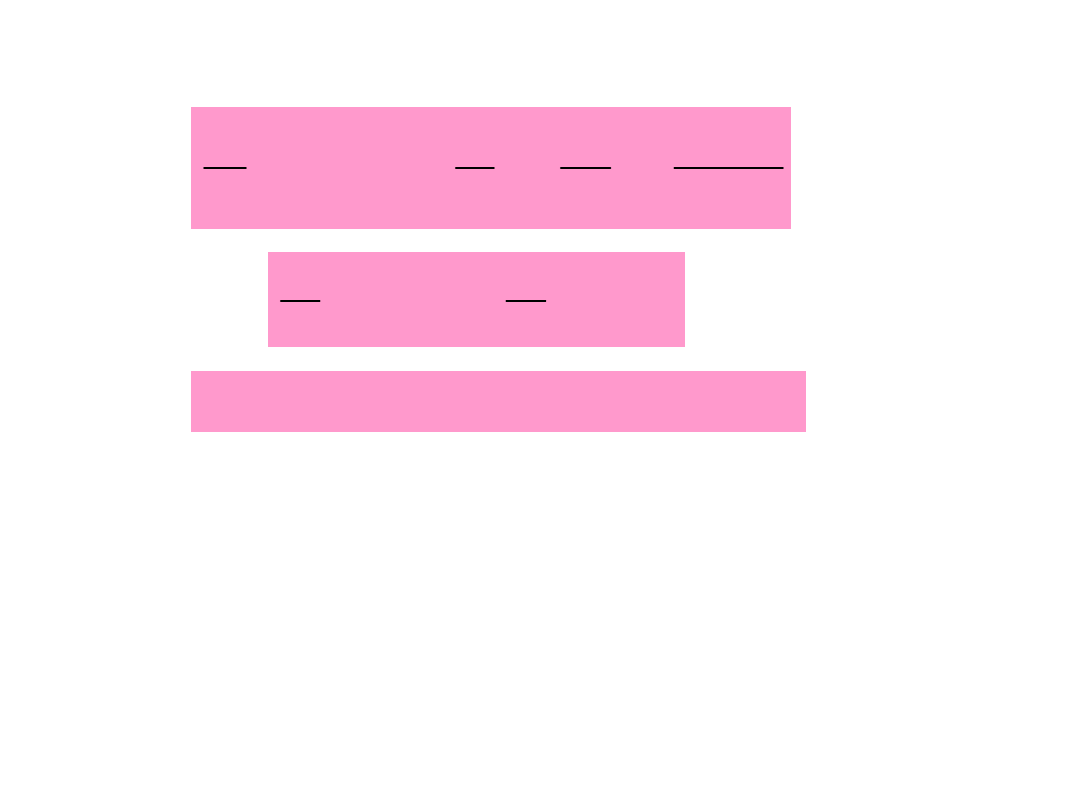
Pęd i
impuls
du
ma m
F
dt
=
=
r
r
r
(
)
d mu
dP
F
dt
dt
=
=
r
r
r
Wielkość wektorową o wartości równej iloczynowi
masy i wartości wektora prędkości oraz kierunku
i zwrocie
wektora prędkości nazywamy
pędem
.
dP Fdt
=
r
r
t
t
t
P
Fdt S
+D
D =
=
�
r
r
r
Całkę z siły po czasie nazywamy
impulsem siły
(popędem siły)
(
)
t
t
t
t
t
t
t
t
x
y
z
x
y
z
t
t
t
t
S
iF
jF
kF dt i
F dt j
F dt k
F dt
+D
+D
+D
+D
=
+
+
=
+
+
�
�
�
�
r
r
r
r
r
r
r
Pęd i
impuls
0
( )
P t
r
x
y
z
(
)
P t
t
+D
r
A
B
hodograf pędu
tor punktu
S
r
( )
P t
r
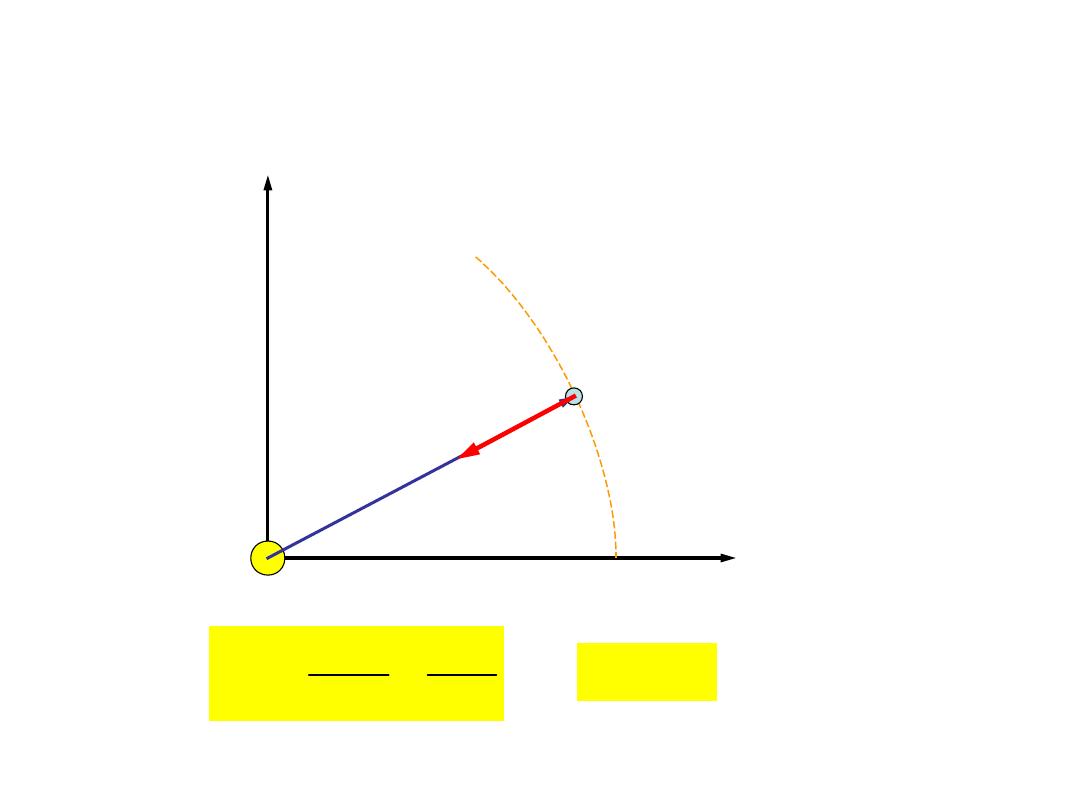
Moment pędu
(kręt)
0
( )
P t
r
x
y
z
A
tor punktu
( )
r t
r
0
( )
K
r P t
= �
r
r
r
0
( )
K t
r
Momentem pędu
(krętem)
względem bieguna 0
nazywamy wektor wyrażony iloczynem wektorowym
promienia wodzącego i wektora pędu.
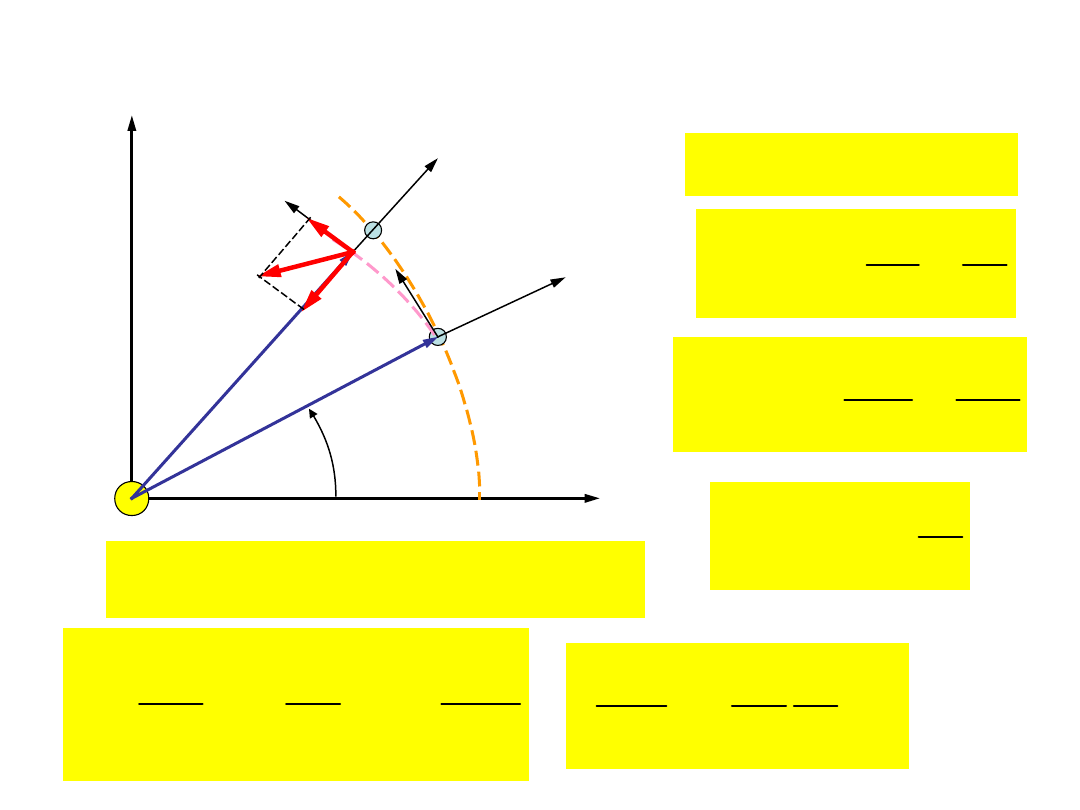
Moment pędu
(kręt)
(
)
0
( )
dK
d
dr
dP
r P
P t
r
dt
dt
dt
dt
=
� =
�
+ �
r
r
r
r
r
r
r
0
( )
dK
u P t
r F
dt
= �
+ �
r
r
r
r
r
( )
( ) 0
u P t
u P t
=
r
r
r
r
0
0
dK
r F M
dt
= � =
r
r
r
r
Pochodna momentu pędu punktu materialnego
względem bieguna 0 równa jest momentowi
wypadkowej siły działającej na ten punkt względem
bieguna 0.
Praca i energia
mechaniczna
0
( )
r t
r
A
y
A
x
A
z
x
y
z
F
r
s
F
r
s
dL F ds
=
a
cos
dL F
ds
a
=
dL F ds
= �
r
r
ds dr
=
r
r
dL F dr
= �
r
r
x
y
z
dL F dx F dy F dz
=
+
+
B
B
B
A
A
A
x
y
z
AB
x
y
z
x
y
z
L
F dx
F dy
F dx
=
+
+
�
�
�
A
B
Praca i energia
mechaniczna
0
( )
r t
r
A
y
A
x
A
z
x
y
z
G
r
(
)
B
A
z
AB
B
A
z
L
mgdz
mg z
z
=-
=-
-
�
A
B
0
0
x
y
z
F
F
F
G
mg
=
=
= =-
Praca siły ciężkości nie zależy od drogi, a jedynie od
różnicy wysokości początkowego i końcowego punktu
ruchu punktu materialnego.

Praca i energia
mechaniczna
AB
B
A
pA
pB
L
mgz
mgz
E
E
=-
+
=
-
Praca siły ciężkości równa jest różnicy
energii
potencjalnej
punktu materialnego w początkowym i
końcowym punkcie drogi punktu.
Praca i energia
mechaniczna
cos
cos
dL F
ds F
udt
a
a
=
=
dL F udt
= �
r r
(
)
x x
y y
z z
dL
F u
F u
F u dt
=
+
+
(
)
B
A
t
AB
x x
y y
z z
t
L
F u
F u
F u dt
=
+
+
�
dL
N
F u
dt
=
= �
r r
Moc:
Praca i energia
mechaniczna
s
s
dL Fudt ma udt
=
=
(
)
2
1
2
k
du
dL m
udt d mu
dE
dt
=
=
=
AB
kB
kA
L
E
E
=
-
Zmiana energii kinetycznej punktu materialnego
równa jest pracy wykonanej na tym punkcie przez
siły działające na ten punkt.
Gdy punkt materialny porusza się jedynie pod
wpływem siły ciężkości:
kB
kA
pA
pB
E
E
E
E
-
=
-
kB
pB
kA
pA
E
E
E
E
+
=
+
const
k
p
E E
E
= +
=
Praca i energia
mechaniczna
0
( )
r t
r
A
y
A
x
A
z
x
y
z
G
r
B
A
z
kB
kA
AB
pA
pB
z
AB
AB
E
E
L
mgdz
R ds E
E
Rds
-
=
=-
+
� =
-
-
�
�
�
r
r
A
B
R
r
siła oporu powietrza

Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
Wyszukiwarka
Podobne podstrony:
Mechanika techniczna(12)
Mechanika techniczna(1)
Mechanika Techniczna I Skrypt 2 4 Kinematyka
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Ostwald M Podstawy mechaniki Mechanika techniczna
Tarcie, Materiały, Inżynieria Środowiska, Semestr 2, Mechanika techniczna, egzaminy
Maszyny-koło projekt, Technologia chemiczna, Maszynoznawstwo i mechanika techniczna, ogólne materiał
TARCIE, PW Transport, Gadżety i pomoce PW CD2, MECHANIKA, MECHANIKA !!, mechanika techniczna - labor
Mechanika Techniczna I Opracowanie 06
Mechanika Techniczna I Skrypt 1 2 1 Okreslenie i rodz
Mechanika Techniczna I Statyka Płaski Układ Sił
mechanika techniczna, kolo mohra
opracowanie 4 mechan
więcej podobnych podstron