
Regresja liniowa wielokrotna
0
1
2
( , )
( |
)
( )
x z
E Y X
a
a x a z
h
=
= =
= +
+
x
x
x
(
)
(
)
2
0
1
2
1
2
0
1
2
0
1
2
1
( , , )
( )
( , , )
n
i
i
i
n
i
i
i
i
S a a a
x
y
S a a a
a
a x a z y
h
=
=
=
-
=
+
+
-
�
�
Funkcja kryterialna:
Kryterium wyznaczenia
rozwiązania a
0
, a
1
, a
2
:
0 1 2
, ,
0 1 2
( , , )
min
a a a
S a a a

(
)
(
)
(
)
(
)
(
)
(
)
(
)
2
2
0
1
2
0
1
2
1
1
0
0
0
0
1
2
0
1
2
0
1
2
1
1
0
0
1
2
0
1
2
1
1
1
1
1
0
1
2
2
1
2
2
1 2
2
2
2
2
n
n
i
i
i
i
i
i
i
i
n
n
i
i
i
i
i
i
i
i
i
i
i
n
n
n
n
n
i
i
i
i
i
i
i
i
i
i
i
S
a
a x a z y
a
a x a z y
a
a
a
a
a x a z y
a
a x a z y
a
a x a z y
a
a
a x a z y
a
a
x
a
z
y
na
a
=
=
=
=
=
=
=
=
=
�
�
�
�
�
=
+
+
-
=
+
+
-
�
�
�
�
�
�
�
�
=
+
+
-
+
+
-
=
+
+
-
�
=
+
+
-
=
+
+
-
=
=
+
�
�
�
�
�
�
�
�
�
2
1
1
1
0
1
2
1
1
1
2
2
0
n
n
n
n
n
i
i
i
i
i
i
n
i
i
i
i
i
i
na
x
a
a
x a
z
y
z
y
=
=
=
=
=
=
+
-
=
+
+
=
�
�
�
�
� �
(
)
(
)
(
)
(
)
(
)
(
)
2
2
0
1
2
0
1
2
1
1
1
1
1
0
1
2
0
1
2
0
1
2
1
1
1
2
0
1
2
1
1
1
1
2
0
1
2
1
1
2
2
2
2
2
2
0
n
n
i
i
i
i
i
i
i
i
n
n
i
i
i
i
i
i
i
i
i
i
i
i
n
n
n
n
i
i
i i
n
n
i
i
i
i
i i
i
i
i
i
a
x
S
a
a x a z y
a
a x a z y
a
a
a
a
a x a z y
a
a x a z y
a
a x a z y x
a
a
x
a
x
a
z x
y
a
x
x
a
=
=
=
=
=
=
=
=
=
=
�
�
�
�
�
=
+
+
-
=
+
+
-
�
�
�
�
�
�
�
�
=
+
+
-
+
+
-
=
+
+
+
+
-
�
=
+
+
-
=
�
�
�
�
�
�
�
�
�
�
1
1
n
n
i i
i i
i
i
z x
y x
=
=
=
�
�

(
)
(
)
(
)
(
)
(
)
(
)
2
2
0
1
2
0
1
2
1
1
2
2
2
0
1
2
0
1
2
0
1
2
1
1
2
2
0
1
2
1
1
0
1
1
1
1
1
2
2
2
2
2
2
0
n
n
i
i
i
i
i
i
i
i
n
n
i
i
i
i
i
i
i
i
i
i
i
i
n
n
n
n
i
i i
i
n
n
i
i i
i
i
i i
i
i
i
i
S
a
a x a z y
a
a x a z y
a
a
a
a
a x a z y
a
a x a z y
a
a x a z y z
a
a
a
z
a
z x
a
z a
z x
z
y z
a
=
=
=
=
=
=
=
=
=
=
�
�
�
�
�
=
+
+
-
=
+
+
-
�
�
�
�
�
�
�
�
=
+
+
-
+
+
-
=
+
+
+
+
+
=
+
-
�
=
-
�
�
�
�
�
�
�
�
�
�
2
2
1
1
n
n
i
i i
i
i
z
y z
=
=
=
� �

0
1
2
1
1
1
2
0
1
2
1
1
1
1
2
0
1
2
1
1
1
1
n
n
n
i
i
i
i
i
i
n
n
n
n
i
i
i i
i i
i
i
i
i
n
n
n
n
i
i i
i
i i
i
i
i
i
na
a
x a
z
y
a
x a
x
a
z x
y x
a
z a
z x a
z
y z
=
=
=
=
=
=
=
=
=
=
=
+
+
=
+
+
=
+
+
=
�
� �
�
�
�
�
�
�
� �
1
1
1
0
2
1
1
1
1
1
2
2
1
1
1
1
n
n
n
i
i
i
i
i
i
n
n
n
n
i
i
i i
i i
i
i
i
i
n
n
n
n
i
i i
i
i i
i
i
i
i
n
x
z
y
a
x
x
z x
a
y x
a
z
z x
z
y z
=
=
=
=
=
=
=
=
=
=
=
�
�
�
�
�
�
�
�
�
�
�
�
� �
�
�
�
�
� �
�
=
�
�
�
�
� �
�
�
�
�
� �
� �
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
� �
�
�
� �
�
�
Met. Najmniejszych Kwadratów
dla pomiarów bezpośrednich i
pośrednich
Postulat:
Wynik kolejnego pomiaru y
j
można uważać za sumę
wielkości
x – nieznanej (poszukiwanej wielkości podlegającej
pomiarowi)
oraz
j
- błędu pomiarowego
czyli
y
j
= x +
j
dla każdego j=1,...,n
Metoda
Najmniejszych
Kwadratów
postuluje
dobieranie tak wielkości
j
, aby suma kwadratów
błędów
j
była najmniejsza:
(
)
minimum
n
n
j
j
j
j
x y
=
=
e =
-
�
� �
2
2
1
1
Pomiary bezpośrednie
Przypadek równych błędów pomiarowych (pierwiastek z
wariancji
2
)
Wykonujemy n pomiarów nieznanej wielkości x. Wyniki
pomiarów obarczone są błędem pomiarowym
j
, o którym
zakładamy że ma rozkład normalny z wartością średnią równą
zeru:
y
j
= x +
j
E(
j
)=0
(wart. oczekiwana) E(
j
2
)=
2
(wariancja)
(założenie to – o rozkładzie – jest często uzasadnione przez
centralne twierdzenie graniczne).
Najlepszym estymatorem dla x jest średnia
arytmetyczną:
którego wariancja wyraża się
a identyfikując błąd z odchyleniem standardowym
otrzymujemy
n
j
j
x y
y
n
=
= =
�
1
1
%
( )
/
x
n
s
=s
2
2
%
/
x
n
d = s
2
Przypadek różnych błędów pomiarowych (pierwiastków z
wariancji
j
2
)
Wykonujemy n pomiarów nieznanej wielkości x. Wyniki
pomiarów obarczone są błędem pomiarowym
j
, o którym
zakładamy że ma rozkład normalny z wartością średnią równą
zeru:
y
j
= x +
j
E(
j
)=0
(wart. oczekiwana) E(
j
2
)=
j
2
=1/g
j
(wariancja)
Najlepszym estymatorem dla x jest (średnia ważona
pomiarów):
którego wariancja wyraża się
a estymatory błędów pomiarowych
mają rozkład normalny z wartością średnią równą zeru i
wariancją
j
2
, a to oznacza że wielkości pochodzą ze
standardowego rozkładu Gaussa N(0,1), co powoduje że suma ich
kwadratów
ma rozkład
2
o n-1 stopniach swobody. Własności te można
wykorzystać do weryfikacji słuszności założeń przy użyciu testu
2
.
/
n
n
j
j
j
j
j
x
g y
g
=
=
=
�
�
1
1
%
( )
n
n
j
j
j
j
x
g
-
-
=
=
�
� �
�
s
=
=
�
� �
�
�
�
s
�
�
�
�
�
�
1
1
2
2
1
1
1
%
j
j
y
x
e = - %
/
j
j
e s
%
(
)
(
)
/
(
)/
(
)
n
n
n
j
j
j
j
j
j
j
j
j
y
x
y
x g
=
=
=
�=
e s
=
-
s
=
-
�
�
�
2
2
2
1
1
1
%
%
%
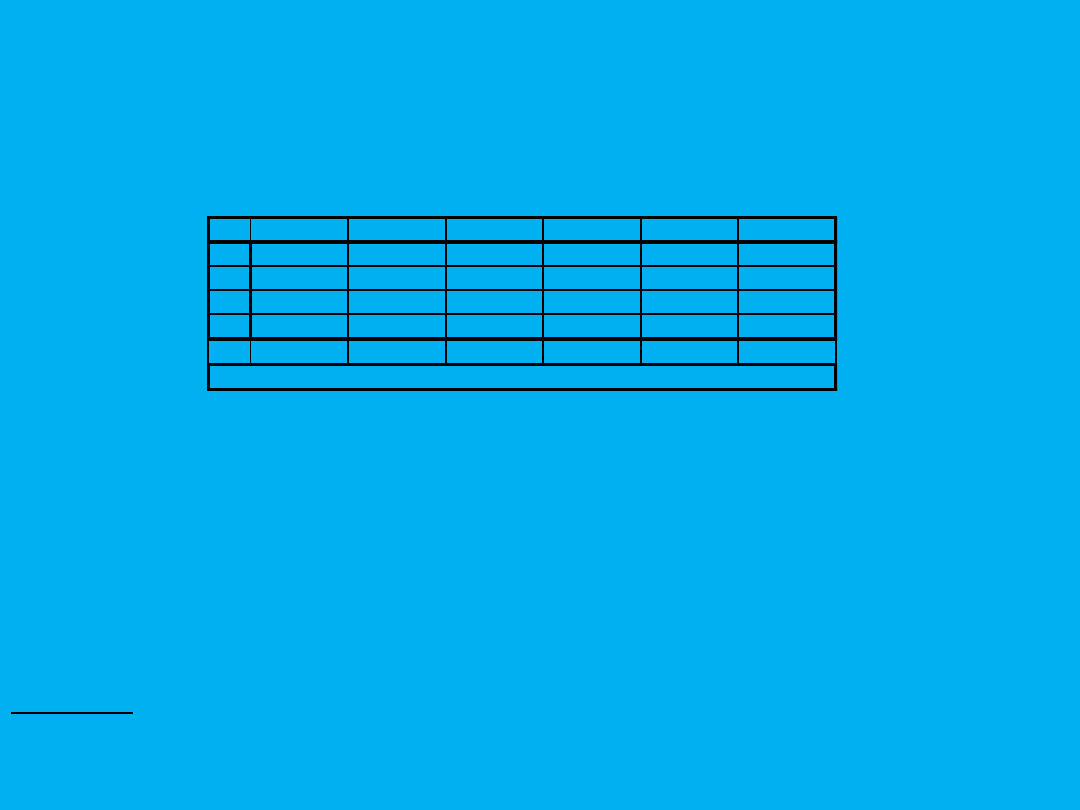
Przykład. Najlepsze wartości stałych fizycznych uzyskuje się przez
obliczanie średniej ważonej wszystkich pomiarów przeprowadzonych
przez
różne
ośrodki
naukowe-doświadczalne.
Dla
cząstek
elementarnych takie średnie są wyznaczane regularnie, bowiem
coraz bardziej doskonalone są metody pomiarowe. Np. średnia masa
neutralnego mezonu K uśredniono w oparciu o wyniki 4 doświadczeń
wykonanych różnymi technikami doświadczalnymi (tabela).
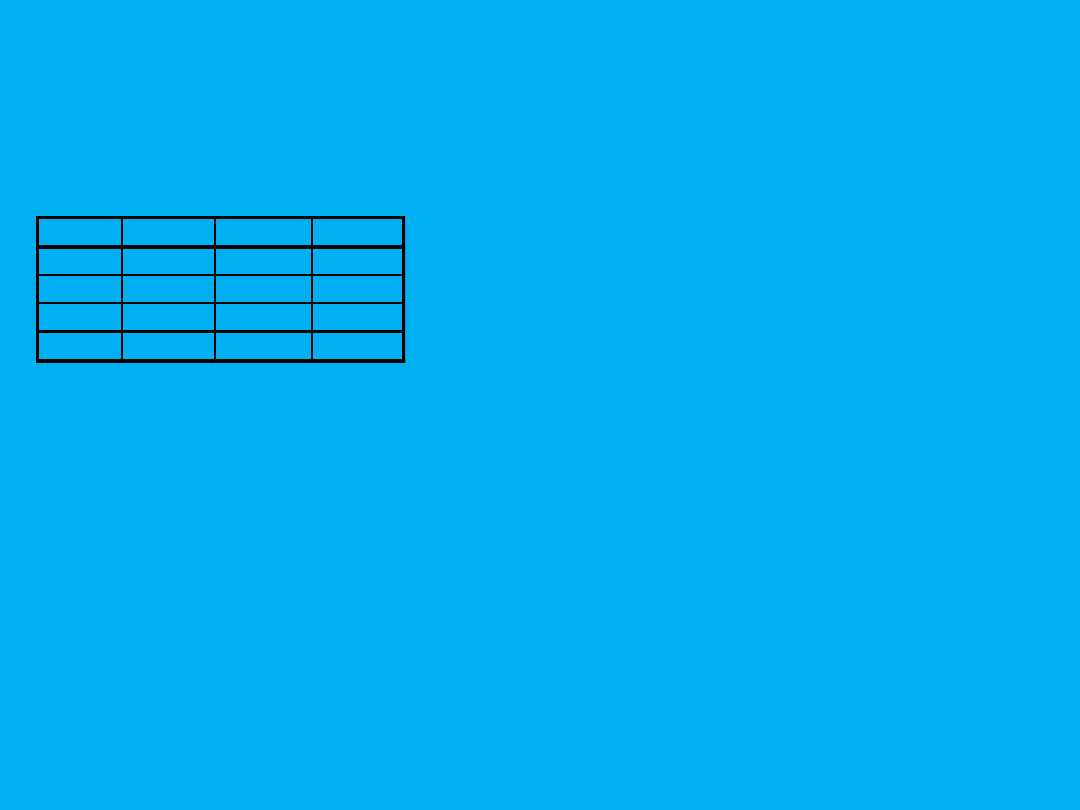
Wartość
min
wynosi w tym przykładzie 7.2 (tabela) . Dla poziomu
istotności 5%, oraz stopni swobody n-1=4-1=3 wartość krytyczna
2
=7.95. Wniosek: uważamy ze uzyskany wynik ( masa mezonu K =
497.9 0.2 MeV ) stanowi najlepszą wartość z poziomem ufności
95%. Tak pozostało do czasu (upłynęło 20 lat) gdy przeprowadzono
nowe doświadczenia i uzyskano wynik 497.671 0.030 MeV .
UWAGA: jeśli test
2
da rezultat negatywny (odrzucamy hipotezę o
dobrym dopasowaniu bowiem
2
>
2
kryt
) powodem tego może być
fakt, że co najmniej jeden z pomiarów jest obarczony błędem
systematycznym (nie o rozkładzie normalnym z wartością średnią 0)
.
Czasami niektóre pomiary odbiegają od innych. Usunięcie ich z
analizy pozwala na przyjęcie hipotezy zerowej, czyli test
2
daje
wynik pozytywny.
j
Yj
j
1/(j)^2=Gj
Yj*Gj
Yj-x
Gj(Yj-x)^2
1
498.10
0.40
6.30
3038.0
0.20
0.3
2
497.44
0.33
10.00
4974.4
-0.46
2.1
3
498.90
0.50
4.00
1995.6
1.00
4.0
4
497.44
0.50
4.00
1989.8
-0.46
0.8
24.30
11997.8
7.2
estymata x = YjGj/Gj = 497.9 bład x = 1/(Gj)=0.20
Pomiary pośrednie
Często, interesujące nas w pracy doświadczalnej wielkości, nie
podlegają bezpośredniemu pomiarowi. Np. w kinetyce
chemicznej stała szybkości reakcji opisywana jest zwykle równaniem
Arrheniusa
gdzie: Q jest energią aktywacji procesu chemicznego i nie podlega
bezpośredniemu
pomiarowi
K(T) – stała szybkości reakcji jako funkcja wyłącznie
temperatury (bezwzględnej) procesu,
R – uniwersalna stała gazowa
Badania kinetyczne prowadzi się zwykle dla szeregu dobranych
warunków izotermicznych (przy różnych wartościach temperatury
bezwzględnej) i dla wyznaczonych stałych szybkości reakcji
poszukuje się stałych k
0
i Q w równaniu Arrheniusa. Dla ułatwienia
wyznaczenia
tych
stałych,
równanie
to
po
obustronnym
zlogarytmowaniu uzyskuje liniową postać
gdzie:
( )
exp
Q
K T
k
RT
�
�
=
-
�
�
�
0
Y A Bt
= +
ln( ( )) ;
ln
;
;
/
Y
K T
A
k
t
B
Q R
T
=
=
=
=-
0
1
Uogólniamy zagadnienie pomiarów pośrednich w następujący
sposób.
Załóżmy, że interesuje nas wyznaczenie zespołu r nieznanych (a
priori) wielkości (x
1
,...,x
r
), które nie podlegają bezpośredniemu
pomiarowi. Wiemy zaś (lub postulujemy), że istnieje liniowy (bądź
nieliniowy) związek między nimi a pewną mierzalną zmienną
. Na
początek, rozpatrywać będziemy związek liniowy:
Jeśli wektor wartości wsp. a
jr
zapisać w notacji wektora
kolumnowego
to powyższe relacje można zapisać jako:
a po zdefiniowaniu macierzy i wektorów:
powyższy układ równań można zapisać (dla n dokonanych
pomiarów):
...
lub
...
j
j
j
jr r
j
j
j
j
jr r
p
p x
p x
f
a
a x
a x
h =
+
+ +
=h +
+
+ +
=
0
1 1
0
1 1
0
,
,...,
T
j
j
j
jr
a a
a
�
�
=�
�
1
2
a
,...,
T
j
j
j
j
f
a
j
n
=h +
+
=
=
0
a x 0
1
[
]
[
]
[
]
,...,
;
,...,
;
,...,
...
...
...
T
T
T
r
n
n
r
r
n
r
r
rr
r
x
x
a
a
f
a
a
a
f
a
a
a
f
a
a
a
=
= h
h
=
� �
�
� � �
� �
�
� � �
� �
�
� � �
=
=
=
� �
�
� � �
� �
�
� � �
�
� � �
� �
1
1
0
01
0
1
11
12
1
1
2
21
22
2
2
1
2
xη
a
a
a
A
f
a
M
M
M O
M
M
= + +
0
fη a
Ax
Zakładamy, zgodnie z założeniami ogólnymi, że każdy pomiar
zmiennej
o wartości y
j
jest obarczony błędem
j
o rozkładzie
normalnym ze średnią zero:
Zmienne y
j
są niezależne, stad związek między nimi jest wyrażony
zerowymi kowariancjami (cov(y
i
,y
j
)=0), a wtedy macierz kowariancji
zmierzonych wartości jest diagonalna, i także jej odwrotność zwana
macierzą wag pomiarów:
Wprowadzając wektor pomiarów i błędów:
Otrzymujemy układ równań
Poszukujemy rozwiązania tego układu przy warunku, że suma
kwadratów błędów
j
ważonych przez czynniki g
j
jest minimalna
(jednocześnie to statystyka
2
(n-r) dobroci dopasowania model do
danych):
( )
( )
;
;
/
j
j
j
j
j
j
j
y
E
E
g
=h +e
e =
e =s =
2
2
0
1
...
...
...
y
n
e
�
�
s
�
�
s
�
�
=
=
�
�
�
�
s
�
�
�
�
2
1
2
2
2
0
0
0
0
C
C
0
0
M M O
M
( )
( )
...
...
...
y
y
n
g
g
g
-
-
e
e
�
�
�
�
�
�
=
=
=
=
�
�
�
�
�
�
1
1
1
2
0
0
0
0
G
C
G
C
0
0
M M O
M
[
]
[
]
;
,...,
;
,...,
T
T
n
n
y
y
= +
=
= e
e
1
1
yη ε
y
ε
- + +
=
0
yε a
Ax 0
/
n
n
T
j
j
j j
y
j
j
g
=
=
�= e s =
e =
�
�
2
2
2
1
1
ε G ε
Stosując tzw. metodę mnożników Lagrangea można uzyskać
rozwiązanie tego zagadnienia ze względu na x, otrzymując wektor
estymat
z macierzą kowariancji wyznaczonych niewiadomych
Pierwiastki kwadratowe z elementów przekątni głównej można
utożsamiać z „ błędami pomiarowymi” estymat zmiennych x
i
, mimo
ze nie podlegały bezpośredniemu pomiarowi.
Wektor estymat błędów pomiarowych przyjmuje wartość
a wektor dopasowanych wartości pomiarów ( estymaty również)
z macierzą kowariancji
W ramach pracy własnej, proszę sobie udowodnić, że gdy r=1
( pomiary bezpośrednie o indywidualnej dokładności
j
2
)
(
)
(
)
T
T
y
y
-
=-
+
1
0
x
A G A
A G y a
%
( )
(
)
T
y
-
-
=
=
1
1
x
x
C
G
A G A
%
%
(
)
(
) (
)
T
T
y
y
-
=
+ + =-
+
+ +
1
0
0
0
ε Ax y a
A A G A
A G y a
y a
%
%
(
)
(
)
T
T
y
y
-
= - =
+
-
1
0
0
η y ε A A G A
A G y a
a
%
%
( )
(
)
( )
T
T
T
y
-
-
-
=
=
=
1
1
1
η
η
x
C
G
A A G A
A
A G
A
%
%
%
/
;
/
/
/
n
n
n
n
n
T
y
j
j
j
j
j
j
j
j
j
j
j
j
x
y
g y
g
-
=
=
=
=
=
�
� �
�
=
s
=
s
s
=
�
� �
�
�
� �
�
�
�
�
�
�
1
2
2
2
1
1
1
1
1
A G A
1
1
%
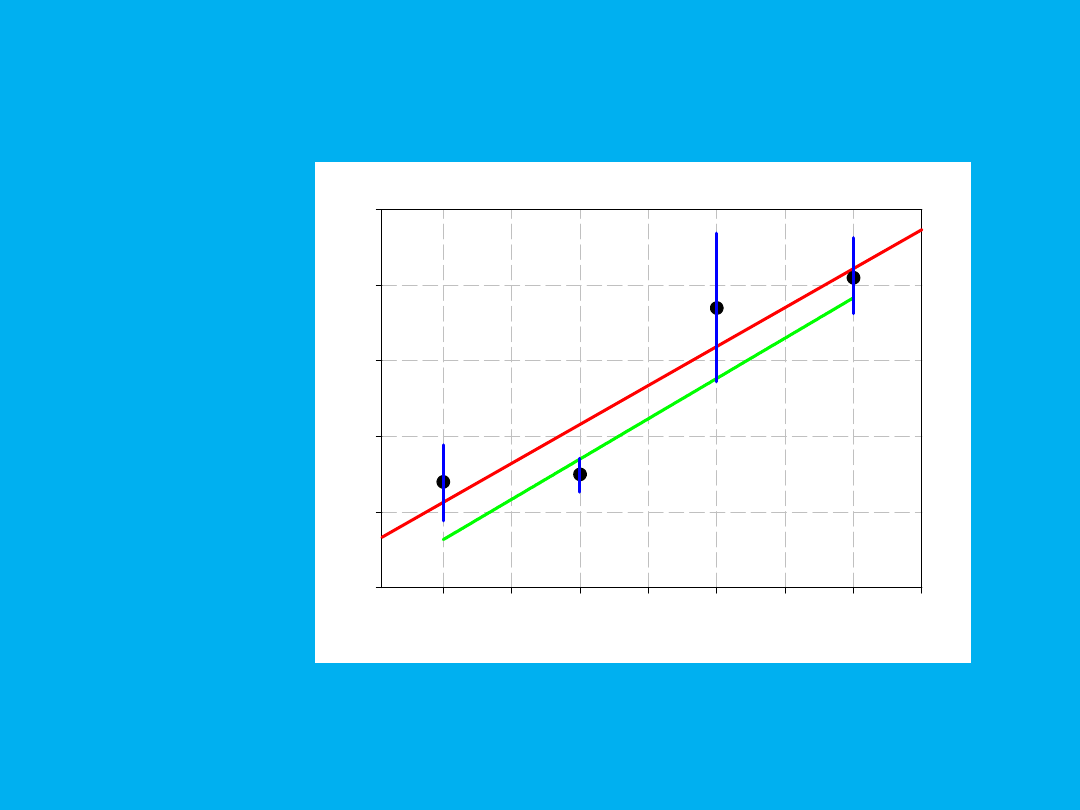
Przykład. Dopasowanie linii prostej.
Niech zbiór wartości y
j
, pochodzący z pomiaru bezpośredniego,
odpowiada zbiorowi wartości t
j
(znanych dokładnie – tzw. zmienna
kontrolowana t). Jeżeli t
i
, co się zdarza nader często, jest również
obarczone błędami,, to dopasowanie prostej staje się problemem
nieliniowych, osobno omawianym.
Obliczenia macierzowe dają następujące wyniki:
;
,...,
;
macierzowo
j
j
j
j
y
x x t
j
n
x x
h = - e = +
=
-
+
=
=
1
2
1
2
0
1
η
t 0
a
0
j
t
y
1
0.0
1.4
0.5
2
1.0
1.5
0.2
3
2.0
3.7
1.0
4
3.0
4.1
0.5
(
)
.
.
.
.
T
T
T
y
y
y
t
t
t
t
-
-
-
-
�
� �
�
�
�
�
� �
�
�
�
-
-
-
-
-
-
-
-
-
�
�
�
�
�
�
�
� �
�
�
�
=
=
=
=
=
=
=
�
�
�
�
�
�
�
� �
�
�
�
-
-
-
-
-
-
-
-
�
�
�
�
�
�
�
� �
�
�
�
-
-
-
-
�
�
�
�
�
�
1
1
2
x
3
4
1
1 0
4 0 0 0
1
1
1
1
1
1
1
0 25 0 0
34 39
0094
0057
A
A
G
A G A
C
A G A
1
1
2
0
1
2
3
0 0 1 0
39 65
0057 0049
1
1
3
0 0 0 4
%
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
-
-
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
�
=
d =
=-
=
=
d =
�
�
�
�
�
�
�
�
-
�
�
�
�
�
�
�
�
-
�
�
�
�
�
η
0636
0094 0038
0019
0076
031
0636
0307
1702
0038 0031 0023
0016
017
x
xη
Ax
C
η
1066
0222
2768
0019 0023 0065
0107
026
3834
0076 0016 0107
0199
045
%
%
%
%
%
�
�
�
�
�
�
�
�
�
�
Minimum funkcji kryterialnej = 4.507, dobroć dopasowania dla
l.st.sw.=4-2=2 testujemy względem
2
kryt
(0.05,2)=5.99. Wniosek:
nie ma podstaw do podważenia dobrego dopasowania linii prostej
do danych empirycznych (poziom ufności dopasowania 95%,
poziom istotności 5%).
t
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
y
0
1
2
3
4
5
Linia czerwona - regresja z jednakowymi b�
�dami y=1.130+1.030*t
linia zielona - regresja z r�znymi b�
�dami y=0.636+1.066*t
Należy zwrócić uwagę, na fakt że błędy po dokonaniu dopasowania
(błędy a posteriori) są mniejsze niż błędy wyjściowe. Poniżej
porównanie 2 linii regresji, czerwona dla jednakowych błędów
wielkości mierzonych ( błędów a priori), zielona dla zróżnicowanych
błędów.
Wykonanie obliczeń przedstawione w pliku: Dopasowanie_liniowe.xls
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
Wyszukiwarka
Podobne podstrony:
STAT 2010 W11
W12 Jezyk2 2010
spis lab I sem 2010
2010 ZMP studenci
W4 2010
wyklad 14 15 2010
W 8 Hormony 2010 2011
RI 12 2010 wspolczesne koncepcje
2009 2010 Autorytet
wyklad 2 2010
Wykład 3 powtórzenie 2010 studenci (1)
PD W1 Wprowadzenie do PD(2010 10 02) 1 1
BIOMATERIALY IV 2010
spis wykład I sem 2010
Wykład 5 2010 studenci
więcej podobnych podstron