
1
Automatyka
Wykład 14
Regulatory
2
Ze względu na własności dynamiczne rozróżnia się cztery rodzaje regulatorów liniowych:
• proporcjonalne (typu P),
• proporcjonalno-całkujące (typu PI),
• proporcjonalno-różniczkujące (typu PD),
• proporcjonalno-całkująco-różniczkujące (typu PID).
Regulator proporcjonalny (P)
)
(
)
(
t
e
k
t
u
p
)
(
)
(
t
k
t
h
p
1
)
(
)
(
s
E
k
s
U
p
p
k
s
E
s
U
)
(
)
(
p
r
k
s
G
)
(
p
r
k
j
G
)
(
3
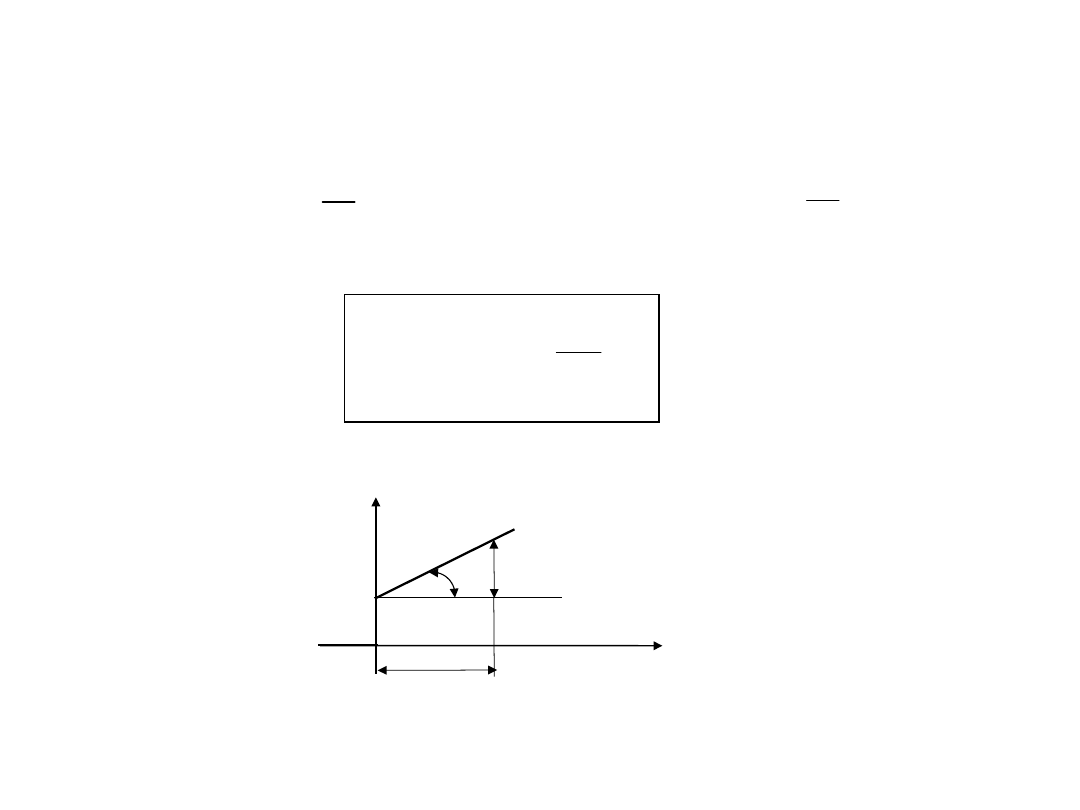
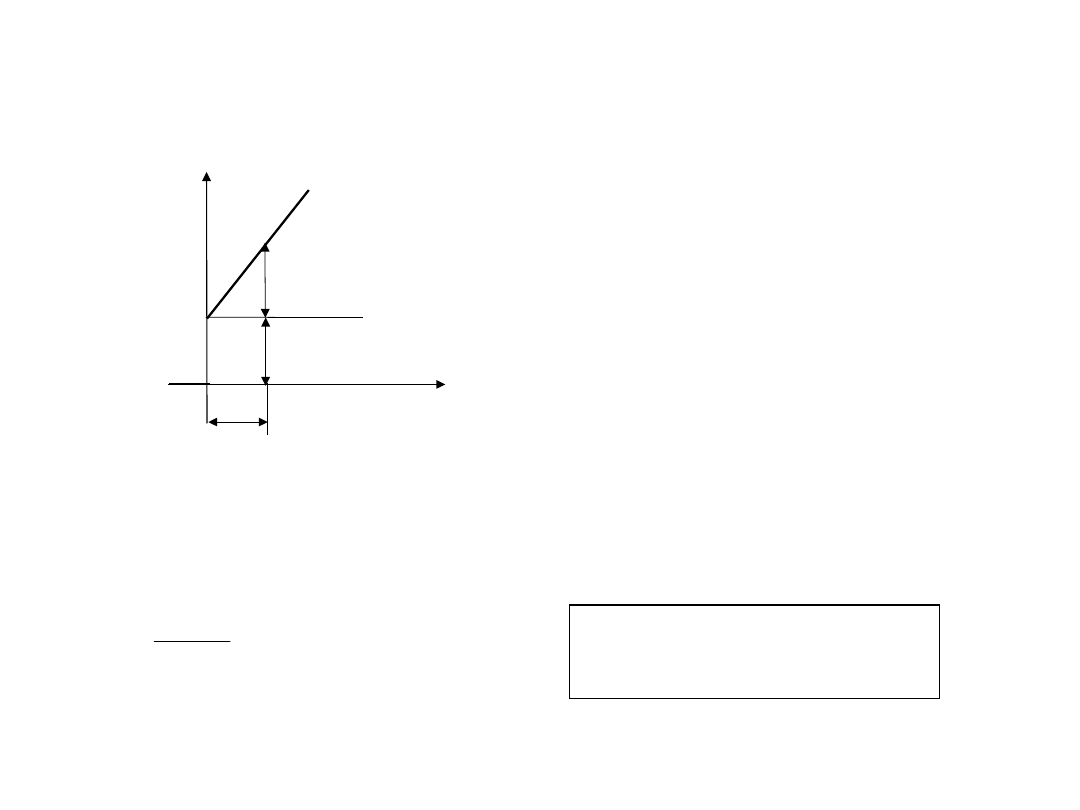
Regulator proporcjonalno-całkujący (PI)
t
i
p
d
e
T
t
e
k
t
u
0
)
(
1
)
(
)
(
t
i
p
d
T
t
k
t
h
0
)
(
1
)
(
)
(
1
1
t
T
k
k
t
h
i
p
p
)
(
h
k
p
k
p
T
i
t
0
4
)
(
1
)
(
)
(
s
E
s
T
s
E
k
s
U
i
p
s
T
k
s
E
s
U
i
p
1
1
)
(
)
(
s
T
k
s
G
i
p
r
1
1
)
(
j
T
k
j
G
i
r
r
1
1
)
(
k
p
Im[G
r
(j
)
]
Re[G
r
(j
)
]
=
0
5
Charakterystyki logarytmiczne regulatora PI
i
p
r
T
j
k
j
G
1
1
)
(
i
T
j
i
p
r
e
T
k
j
G
1
ctg
ar
2
2
1
1
)
(
i
T
j
e
i
T
i
T
r
k
j
r
G
1
ctg
ar
1
2
2
)
(
i
i
i
p
T
T
T
k
Lm
1
g
arct
)
(
1
log
20
)
(
2
2
=1/T
i
-45
o
-90
o
0
o
Lm()
[dB]
20log k
p
-20
dB/dek
()
6
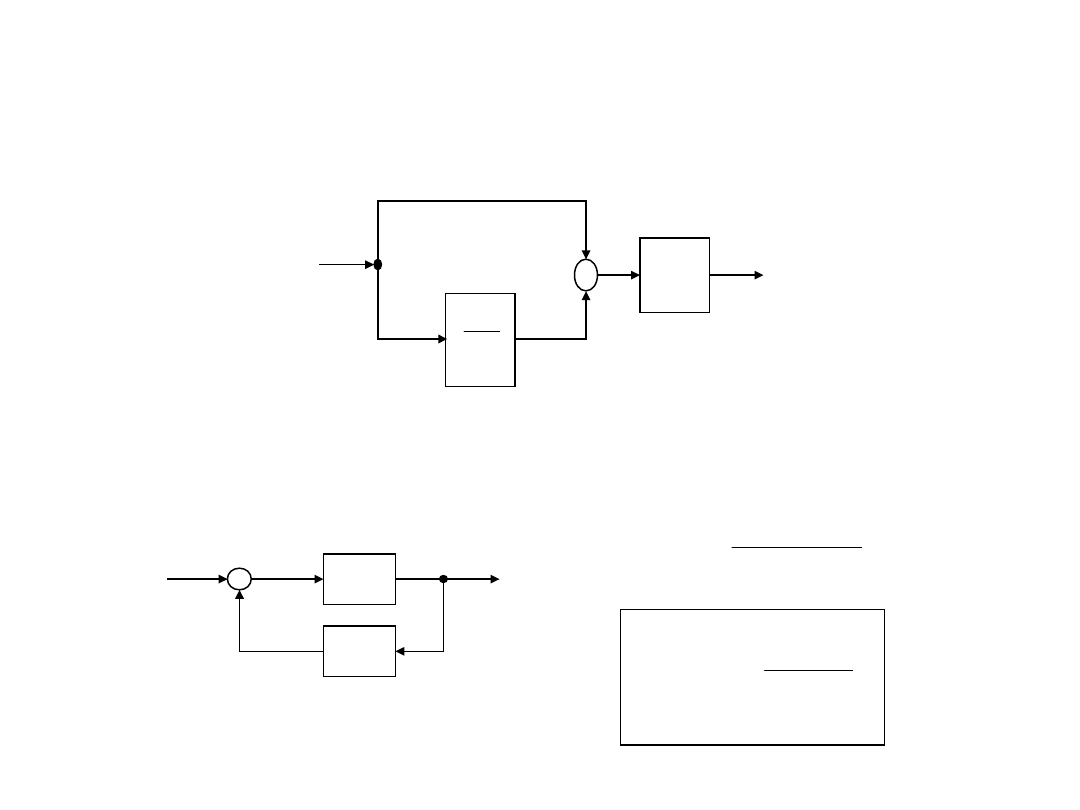
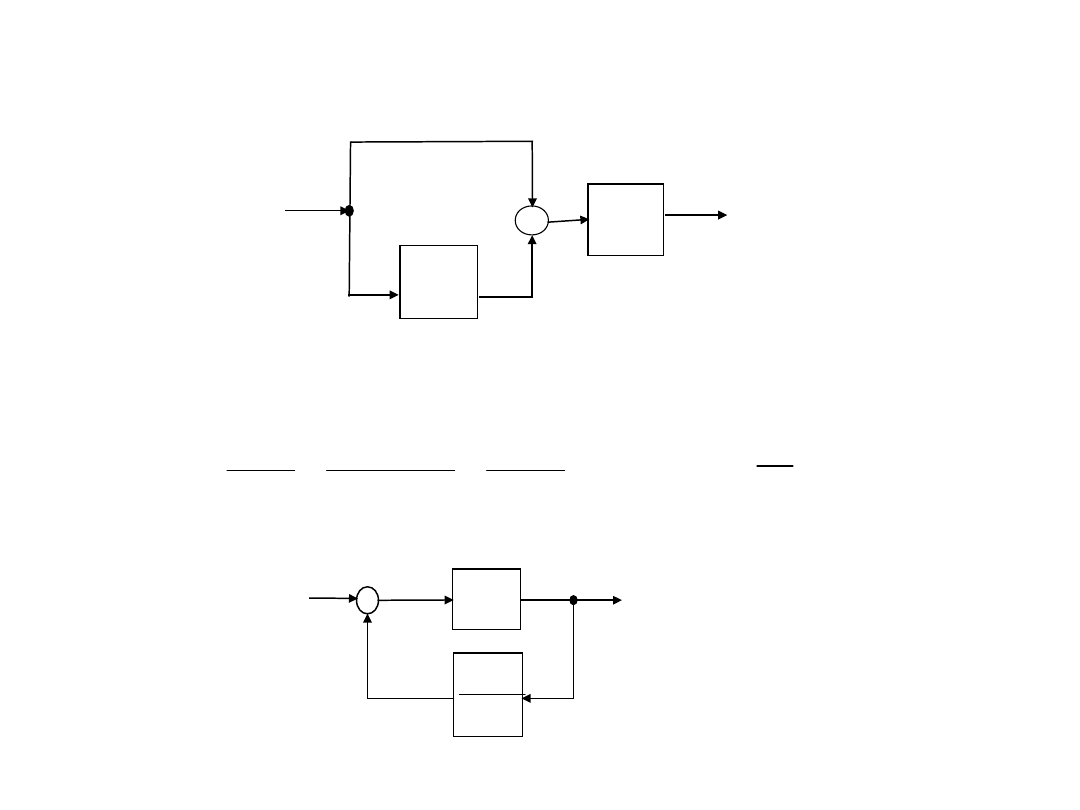
Struktury regulatora PI
• struktura równoległa
k
p
E(s)
U(s)
+
+
s
T
i
1
• struktura na wzmacniaczu o bardzo dużym
wzmocnieniu z ujemnym sprzężeniem zwrotnym
k
G
sp
(s)
_
E(s
)
U(s)
)
(
1
)
(
s
kG
k
s
G
sp
r
)
(
1
)
(
s
G
s
G
sp
r
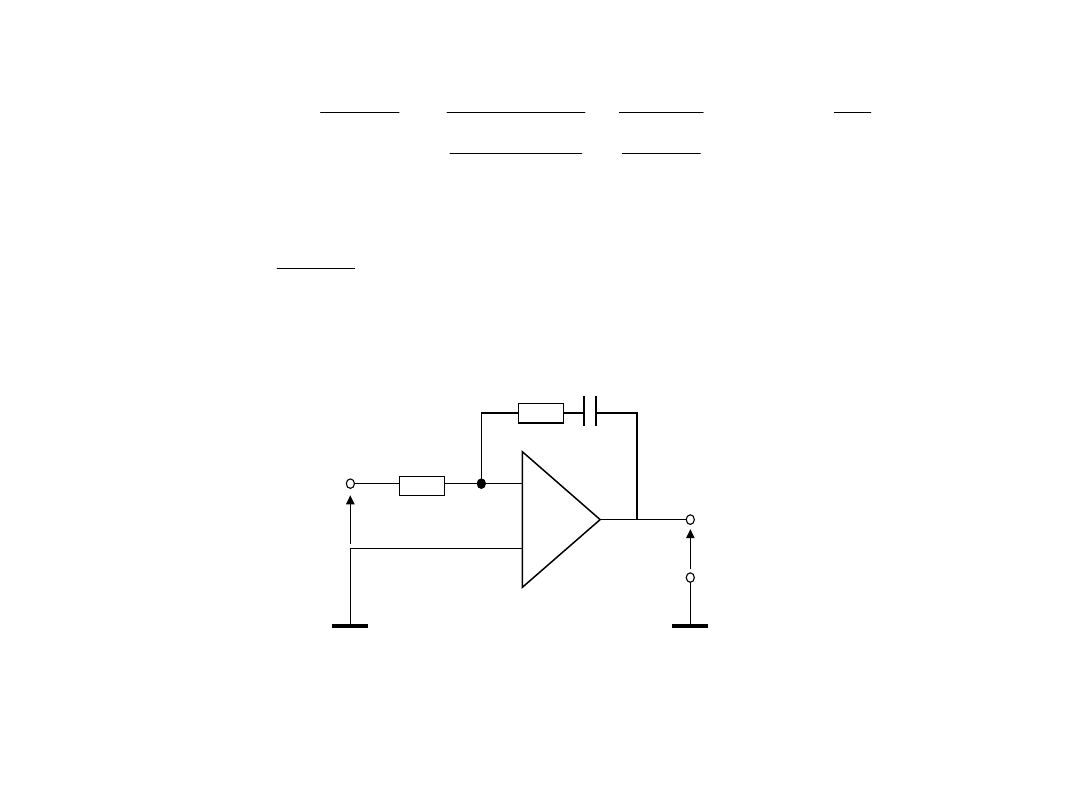
7
)
(
1
1
)
1
(
1
1
)
(
1
1
p
i
i
i
p
i
i
i
p
r
k
T
T
s
T
s
T
s
T
k
s
T
s
T
s
T
k
s
G
1
)
(
1
s
T
s
T
s
G
i
sp
_
+
R
1
U
we
(s)
U
wy
(s
)
R
2
C
8
)
(
1
)
(
2
wy
s
I
sC
R
s
U
)
(
)
(
1
we
s
I
R
s
U
)
(
)
(
)
(
we
wy
s
U
s
U
s
G
r
Cs
R
R
R
Cs
R
Cs
R
R
sC
R
s
G
r
2
1
2
1
2
1
2
1
1
1
1
)
(
C
R
T
R
R
k
i
p
2
1
2
9
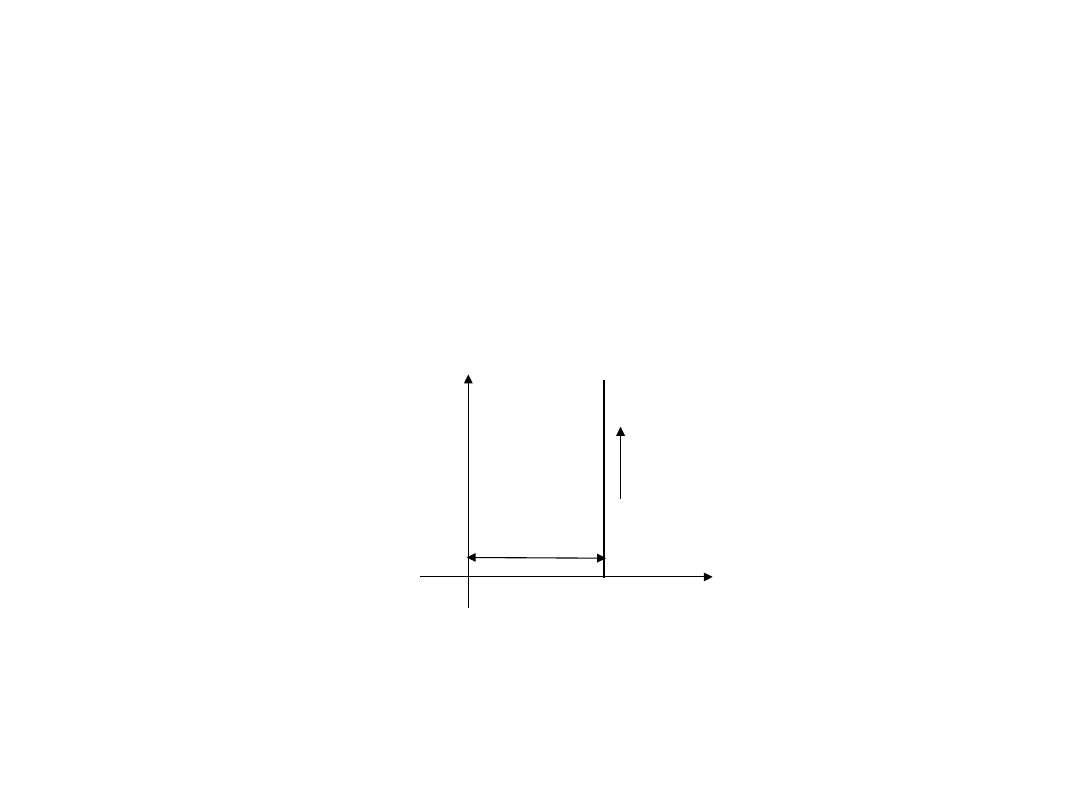
Regulator proporcjonalno-różniczkujący (PD)
dt
de
T
t
e
k
t
u
d
p
)
(
)
(
dt
t
d
T
t
k
t
h
d
p
)
(
)
(
)
(
1
1
)
(
)
(
)
(
t
T
t
k
t
h
d
p
1
t
0
k
p
h
10
t
t
e
)
(
Dla
)
(
)
(
t
T
t
k
t
u
d
p
1
0
k
p
T
d
T
d
t
u(t)
d
p
T
k
d
p
d
T
k
T
u
2
)
(
)
(
)
(
)
(
s
sE
T
s
E
k
s
U
d
p
Transmitancja operatorowa regulatora
PD
]
1
[
)
(
)
(
s
T
k
s
E
s
U
d
p
]
1
[
)
(
s
T
k
s
G
d
p
r
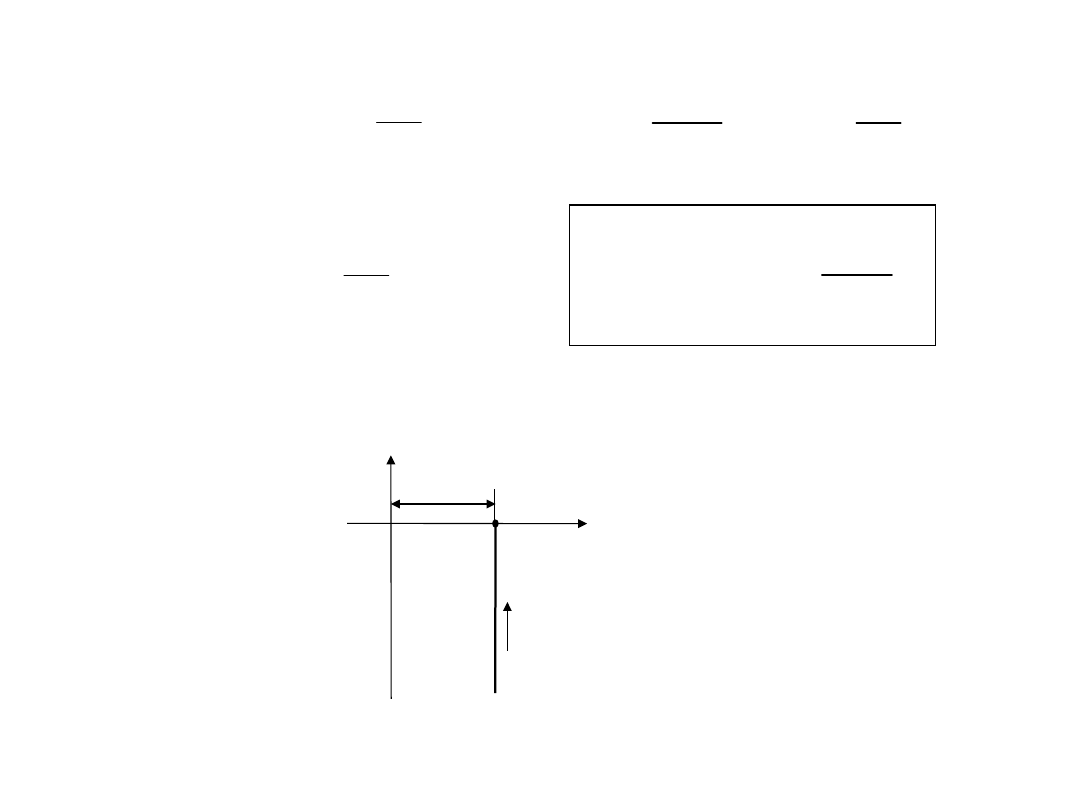
11
Transmitancja widmowa regulatora PD
)
1
(
)
(
d
p
r
jT
k
j
G
Charakterystyka amplitudowo-fazowa
Im[G
r
(j
)]
k
p
= 0
Re[G
r
(j
)
]
0
12
Charakterystyki logarytmiczne
2
)
(
1
log
20
)
(
d
p
T
k
Lm
)
(
g
t
arc
)
(
d
T
Lm(
)
[dB]
+20 dB/dek
()
=
1/T
d
45
o
0
o
90
o
20log
k
p
13
Struktury regulatora PD
• struktura równoległa
E(s)
U(s)
+
T
d
s
+
p
k
• struktura na wzmacniaczu o bardzo dużym
wzmocnieniu z ujemnym sprzężeniem zwrotnym
s
T
k
s
T
k
s
G
s
G
d
sp
d
p
r
sp
1
)
1
(
1
)
(
1
)
(
p
k
k
1
sp
k
_
E(s)
U(s)
s
T
k
d
sp
1
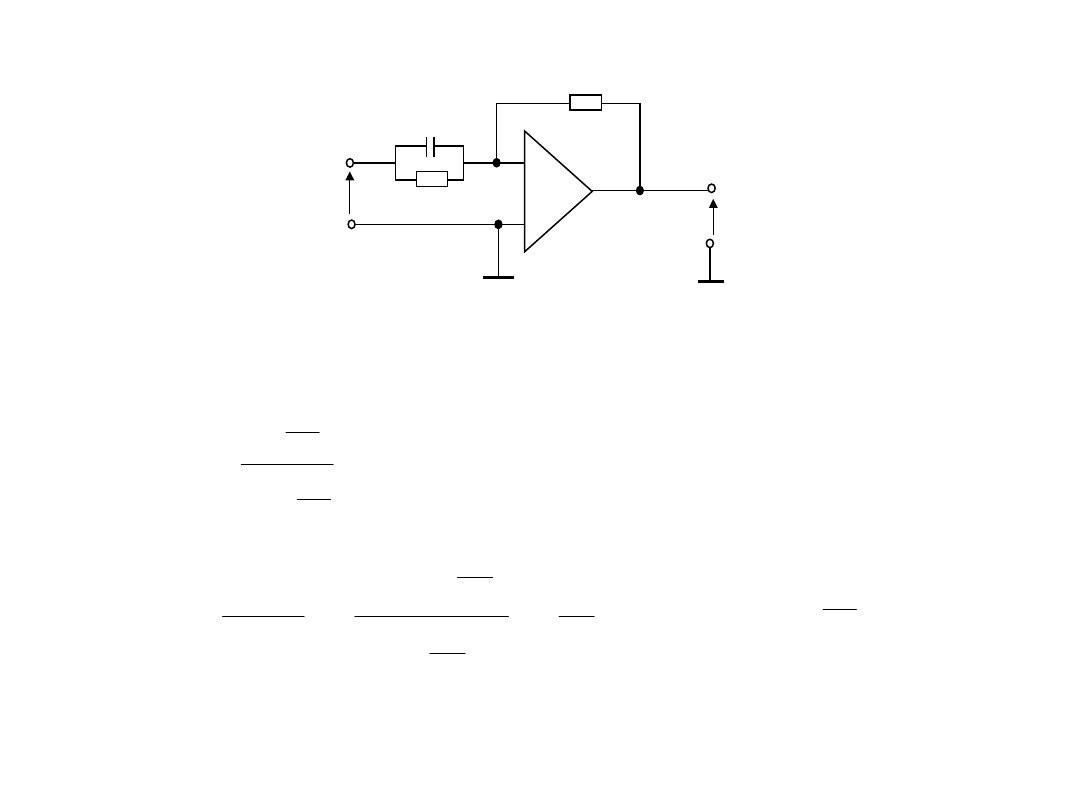
14
U
wy
(s)
R
1
C
R
2
U
we
(s)
_
+
)
(
)
(
2
wy
s
I
R
s
U
)
(
1
1
)
(
1
1
we
s
I
sC
R
sC
R
s
U
)
1
(
1
1
)
(
)
(
)
(
1
1
2
1
1
2
Cs
R
R
R
sC
R
sC
R
R
s
U
s
U
s
G
we
wy
r
C
R
T
R
R
k
d
p
1
1
2
15
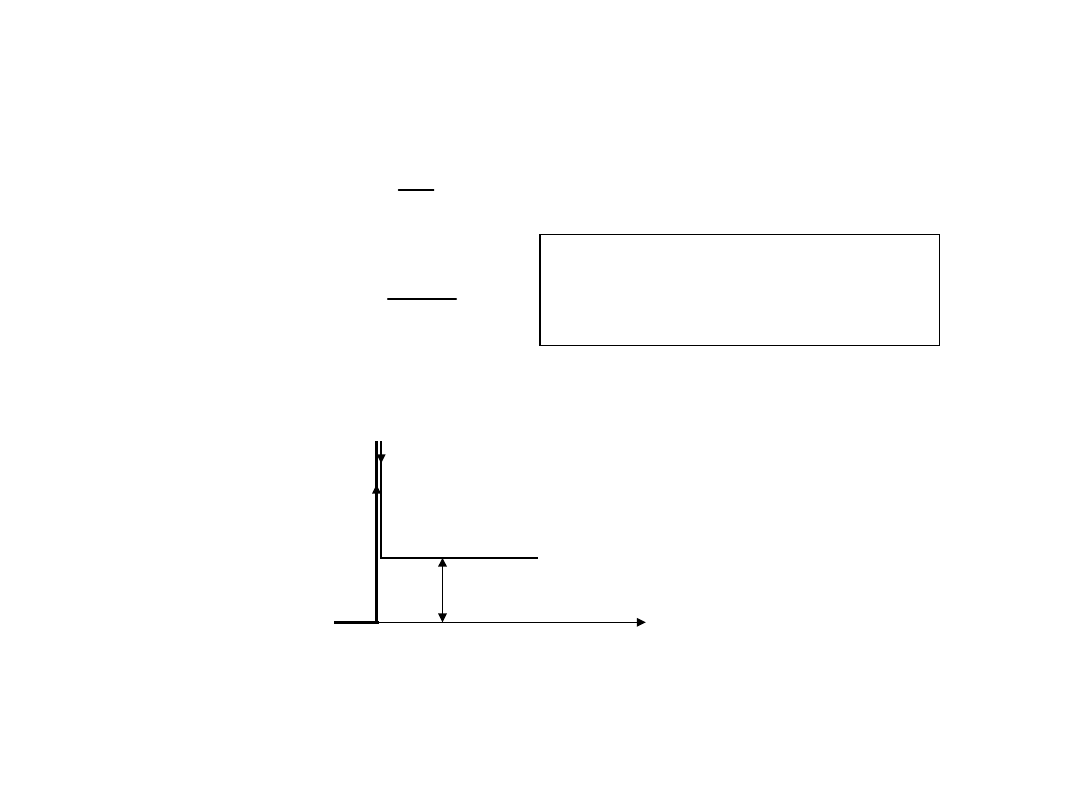
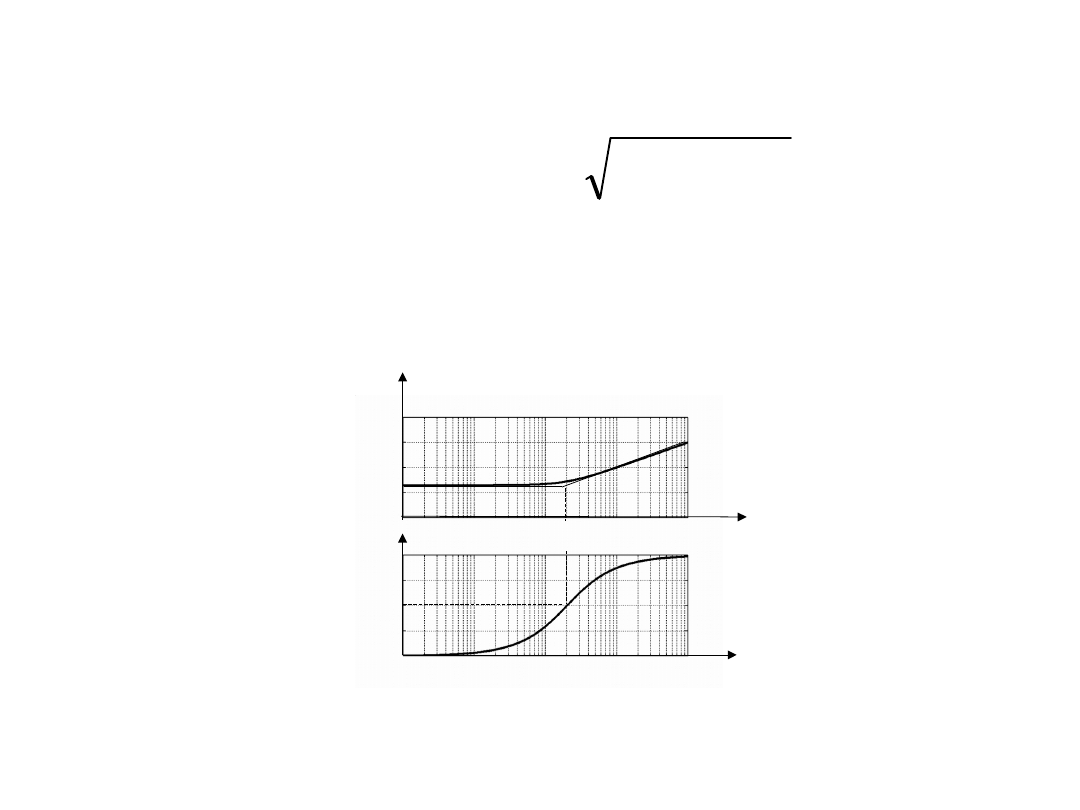
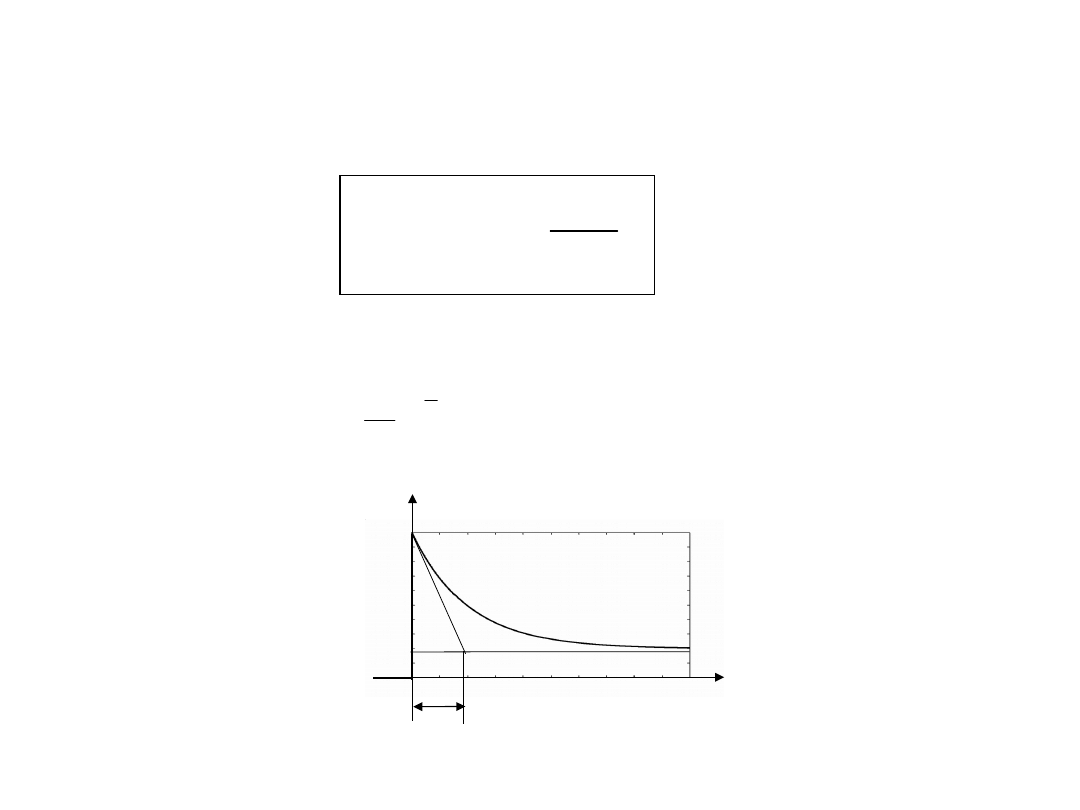
Regulator PD z inercją (rzeczywisty)
1
1
)
(
Ts
s
T
k
s
G
d
p
r
T
t
d
p
e
T
T
k
t
h
1
)
(
Odpowiedź
skokowa
Transmitancja operatorowa
t
0
k
p
T
h
16
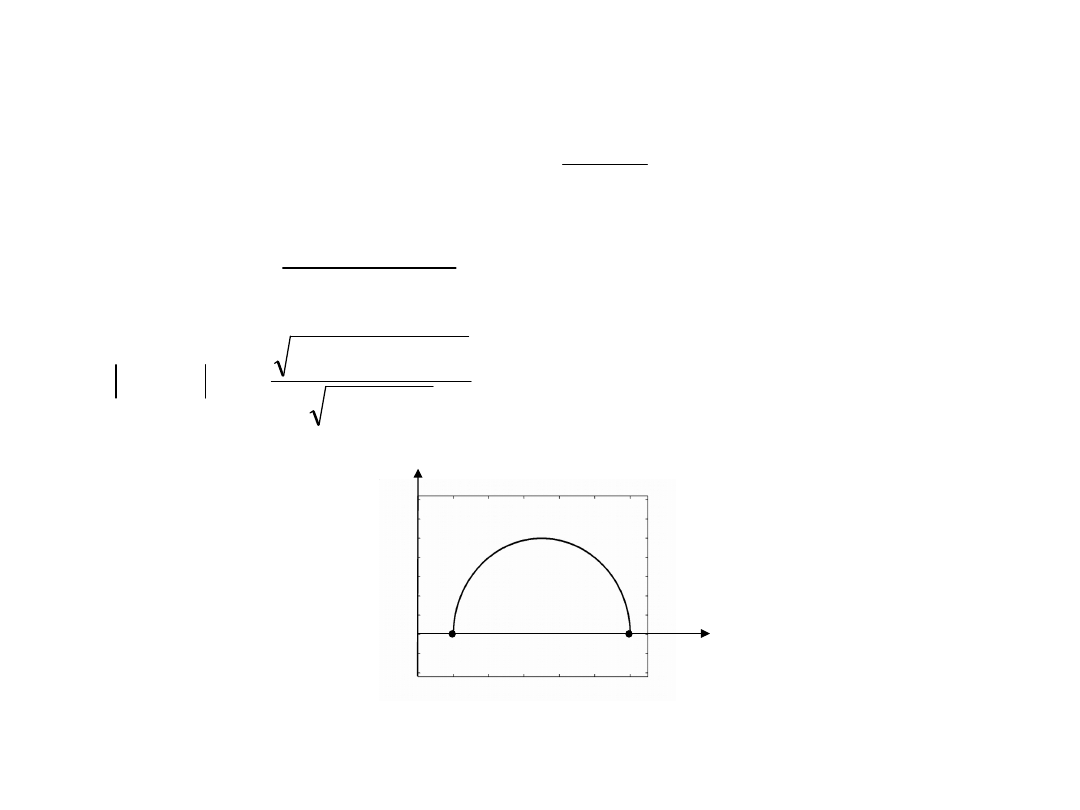
Charakterystyka amplitudowo-fazowa
1
1
)
(
Tj
j
T
k
j
G
d
p
r
T
j
T
T
j
k
j
G
d
p
r
1
)
(
1
)
(
2
2
2
)
(
1
)
(
1
)
(
T
T
T
k
j
G
d
p
r
)
tg(
arc
)]
(
tg[
arc
)
(
T
T
T
d
Im[G
r
]
Re[G
r
]
=
k
p
(1+T
d
/T)
=0
k
p
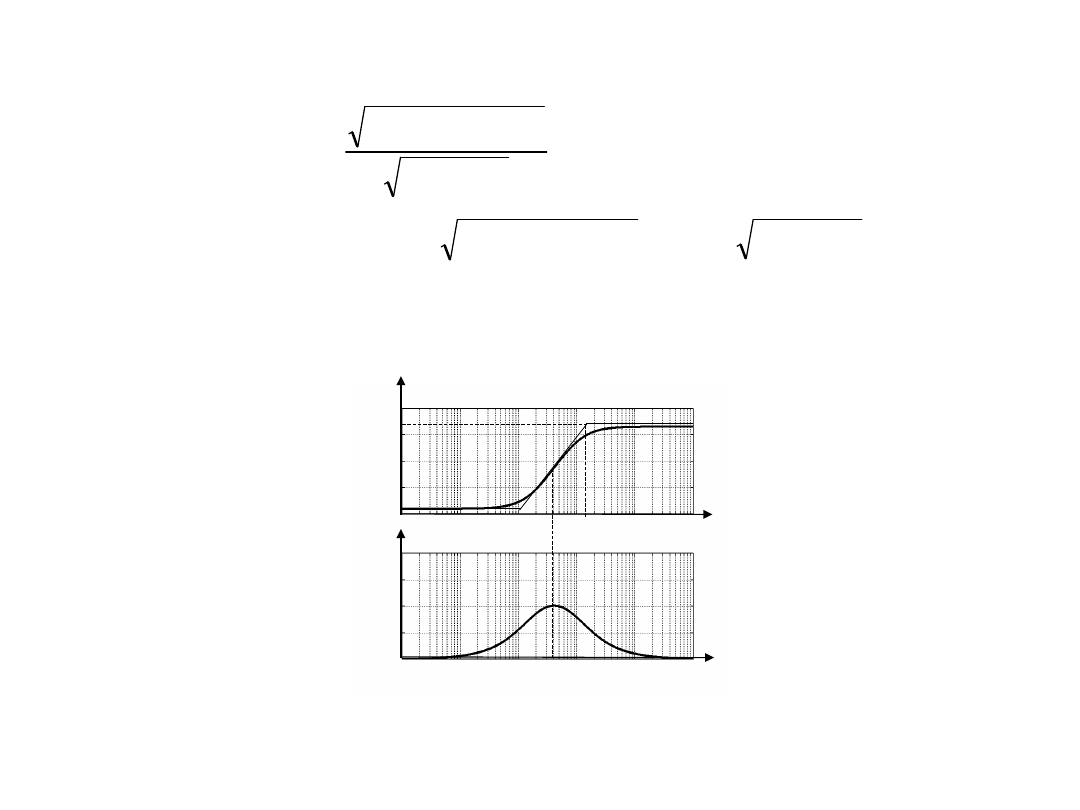
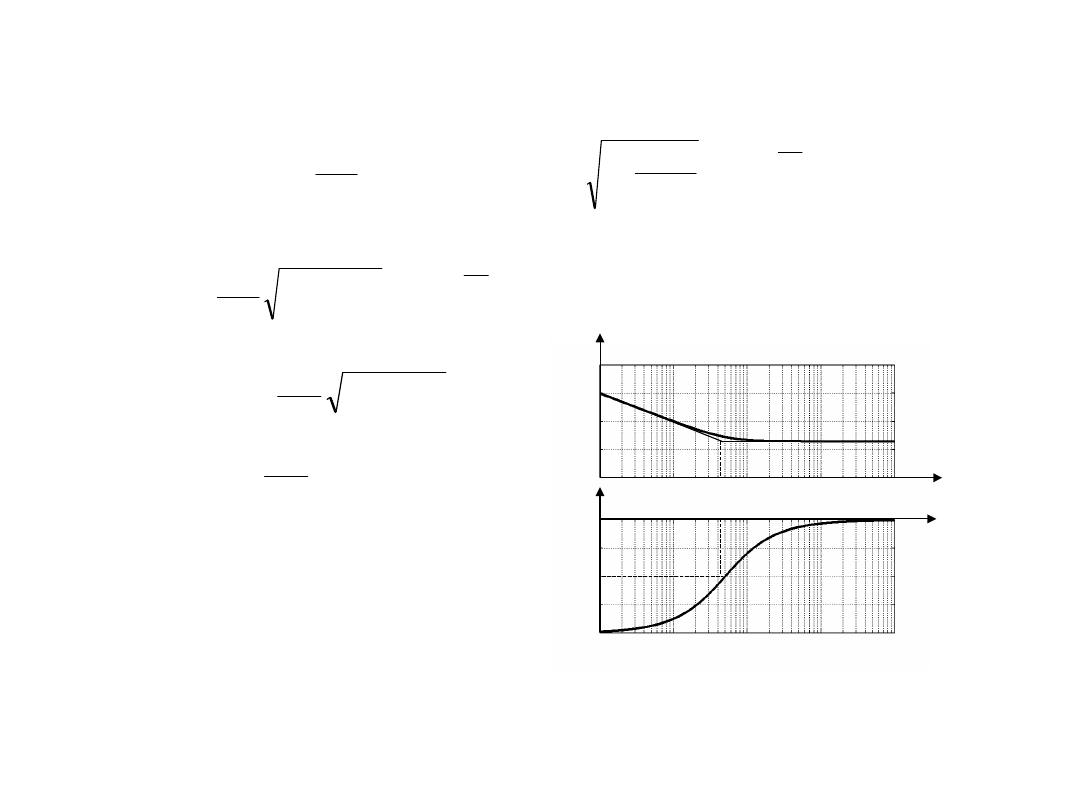
17
2
2
2
)
(
1
)
(
1
log
20
)
(
T
T
T
k
Lm
d
p
Charakterystyki logarytmiczne
2
2
2
)
(
1
log
20
)
(
1
log
20
log
20
)
(
T
T
T
k
Lm
d
p
)
tg(
arc
)]
(
tg[
arc
)
(
T
T
T
d
20log(k
p
+T
d
/T)
Lm(
)
()
1/T
1/
(T
d
+T)
p
k
log
20
0
0
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
Wyszukiwarka
Podobne podstrony:
AutomatykaII 14
AutomatykaII 14
Saba Schwarzwald Automatic 14 V Schematic
wyniki 03-02-14 automatyka i sterowanie
automatyka i sterowanie wyklad Nieznany (14)
Automatyka (wyk 14) szafy sterownicze ppt [tryb zgo
14 Stabilnosc, MiBM Politechnika Poznanska, IV semestr, automatyka, egzamin, pierdoly, Automatyka, A
Ćw 14, Automatyka
14 Instalowanie urządzeń automatyki
14, wojtek studia, Automatyka, studia 2010, obrona inz, Pytania na obrone, brak tematu , dyplomowka
14 automatic transaxle
14 Stosowanie ukladow automatyk Nieznany
14 uklady automatycznej regulacjiid 15571 ppt
automatyka i sterowanie wyklad 14
akumulator do skoda fabia combi 6y5 14 mpi 14 mpi automat
14 Stosowanie układów automatyki i sterowania
więcej podobnych podstron