
Elementy
wykonawcze
robotów
Sprawozdanie 4

Spis treści:
• określenie prędkości w programie SAM
• określenie prędkości metodą analityczną
• określenie siły chwytu
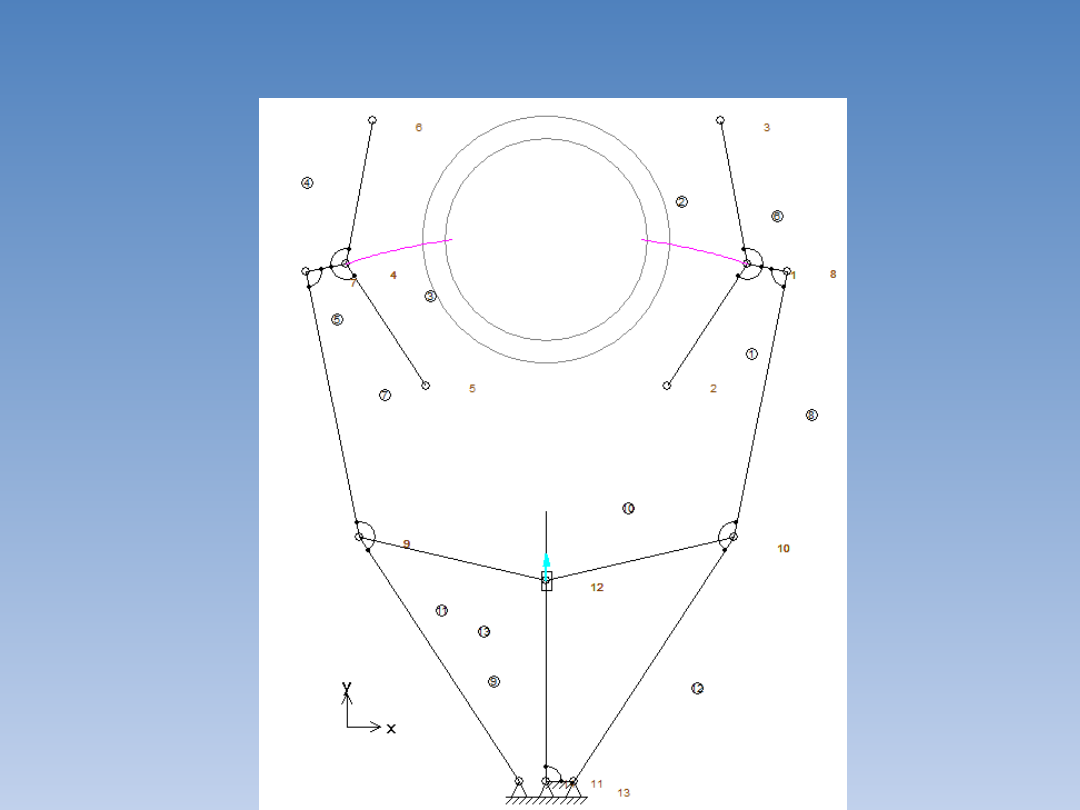
prędkość w programie SAM
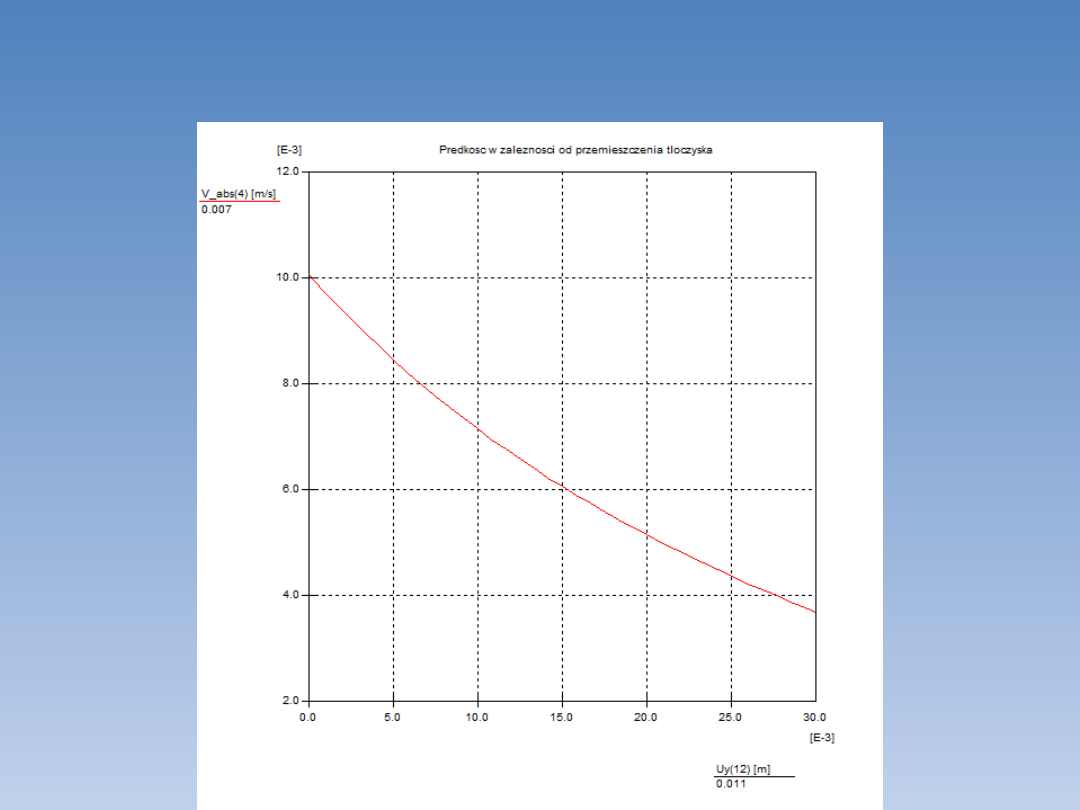
prędkość w programie SAM
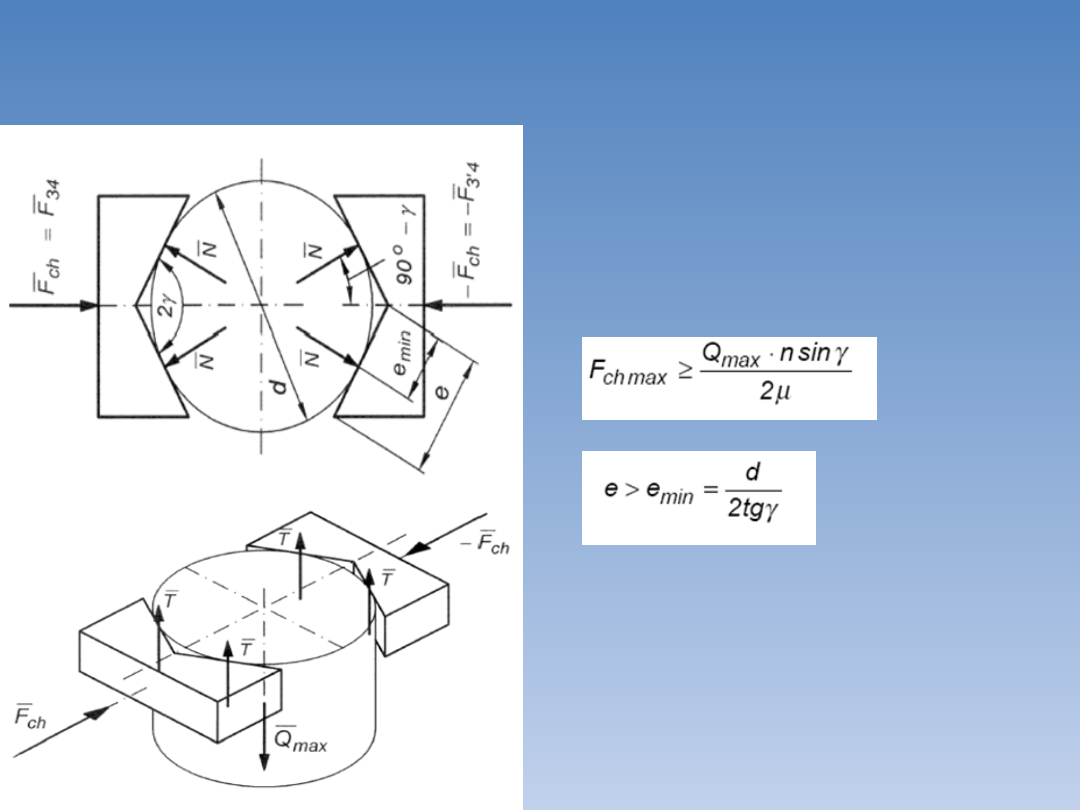
określenie siły chwytu

określenie siły chwytu
• d = od 149.4 do 182.6 mm
• Q = 36.93 N
• µ = 0.20 (przy zastosowaniu wkładki poliestrowej)
• n = 2
• 2ϒ = 136°
• F > 342,5 N
• e > 36,9 mm
Document Outline
- Slide 1
- Spis treści:
- prędkość w programie SAM
- prędkość w programie SAM
- określenie siły chwytu
- określenie siły chwytu
Wyszukiwarka
Podobne podstrony:
charakterystyka prędkościowa ZEW I ŚRUBOWA
5 1 Charakterystyki predkosciow Nieznany
Definicja charakterystyki prędkościowej silnika, MOTORYZACJA, ▼ Silniki Spalinowe ▼
Charakterystyka prędkościowa silnika spalinowego, Podstawy eksploatacji maszyn
charakterystyka prędkościowa
Charakterystyki prędkościowe, dzida, 7 - Sprężarki
charakterystyka prędkościowa ZEW I ŚRUBOWA
10 Wyznaczanie charakterystyki prędkościowej
obliczenia wyznaczanie charakteryst predkosciowej
5 1 Charakterystyki predkosciowe
Charakterystyka sprzęgła hydrokinetycznego przy stałej prędkości
6.Sprzęgła i napędy, Przekładnie, Podstawowa wielkoscia charakteryzujaca przekladnie jest przełożeni
Charakterystyka sprzęgła hydrokinetycznego przy stałej prędkości
Charakterystyki przesunieciowa i predkosciowa
01 AZE Badanie charakterystyk turbiny wiatrowej w funkcji predkosci wiatru 2012
Manewrowanie 2 Opory Predkosc Charakterystyki Standardy IMO
charakterystyka kuchni słowackiej
Najbardziej charakterystyczne odchylenia od stanu prawidłowego w badaniu
Charakterystyka rozwoju motorycznego
więcej podobnych podstron