Ćwiczenie 4
SIŁOWNIKI
Siłownik jest urządzeniem przetwarzającym sygnał wejściowy (np. napięcie lub ciśnienie - fizyczny charakter tego sygnału zależy od rodzaju siłownika) na przesunię-cie liniowe lub przesunięcie kątowe części ruchomej siłownika (trzpienia).
Ze względu na charakter sygnału wyjściowego, siłowniki dzieli się na:
ciągłe (analogowe) - trzpień siłownika może przyjąć (w sposób stabilny) każdą pozycję w zakresie ruchu trzpienia,
dyskretne (cyfrowe) - trzpień siłownika może przyjąć (w sposób stabilny) skończoną liczbę pozycji (najczęściej dwie - wysunięty, schowany).
Siłowniki dyskretne stosowane są w układach sterowania otwartego i omówiono je dokładnie w [1]. W tym ćwiczeniu rozważane będą wyłącznie siłowniki ciągłe.
Siłownik ciągły stanowi, razem z nastawnikiem (np. zawór lub przepustnica), zespół wykonawczy układu automatycznej regulacji (UAR) i służy do zmiany położenia elementu wykonawczego nastawnika. W wyniku tej zmiany, nastawnik zmienia strumień substancji ( energii) stanowiący wielkość wejściową do obiektu regulacji. Sygnałem wejściowym siłownika jest wyjście regulatora (rys.4.1).
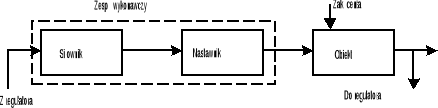
Rys.4.1. Miejsce siłownika w UAR
Producenci, aby ułatwić pracę projektanta, często dostarczają cały zespół wykonawczy.
4.1. Podział siłowników
W zależności od używanej energii pomocniczej siłowniki dzieli się na:
pneumatyczne,
hydrauliczne,
elektryczne.
Wśród siłowników elektrycznych można wyróżnić siłowniki elektromagnetyczne, siłowniki z silnikami o działaniu ciągłym i z silnikami o działaniu skokowym (te ostatnie przydatne w sterowaniu cyfrowym).
Charakterystyka dynamiczna siłownika określa współpracę z regulatorem. W przypadku typowego siłownika pneumatycznego membranowego, sygnał wyjściowy jest proporcjonalny do sygnału wejściowego (z pomijalną oscylacyjnością). W typowym siłowniku hydraulicznym tłokowym (człon całkujący), w przypadku sygnału skokowego na wejściu, sygnał wyjściowy (przesunięcie tłoka) rośnie liniowo w czasie z prędkością proporcjonalną do wartości amplitudy sygnału wejściowego (różnicy ciśnień). Siłowniki elektryczne pracują zwykle ze stałą prędkością. Mogą wykonywać trzy rozkazy: obracaj się w lewo, w prawo i stój. Siłownik elektryczny napędzany silnikiem współpracuje zwykle:
z regulatorem krokowym,
z ustawnikiem pozycyjnym składającym się z elementu trójstawnego sprawdzającego zgodność położenia siłownika z położeniem zadanym, określonym przez sygnał z regulatora elektrycznego ciągłego,
z elementem trójstawnym, z którym tworzy regulator trójstawny.
4.2. Siłowniki pneumatyczne
Siłowniki pneumatyczne dzieli się na membranowe i tłokowe. Najbardziej rozpowszechnione są siłowniki membranowe ze sprężyną, stosowane do napędu zaworów regulacyjnych, przepustnic, łopatek kierowniczych wentylatorów, oporników nastawnych, itp.
Siłowniki membranowe ze sprężyną, ze względu na kierunek ruchu trzpienia przy narastającym ciśnieniu zasilającym, dzieli się na:
proste - trzpień siłownika wysuwa się, gdy ciśnienie narasta,
odwrócone - trzpień siłownika chowa się, gdy ciśnienie narasta.
Dobór siłownika prostego lub odwróconego zależy od tego w jakim stanie powinien być zawór sterowany przez siłownik w sytuacji awaryjnej (np. braku ciśnienia zasilającego spowodowanego uszkodzeniem lub nieszczelnością instalacji) - jeśli
zawór powinien być otwarty, to wybieramy siłownik prosty.

Rys.4.2. Przekrój siłownika pneumatycznego: lewa połowa - siłownik prosty, prawa połowa - siłownik
odwrócony; 1 - króciec doprowadzający ciśnienie sterujące, 2 - membrana, 3 - króciec wyrównujący ciśnienia, 4 - sprężyna, 5.1 - górna część obudowy, 5.2 - dolna część obudowy, 6 - trzpień, 7 - pro-wadnica (piasta widełkowa), 8 - nakrętka
Na rys. 4.2 przedstawiono przekrój siłownika pneumatycznego. W siłowniku odwróconym sprężone powietrze (ciśnienie sterujące) doprowadzane jest króćcem 1 pod membranę 2. Wzrost ciśnienia powoduje przesunięcie trzpienia 6 w górę, do pozycji, w której następuje zrównoważenie siły Fx (oddziaływania sprężyny 4, proporcjonalnej do stopnia jej odkształcenia) i siły Fp (wynikającej z różnicy ciśnień pod i nad membraną, proporcjonalną do tej różnicy ciśnień). Czynna powierzchnia membrany mieści się zwykle w przedziale 120-2800 cm2, a skok trzpienia (odległość między dwoma skrajnymi położeniami trzpienia) mieści się zwykle w przedziale 7,5-63 mm.
Na rys. 4.3 przedstawiono przekrój i widok zespołu wykonawczego (siłownika połączonego z zaworem). Na pozycję trzpienia, oprócz sił Fx i Fp, , wpływa także obciążenie grzyba 2. Zmiana tego obciążenia powoduje powstanie niejednoznaczności w zależności między ciśnieniem sterującym a stopniem wysunięcia trzpienia. W celu ograniczenia tej niejednoznaczności, dopuszcza się obciążenie siłownika membranowego jedynie do 20% siły maksymalnej zdefiniowanej następująco:
Rys.4.3. Przekrój i widok ogólny zespołu wykonawczego; 1 - korpus zaworu, 2 - grzyb, 3 - osłona zaworu, 4 - uszczelnienie zaworu, 5 - prowadnica trzpienia, 6 - trzpień zaworu, 7 - połączenie trzpieni, 8.1 - trzpień siłownika, 8.2 - dławnica siłownika, 8 - siłownik
|
(4.1) |
gdzie: ![]()
- wartość ciśnienia, przy której trzpień siłownika zaczyna się przesuwać,
![]()
- wartość ciśnienia, przy której następuje całkowite przesunięcie trzpienia siłownika,
![]()
- powierzchnia czynna membrany siłownika.
Oprócz wspomnianej wyżej niejednoznaczności, w zespole wykonawczym, mamy do czynienia z histerezą, której istnienie można wyjaśnić następująco:
dla narastającego ciśnienia sterującego ps, z pewnym przybliżeniem, dla ustalonego ps , trzpień przyjmie położenie x1 i, w stanie równowagi, zachodzi równość sił:
dla malejącego ciśnienia sterującego ps, z pewnym przybliżeniem, dla ustalonego ps , trzpień przyjmie położenie x2 i, w stanie równowagi, zachodzi równość sił:
liniowe, w których element wyjściowy realizuje ruch prostoliniowy zwrotny,
wahliwe, w których ruch odbywa się na drodze kątowej mniejszej od kąta pełnego,
obrotowe, w których ruch odbywa się na drodze kątowej większej od kąta pełnego.
silnik elektryczny (najczęściej jednofazowy prądu zmiennego),
przekładnia redukcyjna przekazująca napęd z silnika na element wyjściowy,
element wyjściowy w postaci trzpienia, korby lub wału.
zadajnik położenia (np. potencjometr) odwzorowujący położenie elementu wyjściowego,
luzownik ograniczający wybieg elementu wyjściowego (po wyłączeniu sygnału sterującego),
układ zabezpieczający przed skutkami przeciążenia siłownika,
wyłączniki krańcowe,
dodatkowe wyłączniki drogowe (sygnalizujące wyróżnione położenia).
lżejsze od siłowników elektrycznych analogicznej mocy,
mniej skomplikowane,
bezpieczne nawet w atmosferze wybuchowej (nie iskrzą).
znacznie wolniejszym zużyciu części,
większej (na ogół) sprawności,
niewystępowaniu w nich zjawisk rezonansowych w zakresie małych częstotliwości zakłóceń (kłopotliwe zwłaszcza w siłownikach pneumatycznych).
Wyznaczyć charakterystyki statyczne siłownika pneumatycznego:
Wyznaczyć wartość początkową ciśnienia sterującego i zakres proporcjonalności siłownika z ustawnikiem pozycyjnym.
Wyznaczyć prędkość, czas przejścia oraz histerezę siłownika elektrycznego.
Wyznaczyć dokładność statyczną i przebieg odpowiedzi skokowej siłownika elektrycznego z ustawnikiem pozycyjnym.
Co to jest charakterystyka statyczna?
Opisać budowę siłowników membranowych prostych i odwróconych.
Podać definicje i maksymalnej siły siłownika.
Opisać budowę i zalety ustawnika pozycyjnego pneumatycznego.
Opisać budowę i podać zalety ustawnika pozycyjnego elektrycznego.
Porównać wady i zalety siłowników pneumatycznych, hydraulicznych i elektrycznych.
|
(4.2) |
w którym pa - ciśnienie atmosferyczne, k - stała sprężyny, FT - siła tarcia,
|
(4.3) |
Z (2) i (3), szerokość histerezy Δx=x2-x1 równa jest:
|
(4.4) |
Aby „osłabić” wpływ tak niekorzystnych zjawisk jak niejednoznaczność czy histereza, wyposaża się siłownik w ustawnik pozycyjny. Schemat takiego zespołu przedstawiono na rys.4.4.
Rys.4.4. Schemat ustawnika pozycyjnego współpracującego z siłownikiem; 1 - siłownik, 2 - mieszek wejściowy, 3 - dysza kaskady sterującej wzmacniaczem, 4 - wzmacniacz, 5 - dźwignia sprzężenia zwrotnego, 6 - sprężyna
Zasada działania ustawnika jest następująca. Ciśnienie px określa położenie trzpienia siłownika. Jeśli wysunięcie trzpienia y jest zbyt małe, to następuje zdławienie dyszy 3, co powoduje wzrost ciśnienia kaskadowego pk. Wzrost ciśnienia pk powoduje wzrost ciśnienia na wyjściu wzmacniacza 4 (zasilanego ciśnieniem pz), które oddziaływując na membranę spowoduje wysunięcie trzpienia. Wysuwanie trzpienia powoduje otwieranie dyszy 3 do momentu , aż układ osiągnie stan równowagi.
®
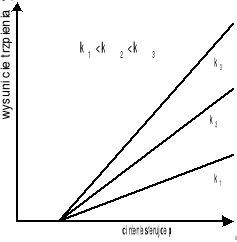
Rys.4.5. Rodzina charakterystyk y=y(px)
dla różnych współczynników wzmocnienia ki ustawnika pozycyjnego
Ustawniki pozycyjne umożliwiają, ponadto, zwiększenie ciśnienia zasilającego siłownik, co powoduje zwiększenie szybkości jego działania. Za pomocą ustawników można również zmieniać nachylenie funkcji wysunięcia trzpienia od ciśnienia sterującego, co zmienia zakres przemieszczeń trzpienia siłownika (rys.4.5).
4.3. Siłowniki elektryczne, silnikowe
Ze względu na typ urządzenia wyjściowego wyróżnia się następujące rodzaje siłowników elektrycznych silnikowych:
Wyróżnia się następujące podzespoły główne siłownika elektrycznego:
Siłowniki elektryczne mogą być ponadto wyposażone w elementy pomocnicze, takie jak:
Ze względu na prędkość elementu wyjściowego, siłowniki dzieli się na stało- i zmiennoprędkościowe.
Współpraca siłownika elektrycznego silnikowego z regulatorem elektrycznym ciągłym wymaga zastosowania specjalnego układu ustawnika pozycyjnego. Schemat takiego układu przedstawiono na rys.4.5.
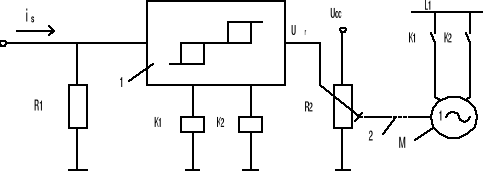
Rys.4.5. Schemat współpracy ustawnika pozycyjnego z siłownikiem elektrycznym; 1 - regulator trójstawny; M - silnik jednofazowy prądu zmiennego; K1, K2 - przekaźniki załączające silnik M w obu kierunkach; 2 - realizacja sprzężenia zwrotnego (stopnia wysunięcia trzpienia siłownika z napięciem Ur
Układ działa w następujący sposób. Prąd iS jest sygnałem sterującym. Na zaciskach rezystora R1 odkłada się napięcie US≅iSR1, którego wartość jest porównywana przez regulator 1 z napięciem Ur (które zależy od rezystancji między masą a ruchomym ramieniem potencjometru R2 i napięcia UCC). Jeśli US jest większe od Ur o wartość większą niż zadana, następuje wysterowanie przekaźnika K1, który powoduje ruch trzpienia siłownika, który przemieści ruchome ranię potencjometru R2 w tą stronę, w którą zwiększać się będzie napięcie Ur. Analogicznie można przeanalizować sytuację, gdy US jest mniejsze od Ur o wartość większą niż zadana na regulatorze.
4.4. Porównanie własności siłowników
Siłowniki (elementy wykonawcze) hydrauliczne i pneumatyczne przewyższają pod wieloma względami siłowniki elektryczne. Przejawia się to w tym, że pneumatyczne i hydrauliczne siłowniki są:
Elektryczne elementy wykonawcze wykazują natomiast wyższość nad pneumatycznymi i hydraulicznymi, która polega na:
O powszechności stosowania elektrycznych siłowników decyduje przede wszystkim łatwy dostęp do zasilania z sieci elektrycznej.
4.5. Zadania do wykonania
bez ustawnika pozycyjnego,
z ustawnikiem pozycyjnym.
Porównać histerezę w obu przypadkach.
4.6. Pytania kontrolne
4.7. Literatura
[1] Laboratorium sterowania procesami dyskretnymi, pod red. E. Ślifirskiej, Wyd. Politechniki Wrocławskiej 1998.
[2] B. Chorowski, M. Werszko, Mechaniczne urządzenia automatyki, WNT, Warszawa 1990, s.262-270.
Wyszukiwarka
Podobne podstrony:
Ćwiczenie? doc
Ćwiczenie? doc
ćwiczenie 9 doc
ĆWICZE~1 (5) DOC
Ćwiczenie 4 (2) doc
Uczymy się bawić oraz wykonywać ćwiczenia doc
ćwiczenia (3) doc
Ćwiczenie 2 (3) doc
ćwiczenie 6 doc
ćwiczenie 8 (2) doc
Ćwiczenie 2 (5) doc
Ćwiczenie 5 (2) doc
Ćwiczenie 8 doc
ćwiczenie 3 doc
ĆWICZE~2 DOC
Cwiczenie4 doc
Informatyka Laboratorium MS Word ćwiczenie 2 DOC
ĆWICZE~2 (2) DOC
Wytrzymałość ćwiczenie 5 DOC
więcej podobnych podstron