1
Wykłady uzupełniające,
Budownictwo, I rok, studia magisterskie
Wykład 1
1.
Wektory
Wektor – uporządkowana para punktów.
Trzy wielkości, charakteryzujące:
•
Zwrot
•
kierunek
•
Wartość (długość – moduł wektora)
Rodzaje wektorów:
a)
Swobodne;
b)
W układzie współrzędnych
Działania na wektorach:
1.
Mnożenie przez liczbę,
2.
Dodawanie wektorów,
3.
Mnożenie wektorów;
a)
Skalarne;
b)
Wektorowe;
4.
Normalizacja wektora
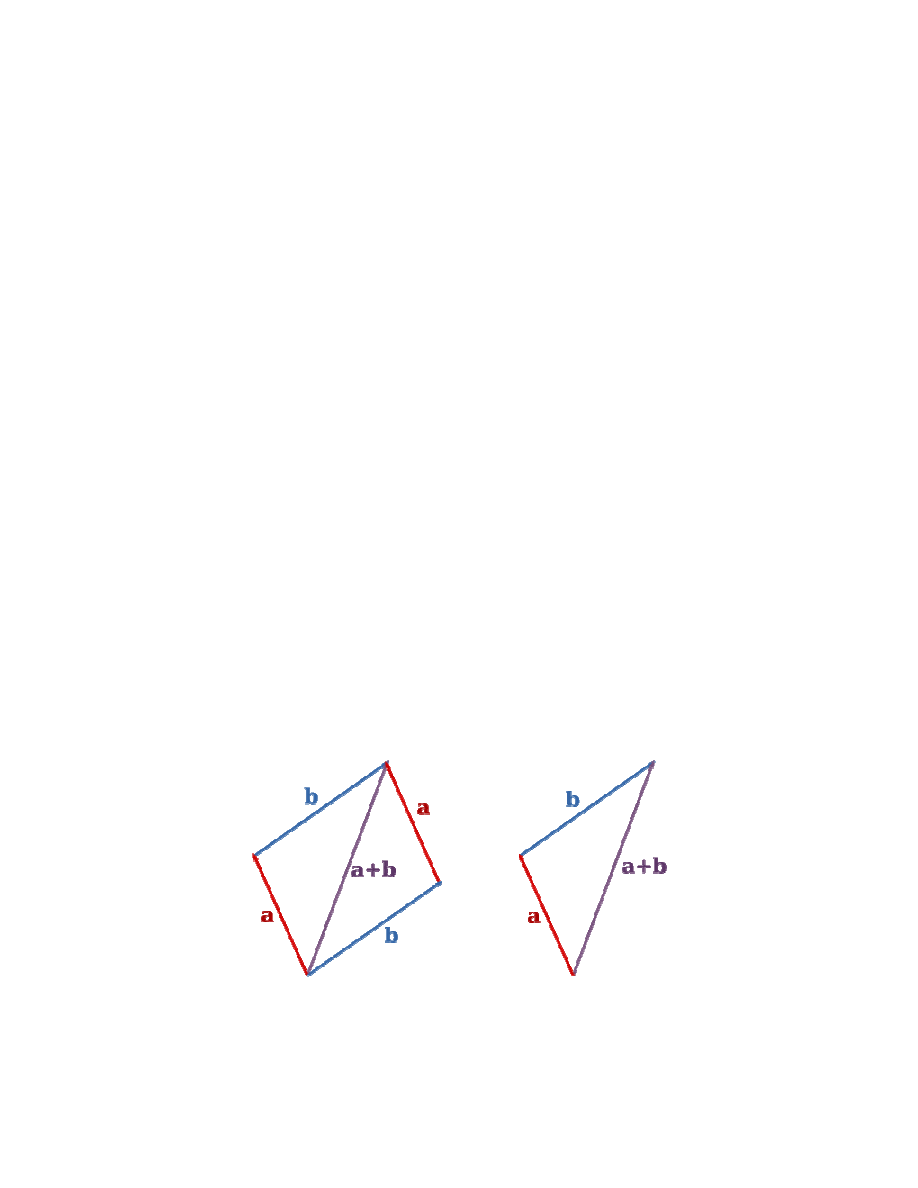
Dodawanie wektorów
Graficzne dodawanie wektorów swobodnych
Rys. 1. Dodawanie wektorów
2
]
,
,
[
ˆ
ˆ
ˆ
z
y
x
z
z
y
y
x
x
a
a
a
e
a
e
a
e
a
a
=
⋅
+
⋅
+
⋅
=
r
]
,
,
[
ˆ
ˆ
ˆ
z
y
x
z
z
y
y
x
x
b
b
b
e
b
e
b
e
b
b
=
⋅
+
⋅
+
⋅
=
r
Suma wektorów:
]
,
,
[
z
z
y
y
x
x
b
a
b
a
b
a
b
a
+
+
+
=
+
r
r
Iloczyn skalarny wektorów
)
,
cos(
b
a
b
a
b
a
r
r
r
r
∠
⋅
⋅
=
⋅
z
z
y
y
x
x
b
a
b
a
b
a
b
a
⋅
+
⋅
+
⋅
=
⋅
r
r
Własności
a)
przemienny
b)
pole powierzchni
c)
równy zero dla wektorów prostopadłych
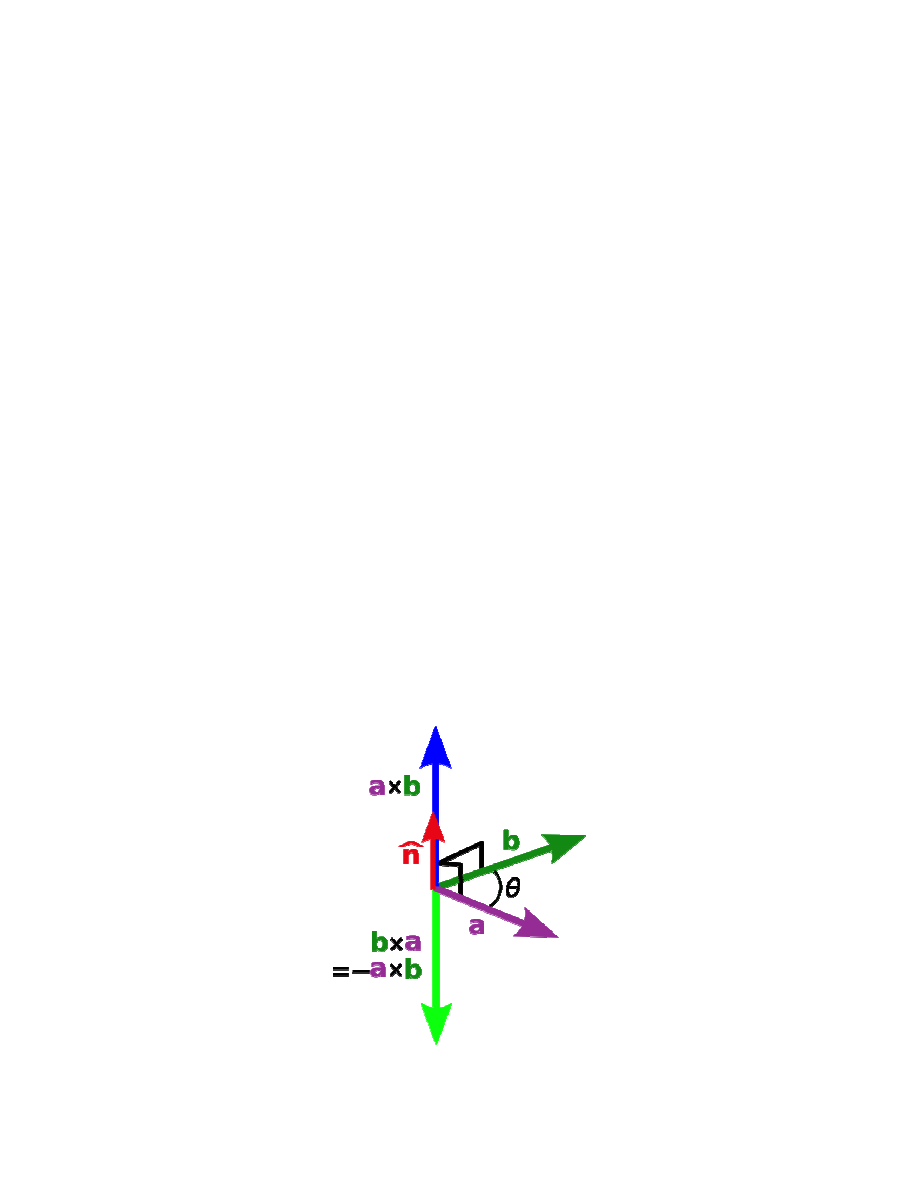
Iloczyn wektorowy
Własności wektora (do wyznaczenia)
a)
kierunek,
b)
zwrot
c)
wartość, długość wektora
Rys. 2. Iloczyn wektorowy
3
Długość iloczynu wektorowego:
)
,
sin(
b
a
b
a
b
a
r
r
r
r
∠
⋅
⋅
=
×
)
(
ˆ
)
(
ˆ
)
(
ˆ
ˆ
ˆ
ˆ
x
y
y
x
z
z
x
x
z
y
y
z
z
y
x
z
y
x
z
y
x
z
y
x
b
a
b
a
e
b
a
b
a
e
b
a
b
a
e
b
b
b
a
a
a
e
e
e
b
a
−
+
−
+
−
=
=
=
×
r
r
Własności iloczynu wektorowego:
a)
nieprzemienny,
b)
równy zero dla wektorów równoległych
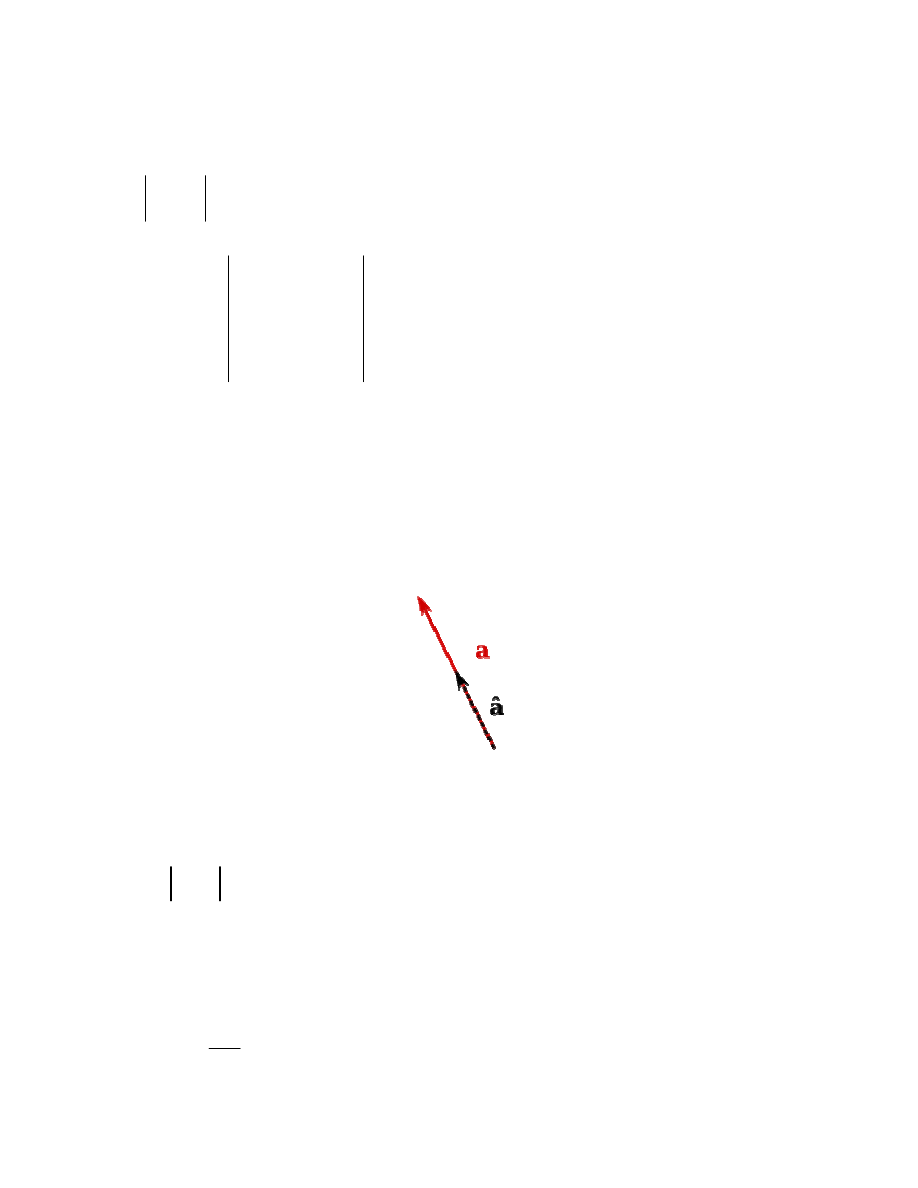
Wektor jednostkowy, normalizacja wektora
Rys. 3. Normalizacja wektora
Wektor i wersor.
1
)
(
ˆ
)
(
ˆ
lub
1
)
(
ˆ
)
(
ˆ
)
(
)
(
=
⋅
=
⋅
=
t
a
t
a
t
a
t
a
t
a
t
a
r
4.
Pochodna wektora
;
t
d
r
d
v
r
r
=
4
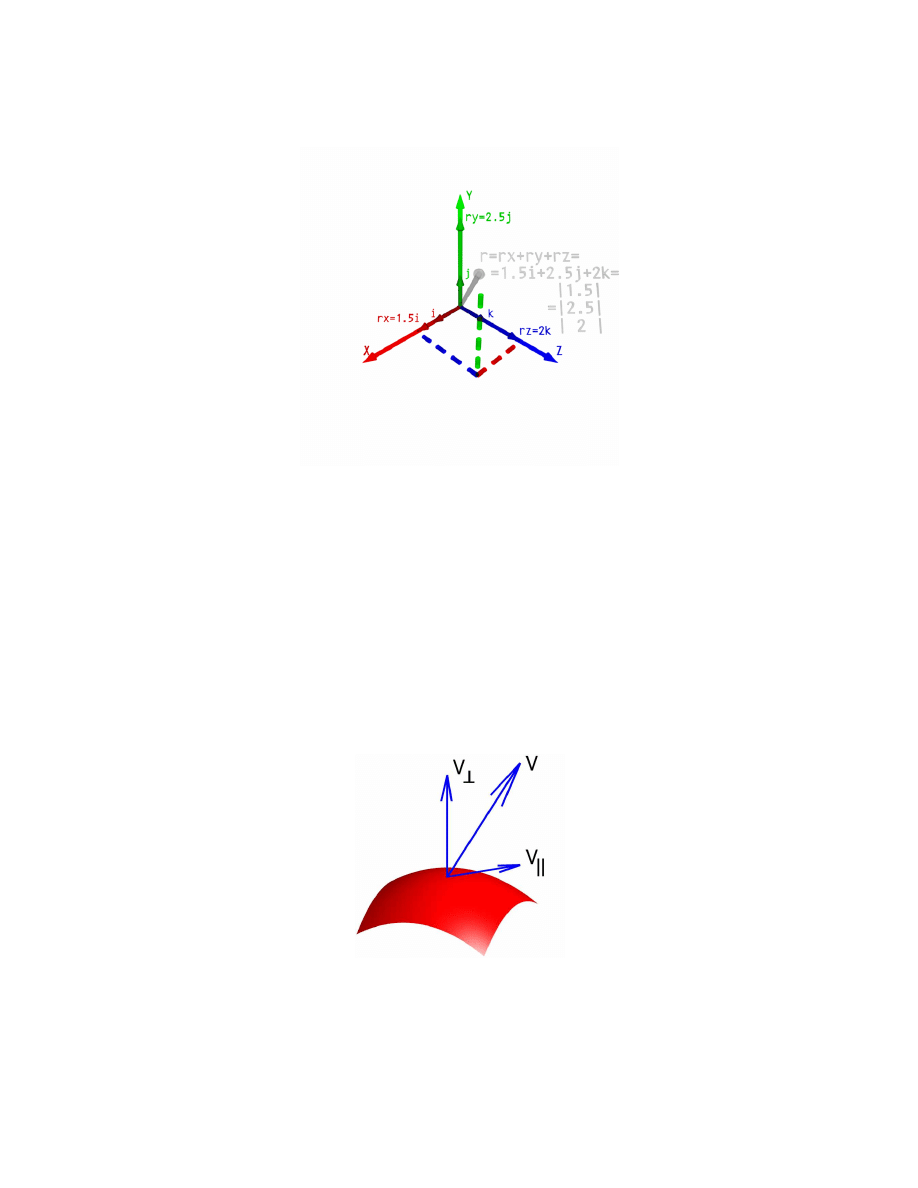
Wektor w kartezjańskim układzie współrzędnych
Rys. 4. Układ kartezjański i wektory w układzie współrzędnych
Użyteczne tożsamości wektorowe:
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
ˆ
)
(
ˆ
)
(
ˆ
;
a
c
b
b
a
c
c
b
a
c
a
b
b
c
a
c
b
a
a
c
b
b
c
a
c
b
a
b
a
b
a
e
b
a
b
a
e
b
a
b
a
e
b
a
b
a
b
a
b
a
b
a
x
y
y
x
z
z
x
x
z
y
y
z
z
y
x
z
z
y
y
x
x
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
r
×
⋅
=
×
⋅
=
×
⋅
⋅
⋅
−
⋅
⋅
=
×
×
⋅
⋅
−
⋅
⋅
=
×
×
−
+
−
+
−
=
×
+
+
=
⋅
Rys. 5. Składowe wektora: normalna i styczna do powierzchni
5
Zadanie 1
Dane są dwa wektory:
]
5
,
4
,
3
[
ˆ
5
ˆ
4
ˆ
3
=
⋅
+
⋅
+
⋅
=
z
y
x
e
e
e
a
r
]
1
,
0
,
1
[
ˆ
1
ˆ
1
−
=
⋅
+
⋅
−
=
z
x
e
e
b
r
Obliczyć:
a)
długość każdego z wektorów,
b)
iloczyn skalarny
b
a
r
r
⋅
c)
iloczyn wektorowy
b
a
r
r
×
,
d)
kąt zawarty między wektorami
Zadanie 2
Równania ruchu dwóch punktów w pewnym określonym układzie
współrzędnych są następujące:
]
2
,
3
,
4
[
ˆ
2
ˆ
3
ˆ
4
1
−
=
⋅
+
⋅
−
⋅
=
z
y
x
e
e
e
r
r
]
1
,
2
,
1
[
ˆ
1
ˆ
2
ˆ
1
2
=
⋅
+
⋅
+
⋅
=
z
y
x
e
e
e
r
r
Obliczyć:
a)
długości obydwu wektorów,
b)
przemieszczenie drugiego punktu względem pierwszego
12
r
r
,
c)
kąty między tymi trzema wektorami,
d)
rzut wektora
12
r
r
na
1
r
r
,
e)
iloczyn wektorowy
2
1
r
r
r
r
×
Zadanie 3
Równania ruchu dwóch punktów w określonym układzie współrzędnych są
następujące:
[
]
2
1
]
0
,
1
,
1
[
]
2
,
1
,
3
[
0
,
2
,
0
t
t
r
⋅
+
⋅
+
=
r
[ ]
t
r
⋅
+
=
]
1
,
2
,
0
[
1
,
0
,
1
2
r
Obliczyć:
a)
prędkość v
r
drugiego punktu względem pierwszego
b)
przyśpieszenie a
r
drugiego punktu względem pierwszego.

6
Zadanie 4
Punkty A i B poruszają się wzdłuż osi OX i OY z prędkościami
]
0
,
2
[
=
A
v
[m/s]
i
]
3
,
0
[
=
B
v
[m/s]. W chwili początkowej
0
=
t
znajdują się w punktach
]
0
,
3
[
−
=
A
r
[m],
]
3
,
0
[
−
=
B
r
[m]. Obliczyć
B
A
AB
r
r
r
r
r
r
−
=
, położenie punktu B
względem A. Kiedy te punkty znajdą się najbliżej siebie i w jakiej odległości?
Zadanie 5
Sprawdzić poprawność tożsamości:
)
(
)
(
)
(
a
b
c
c
a
b
c
b
a
r
r
r
r
r
r
r
r
r
⋅
⋅
−
⋅
⋅
=
×
×
Wyszukiwarka
Podobne podstrony:
Propedeutyka Pediatrii wykłady dodatkowe
dr Robaczyński, Wykłady dodatkowe, 14/05/2010
wykady pozyt, Wykład dodatk , Wykład I (dodatkowy)
wykład, Funkcje cyklometryczne wykład dodatkowy, Funkcje cyklometryczne
wykłady dodatkowo- nowe, Ekonomia, Studia, I rok, Finanase publiczne, Wykłady-stare, Wykłady
Ekonomia menedzerska wyklady dodatkowe id 155947
Wykład dodatkowy I Płuca i opłucna
Technologia Informacyjna - Wykład 3 Dodatkowe, ściągnięte, IT, technologia informacyjna(4)
BPZ wykłady dodatkowe
Propedeutyka Pediatrii wykłady dodatkowe
Wykłady Dodatki do żywności
Makroekonomia wykład 3(dodatki z netu)
wykłady dodatki
Rola badań dodatkowych w diagnostyce chorób wewnętrznych wykład
Rysunek w poznaniu dziecka mat dodatkowe do wykładu
więcej podobnych podstron