MOMENT MASZYNY ASYNCHRONICZNEJ W STANIE
USTALONYM
(wzór Klossa)
Moment elektromagnetyczny maszyny asynchronicznej można wyrazić wzorem:
s
R
I
p
M
r
e
r
'
2
'
1
3
ω
=
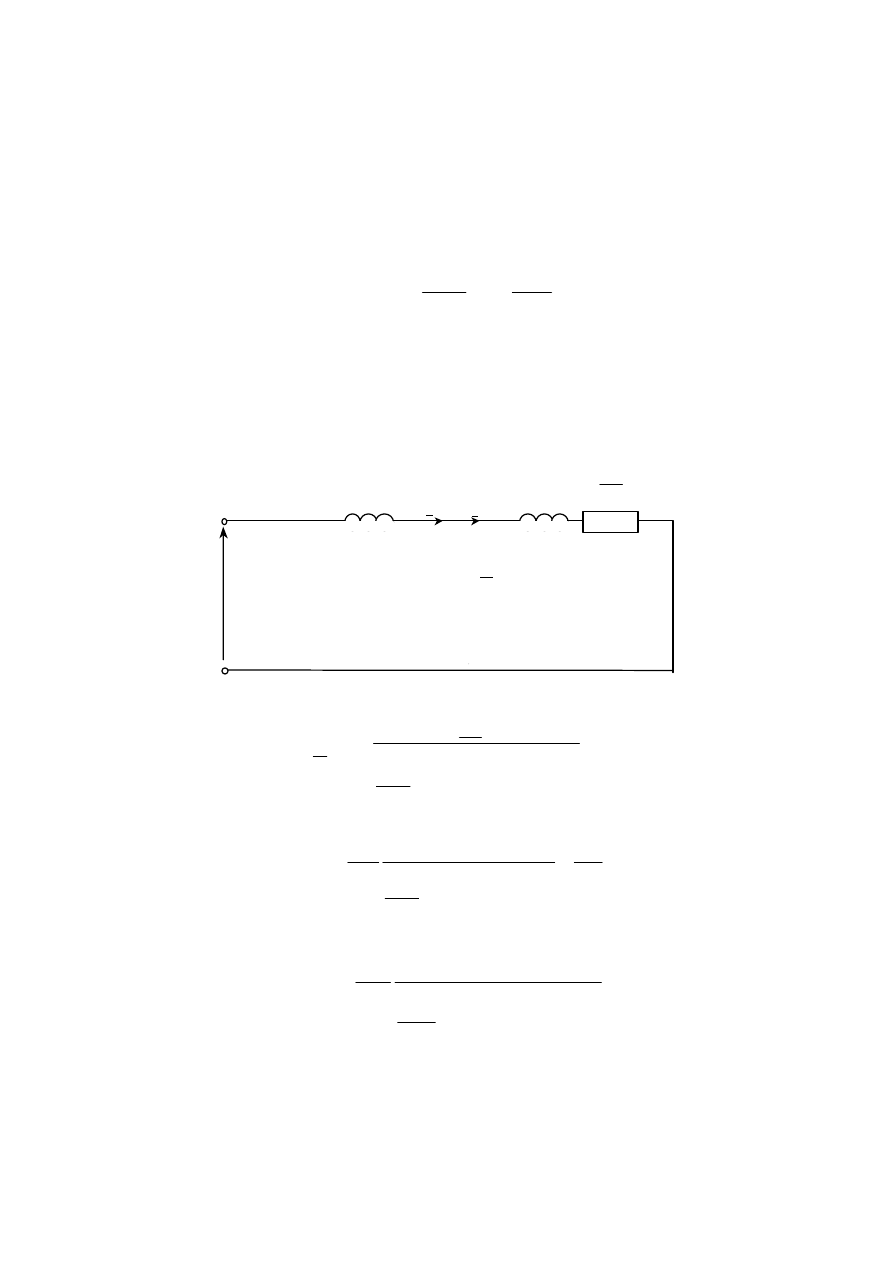
Na potrzeby wyznaczenia momentu uprośćmy schemat zastępczy
maszyny asynchronicznej pomijając gałąź poprzeczną (R
fe
i X
µ
) oraz przyjmują,
że:
R
r
/s>>R
s
jX
σ
s
'
r
jX
σ
s
R
r
'
U
s
I
s
I
r
’
Otrzymamy:
)
(
'
'
'
r
s
r
s
X
X
j
s
R
U
I
r
+
+
=
s
R
X
X
s
R
U
p
M
r
r
s
r
s
e
'
2
'
2
2
'
2
1
*
)
(
3
+
+
=
ω
2
'
2
'
'
2
1
)
(
3
r
s
r
r
s
e
X
X
s
s
R
R
U
p
M
+
+
=
ω
Wartość maksymalna momentu wyznaczymy z warunku:
-1-
0
=
ds
dM
e
0
)
(
2
'
2
2
'
=
+
+
−
r
s
r
X
X
s
R
'
'
r
s
r
k
X
X
R
s
+
±
=
Dla takiego poślizgu, nazywanego poślizgiem krytycznym moment
jest równy:
)
(
2
3
'
2
1
r
s
s
k
X
X
U
p
M
+
±
=
ω
Jeśli wartość momentu podzielimy przez tą wartość momentu,
nazywanego momentem krytycznym, otrzymamy wzór Klossa:
s
s
s
s
M
M
k
k
k
e
+
=
2
Wzór Klossa jest bardzo wygodnym uproszczeniem
charakterystyki mechanicznej silnika asynchronicznego, stąd bardzo
często używany jest w technice napędu elektrycznego do szacowania
różnych wielkości w silniku asynchronicznym np. na podstawie
danych katalogowych. W katalogu podaje się m.in. parametr:
λ
=
n
k
M
M
Możemy szacować wartość poślizgu krytycznego ze wzoru
Klossa:
λ
2
=
+
n
k
k
n
s
s
s
s
0
2
2
2
=
+
−
n
k
n
k
s
s
s
s
λ
-2-
)
1
(
4
4
4
2
2
2
2
2
−
=
−
=
∆
λ
λ
n
n
n
s
s
s
2
)
1
(
2
2
2
−
±
=
λ
λ
n
n
k
s
s
s
)
1
(
2
−
±
=
λ
λ
n
k
s
s
Z uwagi na symetrię względem poślizgu znamionowego i
krytycznego do obliczenia poślizgu krytycznego należy stosować
znak "+":
)
1
(
2
−
+
=
λ
λ
n
k
s
s
Analogiczne obliczenia poślizgu dla danego momentu (na części
stabilnej charakterystyki mechanicznej) należy wykonywać wg
zależności:
)
1
)
(
(
2
−
−
=
M
M
M
M
s
s
k
k
k
Postępowanie takie umożliwia szacowanie charakterystyk
momentu na podstawie danych katalogowych, także po wtrąceniu
rezystancji dodatkowej do obwodu wirnika, wówczas mamy bowiem:
s
s
s
s
M
M
k
k
k
e
+
=
2
'
'
'
r
s
d
r
k
X
X
R
R
s
+
+
±
=
)
(
2
3
'
2
1
r
s
k
X
X
U
p
M
s
+
±
=
ω
Wynikają stąd ważne wnioski dotyczące zależności momentu od
napięcia i częstotliwości:
-3-
2
2
f
U
c
M
s
k
=
oraz wnioski dotyczące kształtowania momentu (np. rozruchowego)
poprzez wtrącenie do obwodu wirnika dodatkowej rezystancji
Dokładniejszą postać wzoru Klossa otrzymamy przy
uwzględnieniu R
s
oraz X
µ
. Otrzymamy wówczas:
ε
ε
k
k
k
k
k
e
s
s
s
s
s
s
M
M
2
)
1
(
2
+
+
+
=
gdzie:
)
)
(
(
2
2
'
2
s
s
r
s
X
X
R
R
X
R
+
+
=
µ
µ
ε
2
'
2
'
)
(
r
s
s
r
k
X
X
R
R
s
+
+
±
=
Rezystancję stojana pomija się zwykle dla silników o mocy większej
niż 10kW (wówczas
ε=0 oraz R
s
=0) i wówczas pełny wzór Klossa
przyjmuje postać uproszczoną.
Uwaga!
Przedstawione wyżej zależności wymagają uzupełnienia,
szczególnie w sytuacji, gdy zmieniamy częstotliwość napięcia
zasilającego. W
przypadku częstotliwości bliskich znamionowej
można stosować uproszczony wzór Klossa, natomiast obniżenie
częstotliwości powoduje, że niezbędne jest uwzględnienie rezystancji
stojana, czyli użycie pełnej zależności.
Należy też uwzględnić przypadek skrajny f=0!. Biorąc pod
uwagę analizę polegającą na sprowadzaniu wielkości wirnika na
stronę stojana otrzymamy stan gdy prąd jest wartością stałą – nie
istotne są zatem wartości reaktancji – w schemacie zastępczym (od
strony stojana) występuje jedynie rezystancja uzwojenia stojana.
-4-
Pojawia się tu pytanie: jaki występuje tu moment obrotowy w sytuacji
wirowania wirnika? Sytuację mamy następującą:
1. prąd stały w uzwojeniach stojana wytwarza stały strumień
2. wirowanie wirnika z prędkością
ω powoduje powstanie siły
elektromotorycznej sinusoidalnej o wartości zależnej od
aktualnej prędkości i od prądu stojana o częstotliwości
wynikającej z prędkości obrotowej wirnika
ω
s
I
k
E
r
=
3. Taka wartość siły elektromotorycznej wytwarza prąd
ograniczony rezystancją i reaktancją rozproszenia:
r
r
r
L
j
R
E
I
r
ω
+
=
4. W celu stosowania parametrów dla stanu znamionowego
występujące w równaniu tym zależności przedstawić można
jako:
r
r
s
L
j
R
I
k
I
r
1
1
1
1
ω
ω
ω
ω
ω
ω
+
=
5. Biorąc pod uwagę, że
ω
1
jest pulsację przy częstotliwości
znamionowej otrzymamy:
r
r
s
X
j
R
I
k
I
r
1
1
'
ω
ω
ω
ω
+
=
6. Oznaczając względną wartość prędkości jako
σ otrzymamy:
r
r
s
jX
R
I
k
I
r
+
=
σ
'
-5-

-6-
Wyszukiwarka
Podobne podstrony:
maszyny asynchroniczne wzór klossa
Maszyny Elektryczne 1 (sem III) 4 Pole Wirujące
Maszyny Elektryczne 1 (sem. III), 7 Moment Elektromagnetyczny
Maszyny Elektryczne 1 (sem III 5 Stany nieustalone transformat
Maszyny Elektryczne 1 (sem III 1 Wprowadzenie id 281986
Tem egz sem III 12 2013 zerówka
Maszyny Elektryczne 2 (sem IV) Zasada działania silnika i prądnicy prądu stałego
Maszyny Elektryczne 2 (sem IV) Stan Ustalony Maszyny Synchronicznej
wykład 2, Mechanika i budowa maszyn, III semestr, Sem III od kogoś, terma skraw, terma
PKM Opracowanie sreszke, sem III, Podstawy Konstrukcji Maszyn
Maszyny elektryczne - IV semestr- egzamin - 2 maszyna asynch, SZELĄG 4 SEMESTR
Lab Maszyny elektryczne II III cia seria
więcej podobnych podstron